基于MotoSim EG的安川機器人虛擬示教仿真
2017-03-04 06:08:52錢玉劍張愛紅陳星星
無錫職業技術學院學報 2017年1期
錢玉劍 張愛紅 陳星星
基于MotoSim EG的安川機器人虛擬示教仿真
錢玉劍 張愛紅 陳星星
近年來,隨著人工成本逐年增高,機器人在工業中的應用越來越廣泛,諸如:噴涂、碼垛、搬運、包裝、焊接、裝配等,普遍采用示教編程方法[1]。隨著虛擬現實技術的快速發展,計算機仿真已成為網絡制造的重要手段。國外知名機器人廠商,諸如ABB、FANUC、YASKAWA、KUKA等都推出了Windows 平臺上使用 3D 技術開發的機器人仿真軟件。文中以MOTOMAN機器人的零件碼垛搬運為例,給出了應用MotoSim EG軟件實現安川機器人虛擬示教的過程。在機器人環境物建模的基礎上,實現了對機器人工件搬運操作的示教編程,基于此生成了INFORM III程序格式的代碼并下載至機器人控制器,最終經過機器人再現操作驗證了虛擬仿真建模的精度與虛擬示教的可行性。
1 機器人及其環境物建模
機器人本體、安裝地面等模型是MotoSim EG軟件自帶的,可以直接導入,因此構建工作臺與工件等環境物模型是離線仿真編程的關鍵。值得注意的是建立的模型需與實際環境物的外形尺寸、安裝位置等完全一致,否則會因精度偏差等問題而不能進行工件的準確移位。本次建模的對象為MOTOMAN HP20機器人、帶夾具的工件以及六工位緩沖臺等,建模實物對象如圖1所示。

圖1 安川機器人與緩沖工作臺實物
1.1 建立仿真工作單元
在機器人及其環境物建模前,需先新建一個虛擬仿真的工作單元,工作單元是機器人與環境物模型構建的基礎。工作單元按照下述步驟建立:
(1)單擊{開始}菜單→{MotoSim EG}→{File}→{New Cel Project}選擇所要保存的計算機路徑;(2)彈出New Cel對話框,新建一項目,文件類型是Cel File(*.cel)。單元文件、參數數據、模型數據、作業數據等均存放在該文件夾內。
1.2 導入機器人模型

1.3 添加地面

1.4 顯示機器人的法蘭端
默認情況下,在新建的仿真單元中不會顯示機器人法蘭端的坐標系,需要通過用戶設置,具體操作步驟如下:單擊菜單{Setting}→{Options}→{Graphic}→{Show},分別在Resolution中填入32~256之間的數字,在Blurrin中填入1~6之間的數字;點擊Execute,在Duratio中填入0.01~9.99之間的數字;接著設置Frame Lenght,為了能夠清楚地顯示坐標系,在其中填入一個較大的數字200。經過以上操作構建機器人仿真工作單元如圖2所示。
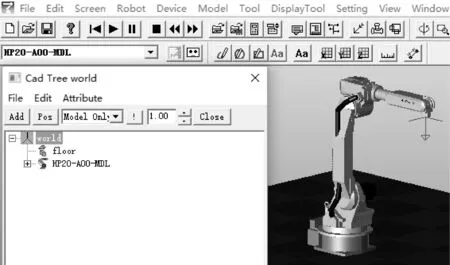
圖2 機器人仿真工作單元的創建
1.5 構建周圍環境物模型
1.5.1 底座的建立
機器人與地面之間有一個底座,需經測量得到外形尺寸和位置關系后再建立模型。單擊樹形圖中的{world}→{Add},彈出創建模型對話框,取名為{base},單擊確定后在樹形圖中出現base節點。雙擊base節點,彈出“Add Parts”的數據編輯對話框。在Add Parts處下拉菜單選擇{BOX}→{Add}彈出{BOX Edit}的對話框,設置底座的尺寸,單擊{Color}可以選擇底座的顏色。
1.5.2 工作臺的建立
1.5.3 工件的建立
根據實際中工件尺寸創建工件,依次點擊{world}→{stand}→{Add},給工件1取名為workpiece1,在workpiece1的數據編輯對話框中添加圓柱(CYLINDER),尺寸數據設置為U100,L100,Height100,位置坐標為X1234,Y-500,Z841。根據工作環境的要求共需創建6個尺寸形狀相同的圓柱形工件,完成工件1的創建后,工件2~工件6的模型尺寸不變,僅需更改Y方向的位置,其構建過程限于篇幅,不再贅述。創建完成的工作環境模型如圖3所示。
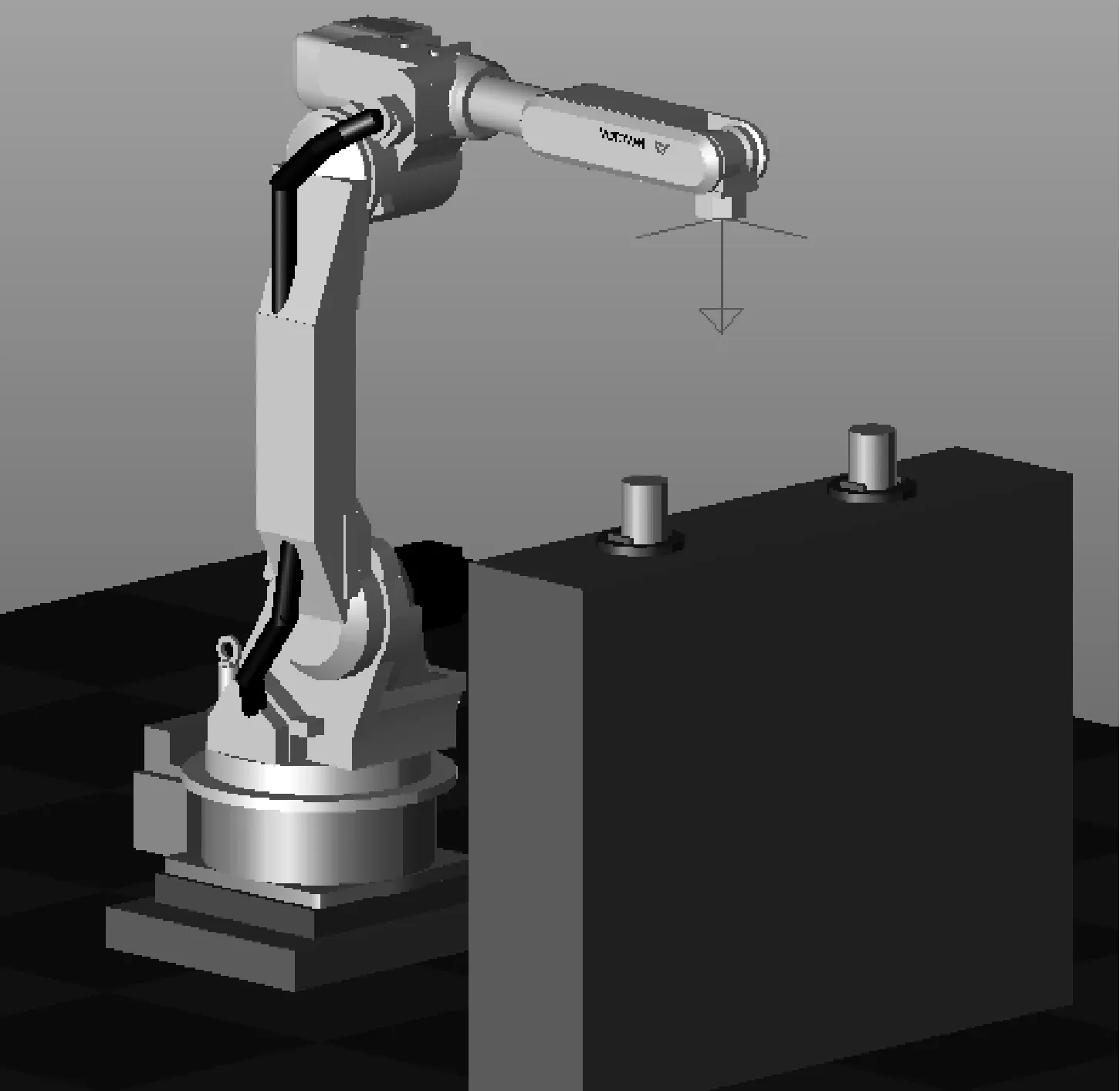
圖3 包含工作臺與工件的仿真工作單元
1.5.4 創建機器人手爪
MotoSim EG軟件自帶的工具模型較少,僅包含用于弧焊的焊槍模型,一般情況下難以滿足實際工作的需要,因此用戶需根據實際應用進行工具建模,本應用創建用于工件取放的氣動手爪。在手爪部分建模的過程中,先應將光標定位到機器人樹形圖的刀尖點(HP20-A00-MDL_tcp)處,然后再構建機器人手爪模型grasp。
1.5.5 調整TCP工具中心點的位置
機器人的TCP點是機器人法蘭盤端面中心的一點,工具坐標系原點的缺省位置就在法蘭盤端面中心點。為了實際操作的方便,需要重新調整機器人的TCP點,將其移至手爪前端面的中心,如圖4所示。具體操作如下:點擊菜單{Robot}→{Data Setting}→{Tool Data…}出現工具編輯對話框后,修改工具坐標偏置值。但調整時又發現:機器人手爪模型會隨著TCP點移動而移動,為此需將光標定位到Cad樹形圖中手爪模型處對其位置再作適當調整,經重新設定后滿足要求。
圖4 調整TCP后的機器人及工作臺
2 機器人虛擬示教與再現
2.1 虛擬示教編程

工件取放的應用實例由7個程序動作歩構成,其中第1歩的開始位置與第7歩的結束位置為同一位置,例程如下:
NOP
MOVL V=200.0 ‘第1步
MOVL V=70.0 ‘第2步
DOUT OT#(17) OFF ‘抓取工件
DOUT OT#(18) ON
TIMER T=1.0 ‘延時1秒
…
DOUT OT#(17) ON ‘放置工件
DOUT OT#(18) OFF
…
MOVL V=200.0 ‘第7步
END2.2 程序導入
經MotoSim EG軟件生成的示教程序經虛擬仿真驗證無誤后方可導入到現場機器人控制器。由于虛擬示教生成的程序存于計算機上,需先在計算機上找到創建的作業文件(.JBI),再利用讀卡器將程序復制到CF卡內。應用CF卡將程序導入機器人控制器的具體操作詳見文獻[4]。
2.3 程序調試運行
程序導入至機器人控制器后應選擇在“示教”模式下進行調試運行。機器人動作期間需觀察抓取點與放置點是否準確,若發現位置存在偏差需進行微調。程序逐段調試無誤后將模式切換至“再現”,伺服上電后按啟動鍵,程序將自動運行。在運行過程中若發生意外情況需立即按下急停按鈕以停止機器人的動作,直至故障排除后再重新啟動。
3 結論
應用MotoSim EG軟件成功對無錫職業技術學院智能工廠MOTOMAN機器人及其環境物進行了虛擬示教仿真,應用實踐表明:虛擬示教仿真可以減少機器人的停機時間,為機器人系統調試人員提供了一個較好的實驗平臺,同時也為機器人自動生產線方案設計等提供了一個新思路。
[1] 張愛紅,張秋菊.機器人示教編程方法[J].組合機床與自動化加工技術,2003(4):47-49.
[2] 陜軍峰.機器人碼垛離線仿真與遠程控制技術研究[J]. 組合機床與自動化加工技術,2011(4):70-73.
[3] 姚貴昌.基于Roboguide平臺的FANUC機器人虛擬現實技術在工業生產中的應用[J].機械工程師,2014(1):60-62.
[4] 張愛紅.工業機器人應用與編程技術[M].北京:電子工業出版社,2015:128-136.
責任編輯 陳桂梅
(無錫職業技術學院 控制技術學院, 江蘇 無錫 214121)
工業機器人的示教分為在線示教與虛擬示教兩種,文中給出了應用MotoSim EG軟件實現安川工業機器人的虛擬示教過程。在機器人及其環境物建模的基礎上,完成了機器人工件搬運的示教與編程,進而生成了INFORM III格式的機器人程序代碼,通過將程序下載至機器人控制器,驗證了虛擬仿真建模的精度與示教程序的可行性。實踐應用表明:應用仿真軟件能達到預期效果,與現場操作相比具有直觀安全、成本低、效率高等優點。
工業機器人; 虛擬示教; 仿真建模
Yaskawa Robot Virtual Teaching Simulation Based on MotoSim EG
QIANYujian,ZHANGAihong,CHENXingxing
(School of Control Technology, Wuxi Institute of Technology,Wuxi 214121,China)
Industrial robot teaching is divided into two kinds of style. They are online teaching and virtual teaching. The virtual teaching on Yaskawa industrial robot with MotoSim EG is provided in this article. Based on the surroundings of the robot, virtual teaching and programming are handling robot working pieces. Then robot codes with INFORM III format are generated and downloaded by the robot controller. This is used to verify the accuracy of the virtual modeling and evaluate the feasibility of the process. Practice shows that the application of simulation software can achieve the Expected results. It is more intuitive, safer, cheaper and higher efficient than site operation.
industrial robot; virtual teaching; simulation modeling
10.13750/j.cnki.issn.1671-7880.2017.01.013
2016-10-07
2016年江蘇省高等學校大學生創新創業訓練計劃項目“工業機器人虛擬仿真與離線編程”(201610848004Y)
張愛紅(1971— ),男,江蘇鹽城人,教授,研究方向:機電一體化技術,智能制造新技術。
TP 242
A
1671-7880(2017)01-0047-03
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
人大建設(2019年12期)2019-05-21 02:55:44
中山大學法律評論(2018年1期)2018-03-30 01:21:00
瞭望東方周刊(2017年42期)2017-12-05 18:49:38
環球時報(2017-03-30)2017-03-30 06:44:45
光學精密工程(2016年6期)2016-11-07 09:07:19
中國衛生(2015年3期)2015-11-19 02:53:32
核科學與工程(2015年4期)2015-09-26 11:59:03