基于BDS的果園施藥機自動導航控制系統
2017-03-02 10:46:24張俊雄范智棋王大帥
農業機械學報 2017年2期
關鍵詞:作業
熊 斌 張俊雄 曲 峰 范智棋 王大帥 李 偉
(中國農業大學工學院, 北京 100083)
基于BDS的果園施藥機自動導航控制系統
熊 斌 張俊雄 曲 峰 范智棋 王大帥 李 偉
(中國農業大學工學院, 北京 100083)
根據果園施藥機自動導航噴藥作業需求,設計了一種基于北斗衛星導航系統(BDS)的施藥機自動導航控制系統。該系統主要包括RTK-BDS接收機、導航控制器、轉向控制器、電控氣動轉向系統和三軸電子羅盤。其中轉向控制器、電控氣動轉向系統和三軸電子羅盤構成轉向角閉環控制回路,該回路可根據導航控制器發送的施藥機期望轉向角實現轉向角的隨動控制。將施藥機的運動學模型和純追蹤模型相結合,設計了施藥機直線跟蹤導航控制器,輸入為位置坐標和方位角,輸出為期望轉向角。針對果園地形特點對施藥機進行了導航路徑規劃,并在果園進行現場試驗。試驗結果表明:所設計的導航控制系統,在施藥機行進速度為2 km/h時,直線跟蹤最大誤差不大于0.13 m,平均跟蹤誤差不大于0.03 m,能滿足果園自動導航作業精度要求。
果園; 施藥機; 自動導航; 控制系統; 北斗衛星導航系統
引言
我國作為水果生產大國,但果園種植、管理以及果實采收等工序機械化程度低、勞動強度大、成本高。果園機械的智能化導航,可以減輕果農勞動強度,提高果園作業效率和質量,對水果生產具有重要的研究意義和實際應用價值[1-4]。隨著差分式衛星定位技術的不斷發展,衛星定位精度不斷提高,載波相位差分衛星定位精度可達厘米級,越來越多學者已著力研究衛星定位技術在農業機械自動導航中的應用[5-12]。
日本國家農業研究中心利用DGPS(Differential global positioning system)和卡爾曼濾波器對耕地用拖拉機進行導航試驗,測量結果表明直線位置誤差為0.1 m,轉彎誤差則為0.12 m[13]。YOSHISADA等[14]將RTK-DGPS和光纖陀螺應用于水田插秧機的直線跟蹤導航,插秧機在正常作業速度條件下,最大跟蹤誤差小于0.12 m,均方根誤差小于0.055 m。斯坦福大學的MICHAEL O’ Connor等為約翰迪爾7800型拖拉機開發了一套GPS導航系統,在拖拉機駕駛室的上方安裝了4個單通道的GPS傳感器,接收器以10 Hz的頻率進行姿態測量,航向響應小于1°,直線跟蹤標準偏差小于2.5 cm[15]。ZHANG等[16]運用RTK-GPS接收器和光纖陀螺儀,探索了拖拉機自動導航中的動態路徑搜索算法來滿足農業作業的需求。張智剛等[17]將計算機技術、傳感器技術、GPS技術和數據通信技術等集成和融合,在久保田插秧機上開發了基于DGPS和電子羅盤的導航控制系統,提出了一種利用航向跟蹤實現路徑跟蹤的控制方法。羅錫文等[18]將RTK-DGPS定位技術應用于東方紅X-804型拖拉機自動導航,設計開發了可電控的液壓轉向閉環控制回路,將拖拉機運動模型和液壓轉向控制模型相結合,設計了直線跟蹤的PID導航控制器。周建軍等[19]為提高農機車載GPS和DR組合導航系統定位的精度,將模糊邏輯和卡爾曼濾波相結合,研究了模糊自適應卡爾曼濾波算法,在線修正系統量測噪聲協方差陣,在改裝農機車上試驗表明:系統使用模糊自適應卡爾曼濾波后,x方向和y方向平均誤差分別為0.13 m和0.20 m。郭娜等[20]以洋馬VP6型高速插秧機為試驗平臺,對主變速操作、插植操作機構和變速機構進行電控改造,在此基礎上設計了基于GPS導航的田間作業控制系統。
北斗衛星導航系統是中國自主研發的全球衛星導航系統,可在全球范圍內全天候、全天時為用戶提供高精度、高可靠定位導航服務,精度最高可達厘米級。本文采用RTK-BDS定位技術,研究果園噴藥機自動導航系統。設計可電控的氣動轉向閉環控制回路,并進行閉環測試。將噴藥機運動模型和純追蹤模型結合,設計直線跟蹤的導航控制器,通過果園試驗驗證控制系統的精確性和可靠性。
1 自動導航系統
1.1 系統組成
施藥機自動導航系統由RTK-BDS定位傳感器、導航控制器、電控氣動轉向系統、轉向控制器、三軸電子羅盤和施藥機本體等組成,如圖1所示。

圖1 施藥機自動導航系統構成圖Fig.1 Structure sketch of spraying robot navigation system1.車載電臺天線 2.工控機 3.氣泵 4.前小盤天線 5.柱塞泵 6.藥箱 7.噴頭 8.后小盤天線 9.自走式底盤車 10.控制箱 11.氣動三聯件
施藥機由履帶自動式底盤和噴霧系統組成,屬于手動擋汽油機,速度范圍為0.5~6.1 km/h,兩履帶中心距為1 m,長度為1.9 m,通過拉動轉向離合切斷左輪或者右輪脫離運動力主軸,實現履帶車差速轉向。定位傳感器采用華測公司N71J型BDS接收機系統,包括BDS天線、基準站接收機、移動站接收機和數傳電臺組成。該系統采用RTK-BDS定位,水平定位精度可達0.008 m+10-8RMS,垂直定位精度可達0.015 m+10-8RMS,動態延遲小于25 ms。三軸電子羅盤采用PNI公司TCM5型傾角補償3軸電子羅盤,傾斜角精度為0.3°RMS,俯仰角精度為0.2°RMS,橫滾角精度為0.5°RMS,分辨率為0.1°。
1.2 氣動轉向閉環控制系統
氣動轉向閉環控制系統由氣動轉向回路、轉向機構、轉向控制器和三軸電子羅盤組成,屬于閉環系統。
轉向機構主要由2個氣缸、鋼絲繩和左右轉向離合器組成,如圖2所示。氣缸收縮時,拉動鋼絲繩,鋼絲繩拉動轉向離合器,從而控制左或右輪脫離運動力主軸,使該輪停轉,實現施藥機差速轉動。氣缸伸出時,轉向離合器在彈簧作用下復位,使左或右輪與運動主軸嚙合,繼續轉動。氣缸拉動左轉向離合器時,施藥機左轉;反之,施藥機右轉;氣缸同時拉動左右轉向離合器時,施藥機停止運動。

圖2 轉向機構構成圖Fig.2 Structure sketch of steering mechanism1.彈簧 2.右轉向離合 3.鋼絲繩 4.右轉向氣缸 5.左轉向氣缸 6.施藥機機架 7.左轉向離合
氣路系統回路圖如圖3所示,左右換向閥采用二位五通電磁閥,分別控制左右轉向氣缸動作,從而控制噴藥機轉彎方向。比例閥實現流量控制,用于控制履帶轉速,繼而控制施藥機轉向速度快慢。氣泵選用直流雙缸充氣泵,長時間連續工作會導致嚴重發熱甚至燒壞,故選用電接點壓力表和儲氣罐控制氣泵間歇性工作,電接點壓力表壓力上下限分別設置為0.55 MPa和0.2 MPa,儲氣罐容量為6 L,轉向氣缸正常工作要求系統壓力大于0.15 MPa,當系統壓力低于0.2 MPa時氣泵開啟工作,當系統壓力高于0.55 MPa時氣泵停止工作。氣泵停止工作期間系統壓力大于0.2 MPa,滿足轉向氣缸正常工作要求,因此可滿足施藥機持續作業模式。溢流閥起安全保護作用。

圖3 氣動系統回路圖Fig.3 Circuit diagram of pneumatic system1.空氣過濾器 2.儲氣罐 3.消聲器 4.溢流閥 5.氣泵 6.電接點壓力表 7.單向閥 8.減壓閥 9.油霧器 10.右換向閥 11.右電氣比例閥 12.右轉向氣缸 13.左電氣比例閥 14.左換向閥 15.左轉向氣缸
自動轉向原理是施藥機沿著預先設定路徑前進,導航控制器由建立純路徑跟蹤控制算法計算出實時期望轉向角發送給轉向控制器,然后轉向控制器輸出控制信號,通過控制換向閥和比例閥來控制轉向氣缸動作,實現施藥機轉向閉環控制。
轉向控制器在轉向控制過程中使用PID控制算法,如圖4所示,θ1為上位機發送的期望轉向角,θ為施藥機實際轉向角,θ2為電子羅盤測得的轉向角,e為輸入期望轉向角和測得的轉向角之間的偏差。轉向控制器通過分析e,設計控制算法和程序,控制比例換向閥動作,實現電控自動轉向。

圖4 自動轉向閉環控制系統總體結構框圖Fig.4 Structure diagram of closed loop steering control system
考慮到施藥機在果園作業時大部分時間都是直線跟蹤行走,轉向角一般比較小,本文通過一個±10°的階躍響應測試,測得施藥機在2 km/s行進速度下氣動轉向閉環回路的動態響應性能,階躍響應測試結果如圖5所示。由階躍測試結果可知,平均超調量為15.3%,平均峰值時間為0.54 s,轉向閉環控制回路視為二階系統。

圖5 氣動轉向系統的動態響應Fig.5 Dynamic response of pneumatic steering system
1.3 RS232通信
自動導航系統采用RS232進行通信。轉向控制器采用ATmega128單片機,實現航偏角數據采集和轉向控制。導航控制器采用臺達工控機,實現BDS定位數據采集、處理和轉向控制指令決策。系統總體結構如圖6所示。
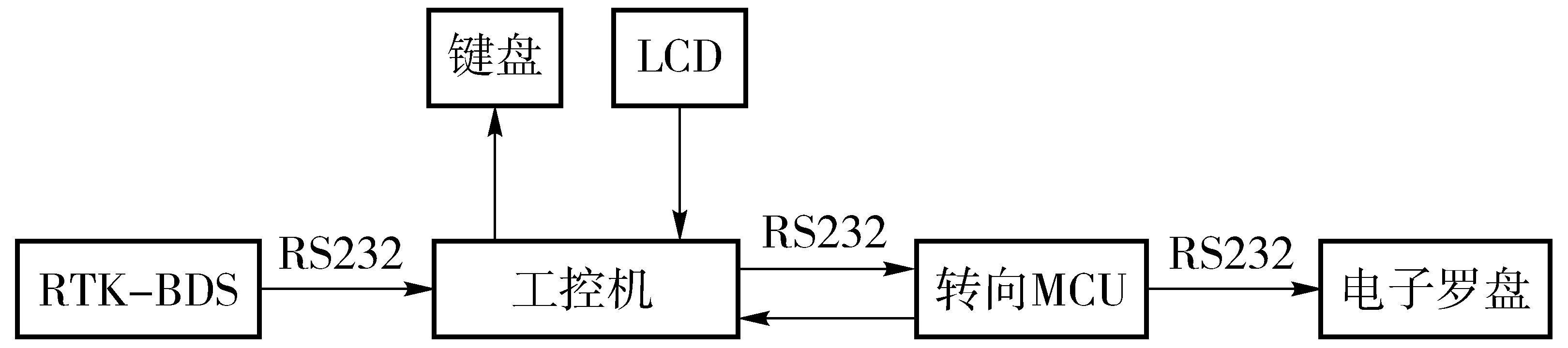
圖6 自動導航系統總體結構框圖Fig.6 Structure diagram of automatic navigation system
1.4 軟件運行流程
在工控機上用LabView搭建人機交互界面,界面用于接收BDS數據和電子羅盤數據,根據路徑跟蹤控制算法計算出期望轉向角并發送給轉向控制器。轉向控制器將接收的期望轉向角與測得實際轉向角比較,根據偏差的大小進行PID控制。定位傳感器發送BDS數據頻率為10 Hz,電子羅盤發送數據頻率為20 Hz,工控機發送期望轉向角頻率為10 Hz。施藥機導航作業軟件運行流程如圖7所示。

圖7 軟件運行流程圖Fig.7 Flow chart of software operation
2 導航控制器設計
2.1 噴藥機運動模型
施藥機底盤是履帶式的,轉向時內側轉向離合器徹底分離,牽引負荷完全由外側履帶承擔。如圖8所示,履帶車不帶負荷在水平地面上以轉彎半徑R繞軸線O作低速穩定轉向,OT是軸線O在水平地面上的投影,C點為履帶車坐標控制點,由于低速離心力可忽略不計,設履帶車角速度為ω,方位角為ψ,方位角定義是北極方向沿順時針方向與施藥機縱軸線前進方向夾角,由運動幾何關系可得
(1)
(2)
式中ψ1——t時刻施藥機的方位角ψ2——t+Δt時刻施藥機的方位角θ——從t時刻到t+Δt時刻施藥機轉向角變化值
R——施藥機轉彎半徑
L——兩履帶中心距
由式(1)關系得到,轉向角變化值等于方位角變化值,因此可以通過檢測方位角來實現轉向角的精準控制。由式(2)可知履帶車的轉彎半徑是一個固定值,通過測量兩履帶中心距L為1 m,可以計算出R為0.5 m。由噴藥機運動模型可知,噴藥機以固定轉彎半徑進行轉向,可以用檢測方位角來對轉向角實現精確控制。

圖8 履帶車轉向運動簡圖Fig.8 Steering motion diagram of tracked vehicle
2.2 純追蹤模型
純追蹤模型是一種基于幾何原理的計算方法,用來計算車輛在運動中從當前位置到目標點走過的弧形軌跡。車輛在以固定角度轉彎時,所走過的軌跡為圓周上的一段弧線,施藥機整個行走軌跡可以看成由無數段圓弧組成,只要確定了不同時間段軌跡弧線的圓心和半徑就可以得到行駛的整個軌跡,這樣就可以通過控制施藥機轉向角來改變行駛軌跡,使車輛沿著預期路徑前進。如圖9所示,施藥機沿著設定軌跡直線AB導航,實際運動軌跡由各弧線段組成,由當前點C(XC,YC) 和方位角ψC可確定當前弧線段的圓心O(XO,YO),由轉彎半徑為0.5 m可求出目標點P(XP,YP),因此Δψ可以求出,再根據式(1)可求出期望方位角ψ2,即期望轉向角值。

圖9 純追蹤模型Fig.9 Model of look-ahead dynamic path search
3 導航路徑規劃
針對果園地形特點及種植模式,結合施藥機轉彎半徑小的特點,設計施藥機器人導航路徑,如圖10所示,帶箭頭軌跡線代表施藥機預設導航路徑,點0為初始位置,點1~5為地頭轉彎點,點A為施藥機器人導航作業時任意一點,點A到預設軌跡的偏距為D,D用于衡量直線跟蹤誤差,D0為施藥機器人作業時不碰到果樹的最大安全距離,施藥機器人正常導航作業時D需小于D0。施藥機在直線段沿著預設路徑導航,到地頭轉彎點時轉彎約90°。

圖10 導航路徑規劃圖Fig.10 Sketch of navigation path planning
4 果園導航試驗
為檢驗施藥機性能和作業效果,在北京市通州區國際種業園櫻桃果園內進行導航試驗,如圖11所示。櫻桃果園種植行間距為5 m,壟長70 m,考慮到櫻桃枝干伸出部分,施藥機器人壟間實際可行走區域寬度約為2.5 m,施藥機器人整體寬度尺寸為1.8 m,因此,施藥機器人不碰到果樹的最大安全距離為0.3 m。選取櫻桃果園連續3壟地作為試驗地,試驗前用采點儀器采集規劃路徑上點0~5的坐標,計算各導航直線段方程,沿著3壟地完成導航,記作1次試驗,施藥機前進速度為1、2、3、4 km/h各做5次試驗,并記錄試驗數據。

圖11 施藥機器人導航試驗現場Fig.11 Navigation test site of spraying robot
施藥機器人在不同前進速度下,5次試驗都能在不撞到果樹的情況下完成導航作業,取前進速度為2 km/h時第1次試驗的導航坐標點數據進行處理,可得到施藥機導航軌跡圖,如圖12所示。

圖12 施藥機導航軌跡Fig.12 Navigation track of spraying machine
對不同前進速度下施藥機行走軌跡上的橫向跟蹤誤差進行統計分析,統計結果如表1所示。橫向跟蹤誤差定義為實時BDS定位坐標點到當前作業行的距離。
從統計結果可以看出,施藥機前進越快,最大直線跟蹤誤差越大。前進速度為2 km/h時為最優速度,轉向速度較快,直線跟蹤誤差較小,此時最大直線跟蹤誤差不超過0.13 m,平均跟蹤誤差不超過0.03 m,這表明所設計的導航控制系統有較高的控制精度和穩定性。施藥機能沿著預設路徑進行直線跟蹤和地頭自動轉彎作業,表明該路徑規劃適用于施藥機導航作業。

表1 橫向跟蹤誤差統計結果Tab.1 Statistical results of offset error
5 結論
(1)使用RTK-BDS接收機實時提供的導航定位數據,采用純追蹤的路徑跟蹤算法,運用PID轉向控制方法,實現了施藥機直線跟蹤導航和地頭轉向控制。
(2)以履帶自走式底盤車為施藥機移動載體,根據履帶車轉向原理設計了電控氣動轉向控制裝置,通過閉環控制實現精準轉彎,氣動裝置提高了轉向機構的響應速度。
(3)果園導航試驗表明,施藥機器人可有效實現果園精準直線導航,并可自主完成地頭自動換壟,在前進速度為2 km/h時,直線跟蹤的最大誤差不大于0.13 m,平均跟蹤誤差不大于0.03 m,滿足果園施藥作業要求。
1 顧家冰,丁為民,邱威,等.果園變量施藥機械及施藥技術研究現狀與趨勢[J].果樹學報,2014,31(6):1154-1157. GU Jiabing, DING Weimin, QIU Wei, et al. Current research situation and development trend of equipment and technology for orchard spraying[J]. Journal of Fruit Science, 2014,31(6):1154-1157. (in Chinese)
2 張海鋒,許林云.果園噴霧機發展現狀及展望[J].中國農機化學報,2014,35(3):112-118. ZHANG Haifeng, XU Linyun. Summary of research status on orchard sprayer[J]. Journal of Chinese Agricultural Mechanization,2013,35(3):112-118. (in Chinese)
3 常有宏,呂曉蘭,藺經,等.我國果園機械化現狀與發展思路[J].中國農機化學報,2013,34(6):21-26. CHANG Youhong, LV Xiaolan, LIN Jing, et al. Present state and thinking about development of orchard mechanization in China[J]. Journal of Chinese Agricultural Mechanizaiton, 2013,34(6):21-26. (in Chinese)
4 慕軍營,戚樹騰,陳軍,等. 自動導航系統在農業中的應用及果園適用性分析[J].農機化研究,2014(7):6-12. MU Junying, QI Shuteng, CHEN Jun, et al. Application of automatic navigztion system in agricultural machinery and the analysis of applicability in orchard[J]. Journal of Agricultural Mechanization Research, 2014(7):6-12. (in Chinese)
5 姬長英,周俊.農業機械導航技術發展分析[J/OL].農業機械學報,2014,45(9):44-54. http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?file_no=20140908&flag=1.DOI=10.6041/j.issn.1000-1298.2014.09.008. JI Changying,ZHOU Jun. Current situation of navigation technologies for agricultural machinery [J/OL].Transactions of the Chinese Society for Agricultural Machinery,2014,45(9):44-54. (in Chinese)
6 李建平,林妙玲.自動導航技術在農業工程中的應用研究進展[J].農業工程學報,2006,22(9):232-236. LI Jianping,LIN Miaoling. Research progress of automatic guidance technologies applied in agricultural engineering [J].Transactions of the CSAE,2006,22(9):232-236. (in Chinese)
7 胡靜濤,高雷,白曉平,等.農業機械自動導航技術研究進展[J].農業工程學報,2015,31(10):1-10. HU Jingtao,GAO Lei,BAI Xiaoping,et al. Review of research on automatic guidance of agricultural vehicles[J]. Transactions of the CSAE,2015,31(10):1-10. (in Chinese)
8 偉利國,張權,顏華,等.XDNZ630型水稻插秧機GPS自動導航系統[J].農業機械學報,2011,42(7):186-190. WEI Liguo,ZHANG Quan,YAN Hua,et al. GPS automatic navigation system design for XDNZ630 rice transplanter [J]. Transactions of the Chinese Society for Agricultural Machinery,2011,42(7):186-190. (in Chinese)
9 周建軍,王秀,張睿,等.農機車載GPS和DR組合導航系統定位方法[J/OL].農業機械學報,2012,43(增刊):262-265.http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?file_no=2012s54&flag=1.DOI:10.6041/j.issn.1000-1298.2012.S0.054. ZHOU Jianjun,WANG Xiu,ZHANG Rui,et al. GPS/DR integrated navigation positioning method for agricultural machinery[J/OL].Transactions of the Chinese Society for Agricultural Machinery,2012,43(Supp.):262-265. (in Chinese)
10 紀朝鳳,劉剛,周建軍,等.基于CAN總線的農業車輛自動導航控制系統[J].農業機械學報,2009,40(增刊):28-32. JI Chaofeng,LIU Gang,ZHOU Jianjun,et al. System of agricultural vehicles based on CAN bus[J].Transactions of the Chinese Society for Agricultural Machinery,2009,40(Supp.):28-32. (in Chinese)
11 周建軍,鄭文剛,李素基,等.基于ISO 11783的拖拉機導航控制系統設計與試[J].農業機械學報,2010,41(4):184-188. ZHOU Jianjun,ZHENG Wengang,LI Suji,et al. Navigation control system for tractor based on ISO 11783[J]. Transactions of the Chinese Society for Agricultural Machinery,2010,41(4):184-188. (in Chinese)
12 張智剛,羅錫文,趙祚喜,等.基于Kalman濾波和純追蹤模型的農業機械導航控制[J].農業機械學報,2009,40(增刊):6-12. ZHANG Zhigang,LUO Xiwen,ZHAO Zuoxi,et al. Trajectory tracking control method based on Kalman filter and pure pursuit model for agricultural vehicle[J].Transactions of the Chinese Society for Agricultural Machinery,2009,40(Supp.):6-12. (in Chinese)
13 TORII T. Research in autonomous agriculture vehicles in Japan [J].Computers and Electronics in Agriculture,2000,25(1-2):133-153.
14 YOSHISADA N,UMEDA N,KANETAI Y,et al. Autonomous guidance for rice transplanting using global positioning and gyroscopes [J].Computers and Electronics in Agriculture,2004,43(3):223-234.
15 REID J F,ZHANG Q,NOGUCHIi N,et al. Agricultural automatic guidance research in North America [J].Computers and Electronics in Agriculture,2000,25(1-2):155-167.
16 ZHANG Q,QIU H. A dynamic path search algorithm for tractor automatic navigation [J].Transactions of the ASAE, 2004,47(2):639-646.
17 張智剛,羅錫文,周志艷,等.久保田插秧機的GPS導航控制系統設計[J].農業機械學報,2006,37(7):95-97,82. ZHANG Zhigang,LUO Xiwen,ZHOU Zhiyan,et al. Design of GPS navigation control system for rice transplanter [J].Transactions of the Chinese Society for Agricultural Machinery,2006,37(7):95-97,82. (in Chinese)
18 羅錫文,張智剛,趙祚喜,等.東方紅X-804拖拉機的DGPS自動導航控制系統[J].農業工程學報,2009,25(11):139-145. LUO Xiwen,ZHANG Zhigang,ZHAO Zuoxi,et al.Design of DGPS navigation control system for Dongfanghong X-804 tractor [J].Transactions of the CSAE,2009,25(11):139-145. (in Chinese)
19 周建軍,王秀,張睿,等.農機車載GPS和DR組合導航系統定位方法[J/OL].農業機械學報,2012,43(增刊):262-265. http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?file_no=2012s54&flag=1.DOI:10.6041/j.issn.1000-1298.2012.S0.054. ZHOU Jianjun,WANG Xiu,ZHANG Rui,et al. GPS /DR integrated navigation positioning method for agricultural Machinery [J].Transactions of the Chinese Society for Agricultural Machinery,2012,43(Supp.):262-265. (in Chinese)
20 郭娜,胡靜濤,王鶴.基于GPS導航的插秧機作業控制系統[J/OL].農業機械學報,2013,44(1):200-204. http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?file_no=20130138&flag=1.DOI:10.6041/j.issn.1000-1298.2013.01.038. GUO Na,HU Jingtao,WANG He. Intelligent operation control system for rice transplanter based on GPS navigation [J/OL]. Transactions of the Chinese Society for Agricultural Machinery,2013,44(1):200-204. (in Chinese)
Navigation Control System for Orchard Spraying Machine Based on Beidou Navigation Satellite System
XIONG Bin ZHANG Junxiong QU Feng FAN Zhiqi WANG Dashuai LI Wei
(CollegeofEngineering,ChinaAgriculturalUniversity,Beijing100083,China)
According to the demand of automatic navigation of orchard spraying machine, a navigation control system for spraying robot based on Beidou navigation satellite system(BDS)was designed. The system included RTK-BDS receiver, navigation controller, steering controller, electro pneumatic steering system, three dimensional electronic compass. The closed control loop of steering angle was composed of steering controller, electro pneumatic steering system, three dimensional electronic compass. The closed loop could realize the servo control of steering angle according to control command from navigation controller. The kinematics and dynamics models of spraying machine were analyzed and a look-ahead dynamic path search model was established. The input of the look-ahead dynamic path search model was lateral tracking error and the output was steering angle from navigation controller. Navigation path planning on the spraying machine was designed according to the characteristics of the orchard, and field tests were carried out in the orchard. The tests were done at different traveling speeds, which showed the offset error became bigger with the increase of traveling speed and the traveling speed of 2 km/h was the optimal speed for quick steering speed and small offset error. The field tests showed that the maximum offset error was no more than 0.13 m and the average offset error was no more than 0.03 m for straight tracking at the traveling speed of 2 km/h. The field tests indicated that the navigation control method was appropriated to orchard spraying machine.
orchard; spraying machine; automatic guidance; control system; Beidou navigation satellite system
10.6041/j.issn.1000-1298.2017.02.006
2016-09-24
2016-11-27
國家高技術研究發展計劃(863計劃)項目(2012AA041507)和“十二五”國家科技支撐計劃項目(2015BAD23B02)
熊斌(1989—),男,博士生,主要從事智能農業機械裝備研究,E-mail: 815149730@qq.com
張俊雄(1979—),男,副教授,博士生導師,主要從事機械制造、機器視覺及農業機器人技術研究,E-mail: cau2007@cau.edu.cn
S219.3; TP242
A
1000-1298(2017)02-0045-06
猜你喜歡
小主人報(2022年1期)2022-08-10 08:28:44
新作文·小學低年級版(2021年9期)2021-11-27 07:57:46
學生天地(2020年17期)2020-08-25 09:28:54
作文成功之路·小學版(2020年7期)2020-08-24 08:19:30
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
作文成功之路·小學版(2020年7期)2020-01-02 10:10:44
趣味(數學)(2018年12期)2018-12-29 11:24:10
小學生作文(中高年級適用)(2017年10期)2017-11-13 06:01:00
能源(2016年2期)2016-12-01 05:10:46
故事大王(2016年7期)2016-09-22 17:30:08