改進PID的無人機飛行姿態角控制消顫算法*
2017-03-02 07:06:26陸興華詹世尉余文權黃臣煒
傳感器與微系統 2017年3期
陸興華, 詹世尉, 余文權, 黃臣煒
(廣東工業大學 華立學院,廣東 廣州 511325)
計算與測試
改進PID的無人機飛行姿態角控制消顫算法*
陸興華, 詹世尉, 余文權, 黃臣煒
(廣東工業大學 華立學院,廣東 廣州 511325)
無人機在整個縱平面飛行過程中,由于飛行姿態角的大幅度變化以及氣流的作用,導致機身顫抖,影響飛行穩定性。提出一種基于PID變結構控制的無人機飛行姿態角控制消顫算法,首先進行了無人機飛行姿態角控制系統的被控對象參量分析,構建無人機在姿態角變化劇烈、大迎角飛行時的三通道模型,采用變結構控制方法進行控制器設計。結合小擾動原理和Lyapunov穩定性原理進行擾動抑制和穩定性證明,采用梯度算法調整權值進行飛行姿態角控制的消顫處理,采用自適應算法在線調整權值實現PID變結構控制改進。仿真結果表明:采用該算法進行無人機飛行姿態角控制和消顫處理,大幅度提高無人機飛行定姿的精度,橫滾角、俯仰角和航向角的控制精度有較大提高,穩定性和收斂性較好,確保了無人機飛行穩定性。
無人機; 神經網絡; 變結構控制; 姿態角
0 引 言
無人機(unmanned aerial vehicle,UAV)的穩定性飛行控制一直是制約無人機發展的一個重要瓶頸技術,無人機的氣動特性具有靜不穩定性,在整個縱向平面飛行過程中,受到大氣密度和空氣流動等飛行條件的不斷變化的影響,導致無人機不能穩定飛行,引起機身顫抖和擾動,較小的機身顫抖和擾動都會引起無人機的橫滾和姿態偏移,甚至導致飛行穩定性失衡,引起墜機事故。因此,研究無人機的飛行姿態角控制和消顫方法,在保障無人機飛行穩定中具有重要的意義[1]。
在無人機的飛行姿態角控制系統設計中,最關鍵的技術是構建無人機動力平衡數學控制模型[2,3]。采用變結構自適應理論在姿態控制系統設計中的具有一定的可行性,對此,文獻[4]提出一種基于不確定邊界的自適應神經網絡控制的飛行器的姿態角慣導控制方法,進行了采用簡化模型的變結構自適應控制器設計,提高了飛行器的控制精度,但是該方法在飛行器進行大幅度縱向提升過程中的控制性能不好,誤差較大[5]。PID神經網絡控制算法將靜態神經元擴充到動態神經元,在無人機飛行控制中具有結構簡單,實時性好等優點[6]。
本文在傳統的PID控制方法的基礎上,針對傳統方法無法使被控對象得到有效的干擾抑制和顫抖補償的問題,進行了控制算法改進設計,提出一種基于PID變結構控制的無人機飛行姿態角控制消顫算法,仿真實驗驗證,方法具有很好的適應性,而且可以保證很高的控制精度。
1 無人機飛行姿態控制對象描述和參量分析
1.1 被控對象描述
無人機姿態控制具有運動參數的時變性、參數及擾動的隨機變化性、控制對象及設備的嚴重非線性以及彈性振動等特性,上述飛行姿態特點可能導致無人機在飛行過程中出現顫抖和大幅度擾動,對飛行安全帶來隱患。對此,需要進行無人機的飛行姿態控制,在無人機飛行姿態角控制過程中,整個飛行段選取不同的特征點并得到相應點的線性時不變對象模型,構建確定性模型描述無人機飛行的被控對象,進行控制對象的參量構建和描述,無人機飛行姿態角的控制參量主要包括了確定性參量和不確定性參量兩大部分[7~10]。不確定量主要包括參數的不確定性和外界的擾動,根據上述分析,構建無人機在姿態角變化劇烈、大迎角飛行時的三通道模型表述為
(1)

(2)

(3)

(4)

(5)
在上述被控對象參量分析的基礎上,進行無人機飛行姿態角控制的運動分析和控制器設計。
1.2 無人機飛行姿態角控制的定常運動分析
通過對無人機飛行姿態角控制的定常運動分析,進行控制器優化設計,無人機飛行控制是一個封閉的控制系統,由縱向定常運動分析,構建無人機的縱向運動方程。
M=Mn+ΔM
(6)
(7)

(8)
其中
(9)


(10)
在上界已知的情況下,進行飛行姿態角的控制器設計。
2 控制器設計和消顫算法改進設計
2.1 上界已知時無人機飛行姿態角控制變結構控制器
無人機飛行控制系統是一個多變量、非線性、強耦合系統,采用變結構方法設計的姿態控制系統比采用經典理論設計的姿態控制系統具有更強的魯棒性和較高的精確度,對此,采用變結構控制方法進行控制器設計,在縱向定常運動上界已知的情況下,令
(11)
當不考慮無人機飛行姿態角控制系統的不確定因素時,得到所有魯棒PID控制器參數集,得到俯仰角跟蹤控制的誤差向量形式為
(12)
通過上述方程聯立,求得無人機飛行控制的角速度的跟蹤誤差,此時將幾何控制域中的滑模面定義為
s=ce1+e2
(13)
則
(14)
令

(15)
考慮系統存在不確定因素,在實際的無人機飛行彈道中,計算縱向運動參數和橫舵角的非線性函數,得到姿態平衡到達律為
(16)
則總的量為
u=ueq+u0
(17)
根據上述描述,實現無人機飛行姿態角控制器設計。
2.2 基于變結構PID的消顫算法改進
在上述進行控制器設計的基礎上,采用一種基于PID變結構控制的無人機飛行姿態角控制消顫算法實現對干擾抑制和無人機的機身顫抖補償,本文設計的變結構PID神經網絡控制器采用的是三層前向神經元網絡,為2×3×1結構,結合上述的控制器設計,采用梯度算法調整權值進行機身消顫處理,無人機在受到擾動下的定常俯仰跟蹤角度在PID神經網絡的輸出為
(18)
此時,變結構PID神經元的狀態uj由線性方程組的擾動參量決定。在神經網絡中采用自變量進行自適應學習,按其狀態函數可得控制參量的基礎輸出,即
uj(k+1)=g(netj-θj,uj(k))
(19)
式中 θj為神經元的誤差曲面,本文在無人機飛行控制中均設閾值為零。神經網絡控制系統的輸出層神經元的輸出函數與線性化的小擾動特征輸出相同,輸出為
(20)
根據小擾動原理,得到無人機飛行中的PID神經網絡的輸出v(k)與基準運動狀態有關,即
v(k)=x″(k)
(21)


(22)

(23)
式中 ∫(·)dt為多變量控制系統的積分器,在無人機飛行姿態角控制中為一個與推力矩相平衡的限幅參量,而d(·)是微分符號。通過上述分析得知,本文設計的改進的PID變結構自適應學習無人機飛行姿態角控制系統是穩定的,系統的穩定性得證。
3 仿真分析

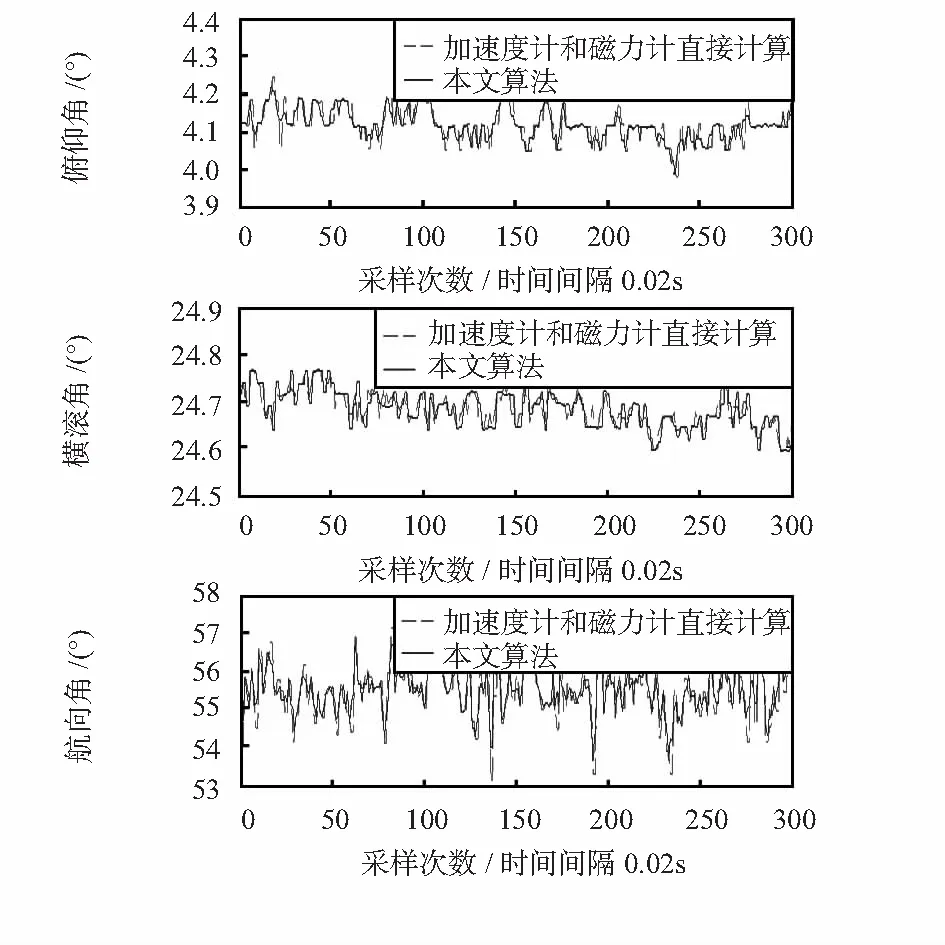
圖1 無人機飛行姿態角比較
從圖1可見,采用本文方法進行無人機飛行姿態控制,姿態角控制效果的非常平滑,有效避免了擾動干擾,零點漂移幾乎為零,控制系統的穩定性較好,效果比傳統的計算方法提高了定姿的精度。分析仿真結果得出,采用本文設計的控制器能夠在很短的時間內將無人機的姿態角誤差調整到零,對參數變化及隨機干擾具有很好的適應性,通過本文的消顫處理,有效提高了飛行姿態角的穩定性,擾動干擾得到有效控制。而采用傳統控制方法由于沒有進行消顫處理,導致姿態角輸出不穩定。在相同實驗參數下,采用不同算法得到無人機飛行控制的姿態角最大誤差、平均誤差和均方差結果見表1。分析表中結果可見,采用本文控制方法,能大幅度提高無人機飛行定姿的精度,橫滾角較傳統的兩種方法分別提高了60 %,42 %,俯仰角提高了46 %,27 %,航向角精度提高64 %,50 %,在無人機飛行姿態穩定性控制中具有較好優勢。

表1 不同算法姿態控制誤差結果統計
4 結束語
本文以無人機三通道姿態運動的動力學模型為被控對象,在不確定上界已知的情況下,進行了無人機飛行姿態角的變結構PID改進控制器設計,通過Lyapunov穩定性理論進行了控制器的穩定性證明。采用自適應算法在線調整權值實現對無人機的消顫控制和小擾動抑制處理,研究結果表明:采用本文方法進行無人機飛行姿態角控制和消顫設計,能夠在很短的時間內將無人機的姿態角誤差調整到零,大幅度提高無人機飛行定姿的精度,有效保證了飛行穩定性。
[1] Feyzmahdavian H R,Charalambous T,Johansson M.Exponential stability of homogeneous positive systems of degree one with time-varying delays[J].IEEE Transactions on Automatic Control,2014,59(6):1594-1599.
[2] Zhang J F,Han Z Z,Wu H.Robust finite-time stability and stabilization of switched positive systems[J].IET Control Theory and Applications,2014,8(1):67-75.
[3] Ngoc P H A.Stability of positive differential systems with dela-y[J].IEEE Transactions on Automatic Control,2013,58(1):203-209.
[4] Xiang M,Xiang Z R,Karimi H R.Stabilization of positive switched systems with time-varying delays under asynchronous swit-ching[J].International Journal of Control,Automation and Systems,2014,12(5):939-947.
[5] 章 俊,張冬梅,王辛剛.一類參數不確定連續正系統受限控制[J].信息與控制,2015,44(5):592-597,603.
[6] 朱 熠, 陳 欣, 李春濤,等.風擾動下的飛翼無人機靜態投影控制[J].兵工學報,2015,36(7):1237-1246.
[7] 雷旭升,陶 冶.小型無人飛行器風場擾動自適應控制方法[J].航空學報,2010,31(6):1171-1176.
[8] 張明廉.飛行控制系統[M].北京:北京航空航天大學出版社,2006.
[9] 劉 重, 高曉光, 符小衛,等.基于反步法和非線性動態逆的無人機三維航路跟蹤制導控制[J].兵工學報,2014,35(12):2030-2040.
[10] 呂 品,賴際舟,劉建業,等.飛行器氣動模型輔助導航方法的研究概況與進展[J].控制與決策,2015,30(12):2113-2120.
[11] 楊天雨,賈文峰,賴際舟,等.慣性/光流/磁組合導航技術在四旋翼飛行器中的應用[J].傳感器與微系統,2016,35(1):156-160.
Flight attitude angle control and anti-chatter algorithm for UAV based on improved PID*
LU Xing-hua, ZHAN Shi-wei, YU Wen-quan, HUANG Chen-wei
(Huali College,Guangdong University of Technology,Guangzhou 511325, China)
Aiming at problem that UAV in the whole longitudinal plane flight process,due to the large range of flight attitude angle and the effect of air flow,resulting in trembling,affecting flight stability,present a control and anti-chatter algorithm for UAV flight attitude angle based on PID variable structure control.Parametric analysis on controlled object of flight attitude angle control system is carried out. Three-channel model for UAV in dramatic change of attitude angle, large angle of attack flight,controller is designed with variable structure control method.The disturbance rejection and stability are proved by small perturbation theory and Lyapunov stability theory.Gradient algorithm is used to adjust weights for anti-chatter processing by flight attitude angle control.The adaptive algorithm is used to online adjust the weights to realize improvement of PID variable structure control.The simulation results show that using this algorithm to control attitude angle of UAV and realize anti-chatter,precision of UAV flight attitude is greatly improved,the control precision of roll angle,pitch angle and heading angle is greatly improved,stability and convergence are good, which ensure flight stability of UAV.
unmanned aerial vehicle(UAV); neural network; variable structure control; attitude angle
10.13873/J.1000—9787(2017)03—0116—04
2016—03—31
2015年廣東省教育廳重點平臺及科研項目青年創新人才類項目(自然科學類)(2015KQNCX218); 2016年廣東省大學生科技創新培育項目(pdjh2016b0940)
TP 273
A
1000—9787(2017)03—0116—04
陸興華(1981-),男,碩士,講師,主要從事計算機控制算法、人工智能等研究工作。
猜你喜歡
哲學評論(2021年2期)2021-08-22 01:53:34
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
中華詩詞(2019年7期)2019-11-25 01:43:04
模具制造(2019年3期)2019-06-06 02:10:54
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
影視與戲劇評論(2016年0期)2016-11-23 05:26:01
現代企業(2015年9期)2015-02-28 18:56:50
