不同續航里程動力輔助系統啟停控制優化
2017-02-10 07:06:02林歆悠張少博馮其高福州大學機械工程及自動化學院福州350002
中國機械工程 2017年1期
林歆悠 張少博 馮其高福州大學機械工程及自動化學院,福州,350002
不同續航里程動力輔助系統啟停控制優化
林歆悠 張少博 馮其高
福州大學機械工程及自動化學院,福州,350002
針對某款增程式電動車,為滿足不同負荷功率需求,制訂了多點能量管理策略,以油耗最小為目標構建了動力輔助系統(APU)啟停控制優化模型,以性能指標和電池循環壽命為約束,優化了不同工況不同行駛里程的APU啟停控制參數,實現了續航里程自適應APU啟停控制。結果表明:與優化前油耗相比,NEDC100/NEDC200、CUDC100/CUDC200分別減少15.87%/2.09%、42.24%/14.54%。對比優化前后能量消耗,得到同里程下減少油耗方式:單一負荷下,縮短APU工作時間;不同負荷情況下,延長中低負荷下工作時間,從而縮短高負荷下工作時間。
增程式電動車;續航里程;動力輔助系統;啟停控制
0 引言
由于能源危機,汽車制造商很早就出于家用或商用的目的,致力于純電動汽車的性能改善。然而,與傳統內燃機汽車相比,有限的里程仍然是它不可逾越的障礙。統計研究表明,純電動汽車單次充電可以滿足90%的日常行駛需求[1-2]。但是,用戶在遇到偶爾超出電動車可用行駛里程或恰好在電池無電可用但需要使用情況下,純電動汽車就會顯得“束手無策”。此外,在現有電池技術條件下,環境因素將嚴重影響純電動汽車的行駛里程,低的室外溫度條件下,電動汽車行駛里程幾乎縮水20%。這些因素都使得增程式電動車(range-extended electric vehicle,R-EEV)成為目前的研究焦點[3]。
由于增程式電動車可以從發電機組和外接電網獲得電能,故它被歸類為插電式串聯混合動力汽車。混合動力汽車能量管理策略的目標主要是在滿足車輛性能的條件下,通過有效的模式切換和能量分配使得燃油經濟性最優,可以將其歸納為基于直觀邏輯規則和基于優化算法兩類。
基于規則的控制策略由于簡單易行被廣泛應用。文獻[4]針對非線性的插電式串聯混合動力汽車系統,利用模糊邏輯建立了基于規則的能量管理策略,但是這些規則不適用于多變量的復雜系統。文獻[5]針對一款增程式電動車,在研究發動機定點能量管理策略的基礎上,以燃油經濟性為目標對增程器的開關時刻進行了優化,沒有考慮負荷的變化對需求功率的影響。文獻[6]也是針對定點能量管理策略,研究了通過縮短定里程下發動機工作時間來減少油耗,但對于多點能量管理策略而言,發動機工作時間最短并不意味著燃油消耗最少。為此,通過研究特定里程下,多點工作模式下動力輔助系統的啟停對油耗的影響,分析影響油耗的因素,建立油耗與其影響因素之間的關系成為需要解決的關鍵問題。
對于優化算法的控制策略,在解決全局最優問題中,動態規劃和最小值原理是優化算法中常用的方法,但是動態規劃常遭遇“維數災難”[7]。最小值原理涉及在邊界約束下解復雜的哈密頓函數[8]。等效燃油消耗最小控制策略作為瞬時優化算法,并不能保證全局最優[9]。文獻[10]利用改善的粒子群優化(PSO)算法構建了三輸入(轉速、電池荷電狀態(SOC)、需求轉矩)單輸出(能量分配系數)的次優能量管理模型。文獻[11]利用PSO算法來設計插電式混合動力汽車控制參數,以燃油經濟性為適應度函數,在不犧牲動力性的條件下,改善了燃油經濟性,并研究優化后的控制參數在不同工況下的表現。文獻[12]通過PSO算法優化動力系統參數和控制策略參數,從而減少油耗、排放和降低混合動力汽車(HEV)的制造成本。
本文基于動力輔助系統多點工作模式控制策略,研究了各負荷點的工作時間、油耗、啟停次數隨動力輔助系統啟停閥值SAPU_strat和SAPU_off的變化,來建立油耗和行駛里程L、負荷P、SAPU_strat和SAPU_off之間的關系,從而構建四輸入單輸出的適應度函數模型。以油耗最小為目標建立優化模型,以性能指標和電池壽命為約束,利用PSO算法優化不同工況不同行駛里程下的動力輔助系統(APU)啟停控制參數,以此實現里程自適應APU啟停控制。
1 R-EEV動力系統
如圖1所示,增程式電動車動力系統主要包括動力電池組、APU、電機驅動系統和動力傳動系統。
增程式電動車與串聯式混合動力汽車的動力系統結構類似,但是與串聯式不同的是增程式電動車的動力電池為主能源,發動機只用于發電,不直接參與汽車驅動。增程式電動汽車有兩種工作模式:①純電動模式(EV),電量充足時,發動機不工作,驅動電機由動力電池提供能量,也可稱作電量消耗階段;②增程驅動模式(RE),當電量消耗至低于閥值時,APU啟動,提供的電能一部分用于驅動,另一部分為動力電池充電,當電量恢復至充足時,發動機又停止工作,繼續由電池為電機驅動提供能量,也可稱作電量保持階段。增程式電動車的能量流動如圖1箭頭所示。圖1中,VCU表示整車控制器;CAN表示控制器局域網絡;EMS表示發動機控制系統;BMS表示電池管理系統;ISG電機為啟動/發電一體化電機。
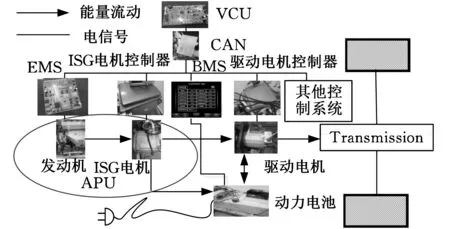
圖1 R-EEV動力系統結構及能量流動Fig.1 Power-train and energy flow of R-EEV
1.1 R-EEV動力性指標
以某款R-EEV為原型車,其性能指標如表1所示,性能指標直接決定動力系統參數的匹配。

表1 某款R-EEV性能參數Tab.1 Performance parameters for R-EEV
1.2 動力電池模型
動力電池組作為R-EEV的主能源,根據性能指標匹配的磷酸鐵鋰電池如表2所示。采用內阻模型來計算電池荷電狀態S,開路電壓Voc(S,T)主要與S和溫度T有關,等效內阻Rb通過試驗獲得。S的精確計算是能量管理的基礎[13]。回路電流的計算公式為
(1)
式中,Pb為電池功率。
則SOC隨時間的變化如下:
(2)
式中,Sinit為初值;Qmax為電池總容量,A·h。

表2 磷酸鐵鋰電池主要參數Tab.2 Main parameters of phosphoric acid iron battery
1.3 動力輔助系統模型
APU作為延長車輛里程的輔助能源,是R-EEV關鍵部件之一,參數匹配結果如表3所示,發動機的萬有特性曲線如圖2所示。圖中線條上大于100的數據表示燃油消耗率,單位為g/(kW·h);小于100的數據表示發動機功率,單位為kW。

表3 APU工作參數Tab.3 Operational parameters of APU

圖2 發動機萬有特性曲線Fig.2 The map of engine fuel consumption characteristics
2 基于不同里程的APU啟停控制
2.1 APU多點工作模式控制策略
文獻[14]采用人工智能算法來預估電動汽車的純電動行駛里程,但是由于計算量大,這些方法在增程式電動車的純電動里程預測時可行性變差。文獻[15]針對插電式混合動力汽車純電動行駛里程預測提出了三種簡單模型:基于牛頓力學的物理模型、能量模型和SOC模型。本文采用SOC模型對增程式電動車的純電動續航里程進行預先估計,其續航里程和SOC的關系可表示如下:
(3)
式中,S0為當前初始電池荷電狀態;SAPU_start為增程器開啟時的SOC值;h為電池的健康狀況表征值;Lrange0為電池額定容量下的某工況下最大純電行駛里程;Lrange為由初始S0決定的某工況下純電行駛里程。
R-EEV開始啟動時,駕駛員設定目標行駛里程L, VCU根據目標行駛里程L進入到數據庫中,選擇事先存儲的與之對應的控制策略參數,并根據BMS提供的初始S0計算電池能夠支持的純電里程Lrange。
VCU根據轉速傳感器的信號計算實時行駛里程L(t)。當L(t)小于Lrange時,增程式電動汽車相當于純電動汽車,APU不參與工作;當行駛里程大于Lrange時,APU介入。為滿足不同負荷功率需求,采取多點能量管理策略,其控制邏輯流程如圖3所示。其中SAPU_start為APU開啟時SOC;SAPU_off為APU關閉時SOC值;Sload為功率點切換判定SOC值;車速vhigh和vlow將需求功率分為Plow_load、Pmid_load和Ppeak_load。考慮到城市工況車速和高速工況車速,三個APU工作點如圖2所示,分別為12 kW、18 kW、30 kW。

圖3 APU多點工作模式控制策略流程圖Fig.3 The flow chart of APU multi point working model
2.2 多點控制策略的示例驗證
為了驗證上述所制訂的多點能量管理策略,基于Simulink建立增程式電動汽車仿真模型,采用中國輕型車輛城市工況CUDC來驗證相同工況相同行駛里程(400 km)不同APU啟停控制策略下的能量消耗,其結果如圖4和圖5所示。結果表明,不同的APU啟停策略將會影響增程器的工作方式,進而影響油耗。

圖4 APU啟停方式一的能量消耗Fig.4 Energy consumption of method 1 of APU start-stop
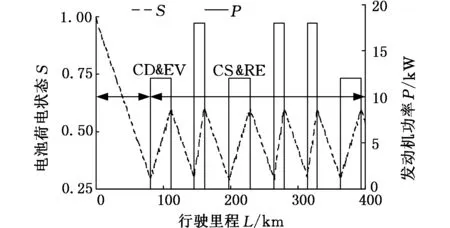
圖5 APU啟停方式二的能量消耗Fig.5 Energy consumption of method 2 of APU start-stop
3 不同里程APU啟停控制優化
由于上述相同里程不同APU啟停方式將影響發動機的工作方式,所以有必要構建APU啟停控制優化模型,尋求特定里程下的最優啟停方式,使得車輛能夠根據續航里程自適應改變APU啟停方式,從而達到節油的目的。
3.1 構建APU啟停控制優化模型
假設電池滿電,不斷改變SAPU_start,固定SAPU_off為0.55,并使基于多點能量管理策略Simulink R-EEV模型在NEDC循環工況下運行200 km,得到燃油消耗和APU啟停次數隨SAPU_start變化情況,以及各負荷點工作時間。
由圖6和圖7可知,隨SAPU_start的增大,APU啟停次數逐漸增大,燃油消耗呈現非線性增加。SAPU_start由0.25增加到0.28過程中,低負荷功率點沒有參與工作,中等負荷工作時間逐漸延長,高負荷功率點工作時間逐漸縮短。由于中等負荷點燃油消耗率最小,高負荷電功率點最高,所以燃油消耗在0.28時達到最小;至0.29時,中等負荷和高負荷都不參與工作,低負荷工作時間大量延長,使得油耗發生突變;達到0.3時,中等負荷參與工作,使得油耗減少;之后油耗呈現不規則周期性變化。

圖6 APU啟停次數和油耗隨SAPU_start變化Fig.6 Change of APU start-stop times and fuel consumption with the change of SAPU_start

圖7 各負荷點工作時間隨SAPU_start變化Fig.7 Change of working time of each load point with the change of SAPU_start
相同電池狀態和行駛里程條件下,固定SAPU_start為0.28,改變SAPU_off得到油耗和啟停次數隨SAPU_off變化情況,以及各個負荷點的工作時間。
由圖8可知,在SAPU_off為0.54和0.8時,油耗相對較低。SAPU_off由0.45增加到0.8過程中,APU啟停次數逐漸減少,油耗呈不規則周期性變化。不同于單點控制策略,APU啟停次數和油耗沒有線性關系。
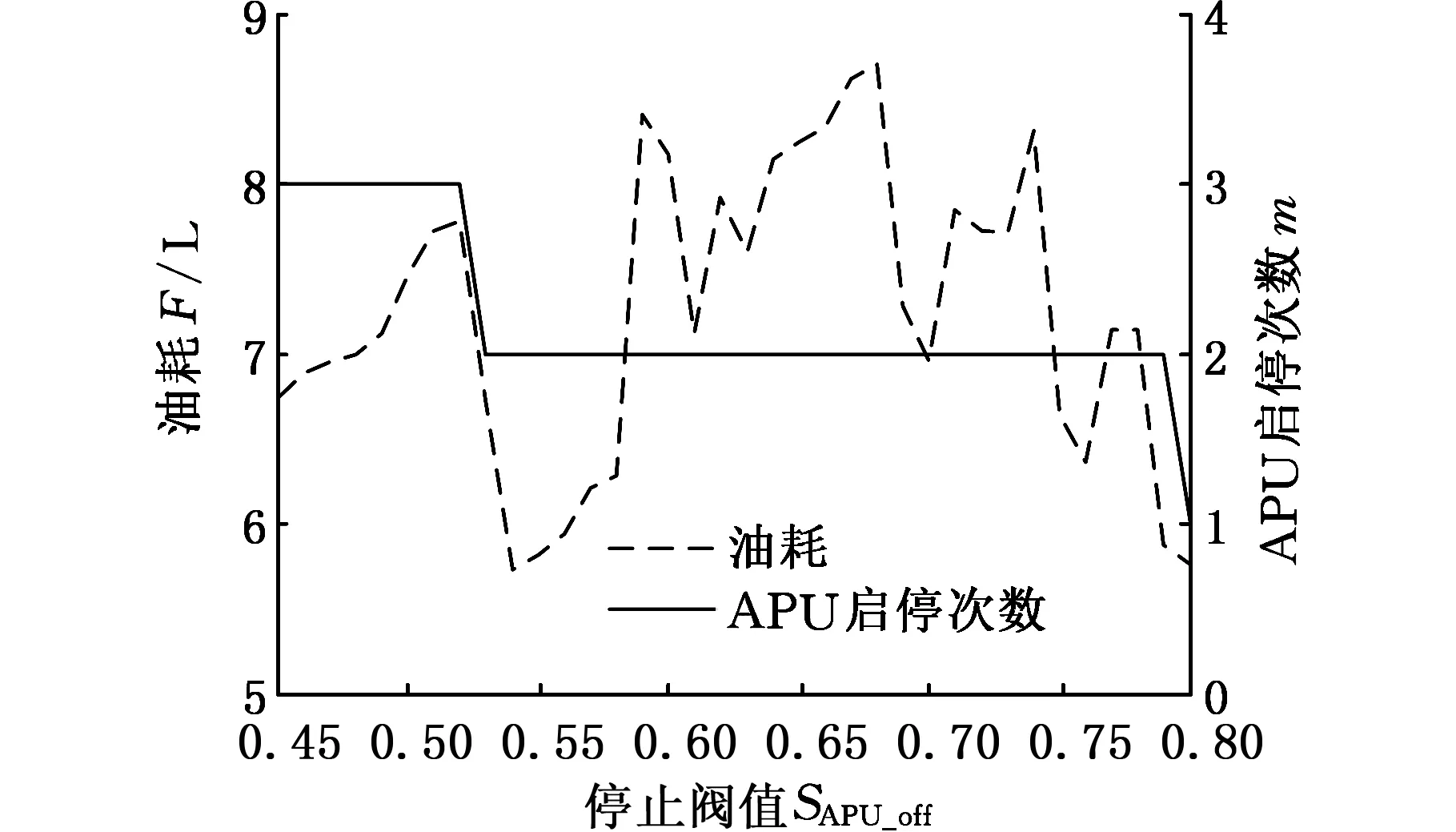
圖8 APU啟停次數和油耗隨SAPU_off變化Fig.8 Change of APU start-stop times and fuel consumption with the change of SAPU_off
綜合圖8和圖9可知,油耗和總的APU工作時間無線性關系。隨SAPU_off變化,三個功率點工作時間此消彼長而導致油耗呈現不規則周期性變化。

圖9 各負荷點工作時間隨SAPU_off變化Fig.9 Change of working time of each load point with the change of SAPU_off
各負荷點固定,其對應的燃油消耗率固定,所以總的燃油消耗是各個負荷點的燃油消耗量對各負荷點工作時間的積分:


(4)
式中,Q1(Ppeak_load)、Q2(Pmid_load)、Q3(Plow_load)為各負荷點的燃油消耗率,L/s;F為總油耗,L。
由于圖7和圖9各負荷點的工作時間都是在特定里程200 km下得到的,故不斷改變行駛里程,將得到不同的各負荷點工作時間隨APU啟停的變化數表,形成四維數表。
APU工作時間tP的計算公式為
(5)
其中,函數g(P,SAPU_start,L)如圖7所示;h(P,SAPU_off,L)如圖9所示。
總油耗F可表示為負荷P、行駛里程L、SAPU_start或SAPU_off的函數:
(6)
3.2 基于PSO不同里程APU啟停控制策略優化
在上述優化模型的基礎上,以油耗最小為目標,使用PSO算法優化APU啟停控制參數。
PSO算法首先在可行域初始化一群粒子,每個粒子具有SAPU_start、SAPU_off兩個維度;每個粒子也具有位置、速度、適應度值三個特征。其演化過程如圖10所示,粒子對其行為(位置和速度)的修正通過綜合考慮其自身因素(慣性或粒子對自身的認同度)、個體最優Pbest,id(認知部分)和全局最優Gbest,id(社會部分)。速度更新公式為
Vid(k+1)=wVid(k)+c1rand(Pbest,id-Xid(k))+
…+c2rand(Gbest,id-Xid(k))
(7)
位置更新公式為
Xid(k+1)=Xid(k)+Vid(k+1)
(8)
式中,Vid(k+1)為第k+1代粒子i的第d維分量的速度;Xid(k+1)為第k+1代粒子i的第d維分量的位置;rand是[0,1]區間的隨機數;c1、c2分別為個體和社會學習因子;w為慣性權重。
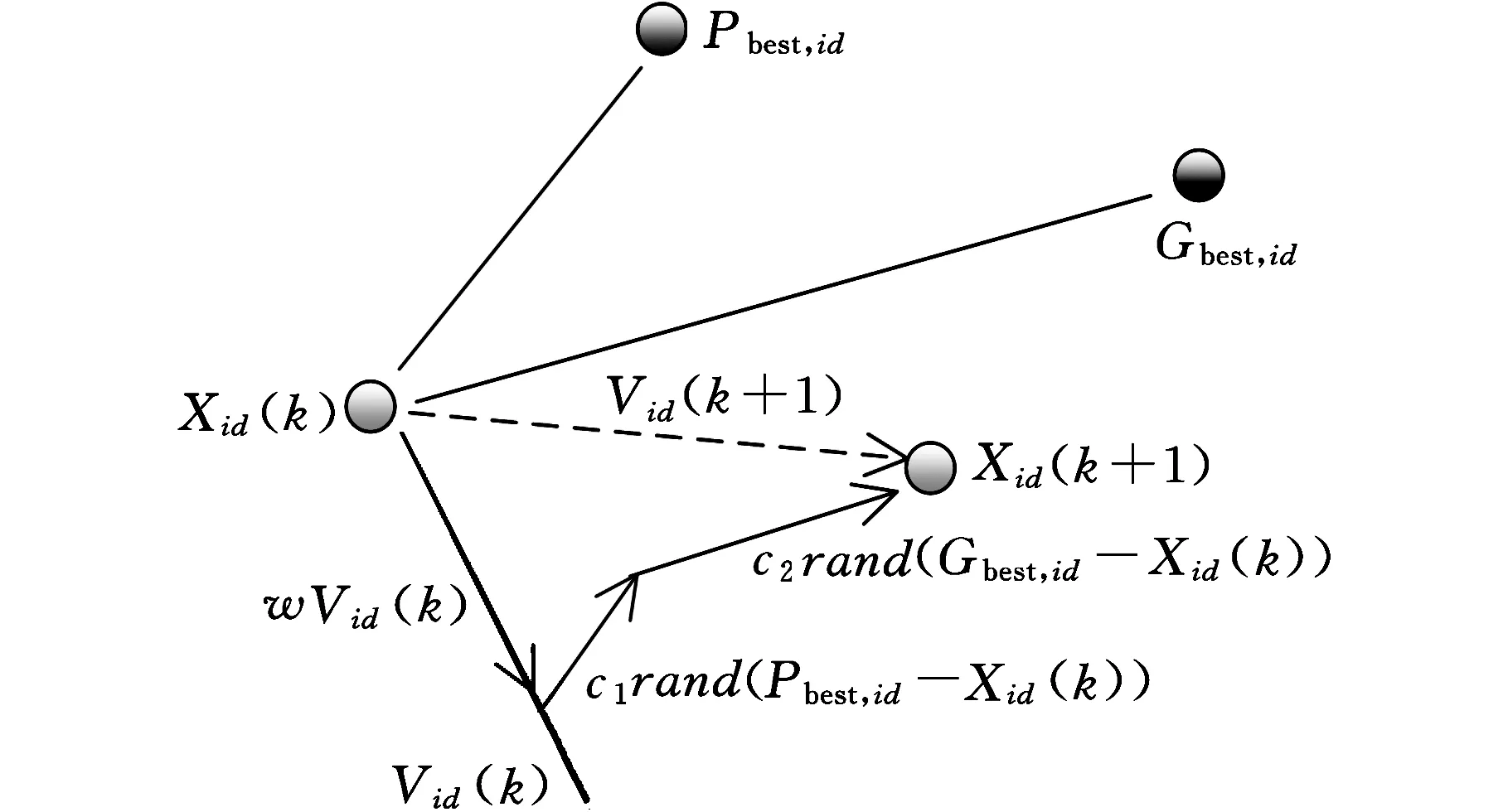
圖10 APU啟停控制參數PSO優化示意Fig.10 Sketch of optimization about parameters of APU start-stop
適應度函數(油耗)通過調用增程式電動汽車Simulink模型來計算,其值的好壞代表粒子優劣。約束條件為性能指標和電池循環壽命。性能指標轉化為電池、電機和APU參數;動力電池的循環壽命和SOC使用范圍息息相關,為了保證電池使用壽命,其工作范圍為0.25~0.8。
VPSO算法設置為:迭代次數30,種群規模30,個體學習因子和社會學習因子c1=c2=1.4,慣性權重w初始值為0.9,隨著粒子的修正,逐漸減為0.5,避免后期陷入局部最優。PSO迭代過程如圖11所示。

(a)100 km行駛里程 (b)200 km行駛里程圖11 PSO迭代過程Fig.11 The iterative process of PSO
4 仿真實驗驗證及結果分析
采用NEDC和CUDC循環工況,分別以100 km和200 km進行驗證,圖12~圖15所示為不同工況不同行駛里程優化前后的能量消耗,圖16所示為優化前后油耗隨里程變化情況,表4為優化前后參數對比。

圖12 CUDC工況100 km優化前后能量消耗Fig.12 Energy consumption before and after optimization in the condition of CUDC 100 km

圖13 CUDC工況200 km優化前后能量消耗Fig.13 Energy consumption before and after optimization in the condition of CUDC 200 km

圖14 NEDC工況100 km優化前后能量消耗Fig.14 Energy consumption before and after optimization in the condition of NEDC 100 km

圖15 NEDC工況200 km優化前后能量消耗Fig.15 Energy consumption before and after optimization in the condition of NEDC 200 km
CUDC工況100 km行駛里程(簡稱CUDC100)優化后,經濟性提升最多,原因在于相比于優化前,提前開啟APU,工作點由原來的低負荷點Plow_load變為Pmid_load中等負荷點,并提早關閉APU,此后APU未再開啟直至里程終結。
CUDC工況200 km行駛里程(簡稱CUDC200)優化后,APU啟停次數減少一次,運行工作點由原來的Ppeak_load、Pmid_load和Plow_load三工作點變為Pmid_load和Plow_load兩工作點,燃油消耗減少14.54%。
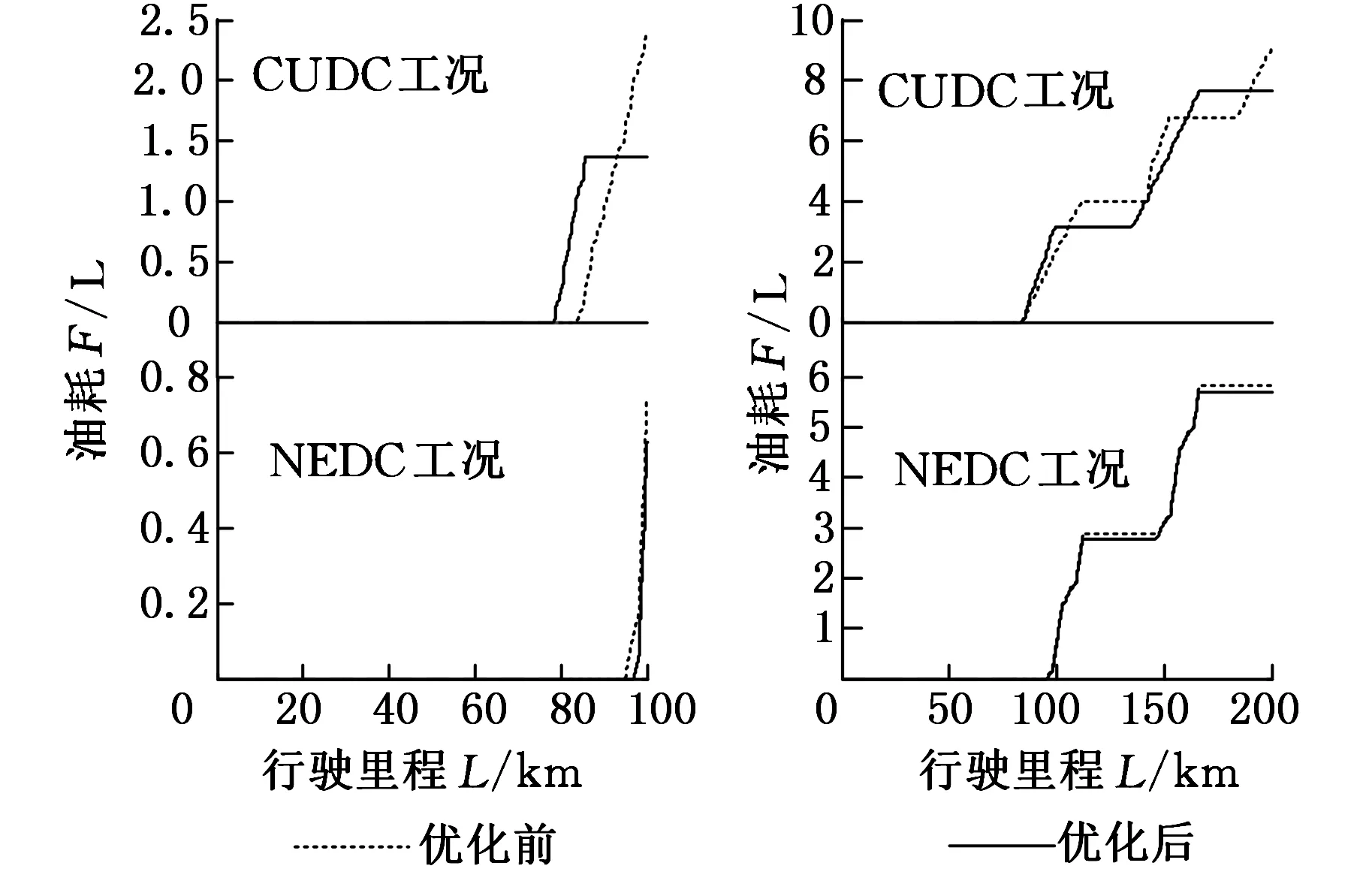
(a)100 km優化前后油耗 (b)200 km優化前后油耗圖16 不同工況不同行駛里程優化前后油耗對比Fig.16 Fuel consumption contrast before and after optimization

表4 優化前后參數對比Tab.4 Parameters contrast before and after optimization
NEDC工況100 km行駛里程(簡稱NEDC100)優化后,油耗減少15.87%,主要原因在于在允許范圍內降低了SAPU_start,使得APU工作于Pmid_load時間縮短。APU延遲關閉不對油耗產生影響,在達到100 km時,優化前后均沒有達到APU關閉閥值。
NEDC工況200 km行駛里程(簡稱NEDC200)優化前后燃油消耗略有減少,主要是初始參數是在此條件下優化得出的。
不同工況相同里程橫向比較得出,盡管里程相同,不同工況將使得燃油消耗差異顯著。100 kmCUDC工況比100 kmNEDC工況燃油消耗增加1.19倍(優化后),200 kmCUDC工況比200 kmNEDC工況增加34.54%(優化后)。
細化行駛里程,得到里程與控制參數對應數表,在已知工況和行駛里程情況下,使得車輛VCU能夠根據續航里程自適應改變控制參數。
5 結論
(1)針對某款增程式電動車,基于APU多點工作模式控制策略,以油耗最小為目標建立優化模型,以性能指標和電池壽命為約束,利用PSO算法對不同工況不同行駛里程下的APU啟停控制參數進行優化,從而實現續航里程自適應APU啟停控制。
(2)仿真實驗結果表明所優化的控制參數效果明顯,與初始參數相比,油耗在工況NEDC100、NEDC200、CUDC100、CUDC200分別減少了15.87%、2.09%、42.24%、14.54%。
(3)對于APU多點工作模式控制策略,油耗與APU總的工作時間和APU啟停次數都無直接線性關系,而與每個工作點的時間都有關系,正是各個工作點的時間的此消彼長使得油耗呈現不規則周期性變化。同里程下減少油耗的方法為:單一負荷下,縮短APU工作時間;不同負荷情況下,延長中低負荷下工作時間,縮短高負荷下工作時間。
[1] RODRIGUES M, KING S, SCOTT D, et al. Advanced Energy Management Strategies for Range Extended Electric Vehicle[J]. SAE International,2015-26-0121.
[2] MILLO F, ROLANDO L, MALLAMO F, et al. Development of an Optimal Strategy for the Energy Management of a Range-extended Electric Vehicle with Additional Noise, Vibration and Harshness Constraints [J]. IMechE,2012,227(1):4-16.
[3] GUO Rong,MI Yi, CAO Chong. Subjective and Objective Evaluation of APU Start-stop NVH for a Range-extended Electric Vehicle[J].SAE International, 2015-01-0047.
[4] LI S G, SHARKH S M, WALSH F C, et al. Energy and Battery Management of a Plug-in Series Hybrid Electric Vehicle Using Fuzzy Logic [J]. IEEE Trans. Veh. Technol., 2011,60:3571-3585.
[5] 牛繼高,周蘇.增程式電動汽車增程器開/關機時刻的優化[J].汽車工程,2013,35(5):418-423. NIU Jigao,ZHOU Su.On/off Timing Optimization for the Range-extender in Extended-Range Electric Vehicles[J]. Automotive Engineering,2013,35(5):418-423.
[6] LI Xianjing,LI Liguang,SUN Yongzheng,et al. Optimization of Control Strategy for Engine Start-stop in a Plug-in Series Hybrid Electric Vehicle [J].SAE International,2010-01-2214.
[7] CHEN B-C, WU Y-Y, TSAI H-C. Design and Analysis of Power Management Strategy for Range Extended Electric Vehicle Using Dynamic Programming [J]. Applied Energy,2014,113:1764-1774.
[8] HOU C, OUYANG M, XU L, et al. Approximate Pontryagin’s Minimum Principle Applied to the Energy Management of Plug-in Hybrid Electric Vehicles [J]. Applied Energy, 2014,115:174-89.
[9] GAO J-P, ZHU G-M,STRANGAS E G, et al. Equivalent Fuel Consumption Optimal Control of a Series Hybrid Electric Vehicle [J]. IMechE,2009,223:1003-1018.
[10] CHEN S-Y, HUNG Y-H, WU C-H, et al. Optimal Energy Management of a Hybrid Electric Powertrain System Using Improved Particle Swarm Optimization [J].Applied Energy,2015,160:132-145.
[11] WU X, CAO B, WEN J. Particle Swarm Optimization for Plugin Hybrid Electric Vehicle Control Strategy Parameter [C]// IEEE Vehicle Power and Propulsion Conference. Harbin,2008:3-5.
[12] WU J, ZHANG C H, CUI N X. PSO Algorithm-based Parameter Optimization for HEV and Its Control Strategy [J]. International Automot Tech., 2008,9(1):53-69.
[13] CHEN Zheng, XIA Bing, YOU Chenwen, et al. A Novel Energy Management Method for Series Plug-in Hybrid Electric Vehicles[J].Applied Energy,2015,145:172-179.
[14] WARREN V, ARUP K R, ROBERT G, et al. Electric Vehicle Range Prediction for Constant Speed Trip Using Multi-objective Optimization[J].Power Sources,2015, 275:435-446.
[15] GREWAL K S, DARNELL P M. Model-based EV Range Prediction for Electric Hybrid Vehicles[C]//Hybrid and Electric Vehicles Conference 2013. London, 2014:1-6.
(編輯 袁興玲)
Optimization of APU Start-stop Control for Diverse Mileage Ranges
LIN Xinyou ZHANG Shaobo FENG Qigao
College of Mechanical Engineering and Automation, Fuzhou University, Fuzhou, 350002
For a range-extended electric vehicle, a multi point energy management strategy was developed to meet different demands of power and energy. Then an optimization model of APU was formulated to achieve the target of minimum fuel consumption. In the constraints of performance index of range-extended electric vehicle and battery cycle life, optimization of control parameters of APU start-stop was performed by the SIMULINK model with diverse mileage ranges under different driving cycles to realize APU start-stop control for adaptive range. Compared with before optimization,the results show that fuel consumption is reduced by 15.87%/2.09%,42.24%/14.54% respectively corresponding to NEDC100/200,CUDC100/200. Based on energy consumption comparisons before and after optimization,the fuel economy may be obtained through reducing APU operation time under the condition of single loads and transferring operation time from peak loads to medium loads and low loads under the condition of multiple loads.
range-extended electric vehicle; mileage range; auxiliary power unit(APU); start-stop control
2015-12-07
國家自然科學基金資助項目(51505086)
U469.72
10.3969/j.issn.1004-132X.2017.01.019
林歆悠,男,1981年生。福州大學機械工程及自動化學院講師、博士。主要研究方向為車輛動力傳動與控制、混合動力電動汽車控制。張少博,男,1989年生。福州大學機械工程及自動化學院碩士研究生。馮其高,男,1989年生。福州大學機械工程及自動化學院碩士研究生。
猜你喜歡
房地產導刊(2022年5期)2022-06-01 06:20:14
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
中學生數理化(高中版.高考數學)(2021年12期)2021-03-08 01:28:50
能源工程(2020年6期)2021-01-26 00:55:22
山東冶金(2019年3期)2019-07-10 00:54:04
消費導刊(2018年10期)2018-08-20 02:57:02
通信電源技術(2016年1期)2016-04-16 04:57:26
電測與儀表(2016年20期)2016-04-11 11:38:24
