三維激光掃描點云直棱特征點填補方法
2017-03-09 02:51:36徐廣鵬姚吉利
山東理工大學學報(自然科學版) 2017年2期
徐廣鵬, 姚吉利
(山東理工大學 建筑工程學院,山東 淄博 255049)
三維激光掃描點云直棱特征點填補方法
徐廣鵬, 姚吉利
(山東理工大學 建筑工程學院,山東 淄博 255049)
在三維激光掃描中按照一定的角度分辨率對掃描物體進行離散化采樣時,由于物體表面點云中棱角特征模糊,若直接用其構建三維表面模型,在棱角處會導致嚴重失真,進而影響模型的分析和應用.針對此問題提出了物體棱角自動化填補方法,其技術路線是:首先對點云建立空間索引、精簡數據;其次根據掃描點云的法向量,對掃描點云進行非監督分類,從而將屬于一個平面的點分為一類;最后利用平面相交的辦法填補直線棱角上的特征點.通過實驗證明,該方法自動化程度高、填補結果準確,能夠使得建立的三維模型與真實物體更加接近,模型分析結果更加準確.
三維激光掃描;平面聚類;特征增補;面積相對誤差
地面三維激光掃描(Terrestrial Laser Scanner,TLS)是一種速度快、高精度、大密度獲取物體表面點云的測量技術,應用于多個領域[1].無論哪個領域的應用,都要建立物體表面三維模型,三維建模的兩個關鍵問題是保證模型點的高精度和模型的完整性,但是由于掃描點之間有間隔,掃描儀發出的激光束很難落到被掃描物體的尖銳特征上,這導致獲得的掃描點云中缺失大量的特征點[2],因此直接依靠采集的點云構建的三維模型存在物體表面代表性誤差并且不真實[3].如果在建模以前,對掃描物體點云進行特征點填補,則能更好的表達物體表面形態[4-5],這個過程稱為點云特征化.對點云進行特征填補的方法有兩類,一類是用影像填補,另一類是基于純掃描點云的填補.趙自明等[6]提出了一種基于影像邊緣特征的點云特征點填補方法.該方法需影像與點云配準,并且配準過程中存在誤差,填補特征點的效率低,精度不高.基于純掃描點云的填補的方法是利用掃描點的局部鄰域協方差矩陣的特征值、法矢、 曲率等作為依據,提取點云中的特征點,然后根據一定的準則用特征點生成特征線,插值特征線上的點.利用上述方法填補特征點往往需要迭代計算,計算量大,并且計算結果不準確,難以獲得理想的填補結果.針對以上兩種方法的不足,本文提出了基于幾何屬性的物體直棱填補方法.其基本原理是根據掃描點的法向量,使用共享近鄰聚類算法,對點云進行聚類分析,得到物體面點云,使用平面相交的方法,對被掃描物體尖銳特征上的特征點進行填補.
1 棱角填補原理
1.1 數據預處理
地面激光掃描無論用于閉合的單個物體,還是開放的大范圍地形測繪,都需通過有限視場、不同視角、不同空間分辨率的多站掃描,才能完成物體形態或地表形態測量,所以對得到的多站點云,首先進行點云定向,將多站坐標系統一到同一坐標系中,刪除建筑物之外的點,然后進行點云重采樣,使點云在空間分布均勻化.
1.2 建立索引
X=X0+iΔ+dx
Y=Y0+jΔ+dy
Z=Z0+kΔ+dz
(1)
式中dx、dy、dz為不滿Δ的尾數.
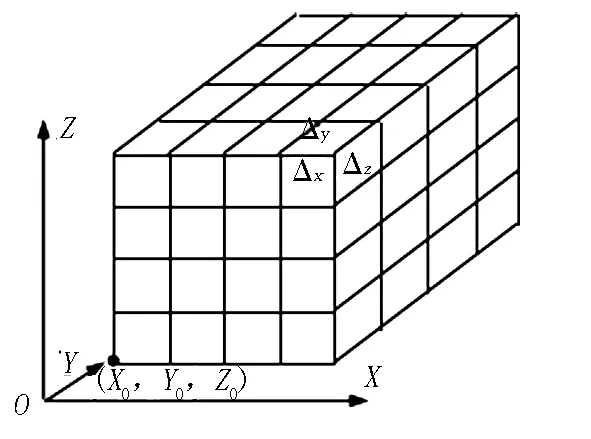
圖1 點云分割示意圖
1.3 數據精簡
計算棱角點坐標只需要棱線附近的幾十個點即可,在對點云分類以前刪除平面中遠離棱線的點,只保留棱線附近的點,可減小計算量,提高計算速度.對建立空間索引的點云,若同一個柵格內的點云在一個平面內,則認為此柵格中的點遠離棱線,將其中的點刪除,此過程稱為數據精簡.
首先按公式(1)對點云建立空間索引,按公式(2)計算同一個柵格中N個點的協方差陣C、C的3個特征值λ1≥λ2≥λ3和擬合度M[12]
(2)

1.4 點云按平面聚類
首先計算數據點的法向量,本文采用改進的基于局部表面擬合的方法[14]計算精簡后的點云的法向量,對得到的數據點建立KD-Tree空間索引,搜索每個數據點的k鄰近點,根據k個點的坐標擬合平面,平面擬合方程為
AX+BY+CZ-1=0
(3)

(4)
式中X,Y,Z是平面上掃描點坐標,誤差方程為

(5)
平差后平面的單位法線向量為n=
(6)
擬合誤差為
(7)


原始點云圖2 擬合誤差閥值的選取
實驗證明,擬合誤差閥值選取0.0005m,會取得比較理想的結果.
本文選用的聚類方法為基于網格的共享近鄰聚類算法[15],該算法的優點在于不需要輸入聚類的個數,并且能在聚類過程中刪除噪聲點,孤立點.該算法分步完成,第一步對得到的單位法向量建立空間索引,統計每個柵格中的節點個數,將數量小于閥值的柵格中的點視為噪聲點,大于閥值的計算同一個柵格中點的重心坐標;其次對得到的重心坐標進行聚類分析,查找每個重心點坐標的k臨近點,比較每兩個節點的k鄰近點,若公共點個數大于閥值則為一類.對單位法向量聚類得到的聚類結果為各組平行平面,為了區分平行平面,對得到的每組平行平面,根據原點到該平面的距離D再次使用基于網格的共享近鄰聚類算法進行聚類分析,此時得到的聚類結果中屬于一類的點即為同一個平面的點.
1.5 兩個平面交線點填補原理

(8)
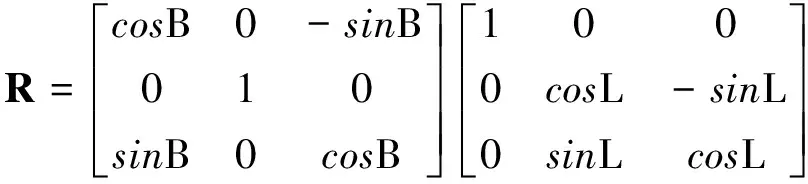
(9)

(10)
轉換之后同一平面點的x,y坐標在一條直線上,即將轉換后點云投影到xy平面后點云分布如圖4所示.
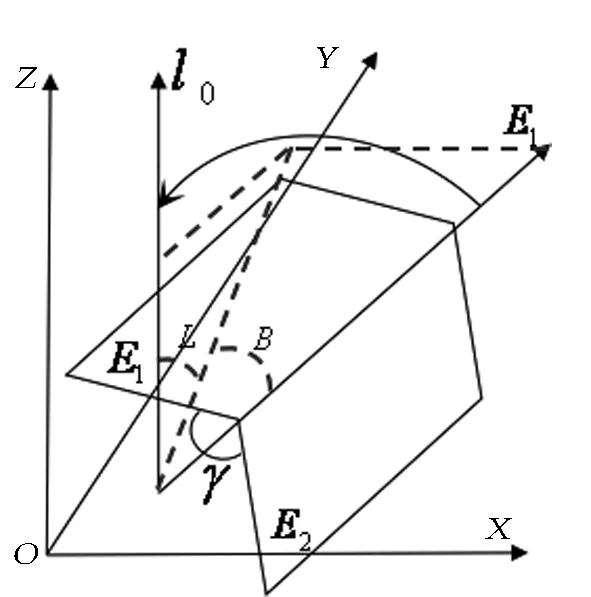
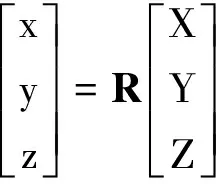
圖3 兩平面參數示意圖
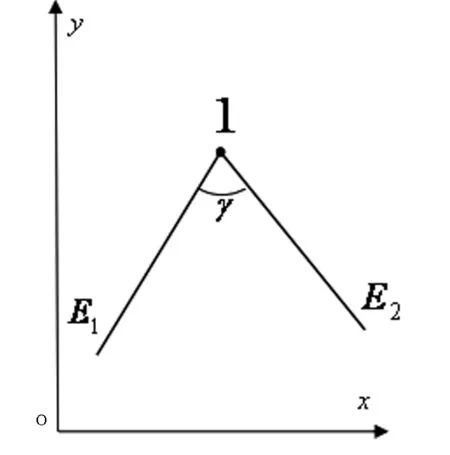
圖4 旋轉后兩平示意圖
對旋轉后的點云進行特征填補,特征點的x,y坐標為xP、yP,z坐標的范圍為兩平面在交線l的r鄰域內點z坐標范圍的交集.最后用R-1將填補的特征點坐標轉換到原始坐標系.
1.6 多個平面兩兩相互交線特征點填補
通過兩個條件判斷兩平面是否進行特征填補,一是兩平面的夾角,二是兩平面在交線附近是否都有掃描點.每一類點擬合一個平面,得到其法向量和擬合誤差,若擬合誤差大于閥值則此類點不參與特征點填補.按公式(11)計算每兩個平面(圖3)E1、E2法向量的夾角γ
cosγ=n·m
(11)
通過γ判斷兩平面是否平行,若不平行則計算平面交線的法向量l,按公式(9)、(10)對兩平面點云進行坐標轉換,旋轉后的兩平面點云分布如圖4所示,判斷兩平面在交線r鄰域內是否都存在掃描點,若都存在則填補缺失的特征點.
2 實驗分析
2.1 數據介紹
實驗采用ZF掃描儀,對樓房進行掃描,每個樓角布設一個球形標靶,標靶架設在地面控制點,保證每站至少能觀測到2~3個標靶,共掃描5站,每站約400萬個掃描點.標靶控制點平面控制測量采用精密導線測量,水平角觀測6個測回,高程控制測量采用精密水準測量,平面點位誤差為1.8mm,高程誤差為0.4mm.數據處理采用自己開發的基于激光點云定向軟件LiDARBBA,采用光束法區域網平差進行整體定向[16],將5站掃描點云統一到同一個坐標系中,定向后5站的平面點位中誤差為2mm,空間點位中誤差為2.5mm高程中誤差為1.5mm.從定向后的點云中取出兩塊點云作為實驗對象,分別為臺階和樓房一角.
2.2 特征點填補和模型分析
2.2.1 特征點填補
臺階掃描點點間距為0.05m,如圖5(a)所示.未對臺階點云進行數據精簡操作.在計算法向量時鄰近點個數選取10,刪除平面擬合誤差大于0.002mm的掃描點.對單位法向量聚類時鄰近點個數取10,公共點個數取5,同一個柵格中節點個數小于20則視為噪聲點,平面聚類后共分為14個平面,聚類結果如圖5(b)所示.填補特征點間距為0.03m,特征化結果如圖5(c)所示.

(a)原始點云 (b)平面聚類結果 (c)填補結果圖5 臺階點云特征化
樓房掃描點如圖6(a)所示,得到建筑物掃描點14萬個.建立空間索引時三個坐標軸上的分辨率均設置為0.8m,計算每個柵格中點云的擬合度M,若M小于5則將此柵格中的點云刪除,精簡后點云分布如圖6(b)所示,從結果中可以看看出含有棱角的柵格被保留下來.計算法向量和點云聚類過程中參數的設置與臺階模型相同,聚類結果如圖6(c)所示,共分為26個平面.填補結果如圖6(d)所示.可以看到,本文算法可自動填補特征點并且填補準確.
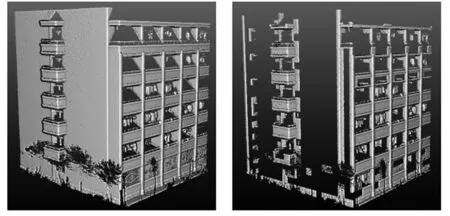
(a)原始點云 (b)精簡后點云
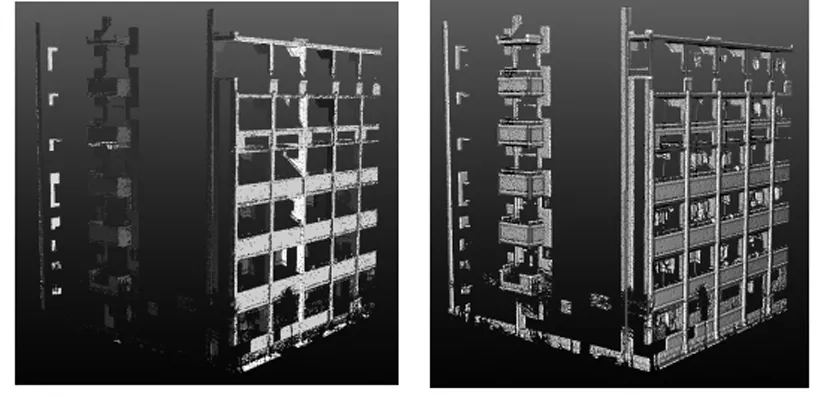
(c)平面聚類結果 (d)填補結果圖6 建筑物點云特征化
2.2.2 模型分析
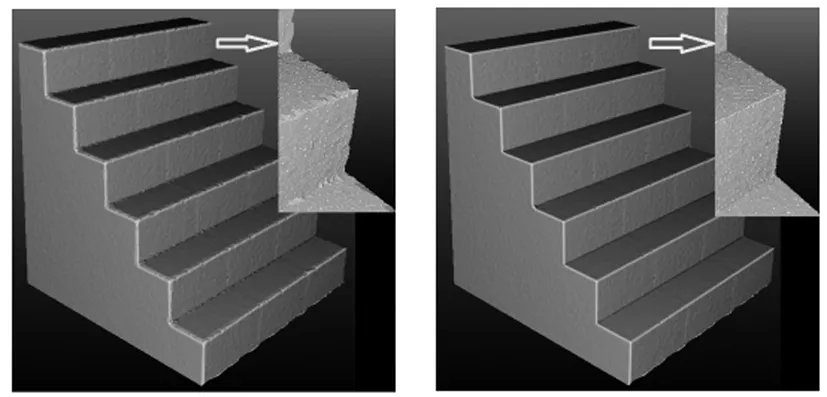
(a)特征填補前臺階三維模型 (b)特征填補后臺階三維模型圖7 特征填補前后臺階三維模型對比

3 結論
由于三維激光掃描儀發出的激光束之間有間隔,掃描點是按球面等距離采樣,導致獲取的掃描點云中缺失大量的特征,棱角模糊,本文提出的基于幾何屬性的物體直棱自動填補方法,通過面面相交的辦法自動填補點云中的棱線點,通過實驗可得到如下結論:
(1)特征化點云建立的三維物體模型,在幾何形狀、大小上,與實際物體更接近,為物體特征分析提供詳實可靠的格網化數據,使模型表面積、體積等計算更加準確,同時可減少平面上大量的點,點云數據量會大大減小.
(2)填補的特征點為基于面片精確點云拼接[17-18]、基于直線精確點云拼接提供同名控制點,使點云拼接的精度更高.
(3)掃描物體多種多樣,今后對平面與圓柱交線點填補、圓柱與圓柱交線點填補等特征點的填補還要進一步深入地研究.
[1]LERMAJL,BIOSCAJM.Unsupervisedrobustplanarsegmentationofterrestriallaserscannerpointcloudsbasedonfuzzyclusteringmethods[J].IsprsJournalofPhotogrammetry&RemoteSensing, 2008, 63(1):84-98.
[2]LEMMENSM.Terrestriallaserscanning[M]//Geo-information.SpringerNetherlands,2011: 101-121.
[3]石銀濤,程效軍,張鴻飛.地面三維激光掃描建模精度研究[J].河南科學,2010,28(2):182-186.
[4] 謝祥根,符鋅砂.考慮地形特征的三角網數模建立方法[J].中國公路學報,2000,13(1):10-13.
[5]劉學軍,符鋅砂.TIN數模的點單位算法及網形優化[J].中國公路學報,1997(2):24-31.
[6]趙自明,郝向陽,趙杰.影像邊緣特征與LS-SVM的點云邊緣殘缺區域修補方法[J].測繪科學,2012,37(4): 99-101.
[7]王晏民,郭明.大規模點云數據的二維與三維混合索引方法[J].測繪學報,2012,41(4): 605-612.
[8]龔俊,朱慶,章漢武,等.基于R樹索引的三維場景細節層次自適應控制方法[J].測繪學報,2011,40(4):531- 534.
[9]JOCHEMA,H?FLEB,WICHMANNV,etal.Area-wideroofplanesegmentationinairborneLiDARpointclouds[J].Computers,EnvironmentandUrbanSystems,2012,36(1): 54-64.
[10]SANKARANARAYANANJ,SAMETH,VARSHNEYA.AfastallNearestneighboralgorithmforapplicationsinvolvinglargepoint-clouds[J].Computers&Graphics,2007,31(2): 157-174.
[11]MANDOWA,MARTNEZJL,REINAAJ,etal.Fastrange-independentsphericalsubsamplingof3Dlaserscannerpointsanddatareductionperformanceevaluationforsceneregistration[J].PatternRecognitionLetters,2010,31: 1239-1250.
[12]GARCA-SELLéSD,FALIVENEO,ARBUéP,etal.Supervisedidentificationandreconstructionofnear-planargeologicalsurfacesfromterrestriallaserscanning[J].Computers&Geosciences,2011,37(10): 1584-1594.
[13]HOPPEH,DEROSET,DUCHAMPT,etal.Surfacereconstructionfromunorganizedpoints[C]//ACMSiggraphComputerGraphics,1999,26(2):71-78.
[14]PETERNELLM.Developablesurfacefittingtopointclouds[J].ComputerAidedGeometricDesign,2004,21(8):785-803.
[15]劉敏娟,柴玉梅.基于網格的共享近鄰聚類算法[J].計算機應用,2006,26(7):1673-1675.
[16]姚吉利,賈象陽,馬寧,等.光束法區域網平差的地面激光掃描多站點云自動定向方法[J].測繪學報,2014,43(7):711-716.
[17]王力,李廣云,張啟福,等.激光掃描中平面擬合及坐標轉換模型構建[J].測繪科學技術學報,2012(2):101-104.
[18]侯東興,李宗春,鄧勇.基于共有單平面的點云拼接技術研究[J].大地測量與地球動力學,2015,35(2):248-252.
(編輯:姚佳良)
Automatic packing of straight edge feature in 3D laser scanning point cloud
XU Guang-peng, YAO Ji-li
(School of Architecture Engineering, Shandong University of Technology, Zibo 255049, China )
According to certain angle resolution, we conduct discrete sampling of scanning the object in the process of 3D laser scanning. Due to the fuzzy corner of object surface point cloud, it will lead to serious distortion at the edges and corners, which will affect the analysis and application of the model if we build 3D surface model directly. This paper put forward a method of automated packing corner for this problem. Its technical route is as follows: firstly, we establish a spatial index and simplify data for point clouds. Secondly, we carry on the non-supervised classification which based on the normal vector of point cloud, then judge that belong to a planar points. Finally, we fill up feature points on the straight edge and corner by the plane intersection method. The experimental results show that this method is high automation degree and has accurate filling results, which makes the 3D model closer to the real world and the model analysis result is more accurate.
3D laser scanning; plane clustering; feature patch; area relative error
2016-03-07
徐廣鵬,男,810364691@qq.com; 通信作者:姚吉利,男, YSY_941123@sdut.edu.cn
1672-6197(2017)02-0074-05
P232
A
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
當代陜西(2019年10期)2019-06-03 10:12:04
數學小靈通·3-4年級(2017年9期)2017-10-13 08:10:54
光學精密工程(2016年6期)2016-11-07 09:07:19
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
