基于高增益觀測器的四旋翼無人機軌跡跟蹤控制
2017-02-15 02:57:51王銳劉金琨
飛行力學 2017年1期
關鍵詞:設計
王銳, 劉金琨
(北京航空航天大學 自動化科學與電氣工程學院, 北京 100191)
基于高增益觀測器的四旋翼無人機軌跡跟蹤控制
王銳, 劉金琨
(北京航空航天大學 自動化科學與電氣工程學院, 北京 100191)
為了實現四旋翼無人機對給定姿態的快速跟蹤,基于Terminal滑模控制方法設計了一種四旋翼無人機的姿態控制器,在設計滑模面時引入非線性函數來保證跟蹤誤差在有限時間內收斂。考慮在線速度未知的情況下,通過設計高增益觀測器來對無人機速度進行觀測,并利用所觀測的信號設計位置控制器。最后利用Lyapunov理論證明了系統的穩定性。仿真結果表明,四旋翼無人機在線速度不可測的情況下,仍可進行軌跡跟蹤控制。
四旋翼無人機; 高增益觀測器; Terminal滑模; 線速度反饋
0 引言
四旋翼無人機(Quadrotor UAV)具有結構簡單、機動性強、安全可靠等優點,因此越來越多地被用來執行低空偵察、搶險救災、航空攝影等任務[1]。四旋翼無人機具有4個控制輸入和6個狀態變量,是一個典型的欠驅動系統,這使得四旋翼無人機的控制問題具有一定的難度。許多文獻研究了四旋翼無人機的控制問題,并提出了多種先進的控制算法,如滑模控制[2-3]、反饋線性化[4]、自適應控制[5]、模型預測控制[6]以及奇異攝動理論[7]等。文獻[2]將四旋翼無人機的模型以狀態空間的形式表示,采用內外環方法設計控制律,設計了滑模控制器。文獻[5]利用內外環結構,對外回路設計了基于反步法的控制器,內回路引入了L1自適應控制對系統進行補償。文獻[6]設計了一種H∞控制器來追蹤理想角度,基于模型預測控制理論設計了位置控制器。上述文獻大多采用了內外環結構實現四旋翼無人機的控制器設計:先對四旋翼無人機的位置控制器進行設計,通過位置控制器得到理想姿態以及實際升力,最后設計姿態控制器來跟蹤理想姿態。這就要求姿態控制器能夠迅速跟蹤姿態指令,因此,姿態控制器的性能決定了四旋翼無人機系統的整體性能。文獻[7]利用奇異攝動理論,定量分析了內外環之間的增益關系,指出姿態收斂需要高的增益才能保證快速性,并給出了高增益參數的范圍。
現有的大部分方法僅能夠保證系統狀態的漸進收斂。實際工程應用中,人們更需要系統在有限時間內收斂;然而在傳統的滑模控制中,狀態跟蹤誤差不會在有限時間內收斂到零。此外,無人機在低速飛行時,平動線速度可以根據GPS傳感器的測量信號近似差分得到。但是,當四旋翼無人機位于室內或者橋梁下方,由于信號衰減或者阻塞,可能會導致GPS傳感器失效。此時位置信號可以借助高度計和攝像頭傳感器得到,但是線性度不可測,平動線速度信息無法獲得。為了獲得更好的控制效果,本文考慮平動線速度不可測情況下的四旋翼無人機軌跡跟蹤控制。
1 四旋翼無人機動力學模型
四旋翼無人機的結構如圖1所示。
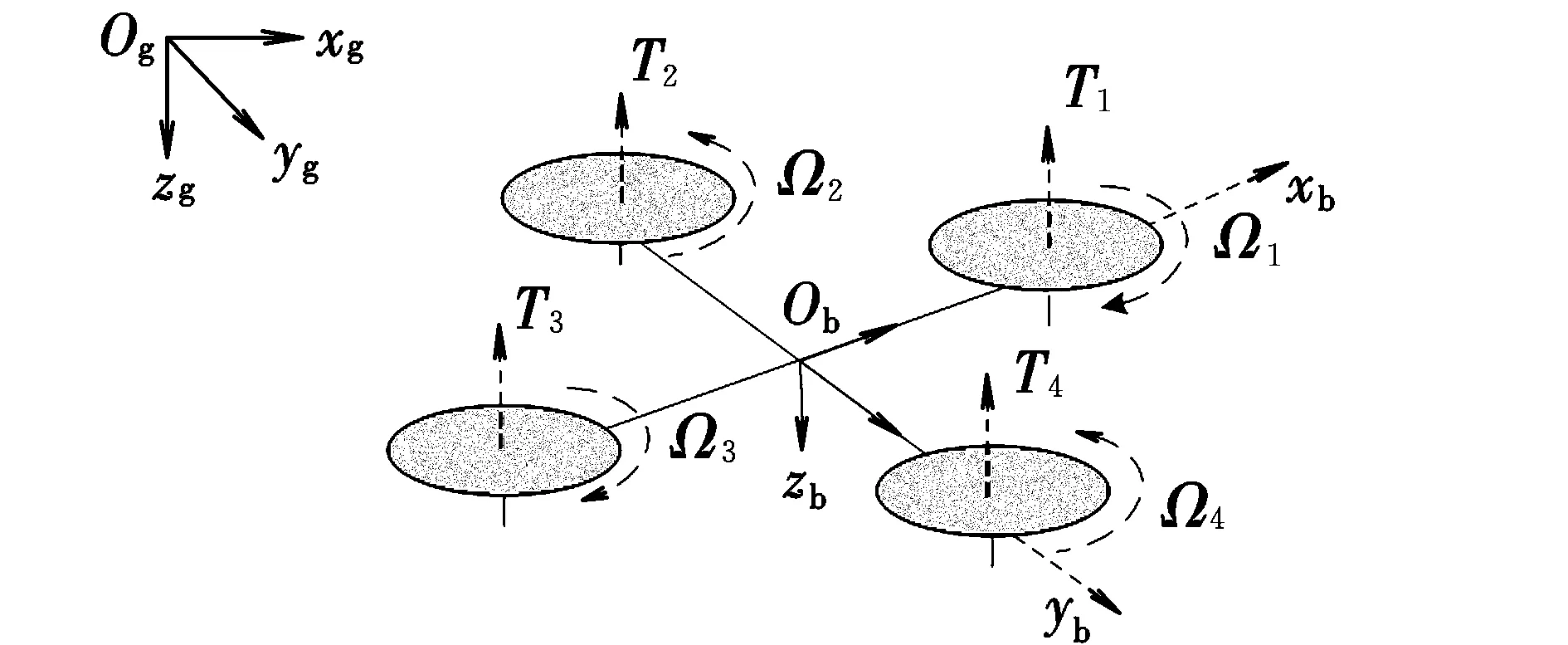
圖1 四旋翼無人機結構圖Fig.1 Structure diagram of quadrotor UAV
定義Ogxgygzg為慣性參考系,方向為北、東、地;Obxbybzb為本體坐標系,原點與無人機中心重合,滿足右手定則。由于傳統的歐拉角描述姿態會引起奇異現象,本文使用單位四元數描述無人機的姿態。定義單位四元數為Q=[qT,η]T∈R4,q=[q1,q2,q3]T∈R3為單位四元數矢量部分,η∈R為單位四元數標量部分,滿足qTq+η2=1;R(Q)∈R3×3為從慣性坐標系到本體坐標系的旋轉矩陣,可用四元數表示為[8]:
(1)
四旋翼無人機動力學微分方程為:
(2)
式中:m為無人機質量;g為重力加速度;I為慣性矩陣;T∈R為待設計的四旋翼無人機輸入升力;MΣ為待設計的輸入轉矩,MΣ=[MΣ1,MΣ2,MΣ3]T∈R3。T,MΣ與旋翼轉速fi(i=1,2,3,4)的關系為[9]:
(3)
式中:l為四旋翼本體坐標系原點到螺旋槳中心的距離;CD為阻力系數;CL為升力系數。
由式(3)可知,完成升力與轉矩的設計后,即可唯一確定4個旋翼所需的轉速。
2 姿態子系統控制器設計

(4)
其中:

從而可以建立模型(2)的姿態誤差系統為:
(5)
其中:
選取滑模函數:
(6)


(7)
3 位置子系統高增益觀測器及控制器
設計
3.1 高增益觀測器設計及穩定性分析

(8)
(9)


(10)
3.2 控制器設計
對于位置子系統,設計滑模函數為:

(11)
其中:
設計三維控制輸入U=[u1,u2,u3]T為:
(12)
通過設計出的U可得到實際升力輸入T為:
(13)
理想姿態以及理想角速度為:
(14)
(15)
4 穩定性分析
控制系統的穩定性可以總結為如下定理:
定理1:考慮式(2)描述的四旋翼無人機姿態子系統,對于式(14)和式(15)表示的參考信號Qd和Ωd,采用式(7)所設計的輸入轉矩M∑,可以使系統的狀態變量q,η,Ω在有限時間內收斂到期望的軌跡。
(16)
因此有:
(17)
當s=0時,Terminal滑模面滿足:
(18)
對式(18)分離變量,并對等號兩端積分可得:
(19)
最終可以得到系統達到平衡狀態的時間為:
(20)
定理2:考慮式(2)四旋翼無人機位置子系統,對于給定的參考信號Pd,采用式(12)和式(13)所設計的輸入升力T和觀測器(9),可以使閉環系統漸進穩定,且系統狀態變量P,v收斂到期望軌跡。

(21)

(22)
其中:
(23)

5 仿真驗證及結果分析
由圖2可以看出,在線速度信號不可測時,狀態高增益觀測器可以僅通過位置信息實現對無人機速度的快速估計;由圖3可知,利用所觀測的速度信息設計的位置控制器可以保證系統對目標軌跡的跟蹤;由圖4可以看出,所設計的Terminal滑模控制器可以實現對目標姿態的快速跟蹤。
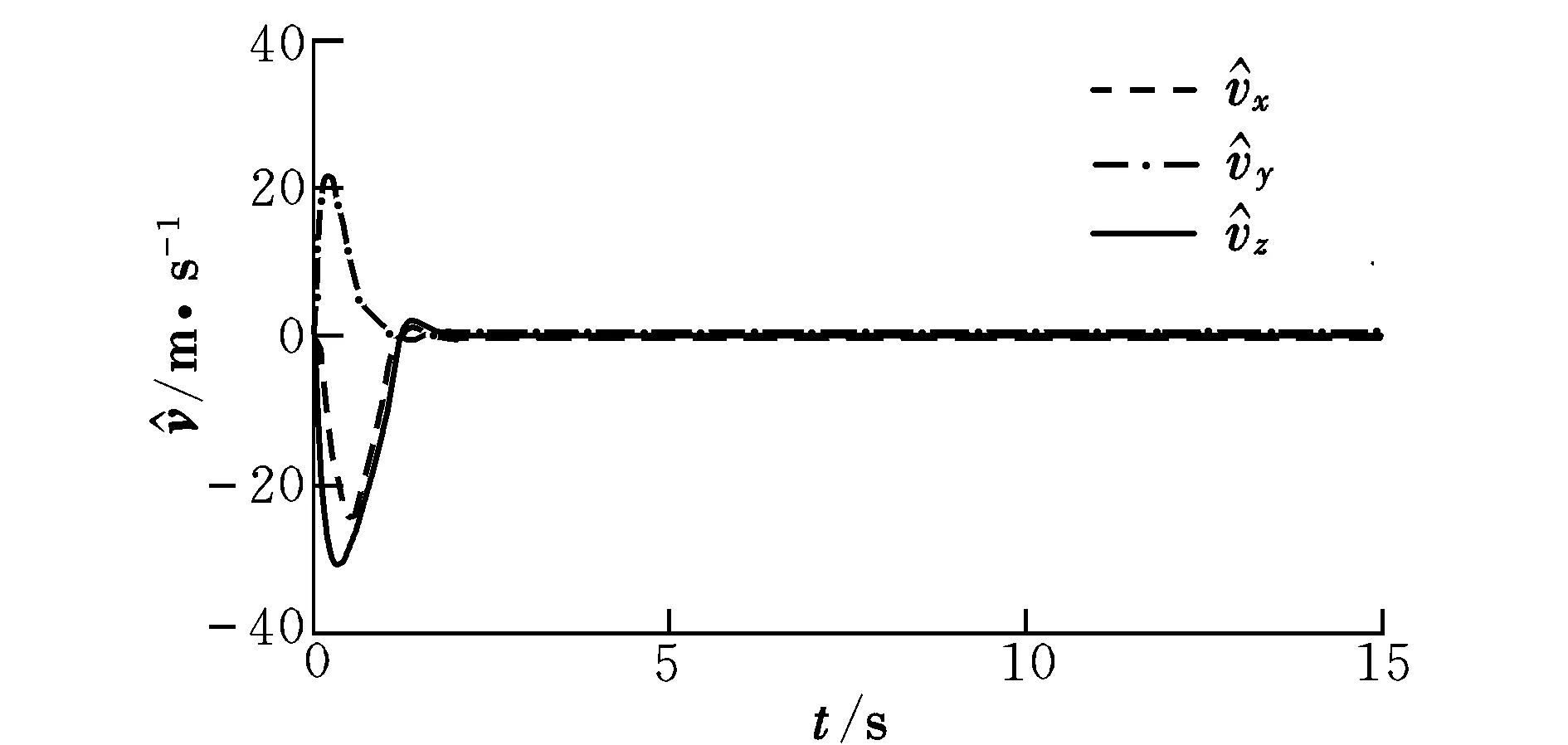
圖2 速度觀測誤差Fig.2 Velocity estimate errors
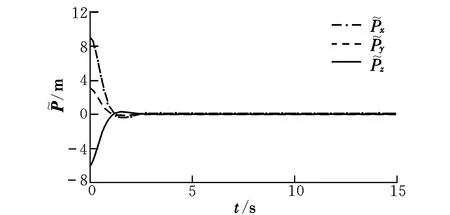
圖3 軌跡跟蹤誤差Fig.3 Trajectory tracking errors

圖4 姿態跟蹤誤差Fig.4 Attitude tracking errors
6 結束語
為了實現四旋翼無人機姿態的快速跟蹤,首先通過引入Terminal滑模面,設計出了在有限時間內收斂的姿態控制器;其次考慮在平動線速度不可測、僅知道位置信號的情況下,設計指數收斂的高增益觀測器估計出速度信號;最后利用內外環結構,設計出了位置控制器。仿真效果表明,高增益觀測器可以快速觀測出實際的速度信息,所設計的控制器在平動線速度不可測的情況下,仍然可以實現對四旋翼無人機參考軌跡的快速跟蹤。
[1] Yang L,Liu J.Parameter identification for a quadrotor helicopter using PSO[C]//Decision and Control (CDC),2013 IEEE 52nd Annual Conference on.Florence,Italy:IEEE,2013:5828-5833.
[2] 方旭,劉金琨.四旋翼無人機三維航跡規劃及跟蹤控制[J].控制理論與應用,2015,32(8):1120-1128.
[3] Besnard L,Shtessel Y B,Landrum B.Quadrotor vehicle control via sliding mode controller driven by sliding mode disturbance observer[J].Journal of the Franklin Institute,2012,349(2):658-684.
[4] Lee D,Kim H J,Sastry S.Feedback linearization vs.adaptive sliding mode control for a quadrotor helicopter[J].International Journal of Control,Automation and Systems,2009,7(3):419-428.
[5] 甄紅濤,齊曉慧,李杰,等.四旋翼無人機L1自適應塊控反步姿態控制器設計[J].控制與決策,2014,29(6):1076-1082.
[6] Raffo G V,Ortega M G,Rubio F R.An integral predictive/nonlinearH∞control structure for a quadrotor helicopter[J].Automatica,2010,46(1):29-39.
[7] Bertrand S,Guénard N,Hamel T,et al.A hierarchical controller for miniature VTOL UAVs:design and stability analysis using singular perturbation theory[J].Control Engineering Practice,2011, 19(10):1099-1108.
[8] Shuster M D.A survey of attitude representations[J].Journal of the Astronautical Sciences,1993,41(4):439-517.
[9] Zuo Z.Trajectory tracking control design with command-filtered compensation for a quadrotor[J].IET Control Theory & Applications,2010,419(11):2343-2355.
[10] Khalil H K,Praly L.High-gain observers in nonlinear feedback control[J].International Journal of Robust & Nonlinear Control,2007,24(6):249-268.
[11] Krstic M,Kanellakopoulos I,Kokotovic P.Nonlinear and adaptive control design[M].New York:Wiley Interscience,1995:74-75.
(編輯:李怡)
Trajectory tracking control of quadrotor UAV based on high-gain observer
WANG Rui, LIU Jin-kun
(School of Automation Science and Electrical Engineering, BUAA, Beijing 100191, China)
An attitude controller for quadrotor UAV was designed based on terminal sliding mode control method to ensure a rapid orientation tracking, where a nonlinear function was introduced to design a terminal sliding mode surface, so that the tracking error could converge to zero in finite time. Considering the linear velocity was unavailable for feedback, a high-gain observer was designed to estimate the linear velocity of the quadrotor UAV. With the estimate value of the linear velocity, a position controller was designed. Based on Lyapunov theory, the stability of the closed-loop system was proved. Simulation results show that a rapid trajectory tracking performance is guaranteed without linear velocity feedback.
quadrotor UAV; high-gain observer; Terminal sliding mode; linear velocity-free feedback
2016-06-16;
2016-10-25;
時間:2016-11-10 09:10
國家自然科學基金資助(61374048)
王銳(1992-),男,山東煙臺人,碩士研究生,研究方向為無人機飛行控制; 劉金琨(1965-),男,遼寧大連人,教授,博士生導師,研究方向為先進運動控制。
V249.1
A
1002-0853(2017)01-0039-04
猜你喜歡
河北畫報(2020年8期)2020-10-27 02:54:06
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04
