輪邊電機驅(qū)動型電動汽車動力系統(tǒng)參數(shù)優(yōu)化設計
2017-02-28 10:49:13龔賢武唐自強許世維賀伊琳
合肥工業(yè)大學學報(自然科學版) 2017年1期
關鍵詞:優(yōu)化
龔賢武, 唐自強, 趙 軒, 許世維, 賀伊琳
(1.長安大學 電子與控制工程學院,陜西 西安 710064; 2.長安大學 汽車學院,陜西 西安 710064)
輪邊電機驅(qū)動型電動汽車動力系統(tǒng)參數(shù)優(yōu)化設計
龔賢武1, 唐自強2, 趙 軒2, 許世維2, 賀伊琳2
(1.長安大學 電子與控制工程學院,陜西 西安 710064; 2.長安大學 汽車學院,陜西 西安 710064)
文章對輪邊電機驅(qū)動型電動汽車動力傳動系統(tǒng)參數(shù)進行了優(yōu)化設計。依據(jù)行駛工況高頻車速區(qū)間與電機高效區(qū)域相重合的原則以及滿足整車性能指標的要求,引入工況加權因子,對輪邊電機和蓄電池參數(shù)進行了匹配;以整車動力性指標為約束、整車加權工況平均能量消耗最小為目標,分別采用粒子群算法(particle swarm optimization,PSO)和遺傳算法(genetic algorithm,GA)對固定擋速比進行了優(yōu)化設計;并基于Matlab/Simulink搭建的整車性能仿真平臺,對整車性能進行了仿真分析。仿真結果表明,整車性能均能滿足設計要求;通過與以單循環(huán)NEDC工況能耗最小為目標的速比優(yōu)化結果的對比,表明以加權工況平均能耗最小為目標的速比優(yōu)化設計方法能夠兼顧不同工況下能耗經(jīng)濟性,具有較好的適用性。
電動汽車;輪邊驅(qū)動;參數(shù)匹配;速比優(yōu)化;智能算法
目前研發(fā)的電動汽車僅在傳統(tǒng)汽車結構的基礎上改裝而成,并沒有發(fā)揮電機驅(qū)動擁有的技術優(yōu)勢[1]。而輪邊電機驅(qū)動型電動汽車是一種有別于傳統(tǒng)汽車結構的新型電動汽車,其中輪邊電機通過固定擋減速器和半軸直接驅(qū)動車輪,因此每個車輪轉(zhuǎn)矩和轉(zhuǎn)速由各電機控制器獨立控制[2]。相比于傳統(tǒng)汽車和集中式驅(qū)動電動汽車,輪邊電機驅(qū)動型電動汽車省去了變速器、傳動軸、變速驅(qū)動橋等部件,各驅(qū)動車輪的獨立控制使得整車的動力性、操縱穩(wěn)定性、車輛空間利用率以及制動能量回收均得到有效提升[2-3]。相比于輪轂電機驅(qū)動型電動汽車,輪邊電機驅(qū)動型電動汽車可以將簧下質(zhì)量轉(zhuǎn)移到車身,因此車輛的操縱穩(wěn)定性更優(yōu);同時輪胎磨損情況、電機安裝以及維修調(diào)試方便性方面也更優(yōu),因此產(chǎn)品更適合應用[4]。
當前,輪邊電機驅(qū)動型電動汽車的研究熱點主要集中在電子差速以及驅(qū)動控制等方面[3,5-6],而對輪邊電機驅(qū)動型電動汽車參數(shù)匹配的研究較少。文獻[1]依據(jù)整車性能指標對兩后輪獨立輪轂電機驅(qū)動型電動汽車的輪轂電機和蓄電池參數(shù)進行了匹配;文獻[2]對輪邊電機驅(qū)動型電動汽車的驅(qū)動電機進行了選型與匹配,但沒有對動力傳動系統(tǒng)其他部件進行匹配;文獻[7-8]依據(jù)整車性能指標對純電動汽車傳動系統(tǒng)參數(shù)進行了初步匹配,并基于智能優(yōu)化算法,在單一工況下對傳動系統(tǒng)部件參數(shù)進行優(yōu)化設計。然而上述文獻在對驅(qū)動電機參數(shù)匹配的過程中,沒有考慮不同工況高頻車速區(qū)間與電機高效區(qū)域相重合的原則,僅僅以單一循環(huán)工況消耗最少為目標對傳動系統(tǒng)部件參數(shù)進行優(yōu)化,不能有效地檢驗整車在其他工況下運行時的適應性。
本文針對一款前輪輪邊電機驅(qū)動型電動汽車的傳動系統(tǒng),分析了以加權工況高頻車速區(qū)間與電機高效區(qū)域相重合為原則、以滿足整車性能指標為要求的輪邊電機和電池參數(shù)的匹配方法;提出了整車加權工況平均能耗最小為目標、動力性為約束的2種智能優(yōu)化算法的固定擋速比優(yōu)化設計方案;基于Matlab/Simulink搭建整車性能仿真平臺,對整車性能進行了仿真分析;并通過與以單循環(huán)NEDC工況能耗最小為目標的速比設計方案的對比,驗證了本文提出的速比設計方案的有效性。
1 整車驅(qū)動系統(tǒng)、參數(shù)及性能指標
前輪輪邊電機驅(qū)動型電動汽車的動力傳動系統(tǒng)結構如圖1所示,驅(qū)動電機通過固定擋速比減速器、半軸將動力傳遞至車輪。通常情況下驅(qū)動電機峰值轉(zhuǎn)矩越大,整車動力性越好,然而電機峰值轉(zhuǎn)矩增加會使電機尺寸與質(zhì)量增加,反而影響整車經(jīng)濟性,同時帶來車輛成本的增加[9]。因此,通常設置一級或兩級齒輪的固定擋減速器來降低對驅(qū)動電機峰值轉(zhuǎn)矩的需求。某前輪輪邊電機驅(qū)動型電動汽車的基本參數(shù)與性能指標見表1所列。

圖1 動力傳動系統(tǒng)構型
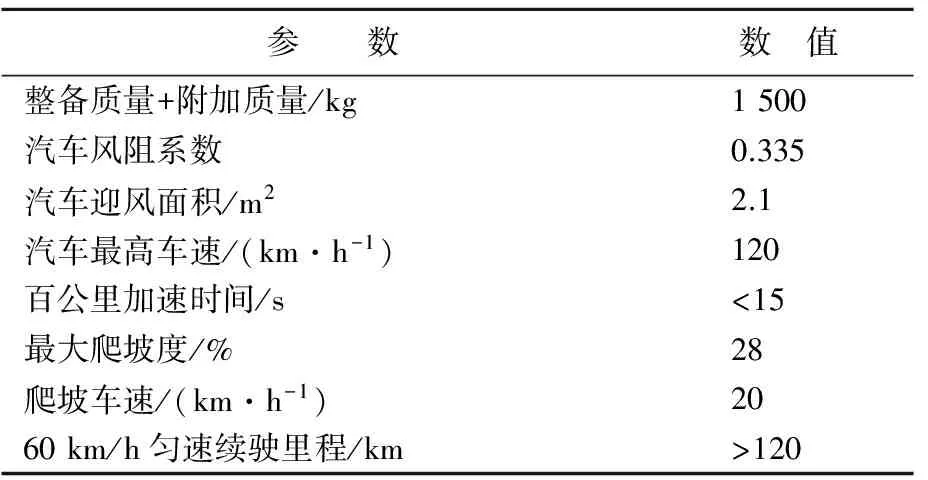
參 數(shù)數(shù) 值整備質(zhì)量+附加質(zhì)量/kg1500汽車風阻系數(shù)0.335汽車迎風面積/m22.1汽車最高車速/(km·h-1)120百公里加速時間/s<15最大爬坡度/%28爬坡車速/(km·h-1)2060km/h勻速續(xù)駛里程/km>120
2 輪邊電機及蓄電池參數(shù)匹配
2.1 輪邊電機參數(shù)匹配
輪邊電機的額定參數(shù)代表著電機的高效工作點,對整車經(jīng)濟性有重要影響,而其峰值參數(shù)對整車動力性也有重要影響。
2.1.1 輪邊電機額定參數(shù)匹配
輪邊電機實際工作點與整車經(jīng)濟性有直接關系,而電機額定參數(shù)是電機高效率區(qū)間,同時電機實際工作點決定于電動汽車的行駛工況,因此,在目前電動汽車電池技術尚未取得有效突破的情況下,結合電動汽車的行駛工況,使工況高頻車速區(qū)間與電機額定參數(shù)相重合是提高整車能耗經(jīng)濟性的有效方法。但當前還沒有針對電動汽車專用的行駛工況出現(xiàn),因此本文仍使用傳統(tǒng)燃油汽車的行駛工況。另外,因為不同行駛工況所對應的車速-時間歷程不同,所描述車輛的行駛狀態(tài)也不同,且電動汽車的實際行駛狀態(tài)復雜多變,很難用單一工況來表征,所以本文選取具有代表性的3種循環(huán)工況,即歐洲NEDC循環(huán)工況、美國UDDC循環(huán)工況以及日本JC08循環(huán)工況。這3種工況的高頻車速區(qū)間見表2所列,通過設定不同工況加權因子σ,對輪邊電機額定參數(shù)進行匹配。
(1)
其中,VN-h為引入工況加權因子后的車輛高頻車速區(qū)間;σ1為NEDC工況加權因子,值為0.5;σ2為UDDC工況加權因子,值為0.3;σ3為JC08工況加權因子,值為0.2;VNEDC-h為NEDC工況高頻車速區(qū)間;VUDDC-h為UDDC工況高頻車速區(qū)間;VJC08-h為JC08工況高頻車速區(qū)間。
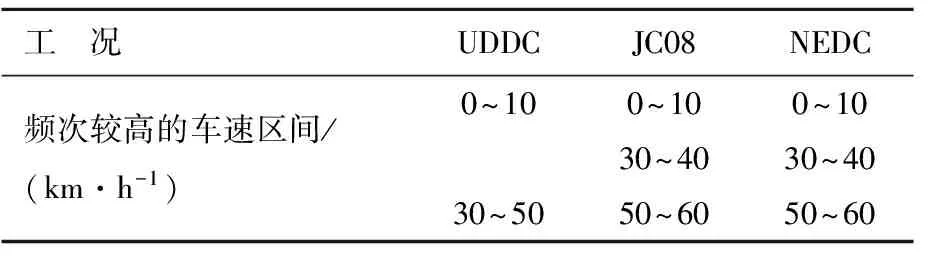
表2 不同工況的車速分析
由表2可知車速高頻區(qū)間主要分為低速高頻區(qū)間與中速高頻區(qū)間,由(1)式可知車輛中速高頻車速區(qū)間為35~47km/h。當車輪滑移率為10%時,輪邊電機額定轉(zhuǎn)速nnom為:
(2)
其中,unom為車輛高頻車速區(qū)間;i為固定擋減速器速比;R為車輪半徑,其值為0.282 m;根據(jù)10%車輪滑移率下車輛最高行駛車速需求,可知固定擋減速器速比i范圍為:
(3)
其中,nmax為電機最高轉(zhuǎn)速,其值為8 500 r/min;uamax為汽車最高車速。
由(3)式可知,i≤6.778,初選i為6.700,代入(2)式,可知電機額定轉(zhuǎn)速范圍為2 451~3 291 r/min。本文選擇輪邊電機額定轉(zhuǎn)速nnom為3 000 r/min。根據(jù)整車最高車速行駛的功率需求,確定輪邊電機額定功率Pe為:
(4)
其中,ηT為傳動效率,其值為0.97;f為滾動阻力系數(shù),其值為0.01;Cd為汽車風阻系數(shù);A為汽車迎風面積;m為整備質(zhì)量和附加質(zhì)量。
由(4)式解得電機額定功率Pe為10.76 kW,因此電機額定轉(zhuǎn)矩Te為:
Te=9 550Pe/nnom
(5)
由(5)式可以得到,電機的額定轉(zhuǎn)矩Te為34.25 N·m。
2.1.2 輪邊電機峰值參數(shù)匹配
依據(jù)整車性能指標最高車速、最大爬坡度和百公里加速時間來匹配輪邊電機峰值功率[10]。
車輛以最高車速行駛時,輪邊電機輸出功率Pe1應滿足:
(6)
車輛以最低穩(wěn)定車速爬坡時,輪邊電機輸出功率Pe2應滿足:
(7)
(8)
車輛百公里加速時間要求下,輪邊電機輸出功率Pe3應滿足:
(9)
(10)
其中,δ為汽車旋轉(zhuǎn)質(zhì)量換算系數(shù),值為1.01;vf為百公里加速末時刻車速,其值為100 km/h;vb為電機額定轉(zhuǎn)速對應的車速,其值為47.6 km/h。
輪邊電機峰值功率應同時滿足以上3種整車性能指標要求,因此Pmax=max(Pe1,Pe2,Pe3)=27.5 kW,電機峰值轉(zhuǎn)矩Tmax為:
(11)
由(11)式可得Tmax為87.54 N·m。
2.2 電池參數(shù)匹配
蓄電池作為電動汽車唯一的能量源,其性能參數(shù)決定了整車續(xù)駛里程和整車動力性能能否正常發(fā)揮。本文選取單體標稱容量為45 A·h、額定電壓為3.2 V的磷酸鐵鋰電池[10]。蓄電池參數(shù)需要同時滿足輪邊電機峰值功率和整車設計續(xù)駛里程的需求,通常情況下,當滿足續(xù)駛里程需求時即可滿足峰值功率需求,因此單體電池組數(shù)N為:
(12)
其中,P為60 km/h勻速行駛時功率需求,其值為4.58 kW;S為60 km/h勻速續(xù)駛里程;v為車速,其值為60 km/h;Ub為單體電池工作電壓,其值為3.2 V;Db為電池放電深度,其值為0.8;Cb為單體電池容量,其值為45 A·h;η1為電池化學能與車輛動能之間的轉(zhuǎn)換效率,其值為0.912;η2為車輛其他附屬部件的能耗比例,其值為0.95。由(12)式可得單體電池組數(shù)N為92組。
3 固定擋速比優(yōu)化設計
當輪邊電機、蓄電池參數(shù)以及整車控制策略確定后,固定擋速比參數(shù)是決定整車動力性和經(jīng)濟性的唯一因素[8]。初選固定擋速比i為6.7,然而在該傳動比下無法確保電動汽車不同行駛工況下始終處于能耗最優(yōu),因此有必要對固定擋速比進行優(yōu)化設計。因為當前電動汽車續(xù)駛里程的提高比整車動力性的提高更為重要,所以本文以整車動力性指標為約束,在循環(huán)工況加權因子下,以整車加權工況平均能量消耗最小為目標,分別采用粒子群算法(particle swarm optimization,PSO)和遺傳算法(genetic algorithm,GA)對輪邊電機驅(qū)動型電動汽車固定擋速比進行優(yōu)化設計,優(yōu)化過程軟件架構如圖2所示。

圖2 傳動系統(tǒng)速比優(yōu)化軟件架構
3.1 優(yōu)化目標函數(shù)
輪邊電機驅(qū)動型電動汽車的優(yōu)化目標是在整車動力性約束條件下,盡可能提高整車經(jīng)濟性,為提高電動汽車對不同循環(huán)工況的適用性,在工況加權因子下,確定整車加權工況平均能量消耗最小為優(yōu)化目標函數(shù),整車加權工況平均能量消耗值為:
(13)
其中,Wcyc為整車加權工況平均能量消耗值;PNEDC-cyc為NEDC工況電池輸出功率;TNEDC-cyc為NEDC工況仿真時間,其值為1 200 s;PUDDC-cyc為UDDC工況電池輸出功率;TUDDC-cyc為UDDC工況仿真時間,其值為1 367 s;PJC08-cyc為JC08工況電池輸出功率;TJC08-cyc為JC08工況仿真時間,其值為1 200 s。
3.2 約束條件及約束處理
固定擋速比優(yōu)化過程中,主要包括整車動力性約束(最高車速、加速時間和最大爬坡度)以及驅(qū)動輪極限附著力的限制。
根據(jù)車輛設計行駛最高車速和電機最高轉(zhuǎn)速,確定固定擋速比i上限值為:
(14)
根據(jù)車輛穩(wěn)定車速爬坡時性能需求,確定固定擋速比i下限值為:
(15)
根據(jù)0~100 km/h加速時間要求,確定固定擋速比i約束為:
(16)
根據(jù)車輪最大驅(qū)動力不大于地面對各驅(qū)動輪的最大附著力Fxmax,確定固定擋速比i上限值為:
(17)
根據(jù)電機最高轉(zhuǎn)速時峰值轉(zhuǎn)矩Tm產(chǎn)生的驅(qū)動力不小于最高行駛車速下的行駛阻力,確定固定擋速比i下限值為:
(18)
由(14)~(18)式可得固定擋速比i的取值范圍為[6.341,6.778],而速比優(yōu)化設計過程屬于有約束實際工程優(yōu)化問題,常見的約束優(yōu)化處理方法主要包括比較個體優(yōu)劣法、罰函數(shù)法以及雙適應值法等[10]。本文選用比較個體優(yōu)劣法作為約束處理方法。
3.3 基于智能算法的速比優(yōu)化設計
3.3.1PSO算法
基于PSO算法的速比優(yōu)化設計流程如圖3所示,每個可能的固定擋速比解被認為是搜索空間的1個粒子,且每個粒子都有1個與目標函數(shù)對應的適應度值,假設在該一維空間中,由n個粒子組成的種群X=(X1,X2,…,Xn),根據(jù)目標函數(shù)計算出每個粒子位置Xi對應的適應度值,其中第i個粒子的速度可表示為Vi,個體極值為pi,種群的群體極值為pg。在每次迭代的過程中,粒子按照以下規(guī)則更新自身的速度和位置[11],即
Vi(t+1)=wVi(t)+c1rand[pi(t)-
(20)
其中,w為慣性權重因子,其值為0.72;c1和c2為學習因子,其值為1.49;rand為取0~1之間的隨機函數(shù)。仿真中n為30,迭代次數(shù)為40。

圖3 PSO算法流程
3.3.2GA算法
基于GA算法的速比優(yōu)化設計流程如圖4所示。
(1) 編碼成位串。將固定擋速比編碼轉(zhuǎn)化為二進制字符串,構成1個串結構數(shù)據(jù)(即染色體),本文的i變化范圍為0.437,為確保優(yōu)化數(shù)值精確到小數(shù)點后4位,選擇9位二進制編碼。
(2) 生成初始種群。1個串結構數(shù)據(jù)作為種
群中的1個個體,初始隨機生成N個串結構數(shù)據(jù)構成初始種群,仿真過程中N為30。
(3) 計算適應度。通過目標函數(shù)與適應度的映射關系得到個體的適應度。
(4) 選擇與遺傳。選擇個體適應度較大的個體作為下一代遺傳的基礎,通過交叉與變異對個體串結構進行部分修改,防止過早陷入局部收斂。
(5) 重新插入生成新種群。將經(jīng)過選擇、交叉與變異操作后的串結構數(shù)據(jù),重新插入并取代原始種群中的串結構數(shù)據(jù),形成新的種群。
(6) 終止條件判斷。當?shù)螖?shù)少于或等于設定的迭代次數(shù)M時,跳轉(zhuǎn)至步驟(2);反之結束優(yōu)化過程,仿真過程中M為40。
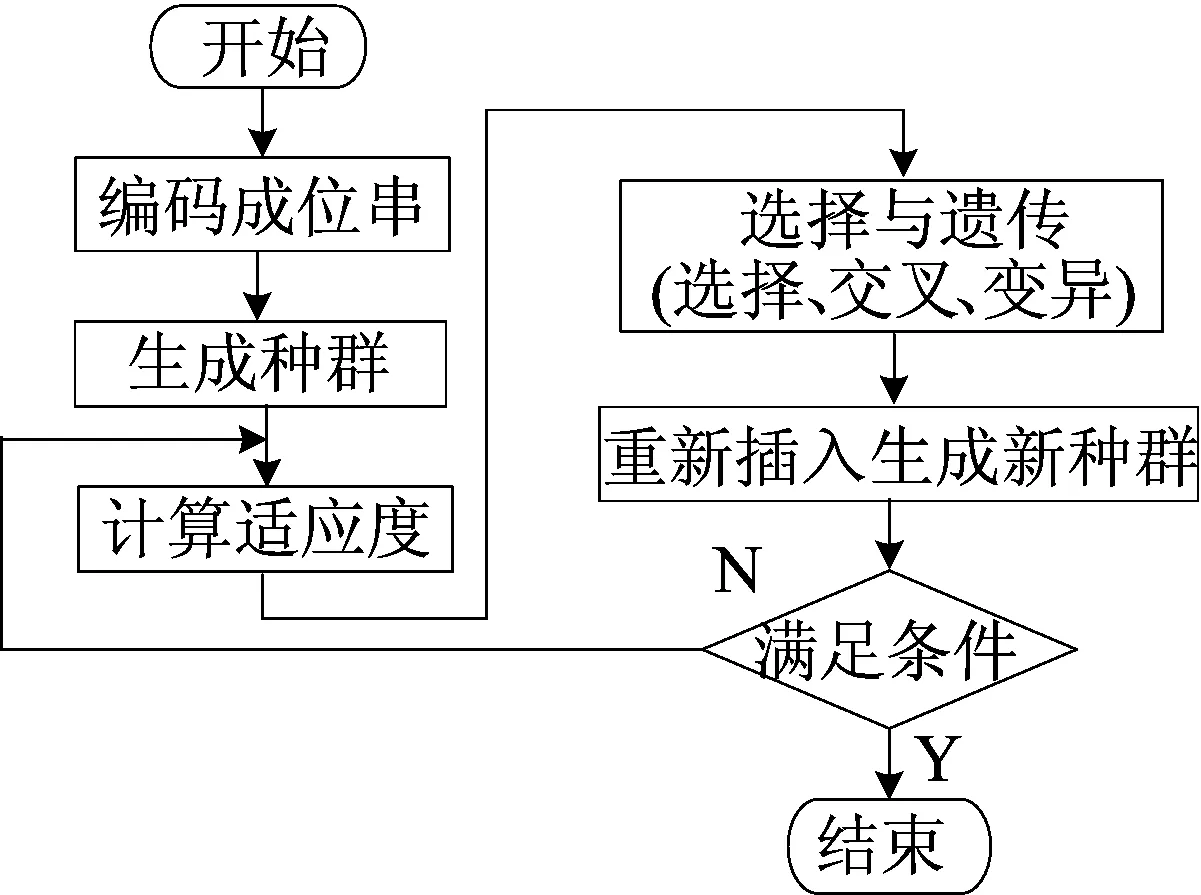
圖4 GA算法流程
3.4 整車動力性仿真平臺
本文基于Matlab/Simulink搭建了后向為主、前向為輔的純電動汽車整車動力學仿真模型,模型如圖5所示。
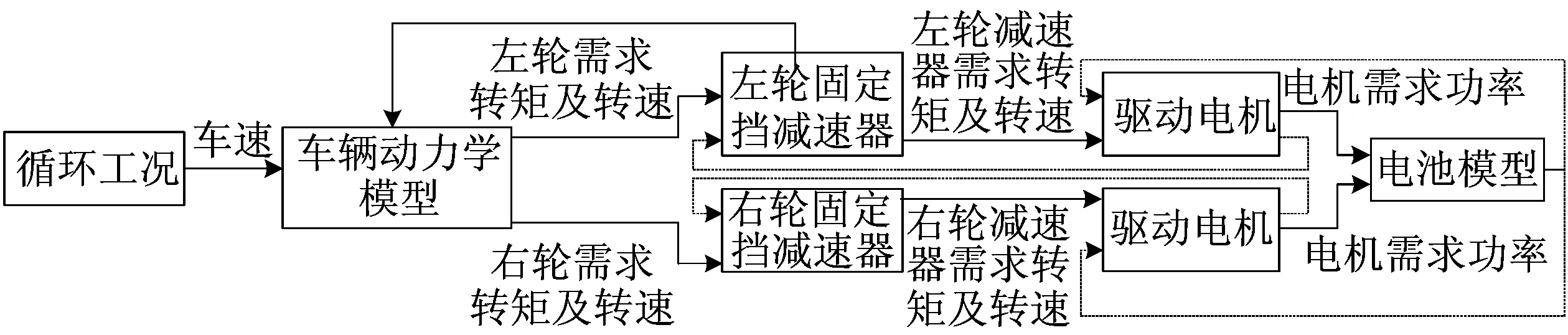
圖5 純電動汽車動力學仿真模型
4 仿真分析
為了驗證以加權工況平均能耗最小為目標的速比優(yōu)化設計方法能夠兼顧不同工況下的能耗經(jīng)濟性,本文增加了以單循環(huán)NEDC工況能耗最小為目標的速比優(yōu)化仿真。2種優(yōu)化目標下不同優(yōu)化算法的整車性能仿真結果見表3所列。由表3可知,2種優(yōu)化目標下的整車性能均滿足設計性能指標,且以加權工況平均能耗最小為目標優(yōu)化設計方法下的多項整車性能更優(yōu),驗證了本文優(yōu)化設計方法的有效性。
以加權工況平均能耗最小為目標,基于PSO和GA算法的適應度值變化情況如圖6所示。以加權工況平均能耗最小為目標,基于PSO和GA算法的固定擋減速器速比優(yōu)化情況如圖7所示。
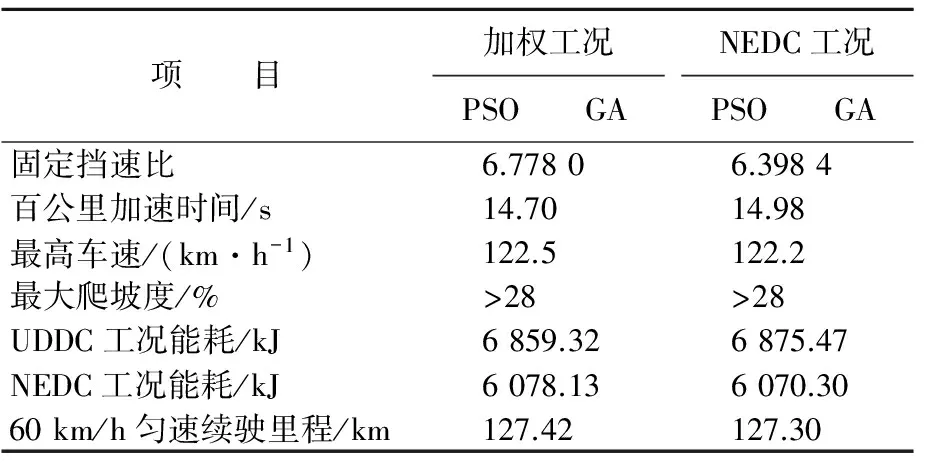
表3 2種優(yōu)化目標下速比優(yōu)化后的整車性能
由圖6、圖7可知,2種優(yōu)化算法下的速比尋優(yōu)結果相同,由于GA中的選擇、交叉以及變異算子的使用,與PSO相比,其速比優(yōu)化過程波動更大。
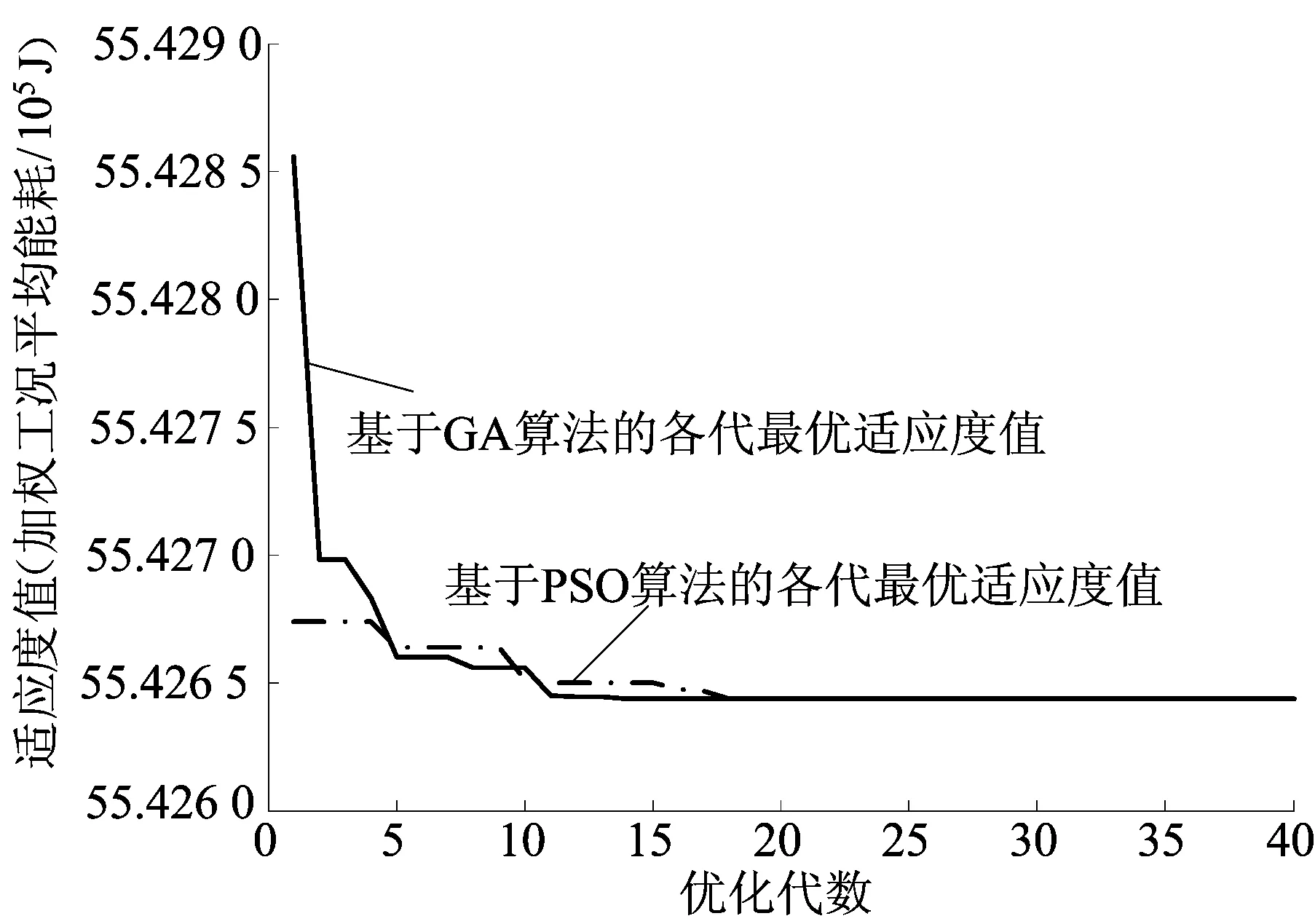
圖6 加權工況平均能耗最小為目標的適應度值變化
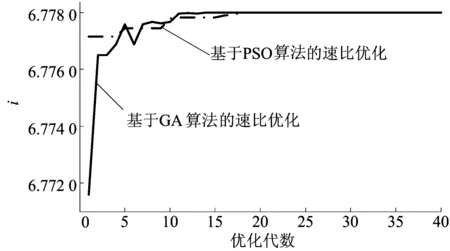
圖7 加權工況平均能耗最小為目標的速比優(yōu)化
以單循環(huán)NEDC工況能耗最小為目標,基于2種優(yōu)化算法下的速比優(yōu)化情況如圖8所示。
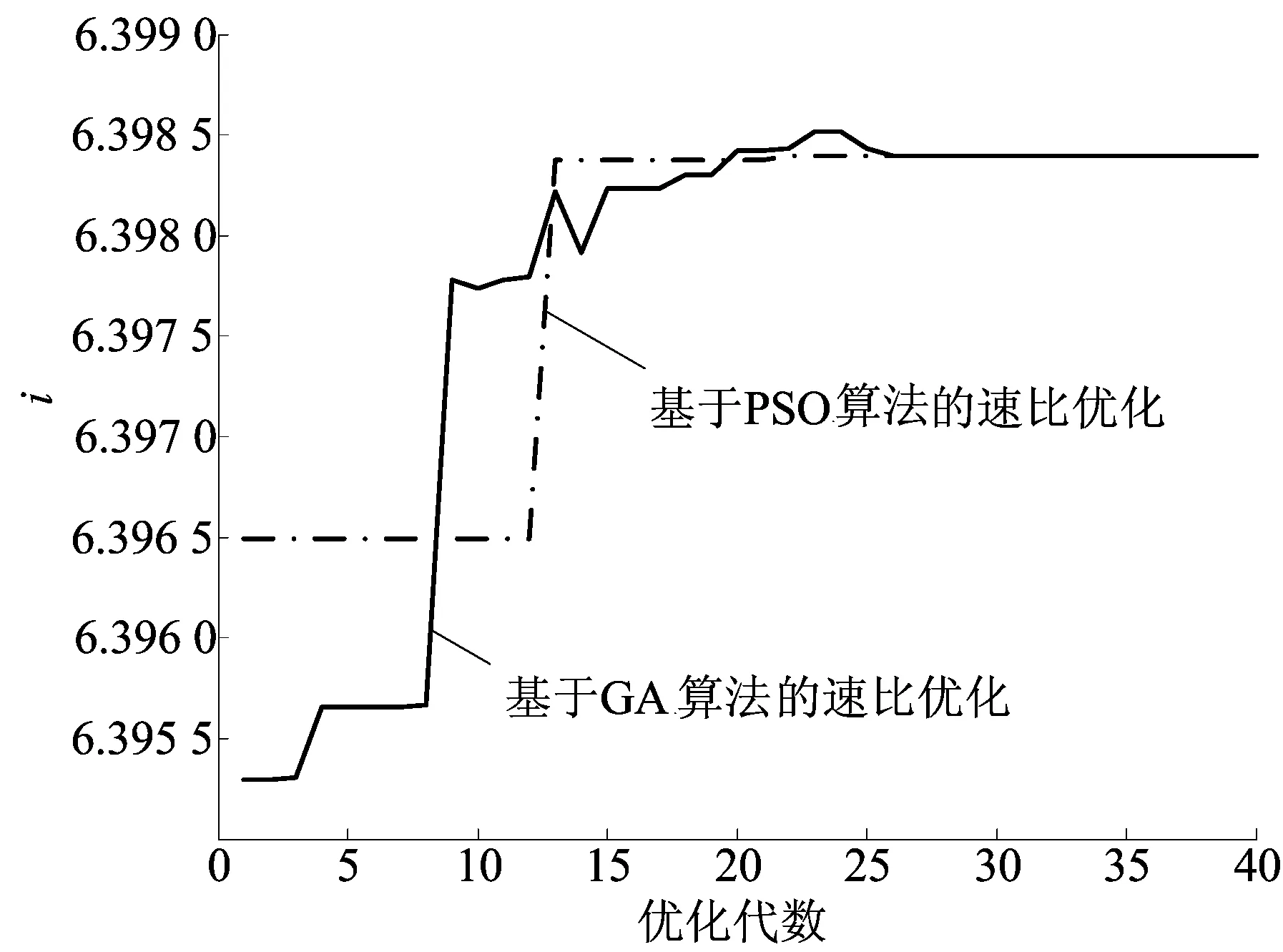
圖8 單循環(huán)NEDC工況能耗最小為目標的速比優(yōu)化
由圖7、圖8可以看出,以加權工況平均能耗最小為目標的速比優(yōu)化值(6.778 0)大于以單循環(huán)NEDC工況能耗最小為目標的速比優(yōu)化值(6.398 4),并且給出了不同優(yōu)化目標下速比優(yōu)化值的NEDC和UDDC能耗仿真情況,結果如圖9所示。
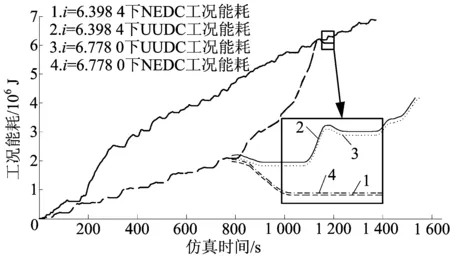
圖9 2種速比下NEDC和UDDC工況能耗仿真
從圖9中可以看出,速比為6.778 0下的NEDC和UDDC工況能耗處于速比為6.398 4的2種工況能耗之間,且由表3中2種優(yōu)化目標下的整車UDDC和NEDC工況能耗值可以看出,盡管以NEDC工況能耗最小為目標的整車能耗比加權工況的低7.83 kJ,但其UDDC工況能耗比加權工況的高16.15 kJ,表明了以單循環(huán)NEDC工況能耗最小為目標的優(yōu)化設計方法只能確保NEDC工況下的能耗最優(yōu),而無法顧及其他工況下的能耗情況,因此,進一步驗證了以加權工況平均能耗最小為目標的速比設計方案的有效性,其具有更好的工況適用性。
2種優(yōu)化目標下整車加速性能仿真曲線如圖10所示。
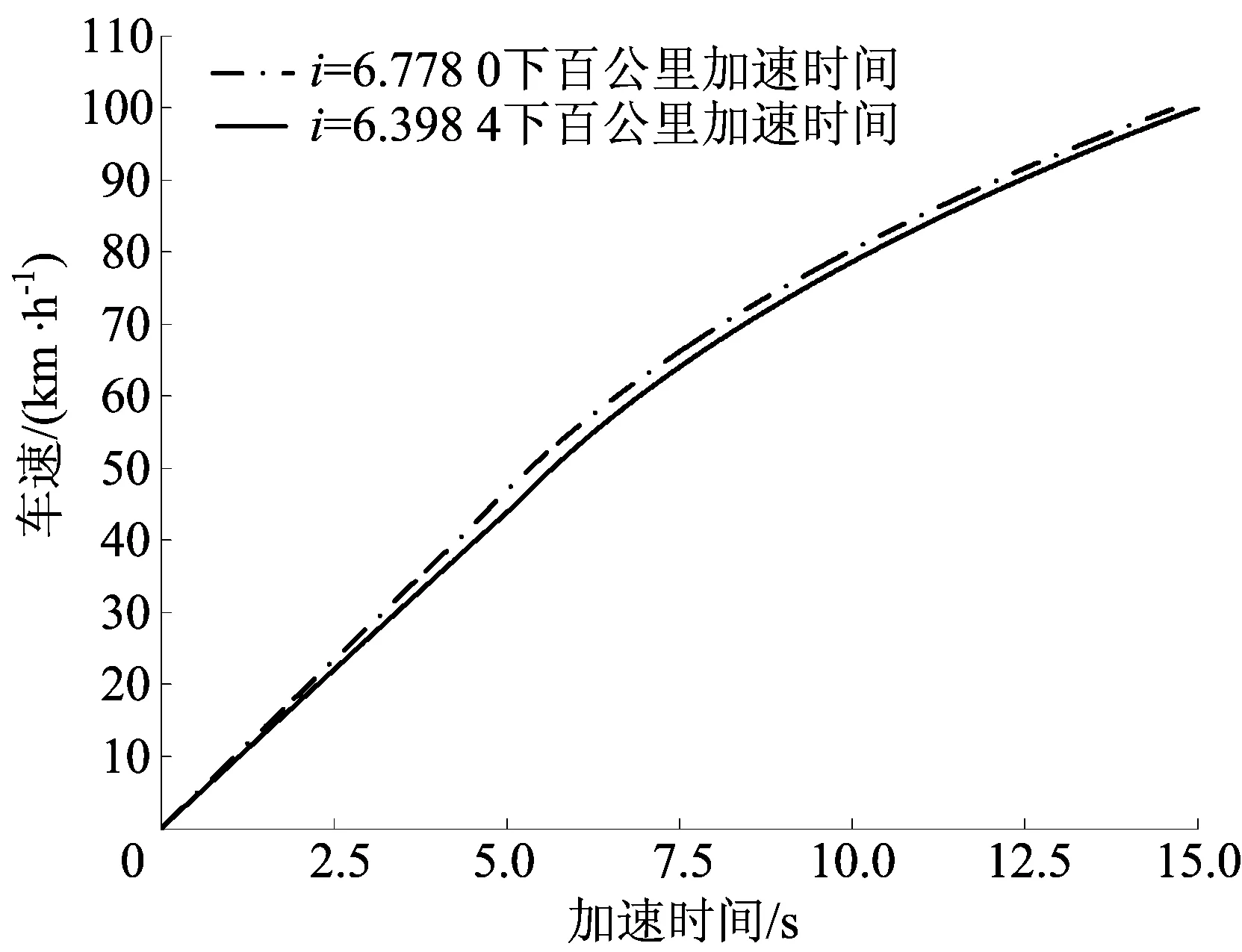
圖10 2種速比下加速性能仿真
2種優(yōu)化目標下的加速時間均小于15 s,滿足整車設計性能指標,因為以加權工況平均能耗最小為目標的優(yōu)化速比值更大,所以比以單循環(huán)NEDC工況能耗最小為目標的百公里加速時間提高了0.28 s。
5 結 論
本文針對前輪輪邊電機驅(qū)動型電動汽車的動力傳動系統(tǒng),給出了以工況加權因子下車速高頻區(qū)間與電機高效區(qū)間相重合為原則和滿足整車設計性能指標的輪邊電機與蓄電池參數(shù)匹配方法;提出了以加權工況平均能耗最小為目標,整車動力性為約束,基于PSO和GA算法的固定擋速比優(yōu)化設計方法;仿真分析表明整車性能均達標,并通過對比以單循環(huán)NEDC工況能耗最小為目標的速比優(yōu)化結果,表明以加權工況平均能耗最小為目標的優(yōu)化速比能夠兼顧不同工況達到能耗最優(yōu),提高了車輛對不同工況的適用性。
[1] 孟慶華,許進,王東峰.輪轂電機驅(qū)動型電動汽車動力系統(tǒng)研究[J].農(nóng)業(yè)機械學報,2013,44(8):33-37.
[2] 智晉寧,項昌樂,朱麗君,等.輪邊電機驅(qū)動汽車性能仿真與控制方法的研究[J].汽車工程,2012,34(5):389-393.
[3] 陳東,徐寅,梁華軍.雙電機后輪驅(qū)動混合動力汽車電子差速控制的研究[J].汽車工程,2013,35(1):46-50.
[4] 張媛媛.采用電動輪驅(qū)動的電動汽車轉(zhuǎn)矩協(xié)調(diào)控制研究[D].長春:吉林大學,2009.
[5] 翟麗,董守全,羅開宇.四輪轂電機獨立驅(qū)動車輛轉(zhuǎn)向電子差速控制[J].北京理工大學學報,2010,30(8):901-905.
[6] HADDOUN A,BENBOUZID M,DIALLO D,et al.Modeling,analysis,and neural network control of an EV electrical differential[J].IEEE Transactions on Industrial Electronics,2008,55(6):2286-2294.
[7] 周兵,江清華,楊易.兩擋變速器純電動汽車動力性經(jīng)濟性雙目標的傳動比優(yōu)化[J].汽車工程,2011,33(9):792-797.
[8] 秦大同,周保華,胡明輝,等.兩擋電動汽車動力傳動系統(tǒng)的參數(shù)設計[J].重慶大學學報,2011,34(1):1-6.
[9] GUZZELLA L,SCIARRETTA A.Vehicle propulsion systems: introduction to modeling and optimization[M].Heidelberg:Springer Verlag,2005.
[10] 龔賢武,唐自強,吳德軍,等.兩擋純電動汽車動力傳動系統(tǒng)參數(shù)設計與仿真[J].鄭州大學學報(工學版),2015,36(3):39-43.
[11] 劉華鎣,林玉娥,王淑云.粒子群算法的改進及其在求解約束優(yōu)化問題中的應用[J].吉林大學學報(理學版),2005,43(4):472-476.
(責任編輯 胡亞敏)
Optimization design of powertrain parameter for in-wheel motor driven electric vehicles
GONG Xianwu1, TANG Ziqiang2, ZHAO Xuan2, XU Shiwei2, HE Yilin2
(1.School of Electronic and Control Engineering, Chang’an University, Xi’an 710064, China; 2.School of Automobile, Chang’an University, Xi’an 710064, China)
The powertrain parameters for electric vehicles driven by in-wheel motor were designed. Firstly, according to the principle which makes the speed range of driving condition and the high efficiency range of the motor coincide, and the performance requirements of vehicle, a weighting factor of driving condition was introduced, and the parameters of the motor and the battery were matched. Then treating the vehicle dynamics indicators as constraint, and treating the minimal average energy consumption of weighting driving condition as target, the fixed gear ratio was designed respectively by particle swarm optimization(PSO) and genetic algorithm(GA). The vehicle performance was simulated and analyzed by the vehicle performance simulation platform which is built on Matlab/Simulink. The simulation results show that the vehicle performance can meet the design requirements; comparing with the result of ratio optimization whose target is the minimal energy consumption of single NEDC condition, it is shown that the gear ratio optimization design method can take into account the energy consumption of different economic conditions, whose target is the minimal average energy consumption of weighting driving condition, and this method has better applicability.
electric vehicle; in-wheel drive; parameter matching; ratio optimization; intelligence algorithm
2015-09-29;
2015-11-30
國家高技術研究發(fā)展計劃(863計劃)資助項目(2012AA111106);國家自然科學基金青年科學基金資助項目(51507013);中央高校基本科研業(yè)務費專項資金資助項目(2014G1321040;310822151025);陜西省自然科學基礎研究計劃資助項目(2016JQ5012)和陜西省工業(yè)科技攻關資助項目(2016GY-043)
龔賢武(1978-),男,福建邵武人,博士,長安大學副教授,碩士生導師.
10.3969/j.issn.1003-5060.2017.01.005
U469.72
A
1003-5060(2017)01-0024-07
猜你喜歡
房地產(chǎn)導刊(2022年5期)2022-06-01 06:20:14
能源工程(2022年1期)2022-03-29 01:06:28
建材發(fā)展導向(2021年12期)2021-07-22 08:06:48
建材發(fā)展導向(2021年7期)2021-07-16 07:07:52
中學生數(shù)理化(高中版.高二數(shù)學)(2021年12期)2021-04-26 07:43:48
中學生數(shù)理化(高中版.高考數(shù)學)(2021年12期)2021-03-08 01:28:50
今日農(nóng)業(yè)(2020年16期)2020-12-14 15:04:59
消費導刊(2018年8期)2018-05-25 13:20:08
家庭影院技術(2018年4期)2018-05-09 07:07:41
電子制作(2017年20期)2017-04-26 06:57:45