CORS多系統定位精度分析
2017-03-07 10:18:29管明雷伏天淑平海波王英剛
導航定位學報 2017年1期
管明雷,伏天淑,平海波,王英剛,周 立
(1.淮海工學院,江蘇 連云港 222005;2.江海測繪院有限公司,江蘇 南通 226000)
CORS多系統定位精度分析
管明雷1,伏天淑1,平海波2,王英剛1,周 立1
(1.淮海工學院,江蘇 連云港 222005;2.江海測繪院有限公司,江蘇 南通 226000)
為了提高多系統CORS的精度,對GPS、GLONASS、BDS 3系統兼容的CORS站觀測數據進行了測試:利用靜態已知點對各個系統進行組合差分信號差分定位,同時利用移動平均值法對觀測數據空間精度進行分析,并對比分析各種組合的觀測數據。結果表明:兼容GPS/GLONASS /BDS的三星差分信號數據與GPS/GLONASS和GPS/BDS雙星差分信號數據的精度相當,比GPS單星差分信號數據精度在X、Y方向上提高了1 cm左右,Z方向上提高了1~2 cm。
CORS;定位精度;多系統差分
0 引言
隨著全球衛星導航系統(global navigation satellite systems,GNSS)技術與信息技術的融合與發展,孕育出了2者集成的新技術——GNSS連續運行參考站(continuously operating reference stations,CORS)。目前,我國常用的衛星導航系統主要有美國的全球定位系統(global positioning system,GPS)、俄羅斯的格洛納斯衛星導航系統(global navigation satellite system,GLONASS)和我國的北斗衛星導航系統(BeiDou navigation satellite system,BDS)。CORS系統是在一定區域布設若干個GNSS連續運行基站,對該區域GNSS定位誤差進行整體建模,通過網絡無線數據通訊技術向移動用戶端播發實時位置增強信息,將用戶終端的定位精度從3~10 m提高到2~10 cm,且具有定位精度分布均勻、實時性高和穩定性強等特點。隨著CORS技術的不斷發展,CORS基站目前已經實現了兼容GPS/GLONASS/BDS 3個系統,并且能提供B1、B2、B3 3個頻率的BDS數據,極大地提高了CORS系統穩定性和差分數據的準確性。目前,我國各省份所建立的CORS系統,主要有接收GPS系統單星CORS、兼容GPS和GLONAS的雙星CORS、兼容GPS/BDS的雙星CORS和兼容GPS/GLONASS/BDS的三星CORS。
本文利用現有設備對上述4種差分信號進行實時動態(real time kinematic,RTK)載波相位差分定位,分析對比4種差分信號的精度、穩定性和可靠性。
1 測試方法
CORS的精度直接決定了用戶使用參考站觀測數據進行靜態基線質量解算、實時網絡RTK和實時偽距差分(real time differential,RTD)作業的測量精度。系統的精度能否滿足用戶在測繪等作業過程中的精度需求是評價系統建設的最直接指標。CORS精度的測試包括利用參考站的觀測數據進行靜態基線解算的精度測試和利用系統內插的實時差分改正數進行動態實時測量的點位精度測試。常用的CORS精度檢測方法有:已知點檢測法、后處理結果比較法、動態規則幾何軌跡檢測法和反算基線長度法等方法。利用已知點進行CORS精度的檢測是目前CORS系統精度檢測中最為常用也是最容易實現的方法之一,其檢測的結果也最具有客觀性,能夠真實反映出系統的整體精度。
靜態檢測的方法是CORS系統精度檢測中最常用的方法。其主要過程是:在CORS系統所覆蓋的區域內,選擇具有代表性的、坐標精確已知的檢測點,將動態用戶接收機架設在已知點上進行實時定位,并文件記錄結果;然后對實時定位結果進行統計分析,得到在檢測點實時定位的內、外符合精度。靜態已知點檢測方法有不少劣勢:1)若測區范圍內沒有已知點,該檢測方法就無法使用,其應用范圍有局限性[2];2)靜態已知點檢測方法是在靜態模式下進行的,不能完全反映流動站在移動時的定位精度;3)測區范圍內外界條件可能各不相同,不能正確反映測區各個地方的情況。
本文采用已知點檢測法來比較CORS多系統的精度;同時利用移動平均法來對CORS多系統的組合進行比較分析,以彌補靜態已知點檢測方法的不足。
2 實例分析
2.1 測區情況與靜態已知點檢驗法過程介紹
淮海工學院CORS系統兼容了GPS/GLONASS/BDS系統。系統由3個連續運行的 GNSS 參考站、數據通信網絡系統、1個數據處理及控制中心和流動站用戶4部分組成。系統分別能夠輸出4種差分信號,分別是單GPS差分信號、GPS/GLONASS組合的差分信號、GPS/BDS組合的差分信號和GPS/GLONASS/BDS組合的差分信號。測區分布了一個空間直角坐標系的已知點。
在實驗過程中,選擇1個具有代表性的已知點,使其位于樓頂開闊場地,截止高度角不超過10°,該已知點的坐標系為空間直角坐標系。本次實驗使用的移動站接收機儀器是南方S86,檢測的方法是多歷元靜態已知點檢測方法。在已知點上架設南方S86接收機,分別接入4種CORS-RTK差分信號觀測1個時段,數據采樣時間間隔5 s,連續觀測一段時間后,記錄一組測量數據。
2.2 數據處理分析2.2.1 CORS-RTK系統內符合精度測試
內符合精度用來評定CORS差分定位的穩定性程度,其數學方法是計算每一測點所有測量值的算術平均值,再將求得的算術平均值與每個測量值求差,然后分別統計出X、Y和Z的3個方向上的差值分布情況。內符合精度值越小表示CORS-RTK定位的穩定性越高。表1、表2、圖1表示出了內符合精度的測試結果。
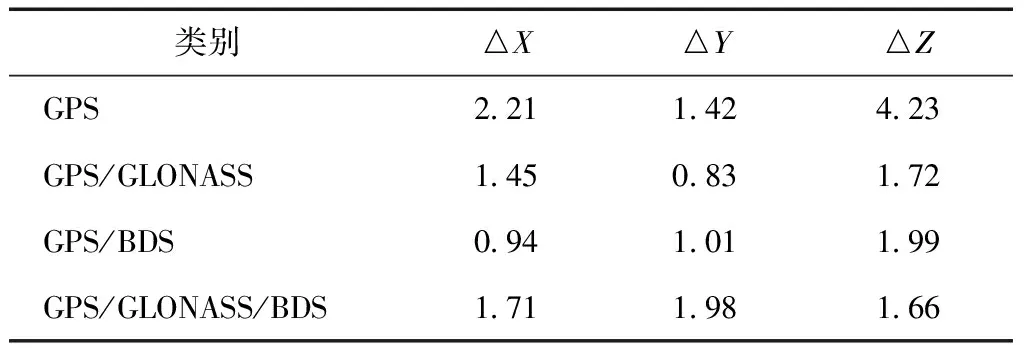
表1 內符合精度的最大值 cm
表1中最大值對比發現:內符合精度在X、Y方向上主要集中于0.9~0.22 cm;Z方向上集中于0.15~0.29 cm;其中GPS差分信號在3個方向上差值最大值都是最大的,其他3組組合系統差分信號差別不大。同時也發現內符合精度在平面坐標系中GPS/BDS/GLONASS 3系統組合的差分信號略差于GPS/BDS和GPS/GLONASS所形成的雙系統差分信號。
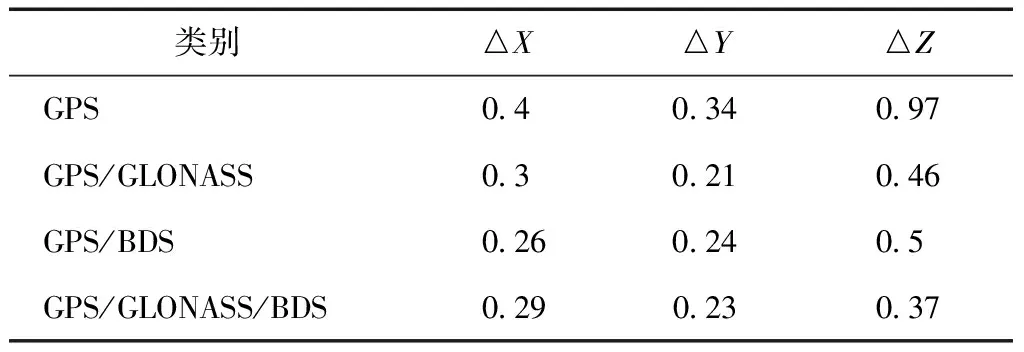
表2 內符合精度的平均值 cm
表2中平均值對比發現:內符合精度在X、Y方向上主要集中在0.2~0.4 cm;Z方向上主要集中在0.35~0.86 cm;其中GPS差分信號在3個方向上差值最大值都是最大的,其他3組組合系統差分信號差別不大。
從表1、表2和圖1可知,GPS/BDS/GLONASS組合差分信號內符合精度最好,GPS/BDS和GPS/GLONASS組合其次,單GPS差分信號最差。
2.2.2 CORS-RTK系統外符合精度測試
CORS-RTK的外符合精度反映了系統定位的準確性。其定義為:在己知測試點上,通過轉換參數,實測得出當地坐標系下的坐標成果,與該測試點的己知坐標成果相比較,即可得出在X、Y、Z方向上的外符合精度分布情況。表3、表4、圖2表示出了外符合精度的測試結果。
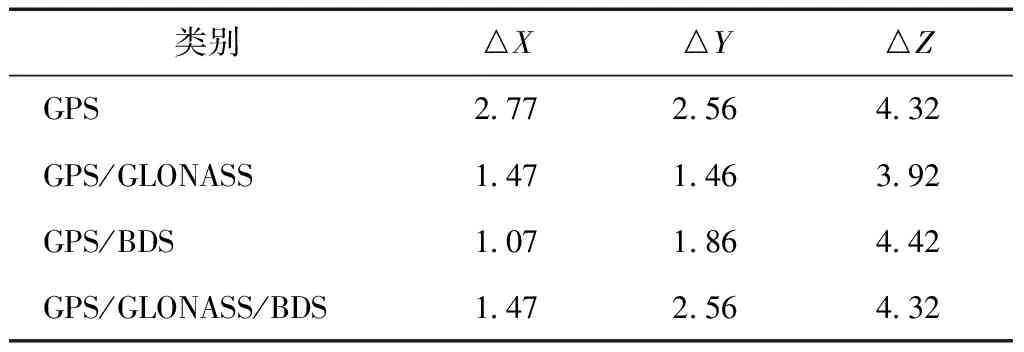
表3 外符合精度最大值 cm
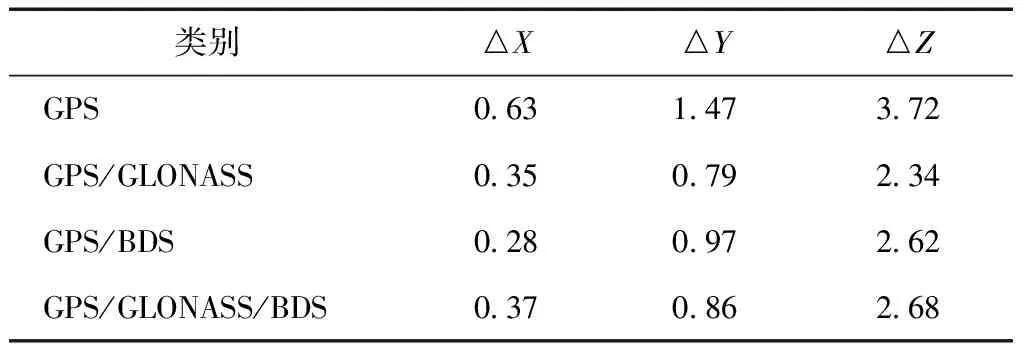
表4 外符合精度平均值 cm
從表3最大值比較可以發現:外符合精度在X、Y方向上主要集中在1~3 cm;Z方向上集中于4~4.5 cm;其中GPS差分信號在3個方向上差值最大值都是最大的,其他3組組合系統差分信號差別不大。從表4平均值比較可以發現:外符合精度在X、Y方向上主要集中在0.25~1 cm;Z方向上集中于2.5~4 cm。其中GPS差分信號在各方向上差值平均值都是最大的,其他3組組合系統差分信號差別不大。表3、表4和圖2對比可知,CORS-RTK外符合精度在最大值和平均值方面,組合系統差分信號精度優于單系統差分信號。
2.2.3 移動平均值法檢測CORS-RTK數據空間精度
移動平均法(moving average method)是根據時間序列逐項推移,依次計算包含一定項數的序時平均數,以此進行預測的方法。移動平均法包括簡單移動平均和加權移動平均。簡單移動平均的各元素權重都相等。移動平均趨勢線平滑處理了數據中的微小波動,從而更清晰地顯示了數據趨勢。移動平均使用特定數目的數據點(由“周期”選項設置),取其平均值,然后將該平均值作為趨勢線中的一個點。例如,如果“周期”設置為 2,那么,頭2個數據點的平均值就是移動平均趨勢線中的第1個點;第2個和第3個數據點的平均值就是趨勢線的第2個點,依此類推。簡單的移動平均的計算式為
(1)
式中:At為某一個觀測值;n為移動周期。
采用靜態已知點檢測法對CORS-RTK進行檢測時,觀測數據會在一個閾值內圍繞著已知點的真實坐標上下波動。將每個觀測值空間三維坐標與已知點空間坐標做算術差值,求出每一個觀測值距離已知點的空間距離△L。將求得的△L再進行移動平均值計算,繪制出每組差分信號的趨勢變化圖。移動周期n設為6。4種差分信號的數據比較結果如圖3~圖6所示。
從圖中可以看出,在數據空間距離△L的分布上,GPS差分信號的△L主要集中在2.5~4 cm,GPS/BDS主要集中于1.5~3 cm之間,GPS/GLONASSA主要集中于1.5~3.5 cm,GPS/GLONASS/BDS主要集中于2~3.5 cm。從趨勢
線走勢可以看出,GPS趨勢圖振幅小于GPS/BDS,GPS/BDS趨勢圖振幅小于GPS/GLONASS/BDS,GPS/GLONASS/BDS趨勢圖振幅與
GPS/GLONAS相當。這主要是由于各個衛星系統都存在著自身特殊的誤差源,如GLONASS導航精度偏低、工作性能不穩定,GPS和BDS抗干擾能力弱于GLONASS等等,這就導致多衛星系統的系統誤差源增多。因此多系統數據在小范圍內波動較大;但在大范圍內多系統又不會因為某一個別系統的誤差而受到大的影響,保障了數據的穩定性和可靠性。
3 結束語
通過對4組差分信號的內外符合精度比較發現:CORS多系統差分信號在精度、穩定性和可靠性方面明顯優于單系統差分信號;這是由于CORS兼容多系統,增加了衛星可見顆數,CORS的穩定性和可靠性都得到了提高,差分信號精度得到了改善。但是同時也發現:GPS/BDS和GPS/GLONASS組合的雙系統差分信號,在內外符合精度上與GPS/BDS/GLONASS組合的3系統差分信號相當;這表明在CORS-RTK定位方面,多系統差分信號進行RTK定位時,初始化時間、可靠性和作業范圍比單系統和雙星系統都有優勢,但是多系統在差分信號的數據精度上與雙星系統差不多,有時甚至略差于雙星系統。
[1] 蔡成輝,劉立龍,黎峻宇,等.CORS定位精度的可靠性研究[J].地理空間信息,2014,12(6):73-75.
[2] 唐衛明,樓益棟,劉暉,等.GPS連續運行參考站系統定位精度檢測方法研究[J].通信學報,2006,27(8):73-77.
[3] 丁健.CORS系統穩定性與精度測試研究[D].合肥:合肥工業大學,2014:47-50.
[4] 徐文兵.GPS 連續運行參考站系統 (CORS) 定位精度的可靠性研究[D].合肥:合肥工業大學,2009:35-40.
[5] 張德慶.單機站CORS的精度分析[J].測繪與空間地理信息,2014,37(4):115-117.
[6] 王鍇華,徐愛功.基于單基站 CORS 的 RTK 精度與距離測試[J].礦山測量,2012 (1):29-31.
[7] 胡文雄.CORS技術及應用探討[J].測繪與空間地理信息,2012,35(10):97-99.
[8] 丁玉平,許友清.區域CORS系統的定位精度分析[J].測繪通報,2010(3):86-87.
[9] 柏柳,肖鸞,胡友健.CORS的精度及其穩定性研究[J].河南理工大學學報,2005,24(4):283-288.
[10]王智超.單基站CORS_RTK精度測試與分析[D].大連:大連理工大學,2013:66-68.
Accuracy analysis for CORS multi-system positioning
GUANMinglei1,FUTianishu1,PINGHaibo2,WANGYinggang1,ZHOULi1
(Huaihai Institute of Technology,Lianyungang,Jiangsu 222005,China; 2.Jianghai Surveying and Mapping Institute Co.,Ltd.,Nantong,Jiangsu 226000,China)
In order to improve the accuracy of multi-system CORS,this paper analyzed the observation data of CORS compatible with three systems GPS,GLONASS and BDS:the RTK positioning data were obtained by using the differential signal of combination with different systems,the internal and external accuracy of the observed data was analyzed by using the moving average algorithm,and various combinations of observed data were compared.Results showed that the accuracy of multi-system differential signal data compatible with GPS/GLONASS/BDS could be similar with that of the dual-system data of GPS/GLONASS or GPS/BDS,and the accuracy of differential signal data from the multi-mode would increase almost 1 cm inX,Ydirections,and 1~2 cm inZdirection contrasted with that from the single system of GPS.
CORS;positioning accuracy;multiple system difference
2016-04-18
管明雷(1990—),男,江蘇連云港人,碩士生,研究方向為海洋空間信息技術。
管明雷,伏天淑,平海波,等.CORS多系統定位精度分析[J].導航定位學報,2017,5(1):91-94.(GUAN Minglei,FU Tianishu,PING Haibo,et al.Accuracy analysis for CORS multi-system positioning[J].Journal of Navigation and Positioning,2017,5(1):91-94.)
10.16547/j.cnki.10-1096.20170119.
P228
A
2095-4999(2017)01-0091-04
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
電子制作(2018年11期)2018-08-04 03:25:42
家庭影院技術(2017年9期)2017-09-26 03:41:45