摩托車用起動發電一體機的電感設計
2017-03-10 21:24:16宋小永黃鋒光
中國科技縱橫 2017年1期
宋小永++黃鋒光
摘 要:摩托車用起動發電一體機(ISG)方興未艾。ISG具有結構緊湊,起動噪音小,發電效率高,易于控制等優點。ISG的電感不僅影響到電流環的動,靜態響應,還制約著輸出功率,功率因數以及直流電壓等。理論上ISG的電感值應滿足VSR輸出有功(無功)功率及電流波形品質指標兩方面的要求。一方面為使VSR獲得四象限運行特性,電感值有上限要求;另一方面為滿足瞬態電流跟蹤指標,電流過零時,變化率最大,此時電感應足夠小,同時在正弦波電流峰值處,諧波電流脈動最嚴重,此時電感應足夠大。樣機制作驗證了上述理論。
關鍵詞:起動發電一體機(ISG);有功功率;無功功率;瞬態電流跟蹤;電感
中圖分類號:TK411.24 文獻標識碼:A 文章編號:1671-2064(2017)01-0073-02
隨著時代的進步,人民生活水平的提高,環保問題越來越受到關注。摩托車作為大眾化的產品也在積極的進行著環保對應。相對傳統的起動發電分離系統,起動發電一體機(ISG)具有結構緊湊,起動噪音小,發電效率高,易于控制等優點,越來越受到用戶青睞。
下面分析摩托車用ISG的電感設計期望對開發產品規格的選定有所幫助。
1 電壓型整流器VSR交流側電感設計的一般關系式
ISG系統設計中,交流側電感的設計直接影響整個ISG系統的質量。這是因為交流側電感的取值不僅影響到電流環的動,靜態響應,還制約著輸出功率,功率因數以及直流電壓等。
2 滿足VSR有功(無功)功率指標時電感的設計
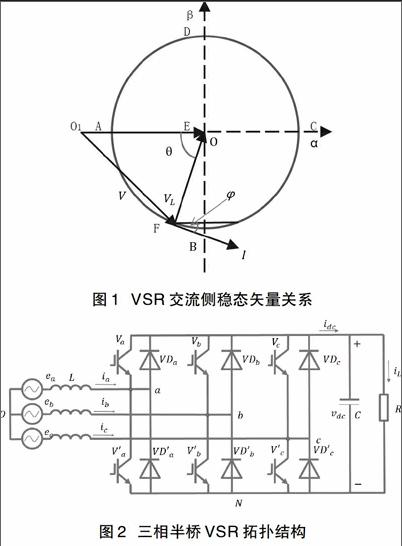
穩態條件下,VSR交流側矢量關系如圖1所示。
E:電機電動勢矢量
V:VSR交流側相電壓矢量
VL:VSR交流側電感電壓矢量
I:VSR交流側相電流矢量
為了能使VSR四象限運行,且可輸出足夠大的交流電流, (1-1)
式中Em——電機相電動勢峰值;
Im——VSR交流側基波相電流峰值;
Vm——VSR交流側基波相電壓峰值
三相VSR空間矢量控制時,M=/3忽略VSR損耗,則
(1-2)
式中 p——三相VSR交流側有功功率;
q——三相VSR交流側無功功率
因Vm≤Mvdc,聯合上式與(1-1)式得
L≤ (1-3)
或
L≤ (1-4)
式(1-3)(1-4)表示在一定的ISG電動勢Em,直流側電壓vdc條件下,滿足三相VSR交流側有功功率p或無功功率q指標時ISG電感上限值。
通過對ABCD四個特殊工作點的分析可知,C點(純電容特性,)時電感上限最小,為
L≤ (1-5)
3 滿足VSR瞬態電流跟蹤指標的電感設計
以正弦波電流控制為例,當電流過零時,變化率最大,此時電感應足夠小,以滿足快速跟蹤電流要求;另一方面,在正弦波電流峰值處,諧波電流脈動最嚴重,此時電感應足夠大,以滿足抑制諧波電流要求。
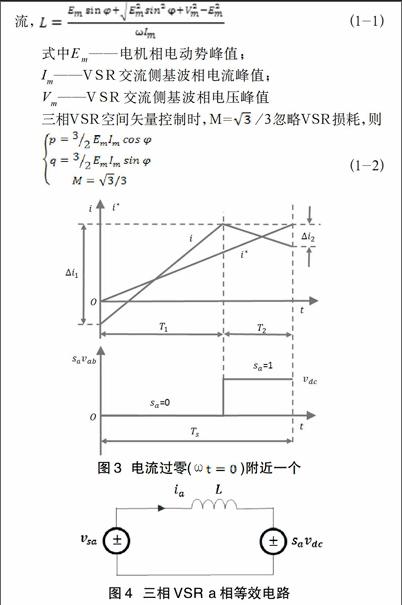
按圖2示三相VSR拓撲結構分析,考慮a相電壓方程
(2-1)
若忽略VSR交流側電阻R,且令,則上式簡化為
(2-2)
式中 sk——二值邏輯開關函數。
仍考慮三相VSR單位功率因數正弦波電流控制,討論滿足瞬態電流跟蹤要求的電感。考慮電流過零(ωt=0)處附近一個PWM開關周期Ts中的電流跟蹤瞬態過程,見圖3。
穩態條件下,當0≤t≤T1時,sa=0,且
(2-3)
當T1≤t≤Ts時,sa=1,且
(2-4)
若滿足快速電流跟蹤要求,則必須
ω (2-5)
PWM開關周期中的電流跟蹤波形
綜合式(2-3)~式(2-5),并令sb=sc=1,得
L≤。當T1=Ts時,將取得最大電流變化率,且
L≤ (2-6)
類似地,分析抑制諧波電流時電感的設計可得:
L≥ >1.5Em) (2-7)
所以,滿足電流瞬態跟蹤指標時,三相VSR電感取值范圍為
≤L≤ >1.5Em) (2-8)
比較式(1-5)和式(2-8),電感上限應取式(1-5),即
≤L≤ (2-9)
4 我司方案制訂
結合摩托車特點及電氣系統的要求,制訂ISG開發參數:,交流側電流基波峰值,電機基波角頻率(按摩托車起動轉速800rpm,12磁極轉子),PWM開關周期Ts=50μs(20K),代入式(2-12),
≤L ≤
≤L≤H即≤L≤H
實際開發過程中,按上述理論指導,通過電機外廓尺寸,線徑,匝數等參數調整,配合控制器的調試,取得了滿意的效果,相信不久的將來,起動發電一體機的摩托新品會越來越多,以滿足廣大消費者。
