
起落架磁流變減震器半主動控制研究
2017-03-10 21:56:35趙傳東閆國華
中國科技縱橫 2017年1期
關鍵詞:控制
趙傳東++閆國華

摘 要:對飛機起落架減震半主動控制方法進行了研究,將魯棒控制理論中的控制用于起落架的磁流變減震器的控制設計,設計了控制器。在Matlab中搭建Bouc-Wen模型和控制器。對被動控制、天棚控制和控制進行對比仿真分析。結果表明,在飛機著陸時,控制方法使減震器能量吸收和耗散快、垂直振動小,減震效果明顯優(yōu)于被動和天棚控制策略。控制器對系統(tǒng)參數(shù)變化具有較好的魯棒性。
關鍵詞:起落架;磁流變減震器;控制;魯棒性
中圖分類號:TH137 文獻標識碼:A 文章編號:1671-2064(2017)01-0104-04
引言
減震器在當飛機進行著陸撞擊、跑道滑行時減緩飛機產生的振動,降低飛機地面載荷,提高乘員舒適性,保障飛機飛行安全等方面發(fā)揮著極其重要的作用。隨著航空工業(yè)的發(fā)展,現(xiàn)代飛機對起落架的緩沖系統(tǒng)及其控制系統(tǒng)提出了更高的要求。半主動控制結構簡單,能耗低,可靠性高,控制效果接近主動控制。隨著磁流變(MR)阻尼器的半主動控制研究蓬勃發(fā)展,其在飛機起落架上也很好的應用前景。
本文在Matlab中建立飛機起落架和磁流變減震器的數(shù)學模型,基于魯棒控制理論設計一個控制器,通過改變線圈的電流來調節(jié)可控阻尼力,從而來實現(xiàn)對起落架的減震控制。將控制策略與被動、天棚(Skyhook)控制進行對比分析。仿真驗證了本文提出的魯棒控制策略用于飛機起落架減震器上有較好的控制效果。
1 磁流變減震器特點及其模型
磁流變液在磁場作用下,它可在瞬間內(毫秒級)由流動性能良好的牛頓流體變?yōu)锽ingham半固體,且這種變化連續(xù)、可控、可逆。由磁流變液組成的減震器稱為磁流變減震器。
磁流變減震器雖然具備良好的阻尼力特性,但動力測試結果表明,該類阻尼器的動力特性[5]表現(xiàn)出強烈的非線性滯回特性。而起落架減震過程的快速性和有效性都對MR減震器的力學模型提出了較高的要求。為了充分發(fā)揮MR減震器良好的半主動性能,需要有精確的、簡單實用的力學模型,以保證控制算法的實時有效。
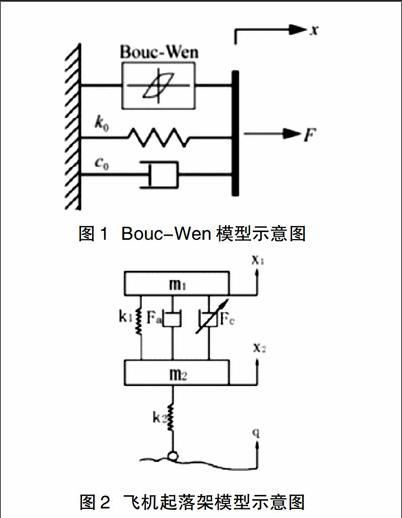
選擇Bouc-Wen模型[6]模擬磁流變減震器的動態(tài)特性。該模型如圖1所示,模型表達式為:
式中,c0是彈簧的初始變形,c和分別是相對位移和相支速度。
2 起落架減震半主動控制數(shù)學模型
為模擬飛機著陸時的狀態(tài),便于分析。建立圖2所示的考慮二自由度的起落架運動模型[7]。其中,m1和m2分別為機身質量和機輪質量;k1為磁流變緩沖器的油液壓縮彈性系數(shù);k2是輪胎剛度;q為跑道輸入激勵;x2為輪胎重心位移; x1為機身重心位移。通過受力分析得:
式中,F(xiàn)a為油液阻尼系數(shù),F(xiàn)c為由磁場強度決定的可控阻尼力。
根據(jù)示意圖也可以定義系統(tǒng)的狀態(tài)變量為,其中x1-x2為懸架動行程,為機身質量絕對速度,x2-q為機輪形變量,為機輪質量絕對速度,則可將方程(3)和(4)寫成狀態(tài)方程的形式:
3 半主動控制器設計
3.1 天棚控制
理想天棚控制[8]是假設機身質量與慣性參考地面之間具有阻尼。天棚阻尼力為:
其中,Csky是天棚阻尼系數(shù),由系統(tǒng)優(yōu)化參數(shù)確定。磁流變減震器的可控阻尼力應該盡量滿足下式
即和應該同向。可控阻尼最大輸出力為Fcmax和Fcmix最小輸出力為,則Fc可以表示為
3.2 魯棒控制器設計
控制系統(tǒng)的最優(yōu)化是極小化某些閉環(huán)系統(tǒng)頻率響應的峰值。一般控制配置如圖3所示。
控制[9-11]由圖3表述,其中P(s)是一個線性系統(tǒng),表示如下
w為外部輸入向量,u是控制輸入向量,e是控制輸出向量,y是測量向量。控制設計是由增廣對象模型P(s)和控制器K(s)組成,通過給定的和控制信號u(=K(s)y)確保閉環(huán)系統(tǒng)內部穩(wěn)定和抵消w和e的影響,從而最大限度地減少從外部輸入w對控制輸出(e)的閉環(huán)影響。預先設定的衰減水平為γ,則控制問題是設計一個內部穩(wěn)定的閉環(huán)系統(tǒng)控制器并確保:
(13)其中
是從w到e的閉環(huán)傳遞矩陣,是的最大奇異值。
本文是在控制策略的基礎上發(fā)展的運動方程,用以提高著陸性能。控制器的目標是最大限度地減少機身的垂直加速度。選擇輪胎壓縮量x2-q的動載荷和懸架行程為評價變量。被控系統(tǒng)的狀態(tài)方程(5)和輸出方程如下
式中,z1和z2分別為垂直加速度和動靜載荷比,z=[z1 z2]表示性能輸出。
對飛機起落架系統(tǒng)的狀態(tài)方程(5),設計狀態(tài)反饋控制器為K期望阻尼力控制輸入滿足:
使閉環(huán)系統(tǒng)(15)從跑道激勵輸入到減震器垂直加速度的傳遞函數(shù)Gr(s)的范數(shù)最小,即:
式(18)中的范數(shù)是沿頻率軸上的最大值,而現(xiàn)在要使其最小,這個問題的解是遍歷所有的w,使所有最大奇異值都達到最小值γ0。控制器K(s)須使閉環(huán)系統(tǒng)內部穩(wěn)定,系統(tǒng)狀態(tài)滿足相應約束條件。如果系統(tǒng)內穩(wěn)定,則一定存在一個正定矩陣和對應的二次Lyapunov函數(shù)滿足式子。對于給定的,若存在矩陣,對稱矩陣Q,X,Z,使得下述規(guī)劃問題
則狀態(tài)反饋控制器K=YQ-1存在。
4 仿真結果分析
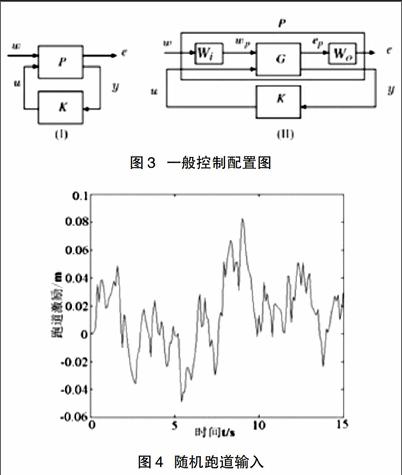
為了驗證所設計的半主動控制系統(tǒng)的有效性,取飛機各參數(shù)如下表1進行仿真分析。將被動控制、天棚控制和控制進行仿真,可得到不同跑道下的狀態(tài)響應。圖4為飛機著陸時的隨機跑道激勵輸入。
圖5為機身垂直加速度響應,從圖中可以看出天棚比被動控制效果好,采用控制更好的降低機身垂直加速度,保護機身結構和提高乘客的舒適性。
圖6說明半主動控制能減少機身的位移,其中控制效果非常明顯。從圖7可以看出起落架動撓度在控制時比被動控制要減小。圖8說明三種方式下的輪胎動載荷基本一致,效果較好。圖9給出了不同時刻減震器輸出的控制力。減震器最大輸出力由其自身結構特性所決定,最小輸出力為被動時的油液阻尼力。
5 結語
在本文中,對兩個自由度下的飛機起落架進行了天棚和控制的半主動控制方法研究。在魯棒控制理論基礎上設計了一種控制器,并且將其與被動控制和天棚控制進行比較分析。仿真結果表明,在飛機著陸撞擊時,使用控制方法的半主動磁流變減震器起落架系統(tǒng)能很好的改善飛機著陸對機身結構沖擊和乘客舒適度的影響。
參考文獻:
[1]酈正能,程小全.飛機部件與系統(tǒng)設計[M].北京:北京航空航天出版社,2006.
[2]Carlson J D,Catanzarite D M,St Clair K A. Commercial magneto-rheological fluid devices devices[J].International Journal of Modern Physics B,1996,10(23-24):2857-2865.
[3]Keum-Shik Hong. Modified Skyhook Control of Semi-Active Suspension:A New Model,GainScheduling,an Hardware-in-the-loop Tuning [J].Transactions of the ASME,2002,12 (4):158-167.
[4]Eltantawie M A.Forward and inverse fuzzy ma-gnetorheological damper models for controlpurpos- es[J].ICGST-ACSE,2010,10(1):1-9.
[5]周強,瞿偉廉.MR阻尼器的兩種力學模型和試驗驗證[J].地震工程與工程振動,2002,22(4):144—150.
[6]周云,譚平.磁流變阻尼控制理論與技術[M].北京:科學出版社,2007.
[7]聶宏,魏小輝.飛機起落架動力學設計與分析[M].西安:西北工業(yè)大學出版社,2013.
[8]趙云堂,陳思忠.磁流變半主動懸架的天棚控制方法研究[J].汽車工程學報,2011,1(2):127-133.
[9]Ajinkya A. Gharapurka. Semi-Active Control of Aircraft Landing Gear System UsingH-infin- ity Control Approach[C]. 2013 International Conference on Connected Vehicles and Expo (ICCVE):679-686.
[10]Damien Sammier.Skyhook and H8 Control of Semi-activeSuspensions: Some Practical Asp-ects[J].Vehicle System Dynamics ,2003, Vol.39(4): 279-308.
[11]盧亞慧.基于磁流變阻尼器雙曲正切逆模型的半主動懸架控制研究[D].哈爾濱:哈爾濱工業(yè)大學,2015,3(4):33-36.
猜你喜歡
現(xiàn)代經(jīng)濟信息(2016年19期)2016-10-20 17:15:21
商業(yè)會計(2016年13期)2016-10-20 15:43:05
中國科技博覽(2016年19期)2016-10-19 13:43:31
中國科技博覽(2016年19期)2016-10-19 12:09:22
中國科技博覽(2016年18期)2016-10-19 08:58:33
中國科技博覽(2016年18期)2016-10-19 08:43:03
科技視界(2016年21期)2016-10-17 17:06:18
商(2016年27期)2016-10-17 05:41:05
科學與財富(2016年28期)2016-10-14 20:57:11
大眾理財顧問(2016年9期)2016-10-11 17:10:17
