鉆機二層臺排送管機械手剛柔耦合動力學仿真分析
2017-02-13 00:40:29胡送橋唐清亮陳明凱祝克強
石油礦場機械 2017年1期
關鍵詞:方向
胡送橋,唐清亮,陳明凱,祝克強
(三一集團有限公司 湖南分公司,長沙 410100)
鉆機二層臺排送管機械手剛柔耦合動力學仿真分析
胡送橋,唐清亮,陳明凱,祝克強
(三一集團有限公司 湖南分公司,長沙 410100)
運用仿真軟件Hypermesh及ADAMS建立鉆機二層臺排送管機械手剛柔耦合模型,模擬機械手夾持管具從收縮狀態到井口中心位置的送管過程。對比分析機械手臂架純剛體、剛柔耦合兩種狀態和不同臂架驅動速度下機械手末端抓手各方向的位移和位移偏差。為機械手臂架驅動系統的設計選型、臂架的結構設計等提供理論數據支撐,縮短了產品設計開發周期。
鉆機;排送管機械手;剛柔耦合;動力學分析
為了提升鉆機的鉆井作業工作效率,節約人工成本,提高作業工人的安全性,油田及鉆井承包商對鉆機二層臺排送管機械手的需求日益迫切。國外主流鉆機制造商,例如NOV公司等早已推出自動排送管機械手產品并投入應用。國內鉆機制造商也先后進行了類似產品的研發,但國內市場尚未有成熟可靠的鉆機二層臺排送管機械手產品投入使用[1-3]。針對鉆井作業的工藝特點和使用要求,設計開發了一套可用于鉆井作業的鉆機二層臺排送管機械手。考慮機械手臂架的柔性特性,通過ADAMS軟件建立了剛柔耦合模型,模擬了機械手夾持管具從收縮狀態到井口中心位置的送管過程。對比分析了機械手臂架純剛體、剛柔耦合兩種狀態和不同臂架驅動速度下機械手末端抓手各方向的位移和位移偏差,為機械手臂架驅動系統的設計選型、臂架的結構設計等提供理論依據[4-5]。
1 機械手主要結構及工作原理
鉆機二層臺排送管機械手由二層臺、猴道和機械手總成等組成,如圖1所示,其中機械手總成通過平移小車固定在二層臺猴道下方。
機械手總成由抓手、臂架Ⅰ、臂架Ⅱ、臂架Ⅲ、臂架Ⅳ、連接架、連桿、轉臺及平移小車等組成,如圖2所示。工作原理如下:平移小車通過電機驅動實現機械手沿猴道的往復直線運動;平移小車下方安裝轉臺,轉臺通過電機驅動實現機械手的往復回轉運動;臂架Ⅰ、臂架Ⅱ、臂架Ⅲ、臂架Ⅳ、連桿、轉臺、連接架和抓手組成兩套平行四邊形結構,臂架Ⅳ通過電機驅動實現旋轉運動,實現機械手總成末端抓手的伸展和收縮運動,雙平行四邊形結構可保證末端抓手在伸展和收縮運動時始終保持水平狀態。
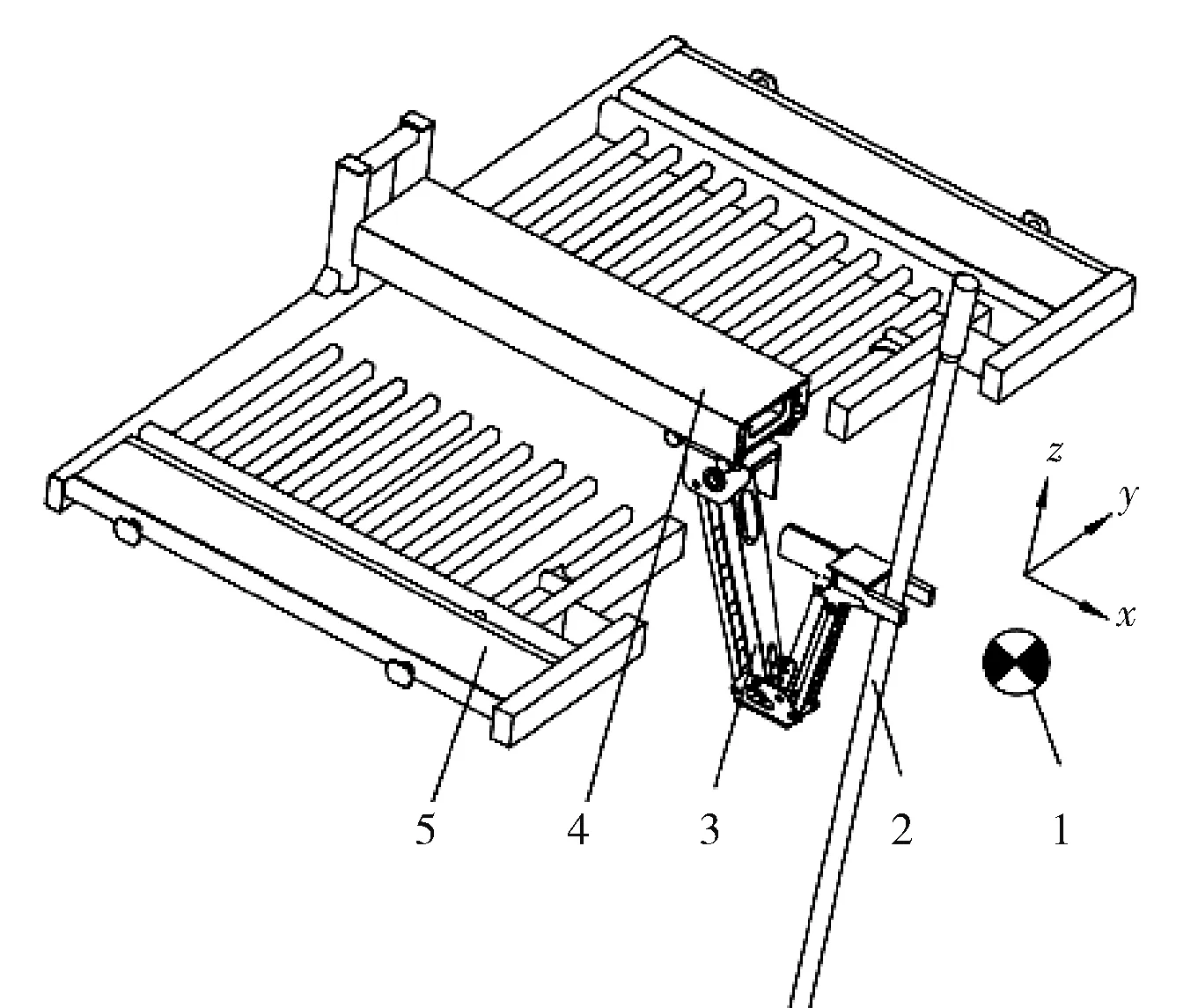
1—井口中心位置;2—管具;3—機械手總成;4—猴道;5—二層臺。
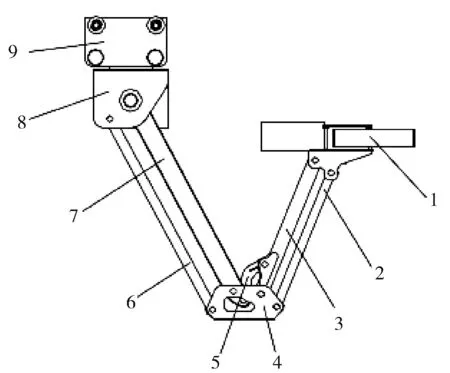
1—抓手;2—臂架Ⅰ;3—臂架Ⅱ;4—連接架;5—連桿;6—臂架Ⅲ;7—臂架Ⅳ;8—轉臺;9—平移小車。
2 機械手剛柔耦合分析
采用三維建模軟件Pro/E對鉆機二層臺排送管機械手關鍵零部件進行簡化,建立機械手的三維模型,另存為Parasolid(.x_t)格式,導入ADMAS軟件中。對機械手的4個臂架進行柔性化處理,臂架柔性化處理的過程如下:將4個臂架分別導入Hypermesh中,抽中面后劃分網格,定義材料彈性模量2.1×105MPa,泊松比0.3,密度7.9 t/m3,在臂架的各鉸點位置建立關鍵點,采用PSHELL殼單元劃分網格并賦厚度和材料屬性,關鍵點和周邊孔面節點之間用剛性區域連接[6],此外,建立包括CMSMETH、ASET的載荷集和包括Global_case_contral、Output、Dti_units、Gpstress的控制卡片,利用Hypermesh與ADAMS的接口導出柔性體的模態中性文件(MNF文件),導出MNF文件前要注意單位的換算[7-8];將MNF文件導入ADAMS中替代之前的純剛體臂架,并通過查看導入的柔性體質量信息、模態固有頻率和振型核對MNF文件[9-10],完成后的剛柔耦合模型如圖3所示。

圖3 鉆機二層臺排送管機械手剛柔耦合模型
在純剛體和剛柔耦合模型中,各自定義各鉸點鉸接關系和臂架驅動電機,通過ADAMS模擬機械手送管時機械手夾持管具從收縮狀態到井口中心位置這一運動過程,具體參數設置如下:臂架驅動電機采用STEP函數驅動,分別模擬電機驅動在6、8 和10 (°)/s 3種速度狀態,機械手臂架最大伸展角度為40°,仿真結束后提取機械手末端抓手前后(沿x軸)、左右(沿y軸)和垂直(沿z軸)方向的位移和位移偏差曲線。以下篇幅中純剛體狀態簡稱剛體狀態,剛柔耦合狀態簡稱柔體狀態。
函數定義為STEP(time,0.1,0d,0.6,8d)+STEP(time,4.5,0d,5,-8d)時,模擬電機驅動為8 (°)/s的速度狀態,提取機械手末端抓手各方向位移和位移偏差曲線,如圖4~9。
根據上述曲線分析可知,柔體狀態下機械手末端抓手存在振動現象,同實際情況相符,振動幅度在前后方向上相對剛體狀態最大偏差為13 mm,左右方向上相對剛體狀態最大偏差為7 mm,垂直方向上相對剛體狀態最大偏差4.7 mm,且各方向位移偏差隨臂架向井口方向伸展時有逐步增大的趨勢。

圖4 機械手末端抓手前后方向位移對比

圖5 機械手末端抓手前后方向位移偏差

圖6 機械手末端抓手左右方向位移對比

圖7 機械手末端抓手左右方向位移偏差

圖8 機械手末端抓手垂直方向位移對比

圖9 機械手末端抓手垂直方向位移偏差
限于篇幅長度限制,函數定義為STEP(time,0.1,0d,0.6,6d)+STEP(time,6.2,0d,6.7,-6d)和STEP(time,0.1,0d,0.6,10d)+STEP(time,3.5,0d,4,-10d)時,模擬電機驅動為6 (°)/s和10 (°)/s 2種速度狀態,提取的機械手末端抓手各方向的位移和位移偏差曲線不單獨列出,2種速度狀態下的位移曲線與上述曲線趨勢基本一致,各方向位移偏差與上述位移偏差對比如表1所示。

表1 3種速度狀態下各方向位移偏差對比
由表1可知,不同電機驅動速度對機械手末端抓手的前后、左右和垂直方向位移偏差有較大影響:因機械手臂架結構本身剛度的不足,上述3種速度狀態下機械手末端抓手各方向均存在位移偏差,但在速度Ⅰ、速度Ⅱ狀態下其偏差變化不大;當增大至速度Ⅲ狀態時,機械手末端抓手的各方向位移偏差有明顯增大趨勢。因此,設計時除考慮臂架本身結構剛度對末端抓手位移偏差的影響外,還應綜合考慮臂架驅動速度對位移偏差的影響,避免機械手末端抓手出現較大的振動,從而影響機械手末端抓手的定位精度。
3 結論
1) 運用Hypermesh和ADAMS軟件建立了鉆機二層臺排送管機械手的剛柔耦合模型,并仿真模擬了機械手夾持管具從收縮狀態到井口中心位置的送管過程。
2) 對比了機械手臂架純剛體、剛柔耦合2種狀態下機械手末端抓手各方向的位移及位移偏差數據,結果表明臂架柔性體結構更加符合機械手的實際工況,其末端抓手存在明顯振動。
3) 對比了3種速度狀態下機械手末端抓手的位移偏差數據,結果表明末端抓手各方向位移偏差受到臂架本身結構剛度和驅動速度的綜合影響。
[1] 童征,鄭立臣,牛海峰,等.陸地鉆機用二層臺管具排放系統設計[J].石油機械,2011,39(8):27-29.
[2] 何鴻.鉆井平臺鉆桿自動化排放系統方案設計[J].石油礦場機械,2012,41(9):82-84.
[3] 張洪生,楊帆,姚璐璐,等.陸地鉆機桅桿式鉆桿自動排放系統研究[J].機械制造,2012(2):43-44.
[4] 熊楚良,黃松和,朱鵬飛.碼垛機器人剛柔耦合動力學仿真分析[J].包裝工程,2015,10(19):84-88.
[5] 王江勇,王基生,張俊俊,等.單自由度柔性機械臂剛柔耦合動力學仿真研究[J].機械設計與制造,2012(12):54-56.
[6] 李楚琳,張勝蘭,馮櫻,等.HyperWorks分析應用實例[M].北京:機械工業出版社,2008.
[7] 馬魯凱.考慮車架柔性的載貨車操穩性和平順性研究[D].長沙:湖南大學,2013:12-13.
[8] 王鑫.車架柔性對重型載貨汽車操縱穩定性、平順性影響的仿真分析[D].長春:吉林大學,2012:15-26.
[9] 李增剛.ADAMS入門詳解與實例[M].北京:國防工業出版社,2016.
[10] 趙武云,劉艷妍,吳建民,等.ADAMS基礎與應用實例教程[M].北京:清華大學出版社,2012.
Rigid-flexible Coupling Dynamics Simulation Analysis of Drill Rig Monkey-Board Pipe-handling Manipulator
HU Songqiao,TANG Qingliang,CHEN Mingkai,ZHU Keqiang
(SanyHeavyIndustryCo.,Ltd.,Changsha410100,China)
In order to achieve unmanned pipe-handling of monkey-board,drill rig monkey-board pipe-handling manipulator aims to replace derrickmen that handle pipes high-effectively.In this paper,the simulation analysis software Hypermesh and Adams were used to establish the model of rigid-flexible coupling dynamics simulation analysis and simulate the process of pipe-handling,and analyzed the displacement and the deviation in three directions under the states of rigid & rigid-flexible coupling and three driving velocity of manipulator arm,which provided reliable data to support structure improvement and driving system design and shorten the design cycle.
drilling rig;pipe-handling manipulator;rigid-flexible coupling;dynamics analysis
1001-3482(2017)01-0034-04
2016-08-19
胡送橋(1984-),男,湖南婁底人,碩士研究生,主要研究方向為石油鉆修井井口自動化機械,Email:husq898@163.com。
TE928
A
10.3969/j.issn.1001-3482.2017.01.008
猜你喜歡
計算機應用(2023年1期)2023-02-03 03:09:28
音樂天地(音樂創作版)(2022年10期)2023-01-13 05:47:42
湘潮(上半月)(2022年5期)2022-12-06 03:02:28
計算機應用(2022年2期)2022-03-01 12:33:42
計算機應用(2022年1期)2022-02-26 06:57:42
計算機應用(2021年4期)2021-04-20 14:06:36
數學小靈通(1-2年級)(2021年3期)2021-04-13 01:01:58
計算機應用(2021年3期)2021-03-18 13:44:48
計算機應用(2021年1期)2021-01-21 03:22:38
數學小靈通·3-4年級(2017年11期)2017-11-29 01:35:50