基于伺服關節用三維壓力傳感器的設計研究
2017-03-09 07:30:54何洪軍劉福強馬傳寶袁德宇張東寧
微特電機 2017年1期
何洪軍,劉福強,馬傳寶,袁德宇,張東寧
(中國電子科技集團公司第二十一研究所,上海 200233)
基于伺服關節用三維壓力傳感器的設計研究
何洪軍,劉福強,馬傳寶,袁德宇,張東寧
(中國電子科技集團公司第二十一研究所,上海 200233)
機器人智能化最重要的是關節智能化,關節智能化取決于伺服關節用三維傳感器的靈敏度和精度。針對伺服關節用三維力傳感器,開展了基于伺服關節用三維壓力傳感器的結構設計、應力分析、三維壓力傳感器的輸入輸出特性曲線及傳感器的標定研究,通過分析可知所設計的三維傳感器耦合效應小,可以用于伺服關節的力/力矩測量和相應的實驗測試,對機器人智能化關節技術的發展提供了一定的參考。
伺服關節;智能化;結構;傳感器;力
0 引 言
機器人智能化的發展主要是關節智能化的發展,而關節模塊的構成主要是伺服電機、控制器、力傳感器和減速器等部件組成[1-3]。但這些部件中可使機器人具有感知的是伺服關節用傳感器。目前,無論是大型搬運機器人伺服關節還是小型行走機器人伺服關節的單向壓力測量、旋轉壓力測量、雙向壓力測量還是三向壓力測量絕大都是應變式壓力傳感器完成的[4]。關于測量伺服關節的單向和雙向壓力的傳感器目前很多,但是對于測試三維力的傳感器很少。現在已有的三維壓力傳感器由于沒有在結構上考慮解耦,因而采集出的信號極為不準確[5]。因此,現有的三維壓力傳感器很少在工程上和實驗上應用。伺服關節在測試三維力時不僅要考慮將水平面方向的力測試準確且要保證軸間作用力的耦合效應小,同時還要保證在測試垂直于水平方向的力時不受水平力的干擾[6],因而對于傳感器結構設計提出了更高的要求。因此,本文開展了基于機器人伺服關節用三維壓力傳感器的結構設計、應力分析并對傳感器的輸出特性和標定做了實驗研究。實驗結果表明所設計的三維傳感器耦合效應小,可以用于機器人伺服關節的力/力矩測量和相應的實驗測試。
1 傳感器工作原理
針對機器人伺服關節力/力矩信息檢測方法和原理很多,如利用壓電效應、磁電效應及電容效應等方式,而本文所設計的三維傳感器采用的是方法是應變片電測技術法[7]。
采用應變片電測法可以獲得力矩和力的信息,通常是要經過4個階段結束傳感器受到的力、核算力矩的相當力和力矩信號的傳輸。
(1) 外力——彈性變形
如果外力作用于傳感器時,置于內部的彈性體將會產生相應的變形,所受到的外力同彈性體上的變形有一定的比例關系。如果置于傳感器內部的應變片尺寸結構確定,則傳感器的變形量僅與所受外力有關,則可表示:
(1)
式中:ε為彈性體隨外力而發生的變形量;F為所受外力。
(2) 彈性變形——彈性體電阻值的改變量
由于置于傳感器內部的彈性體產生變形,則彈性體表面處粘貼的應變片同樣會產生一樣的變形,可能由于粘接劑的因素,兩者產生的變形會有很小的差別。因為置于彈性體上的應變片產生的變形與產生的電阻變化量成比例關系,所以其電阻會有一定的變化量。兩者之間的關系叫靈敏度系數:
(2)
式中:Gf為靈敏度系數;R為應變片原始電阻值;L為電阻絲原長;ΔL為電阻絲的長度;ΔR為電阻變化量。則對應的電阻變化量可寫為:
(3)
在工程測試中,傳感器的靈敏度與線性度必須都要考慮,需確保所設計的彈性體在比例極限下進行作業。通常規定1 000微應變是彈性體變化的極限,為了保證得到的應變片電阻變化量不大于0.002 R,在此靈敏度假定是2,得到的電阻值為300Ω,則產生的電阻量最大為0.7Ω,所以還要進行處理和放大這么微小的變化值。
(3) 阻值變化量——輸出電壓
一般傳感器內置的應變體電阻變化量很小,因而測量其輸出的信號同樣微小,所以要采用相關電路對微弱信號進行處理,進而在對所得信息采取下一步處理。關于應變電測技術法通常有惠更斯電橋和電位計電路。惠更斯電橋比較普遍采用,電位計電路測試法只在測量動態量等特殊情況時使用。
(4) 輸出電壓——輸出力矩/力信息
為了測量三維力矩及三維力,通常在傳感器的彈性體上布置多對應變片,且布置的應變片對數多于維數,通常可用矩陣來表示傳感器各維應變量和所受力的關系:
S=TF
(4)

當需用傳感器進行測量時,為了得到測試數據,可以采用所測試到的多組應變組的輸出值,再通過相應的解耦,進而獲得非耦合檢測矩陣,則傳感器測到的力矩/力信息可表示:
(5)
2 三維傳感器結構設計
本文所設計的機器人伺服關節用三維傳感器的彈性體采用單層E型膜片結構,上下兩端均采用4個M3的螺紋安裝,彈性體采用LY12加工,其彈性體結構和整體結構如圖1所示。
本文所設計的三維力傳感器最大量程為-50~50kg,為了驗證所設計傳感器各維滿足最大應力要求,所設計的三維傳感器根據不同軸向的受力,本文給出了相應的仿真分析結果。
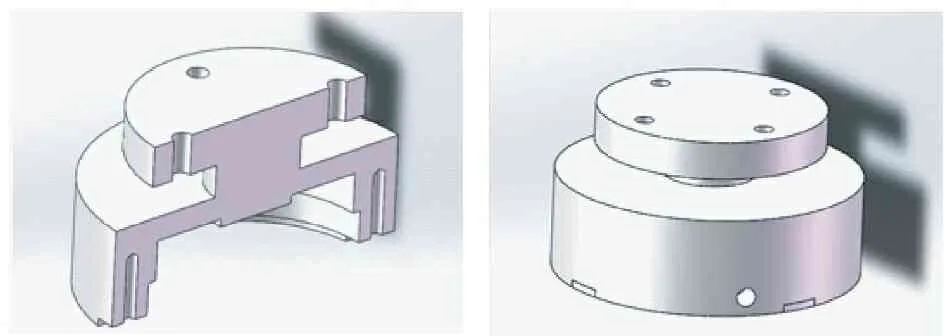
圖1 三維傳感器的結構圖
(1) 對傳感器施加FY=490N,力的施加方式和傳感器變形如圖2所示。
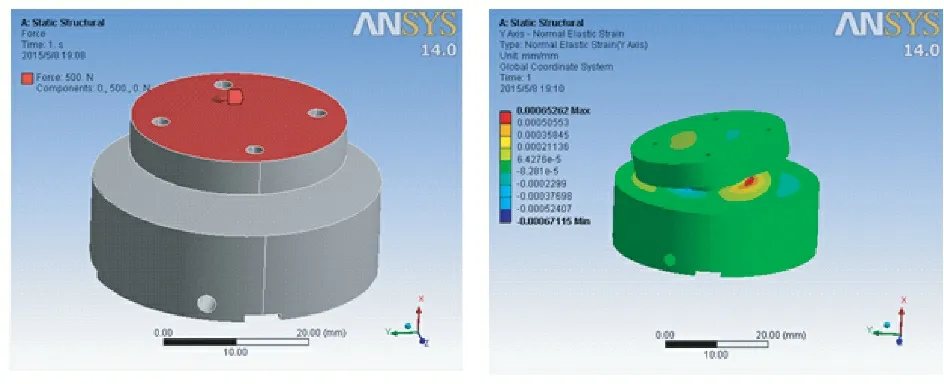
圖2 施加FY=490N負載總體變形示意圖
(2) 對傳感器施加FZ=490N,力的施加方式和傳感器變形如圖3所示。
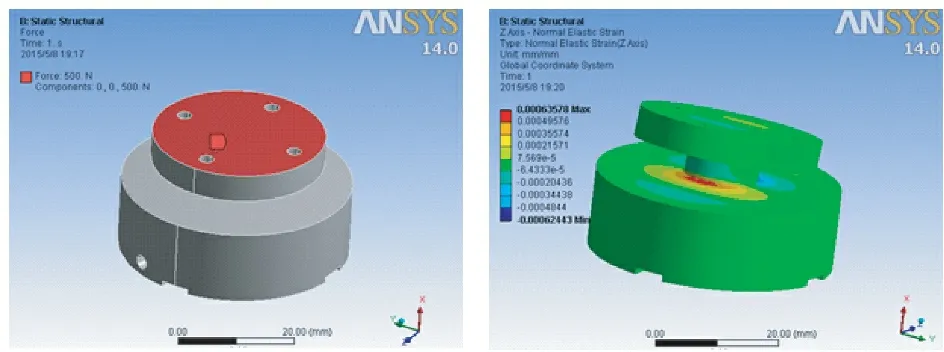
圖3 施加FZ=490N負載總體變形示意圖
(3) 對傳感器施加FX=490N,力的施加方式和傳感器變形如圖4所示。
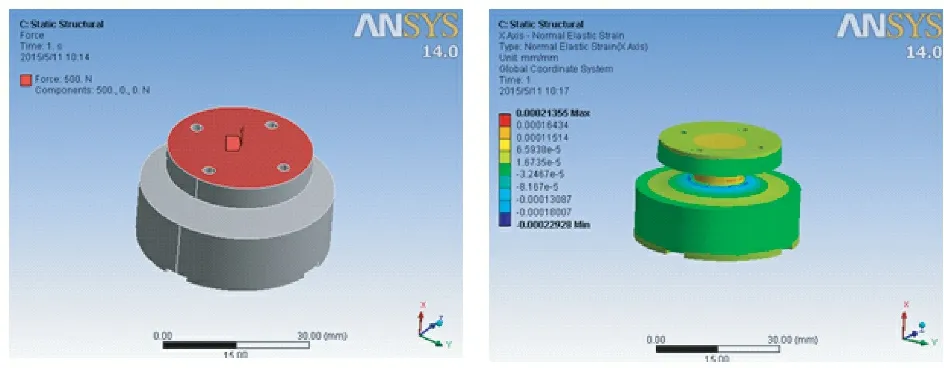
圖4 施加FX=490N負載總體變形示意圖
通過上面3組各向最大受載變形可以得知,各維最大應變均滿足設計要求,可以適用于測試伺服關節受力為490N范圍內的應力測量。
3 傳感器特性分析
3.1 輸入輸出特性分析
為了測試所設計三維傳感器的精度和靈敏度,本文開展了傳感器的輸入輸出特性、傳感器標定特性研究。根據搭建的輸入輸出特性測試平臺,分別測量了10組不同壓力下所得的電壓信號,并對其進行擬合,所得到的輸入輸出特性曲線如圖5~圖7所示。
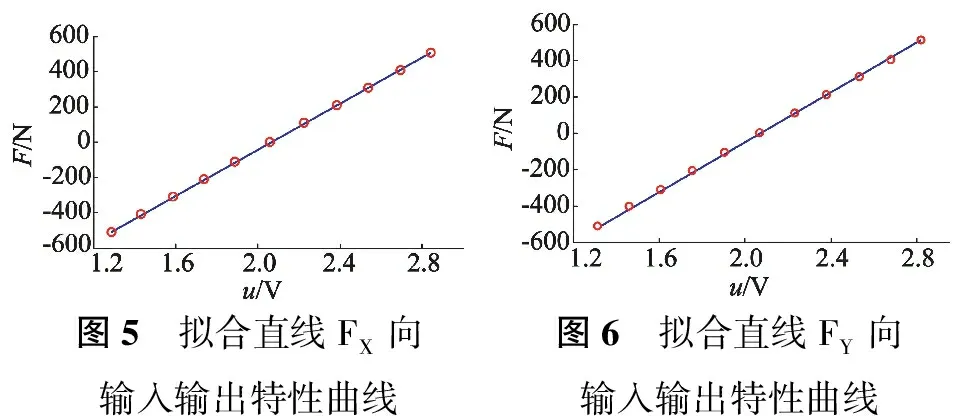
圖5 擬合直線FX向輸入輸出特性曲線圖6 擬合直線FY向輸入輸出特性曲線
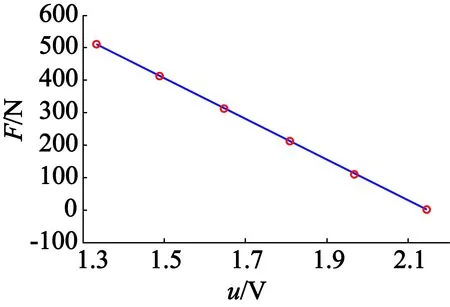
圖7 擬合直線FZ向輸入輸出特性曲線
從3個方向的輸如輸出特性測試點及擬合曲線可以看出,所得設計的三維傳感器的線性度很好,可用于測量量程范圍內的壓力值,其非線性影響幾乎沒有,準確度和精度可以得到相應的保障。
3.2 傳感器標定
傳感器使用前往往需要通過標定才能進行測量和相應的實驗,標定的目的是將傳感器所測力范圍與一定范圍的電壓變化相對應,本文通過對所設計的伺服關節用三維壓力傳感器在一定的時間段加載相應的力,得到相應的時間力曲線,完成對伺服關節用三維傳感器的標定。通過3組標定曲線(如圖8~圖10)可以得知,標定數據成規律性出現,具有很好的重復性,說明三維傳感器具有很好的重復性能。
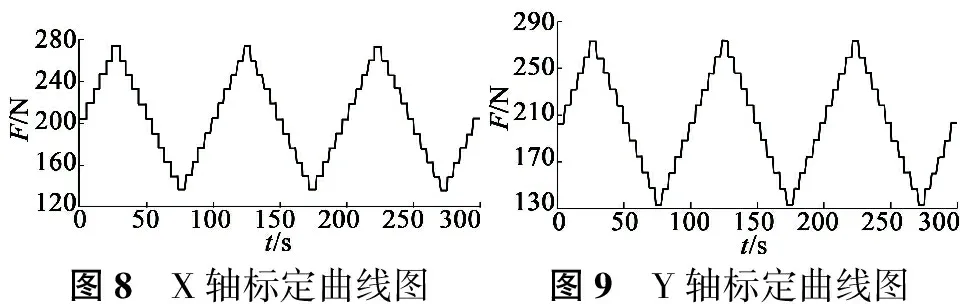
圖8 X軸標定曲線圖圖9 Y軸標定曲線圖
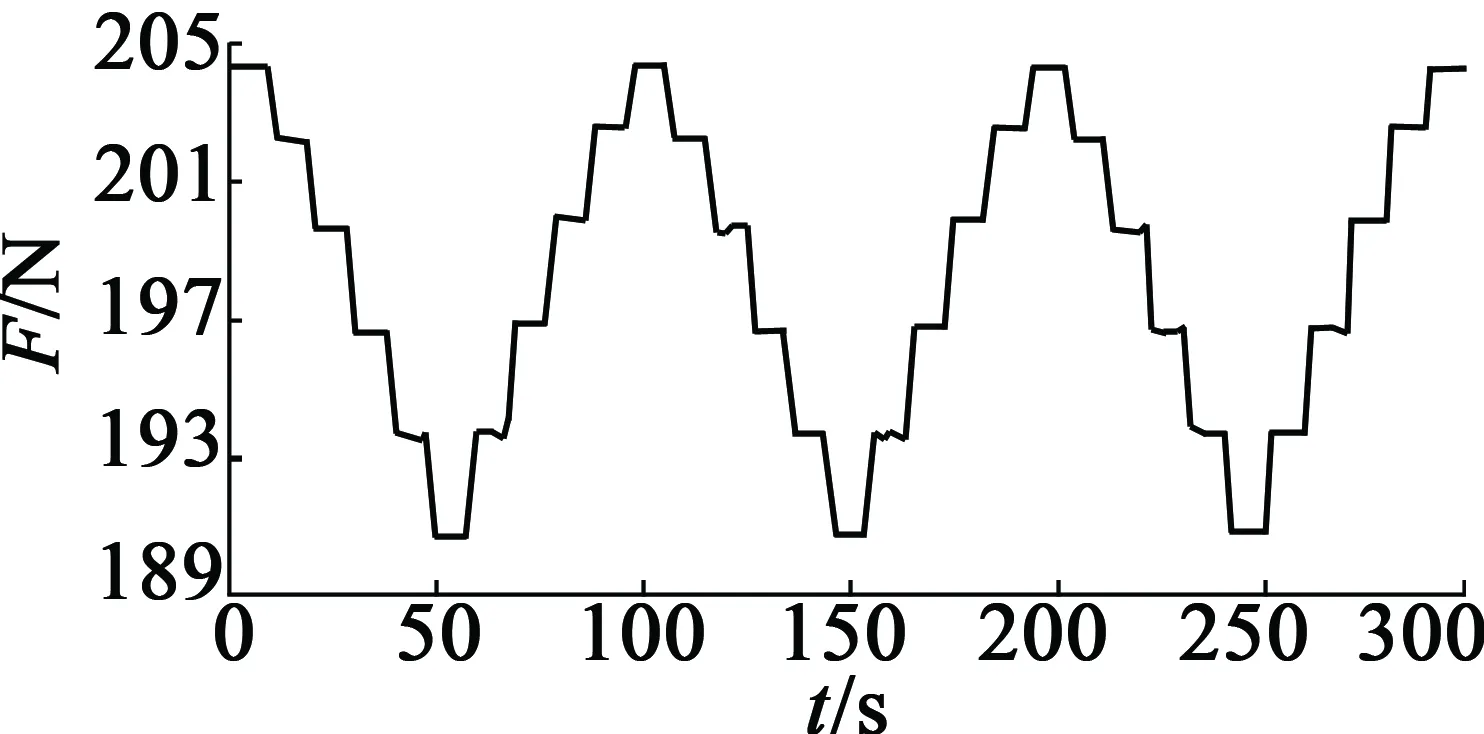
圖10 Z軸標定曲線圖
4 結 語
本文針對機器人伺服關節用三維力傳感器,不僅設計了考慮將水平面方向的力測試準確且要保證軸間作用力的耦合效應小,同時還要保證在測試垂直于水平方向的力時不受水平力的干擾的三維傳感器的結構。本文開展了基于機器人伺服關節用三維壓力傳感器的結構設計、應力分析并對傳感器的輸出特性和標定做了實驗研究。通過應力仿真、三維壓力傳感器的輸入輸出特性曲線及傳感器的標定研究可以得知,本文所設計的三維傳感器耦合效應小,可以用于機器人伺服關節的力/力矩測量和相應的實驗測試,對智能化機器人伺服關節力采樣的研究提供了一定的技術參考。
[1] 夏勇.壓阻式壓力傳感器溫度補償研究與實現[D].西安:西北工業大學,2006.
[2] 孫帥濤.基于BP網絡的壓力傳感器的智能化研究與設計[D].西安:西安理工大學,2010.
[3] 孫以材,劉玉嶺,孟慶浩.壓力傳感器的設計、制造與應用[M].北京:冶金工業出版社,2000:369-381.
[4] 周敏浩,錢政.智能傳感技術與系統[M].北京:北京航空航天大學出版社,2008:14-17.
[5]MATROUFD,VERDETF,ROUVIERM,etal.ModelingnuisancevariablewithfactoranalysisforGMM-basedaudiopatternclassification[J].ComputerSpeechandlanguage,2011,25(3):481-498.
[6 ]ABOYEVRH.Fuzzywaveletneuralnetworkforpredictionofelectricityconsumption[J].ArtificialIntelligenceforEngineeringDesign,Analysisandmanufacturing,2009,23(2):109-118.
[7] 梁橋康.特殊應用的多維力/力矩傳感器研究與應用[D].合肥:中國科學技術大學,2010.
ResearchandDesignofThree-dimensionalPressureSensorBasedontheServoJoint
HE Hong-jun,LIU Fu-qiang,MA Chuan-bao,YUAN De-yu,ZHANG Dong-ning
(No.21ResearchInstituteofCETC,Shanghai200233,China)
Thekeytorobotintelligenceisjointintelligence.Intelligentjointdependsonsensitivityandaccuracyofthethree-dimensionalpressuresensor.Theresearchdiscussedthestructure,stresssimulation,inputandoutputcharacteristicsandcalibrationofthree-dimensionalpressuresensorbasedontheservojoint.Theconclusioncanbeobtainedthatthree-dimensionalpressuresensordesignedhasasmallcouplingeffectanditcanbeappliedtomeasureforce,torqueandthecorrespondingexperiments.Thispaperprovidesareferencefordevelopmentofintelligentjointtechnology.
servojoint;intelligent;structure;sensor;force
2016-07-15
TM
A
1004-7018(2017)01-0041-03
何洪軍, 博士研究生,主要從事機器人整機設計、機器人控制系統設計、伺服關節驅動設計等。
猜你喜歡
中華詩詞(2020年1期)2020-09-21 09:24:52
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
藝術啟蒙(2018年7期)2018-08-23 09:14:18
小學生作文(中高年級適用)(2018年5期)2018-06-11 01:22:56
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
中學生數理化·七年級數學人教版(2017年11期)2017-04-23 07:18:00
數學大王·中高年級(2016年12期)2016-12-26 21:37:36