基于UG及STEP函數的抓舉機工作裝置運動仿真和分析
2017-03-08 06:51:16陳炎冬戴斌宇
裝備制造技術 2017年12期
關鍵詞:分析
陳炎冬,戴斌宇,馮 鮮
(1.無錫太湖學院機電工程學院,江蘇 無錫214064;2.江南大學機械工程學院,江蘇 無錫214122)
0 引言
圓木抓舉機屬于抓木運輸機械類,隨著機器向前行進,安裝在其前端的一個完整的抓具支承結構和連桿會進行抓木工作,也可用于提升、運輸和卸載工作。圓木抓舉機的長處在于作業快速高效、機動性能良好、運作便捷,因而在采集木材時常作為重要運作工具,對于降低工作強度、優化作業品質,降低造價等方面起著舉足輕重的作用[1-3]。
圓木抓舉機的工作裝置運動分析,就是對工作裝置的運動軌跡、位移、速度、加速度等進行分析,判斷是否滿足設計要求[1]。由于圓木抓舉機的抓舉工作的結構復雜性,用傳統的方法分析機構的運動非常費時,且精度較低。隨著三維仿真技術的飛速發展,通過仿真的來進行機構運動分析已經有一些研究[4-6]。本文首先根據測繪某型圓木抓舉機工作裝置的結構建立每個零件的三維模型并進行裝配(見圖3),并以此模型為主模型在UG的運動仿真應用模塊中,建立其運動仿真模型,通過解算仿真模型,可以實時獲得機構運動參數,用圖形和動畫來模擬機構的實際運動過程,從而驗證該運動機構設計的合理性,同時可以根據運動仿真結果方便地修改仿真模型的參數。
1 U G運動仿真模塊介紹
UG運動仿真模塊可以進行機構的干涉分析,分析機構中連桿上標記點或運動副的位移、速度、加速度等,運動仿真模塊會自動復制主模型的裝配文件,并建立一套用來編輯的運動分析方案[4]。用戶可以根據自己的需要加以修改,而不會影響已裝配好的主體模型。其仿真結果可以用來指導零件結構的設計優化。
UG運動仿真和分析的流程圖如1.
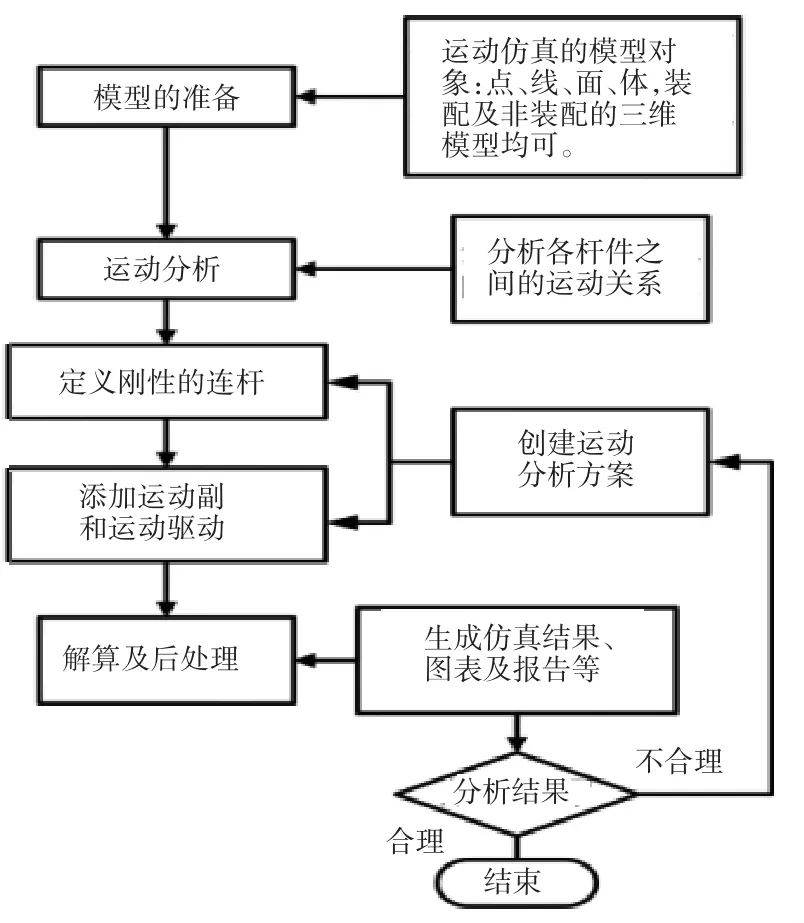
圖1 U G運動仿真和分析的流程圖
2 圓木抓舉機的工作裝置運動仿真和分析
2.1 圓木抓舉機的工作裝置計算機模型的建立[1]
輪式圓木抓舉機工作裝置按照桿數和運動特征可分為正轉四桿、正轉五桿、正轉六桿、反轉六桿、正轉八桿等。這里選擇反轉六桿式工作機構,其優點是:轉動抓具是通過轉爪油缸大腔進油,掘起力也得到了提升;若適當選擇尺寸,就可以在得到良好抓具平動性的同時抓具能夠自動放平,結構緊湊,操作人員視線開闊[1]。見圖2.
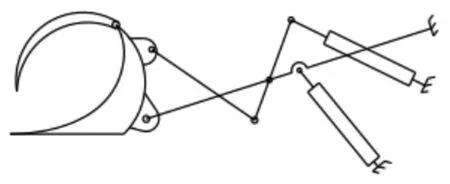
圖2 反轉六桿式工作方式
為進行運動仿真和分析,首先要建立能代表實際機構的三維模型,在UG中建模模塊和裝配模塊提供了極強的造型和裝配功能,建立圓木抓舉機的工作裝置裝配圖,如圖3所示。
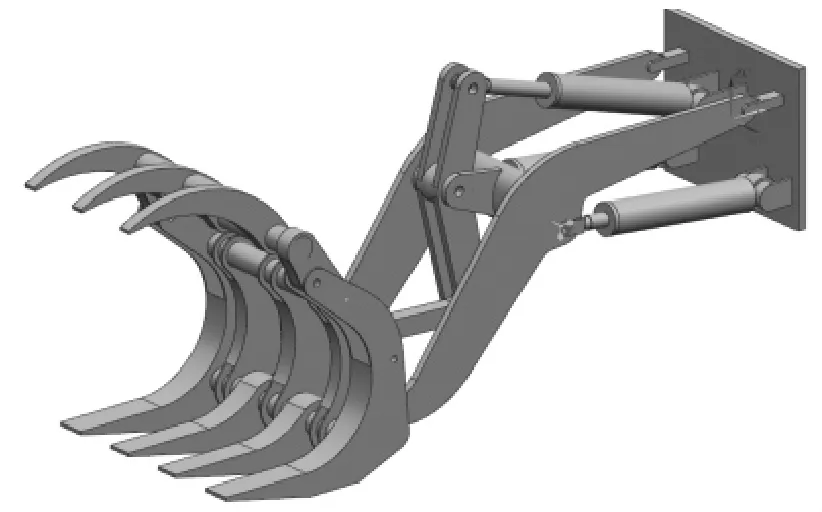
圖3 抓舉機的工作裝置裝配圖圖4 為連桿定義和連桿之間的運動副
2.2 創建運動分析方案
2.2.1 抓舉機的工作裝置連桿的創建
連桿在機構中代表運動件,所有運動的零件必須創建為連桿。每一個連桿的創建包括定義連桿對象、質量屬性、慣性矩、初始轉動速度和移動速度[4]。首先,在運動仿真環境下對各連桿進行定義和命名,為了定義運動副時方便,所以將兩根動臂液壓缸與端蓋還有兩根轉動上爪油缸與端蓋都分別定義為一根連桿,圓木抓舉機的工作裝置中定義的12個連桿分別為一個固定連桿-支座,其它分別為上爪、下爪、連桿、搖臂、動臂、液壓缸-動臂2個、液壓缸-搖臂2個、液壓缸-上爪2個。所有連桿的定義及如圖4(a)所示:

圖3 抓舉機的工作裝置裝配圖圖4 為連桿定義和連桿之間的運動副
2.2.2抓舉機的工作裝置運動副的創建
運動副將機構中的連桿連接在一起,從而使連桿一起運動。運動副具有允許所需運動和限制不要運動的雙重作用[4]。四連桿機構中創建16個運動副,其中支座是與地固定的運動副,其它分別為9個旋轉副,3個滑動副,3個共線副,具體連桿之間的運動副如圖 4(b)所示。
2.2.3 抓舉機的工作裝置運動驅動的設計
運動驅動是賦予運動副上控制運動的參數,共有5種類型:①無驅動;②恒定驅動,設置某一運動副為等常運動(旋轉或線性位移);③簡諧運動驅動,產生一個光滑的向前或向后的正弦運動;④運動函數,運動副按照給定的數學函數運動;⑤關節運動驅動,設置某一運動副以特定的步長(旋轉或線性位移)和特定的步數運動[4]。
本次仿真運動用到的主要是STEP函數[7],STEP函數可以分為嵌入式和疊加式兩種,由于嵌入式函數便于理解,所以用了嵌入式STEP函數來控制模型的運動時間段。經考慮之后,選擇將驅動分別加在動臂與支座、上爪與動臂、上爪與下爪間的轉動副上。新建入STEP函數,以模擬圓木抓舉機的工作情況,運動副的定義如圖4(a)所示,主要采用各鉸接點的轉動副以及液壓桿的滑動副。
經機構運動分析,三個轉動副處添加的驅動函數如下:
(1)添加在轉動臂液壓缸上的驅動函數為:
STEP(X,0.5,0,1.75,(STEP(X,1.75,0,3,(STEP(X,3,-40,3.5,(STEP (X,3.5,-40,5.25,(STEP(X,5.25,-40,6.1,(STEP(X,6.1,0,6.5,0)))))))))))
(2)添加在轉下爪上的驅動函數為:
STEP(X,0.5,0,1.75,(STEP(X,1.75,-38,3,(STEP(X,3,-38,3.5,(STEP(X,3.5,-38,5.25,(STEP(X,5.25,80,6.1,(STEP(X,6.1,0,6.5,0)))))))))))
(3)添加在轉上爪上的驅動函數為:
STEP(X,0.5,0,1.75,(STEP(X,1.75,85,3,(STEP(X,3,85,3.5,(STEP(X,3.5,0,5.25,(STEP(X,5.25,0,6.1,(STEP(X,6.1,0,6.5,0)))))))))))
2.3 仿真結果與分析
進行運動學仿真和分析之前,需要設置建立一個解算方案,主要定義仿真時間和步數兩個參數,設置圓木抓舉機工作裝置解算方案時間為8 s,正好完成一個舉升和抓取動作及張開爪子和回到起始位置的過程,步數為250步,步長為8/250,解算分析完成之后,可以以動畫的形式表現機構的運動仿真過程,同時在上爪質心處上做了一個標記點A,便于觀察連桿的運動軌跡、位移、速度、加速度。
為了分析仿真后的結果,需要用UG運動仿真后處理模塊提供了圖表功能,可將運動分析的數據以表格或圖形的形式輸出,即繪圖至NX和繪圖至電子表格[4]。通過前面的運動仿真模型,在三個驅動作用下,繪制出0~8 s內的位移、速度、加速度曲線。圖5、圖6、圖7別是調用圖表功能給出的上爪質心上標記點A在Z軸方向上的位移、速度、加速度仿真結果。
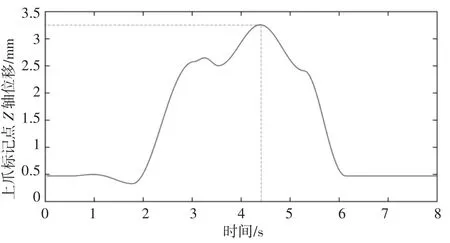
圖5 上爪標記點Z軸位移
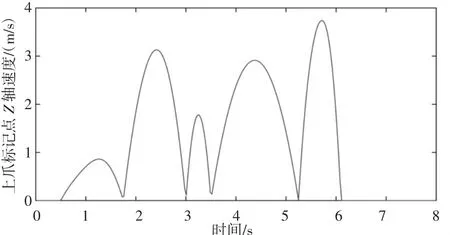
圖6 上爪標記點Z軸速度
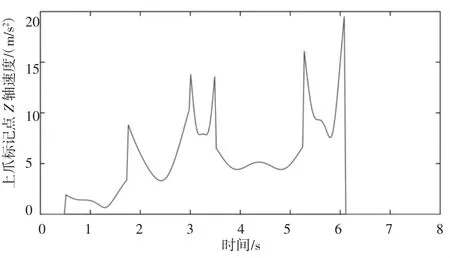
圖7 上爪標記點Z軸加速度
從圖5上爪標記點Z軸位移的曲線可以看出上爪最大舉升高度2.8m,舉升時間2.4 s,卸載時間1.6 s,圖8擺動臂角度位移可以看出該機構在4 s時間內擺動角度范圍-40°~+40°,都滿足了抓舉機的工作裝置的設計要求。圖6、圖7通過上爪的速度和加速度曲線來反映抓舉機的工作過程,上下爪閉合、整體上升、上下爪張開、下降、回到起始位置,從曲線的規律可以基本看出整個過程基本可以實現要求,但是下降時加速度偏大,需要優化。
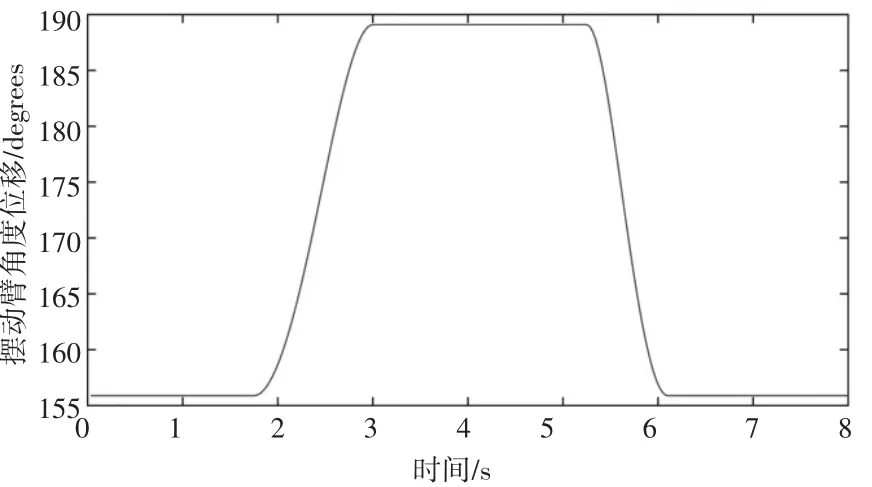
圖8 擺動臂角度位移
3 結論
利用UG運動仿真模塊,可以很方便地進行機構的運動仿真,輕而易舉地解決復雜機構抓舉機的工作裝置的運動學問題,獲得精確的仿真結果。結果反映出本文設計的機構抓舉機的工作裝置是基本合理的,比較真實的體現工作過程,但有進一步改進的方面,如加速度在卸貨階段偏大。在優化設計中也有一定的難點,標記點合理選擇、STEP函數的設計和如何優化需要進行理論分析,對運動仿真提出了比較深的要求。但總的來說,UG運動仿真對對機構的驗證研究對于縮短產品開發周期、提高產品質量和性能有著積極的作用。
[1]侯忠明,姚 凱,王佑君,等.挖掘裝載機的發展現狀及研發趨勢[J].礦山機械,2008,36(6):11-14.
[2]王志云.ZL50型輪式裝載機傳動系統維修[J].內蒙古公路與運輸,2012,128(3):79-80.
[3]張育益,張 珩.圖解裝載機構造與拆裝維修[M].北京:化學工業出版社,2012.
[4]宋曉華,馬曉麗,汪建平.利用UG實現機構的運動仿真和分析[J].實驗技術與管理,2005,22(3):65-68.
[5]李 銳.基于UG的機構運動仿真和分析[J].機械工程與自動化,2010,162(1):44-45.
[6]王昕彥,孫曼麗,李 剛.輪式裝載機工作裝置虛擬仿真研究[J].機械科學與技術,2013,32(1):5.
[7]陳正水,鄧益民.基于UG的STEP運動仿真函數對運動時間的控制分析[J].寧波大學學報(理工版),2012,25(4):103-106.
猜你喜歡
現代畜牧科技(2021年9期)2021-10-13 06:39:14
民用飛機設計與研究(2020年4期)2021-01-21 09:15:02
電子制作(2018年18期)2018-11-14 01:48:24
山東工業技術(2016年15期)2016-12-01 05:31:22
當代經濟研究(2016年5期)2016-12-01 03:12:05
現代農業(2016年5期)2016-02-28 18:42:46
出版與印刷(2016年3期)2016-02-02 01:20:11
中國中醫藥現代遠程教育(2014年11期)2014-08-08 13:23:44
華北水利水電大學學報(社會科學版)(2014年3期)2014-04-16 04:38:31
終身教育研究(2014年5期)2014-02-28 01:23:06
