井眼軌跡控制工具導(dǎo)向運動控制研究
2017-02-13 00:40:25馮定,盧昌,張紅,3,黃鍇
石油礦場機械 2017年1期
馮 定,盧 昌,張 紅,3,黃 鍇
(1.長江大學(xué) 機械工程學(xué)院,湖北 荊州 434023;2.湖北省油氣鉆完井工具工程技術(shù)研究中心,湖北 荊州 434023;3.水電機械設(shè)備設(shè)計與維護湖北省重點實驗室(三峽大學(xué)),湖北 宜昌 443002)
井眼軌跡控制工具導(dǎo)向運動控制研究
馮 定1,2,盧 昌1,2,張 紅1,2,3,黃 鍇1,2
(1.長江大學(xué) 機械工程學(xué)院,湖北 荊州 434023;2.湖北省油氣鉆完井工具工程技術(shù)研究中心,湖北 荊州 434023;3.水電機械設(shè)備設(shè)計與維護湖北省重點實驗室(三峽大學(xué)),湖北 宜昌 443002)
基于井眼軌跡控制工具的結(jié)構(gòu)特點,建立導(dǎo)向機構(gòu)的數(shù)學(xué)模型,分析了導(dǎo)向過程中偏置機構(gòu)合位移的形成及其分解方法。考慮了工具外套變形對主軸偏置運動的影響,以及不旋轉(zhuǎn)外套發(fā)生微小轉(zhuǎn)動的情況,推導(dǎo)出調(diào)整主軸到目標點的控制方程。根據(jù)內(nèi)外偏心環(huán)初始位置及目標點坐標選擇最優(yōu)路徑,從而使調(diào)整時間最短。利用井眼軌跡控制工具試驗裝置的試驗數(shù)據(jù)得出仿真曲線,驗證了推導(dǎo)方程的正確性。
井眼軌跡;控制工具;偏置機構(gòu);導(dǎo)向控制
旋轉(zhuǎn)導(dǎo)向鉆井技術(shù)是在20世紀80年代末期發(fā)展起來的一項新興鉆井技術(shù),代表了當今世界鉆井技術(shù)的最高發(fā)展階段,是世界各國爭相發(fā)展的全新自動化鉆井新技術(shù)[1-3]。根據(jù)導(dǎo)向方式的不同可分為推靠式和指向式。國外多家公司已擁有各自成熟的產(chǎn)品,國內(nèi)對指向式井眼軌跡控制工具的研究還不夠完善,存在較多技術(shù)難題[4-9]。本文根據(jù)井眼軌跡控制工具導(dǎo)向原理,綜合考慮不旋轉(zhuǎn)外套變形對偏置芯軸運動的影響,分析了導(dǎo)向過程中主軸運動情況。
1 井眼軌跡控制工具導(dǎo)向機構(gòu)及其原理
井眼軌跡控制工具通過偏置機構(gòu)對井眼軌跡進行精確導(dǎo)向控制[10]。偏置機構(gòu)主要由內(nèi)外2個偏心環(huán)組成。內(nèi)環(huán)嵌于外環(huán)里面,同時主軸嵌在內(nèi)環(huán)里面。內(nèi)外偏心環(huán)具有相同的偏心距,通過調(diào)整內(nèi)外偏心環(huán)的位置可以實現(xiàn)增斜、穩(wěn)斜和降斜的目的。外環(huán)與內(nèi)環(huán)之間、內(nèi)環(huán)與主軸之間裝有滾動軸承。偏置機構(gòu)結(jié)構(gòu)如圖1所示。

圖1 偏置機構(gòu)示意
井眼軌跡控制工具接收導(dǎo)向指令后,將鉆桿動力通過主軸聯(lián)軸器、電磁離合器及減速器傳遞給偏置機構(gòu),控制單元通過控制電磁離合器的吸合實現(xiàn)內(nèi)外偏心環(huán)的相對轉(zhuǎn)動,從而實現(xiàn)主軸任意角度的彎曲,使鉆頭達到所設(shè)定的偏轉(zhuǎn)角和方位角。導(dǎo)向控制工作原理如圖2所示。
圖2 井眼軌跡控制工具原理
2 偏置機構(gòu)導(dǎo)向芯軸偏心位移矢量控制
在井眼軌跡控制工具的偏置機構(gòu)中,改變內(nèi)外環(huán)各自的旋轉(zhuǎn)角度,形成一個大小和方向都可控的偏心合位移矢量,從而控制鉆井工具的工具面角和偏轉(zhuǎn)角。在作業(yè)過程中,根據(jù)所需造斜率確定對應(yīng)的偏心位移矢量,再將其分解為內(nèi)外偏心環(huán)對應(yīng)的旋轉(zhuǎn)角度。由于工具外殼與主軸會產(chǎn)生相互作用,導(dǎo)致實際偏轉(zhuǎn)角與理論偏轉(zhuǎn)角有所偏差,摩擦力的存在會使得工具外殼產(chǎn)生一定的旋轉(zhuǎn)角度,影響工具面角的設(shè)定。
2.1 偏置機構(gòu)偏心矢量合成
以導(dǎo)向執(zhí)行機構(gòu)中心軸線與控制平面的交點為原點,建立主軸偏心位移示意圖,如圖3所示。
圖3 主軸偏心位移示意

(1)
分解矢量到x軸和y軸得:
ex=ecosα=e1cosα1+e2cosα2
(2)
ey=esinα=e1sinα1+e2sinα2
(3)
即:
(4)
計算得出:
(5)
偏置機構(gòu)的動力來源于主軸,由聯(lián)軸器將鉆桿的旋轉(zhuǎn)運動通過電磁離合器傳遞給減速裝置,再經(jīng)過減速裝置作用在內(nèi)外偏心環(huán)上。為保證偏心環(huán)旋轉(zhuǎn)角的控制精度,應(yīng)控制其角速度ω在2π rad/min以內(nèi)。
在初始狀態(tài)下,當內(nèi)環(huán)保持不動,單獨旋轉(zhuǎn)外偏心環(huán),經(jīng)過t1時間后旋轉(zhuǎn)角度為α1=ωt1,代入式(2)~(3)得主軸偏心位移矢量,分解到x軸和y軸分別為:
ex=ecosα=e1cos(ωt1)-e2
(6)
ey=esinα=e1sin(ωt1)
(7)
計算得出:
(8)
當外環(huán)保持不動,單獨旋轉(zhuǎn)內(nèi)偏心環(huán),經(jīng)過t2時間后旋轉(zhuǎn)角度為180°+ωt2,代入式(2)~(3)得主軸偏心位移矢量,分解到x軸和y軸分別為:
ex=ecosα=e1-e2cos(ωt2)
(9)
ey=esinα=e2sin(ωt2)
(10)
計算得出:
(11)
在導(dǎo)向過程中,通過傳感器實時檢測內(nèi)外偏心環(huán)的旋轉(zhuǎn)角度,經(jīng)過換算獲得主軸的位移矢量并與預(yù)設(shè)定值比較,出現(xiàn)偏差則進行動態(tài)調(diào)整。
2.2 偏置機構(gòu)偏心矢量分解
在鉆井過程中,計算機會根據(jù)所設(shè)定的造斜率來得出偏心位移合矢量,然后轉(zhuǎn)化為內(nèi)外偏心環(huán)的旋轉(zhuǎn)角度。確定內(nèi)外偏心環(huán)的旋轉(zhuǎn)角度后,工具就能按照對應(yīng)造斜率鉆進。但在偏心環(huán)偏置過程中,主軸產(chǎn)生彎曲變形的同時,工具外殼也會產(chǎn)生相對應(yīng)的變形。因此在設(shè)定偏心位移合矢量時需要考慮工具外殼變形所抵消掉的部分位移。
圖4為本工具簡化后的模型示意圖,偏心環(huán)在給主軸施加偏置力F的同時會對工具外殼產(chǎn)生一個反向的偏置力F。

圖4 簡化模型示意
圖4中:L1為下軸承到偏心環(huán)的距離,mm;L2為上軸承到偏心環(huán)的距離,mm;L為兩軸承之間的距離,L=L1+L2,mm;θ1、θ2為鉆頭軸線與工具軸線的夾角,(°);θ3、θ4為工具外殼與工具軸線的夾角,(°)。
模型可看成簡支梁變形問題,則主軸在偏心環(huán)處所產(chǎn)生的撓度ωB為:
(12)
根據(jù)疊加原理可以得:
e=ωA+ωB
(13)
通過給定的造斜率計算得出鉆頭偏轉(zhuǎn)角。在已知的情況下,偏置力F的計算公式為[11]:
(14)
在偏置力F的作用下,工具外殼產(chǎn)生的撓度ωA為:
一時間,苞米、葵花盤長了翅膀似的飛向徐進步,徐進步顧上顧不了下,狼狽地躥到了幾個籮筐后面。無辜挨打的男知青們也跟著東躲西藏。
(15)
轉(zhuǎn)角θ4與θ2之間存在如下關(guān)系式:
(16)
代入式(15)可得:
(17)
根據(jù)式(12) ~(13)和(17)可得實際偏心位移合矢量模值e′為:
(18)
上述各式中:F為偏置力,kN;E1為工具外殼彈性模量,Pa;I1為工具外殼橫截面慣性矩,mm4;E2為主軸彈性模量,Pa;I2為主軸橫截面慣性矩,mm4。
通過給定的造斜率計算得出θ,代入式(18)可得到需要設(shè)定的偏心位移合矢量模值e′。
(19)
3 內(nèi)外環(huán)運動軌跡優(yōu)選
圖5 為內(nèi)外環(huán)中心運動軌跡示意圖,A為偏置機構(gòu)中心位置,B′為外環(huán)內(nèi)孔中心,C′為主軸中心實際位置,可由傳感器測得其坐標。假設(shè)C點為主軸中心運動目標點,則外環(huán)中心運動到B或者D兩點時,再轉(zhuǎn)動內(nèi)環(huán),都可以使主軸中心到達C點。
圖5 偏心環(huán)中心運動軌跡示意
偏心環(huán)按順時針方向旋轉(zhuǎn),則內(nèi)外環(huán)需要旋轉(zhuǎn)角度分別為:
(20)
或者
(21)
式中:θAB′為內(nèi)偏心環(huán)偏移方向與x軸正方向夾角;θBC′為外偏心環(huán)偏移方向與x軸正方向夾角;θ為偏心合位移矢量與x軸正方向夾角;ec為偏心合位移模值;θ0為工具外殼實際旋轉(zhuǎn)角度,順時針方向為正。
由于內(nèi)外環(huán)旋轉(zhuǎn)角速度相同,根據(jù)式(20)~(21),排除θ5~θ8中最大值,則另外一組解為調(diào)整的最佳方案。
4 主軸偏置運動試驗
井眼軌跡控制工具試驗裝置主軸外徑D=70 mm,內(nèi)徑d=40 mm;偏置機構(gòu)內(nèi)外偏心環(huán)的偏心距e均為3 mm。設(shè)定主軸轉(zhuǎn)速為最大值200 r/min,模擬偏置機構(gòu)從初始狀態(tài)調(diào)整到偏心合位移轉(zhuǎn)角為60°,偏移量為6 mm。圖6為此工況下主軸動位移曲線,在5 s時開始調(diào)整偏心環(huán)位置,在5~15 s先由內(nèi)外偏心環(huán)共同旋轉(zhuǎn)60°,故此刻偏心合位移仍為0。在15~45 s,內(nèi)偏心環(huán)開始調(diào)整旋轉(zhuǎn)角度,此時偏心合位移開始有變化,直至偏心合位移達到最大值。45 s以后工具穩(wěn)定造斜。

圖6 α=60°主軸動位移曲線
模擬偏置機構(gòu)從初始狀態(tài)調(diào)整到偏心合位移轉(zhuǎn)角為90°,偏移量為3 mm時的狀態(tài)。圖7為此工況下主軸動位移曲線,在5 s時開始調(diào)整偏心環(huán)位置,在5~10 s先由內(nèi)外偏心環(huán)共同旋轉(zhuǎn)60°,此刻偏心合位移仍為0。在10~60 s,內(nèi)偏心環(huán)開始調(diào)整旋轉(zhuǎn)角度,此時偏心合位移開始有變化,在40 s時工具達到最大偏心位置,隨后偏心距開始減小。60 s時,合位移偏心距達到3 mm,偏移方向達到90°,故x方向位移變?yōu)?。此后工具達到穩(wěn)定狀態(tài),開始造斜。

圖7 α=90°主軸動位移曲線
當不旋轉(zhuǎn)外套發(fā)生轉(zhuǎn)動,或者需要調(diào)整造斜率時,控制系統(tǒng)需要根據(jù)當前外偏心環(huán)內(nèi)孔中心點坐標、當前主軸中心點坐標和主軸中心目標點坐標來選擇最優(yōu)運動軌跡。現(xiàn)模擬系統(tǒng)從α=60°,偏移量為6 mm的工況一開始調(diào)整至α=90°,偏移量為3 mm的工況二的過程。
如圖8所示,偏置機構(gòu)從5 s開始調(diào)整,在5~20 s,外偏心環(huán)開始調(diào)整角度,此時內(nèi)外偏心環(huán)整體運動,故偏心合位移始終保持為6 mm。在20~60 s為內(nèi)偏心環(huán)角度調(diào)整過程,其中在50 s處主軸中心經(jīng)過工具軸線中心,偏心合位移為0。60 s時達到預(yù)定狀態(tài),工具保持穩(wěn)定狀態(tài)造斜。
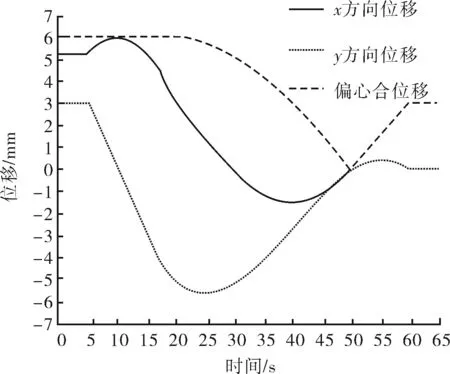
圖8 主軸調(diào)整過程動位移曲線
5 結(jié)論
1) 井眼軌跡控制工具主要由2個偏心距相同的內(nèi)外偏心環(huán)共同作用于主軸,達到造斜目的。推導(dǎo)了偏心合位移矢量與偏心環(huán)旋轉(zhuǎn)角度之間的關(guān)系。
2) 考慮了導(dǎo)向過程中工具外殼的變形對偏心合位移的影響,得出實際偏移量與理論偏移量的轉(zhuǎn)換方程。
3) 針對內(nèi)外環(huán)運動軌跡提出了最優(yōu)路徑選擇方法,縮短了工具導(dǎo)向調(diào)整時間。
4) 根據(jù)試驗裝置具體參數(shù)模擬了主軸偏置過程運動軌跡,驗證了推導(dǎo)公式的正確性。
[1] 趙金海,唐代緒,朱全塔,等.國外典型的旋轉(zhuǎn)導(dǎo)向鉆井系統(tǒng)[J].國外油田工程,2002,18(11):33-36.
[2] 王鵬,盛利民,竇修榮,等.國外旋轉(zhuǎn)導(dǎo)向最新技術(shù)進展與發(fā)展趨勢[J].鉆采工藝,2013,36(6):32-35.
[3] 李漢興,姜偉,蔣世全,等.可控偏心器旋轉(zhuǎn)導(dǎo)向鉆井工具偏心位移控制分析[J].中國海上油氣,2008,20(3):183-187.
[4] 馮定,袁詠心,李漢興,等.井眼軌跡控制工具發(fā)展現(xiàn)狀及趨勢[J].石油機械,2011,39(3):70-73.
[5] Stuart Schaaf,Schlumberger,Mallary C R,et al.Pointthe-Bit Rotary Steerable System:Theory and Field Results[R].SPE 63247,2000.
[6] Christopher Jeffery,Michael Coss,Richard Rivera,et al.Pivot Stabilizer Innovations for Point the Bit Rotary Steerable Systems Result in Improved Drilling Performance for Specific Applications[R].SPE 163529.
[7] 張紅,羅權(quán),夏成宇,等.井眼軌跡控制工具內(nèi)偏心環(huán)嚙合與運動軌跡模擬[J].石油機械,2014,42(7):12-15.
[8] 李士斌,王業(yè)強,張立剛,等.靜態(tài)推靠式旋轉(zhuǎn)導(dǎo)向控制方案分析及優(yōu)化[J].石油鉆采工藝,2015,37(4):12-15.
[9] 趙金洲,孫銘新.旋轉(zhuǎn)導(dǎo)向鉆井系統(tǒng)的工作方式分析[J].石油機械,2004,32(6):73-75.
[10] 馮定,羅權(quán),張紅,等.井眼軌跡控制工具滾針軸承的偏載失效分析[J].石油機械,2015,43(4):10-13.
[11] 馮定,肖蘇宸,夏成宇,等.高造斜井眼控制工具主軸力學(xué)分析與試驗研究[J].石油機械,2014,42(10):34-36.
Research on Control of Steering Movement of Well Trajectory Control Tool
FENG Ding1,2,LU Chang1,2,ZHANG Hong1,2,3,HUANG Kai1,2
(1.SchoolofMechanicalEngineering,YangtzeUniversity,Jingzhou434023,China;2 .OilandGasDrillingandWellCompletionToolsResearchCenter,Jingzhou434023,China;3.HubeiKeyLaboratoryofHydroelectricMachineryDesign&Maintenance,ChinaThreeGorgesUniversity,Yichang443002,China)
The mathematical model of steering mechanism was established and the formation and decomposition method of bias units in the steering process base on the structure characteristics of well trajectory control tool were analyzed.A control equation of the spindle to the target point is derived with considering the influence of the deformation of the shell on the spindle and the small rotation of nor-rotation shell.According to the initial position of the inner and outer eccentric straps and the coordinate of the target point the optimal path is selected to make the shortest adjusting time.To demonstrate the correctness of the equation,the simulation curves are presented by using the experimental data of the well trajectory control tool experiment device.
well trajectory;control tool;bias units;steering movement control
1001-3482(2017)01-0006-05
2016-08-05
國家自然科學(xué)基金項目“高造斜率井眼軌跡控制工具主軸井下力學(xué)行為研究”(51275057);湖北省教育廳科學(xué)研究計劃中青年人才項目(Q20151301);水電機械設(shè)備設(shè)計與維護湖北省重點試驗室開放基金項目(2016KJX12)聯(lián)合資助
馮 定(1963-),男,教授,博士生導(dǎo)師,主要從事石油機械及井下工具的設(shè)計、診斷及動態(tài)仿真的技術(shù)研究,E-mail:fengd0861@163.com。
TE921.201
A
10.3969/j.issn.1001-3482.2017.01.002