液壓缸非線性剛度約束系統的混沌預測及控制
2017-03-14 03:49:48劉浩然姜甲浩
中國機械工程 2017年5期
關鍵詞:系統
劉 彬 李 鵬 劉 飛 劉浩然 姜甲浩
1.燕山大學電氣工程學院,秦皇島,0660042.燕山大學信息科學與工程學院,秦皇島,066004
液壓缸非線性剛度約束系統的混沌預測及控制
劉 彬1李 鵬1劉 飛2劉浩然2姜甲浩1
1.燕山大學電氣工程學院,秦皇島,0660042.燕山大學信息科學與工程學院,秦皇島,066004
針對液壓缸非線性剛度約束系統的混沌問題,建立了一種液壓缸非線性剛度約束系統的動力學控制模型,通過Melnikov方法得到了液壓缸非線性剛度約束系統發生Smale馬蹄變換意義下混沌的臨界條件。通過仿真分析發現,當線性控制參數發生變化時,系統發生混沌的臨界條件也會發生變化,同時當線性控制參數增大時,系統的穩定性會得到提高。
液壓缸;約束系統;Melnikov方法;混沌;控制
0 引言
在實際液壓系統中,整個系統所有的元部件都具有非線性,只是所呈現的程度略有不同,因此理想的線性系統是不存在的。在液壓系統中,含有許多非線性因素,例如閥的靜態特性、死區、飽和、非線性增益、齒隙和摩擦等,所以液壓系統是一個非線性動力學系統,其運行過程中因油液的可壓縮性而形成的動態液壓剛度、液壓剛度的非線性會使運動過程中系統的固有頻率不恒定,響應穩定區域變得復雜,從而影響系統的穩定運行[1-2]。
國內外學者對液壓系統動態特性的研究所依據的理論多是經典控制理論和線性動力學理論。其中,SEO等[3]采用反饋線性化控制液壓傳動系統,替代真實系統中非線性因素,同時改善了PID控制的精度和瞬態響應。傅曉云等[4]以某水下航行器舵機液壓伺服系統為研究對象,通過簡化建立了舵機液壓系統的線性化模型,對該液壓伺服系統的動態響應特性、抗干擾能力進行了仿真分析。文獻[5-7]以控制閥為研究對象,從單一元件的角度分析問題,探索了因控制閥相關參數的改變而引起的自激振動、分岔和混沌等非線性動力學行為[5-7]。王林鴻等[8-9]用混沌理論中的相空間重構、關聯維數和最大Lyapunov指數等非線性動力學研究方法,對貌似隨機的液壓缸運行的動態時間序列信號進行分析,揭示了其混沌振動特征。
本文以液壓缸非線性剛度約束作用下的系統為研究對象,建立了一種液壓缸非線性剛度約束系統的動力學控制模型,著重研究了液壓缸非線性剛度約束系統的混沌預測,同時引入線性控制參數,分析了線性控制參數對系統穩定性的影響。
1 液壓缸非線性彈簧力
本文主要考慮一類雙作用單活塞液壓缸非線性剛度約束系統的振動特性,該種液壓缸只在活塞的一側裝有活塞桿,因而兩腔的有效面積不同,往返的運動速度和作用力也不相等,液壓缸活塞運動改變了兩腔液體的有效長度,引起了液壓油的剛度變化。由于活塞桿的彈性模量是液壓油彈性模量的近百倍,故可將活塞桿視為剛體,液壓缸等效剛度主要表現為液壓油的剛度。其變化規律為[8]
(1)
式中,a、b為液壓缸的工況參數;L為液壓缸的有效行程;βe為液壓油的體積模量;Ai為液壓缸活塞兩側的有效面積,i=1,2;L1為無桿腔的初始有效長度;x為系統顫振位移,為量綱一的量;Vil為閥與缸某一側之間液壓管路中液壓油的體積,i=1,2。
以式(1)所示的液壓缸動態剛度模型為例,對其在原點(液壓缸處于未工作狀態時活塞的位置,即活塞的初始位置)處進行泰勒級數展開:
(2)
式中,k1為無桿腔的等效剛度;k2為有桿腔的等效剛度。
彈簧彈性勢能U具有對稱性,可以表示為
(3)
則彈簧力可以表示為
(4)
彈簧力F1(x)可以表示為
F1(x)=κ1x+κ2x3
(5)
2 約束系統的動力學線性控制模型
考慮一類液壓缸非線性剛度約束作用,建立一類液壓缸非線性剛度約束作用下的系統動力學控制模型,如圖1所示,其中,m為系統的等效質量,c為系統的線性阻尼系數,k為系統的線性剛度系數,k(x)為液壓缸的非線性剛度,F為外激勵幅值,ηα為引入系統的控制輸入量,常數η為控制器輸入方向,α為控制器參數。根據廣義Lagrange原理,可以列出液壓缸非線性剛度約束系統量綱一動力學平衡方程如下:
(6)

圖1 系統動力學控制模型Fig.1 The dynamic control model of the system
圖1所示模型中考慮一類雙作用單活塞液壓缸非線性剛度k(x)的約束作用,同時系統加入線性控制輸入量ηα對系統進行反饋控制。
3 非線性剛度約束系統的穩定性分析
為便于計算,將系統動力學方程(式(6))簡化成如下形式:
(7)
將式(7)寫為狀態方程形式:
(8)
其中,ε為一個小的量綱一參數。
當ε=0時,系統為一個Hamilton系統[10],其Hamilton量為
(9)
由無阻尼未擾動方程
(10)
式(10)的微分形式為
(11)
可以得到系統的特征方程為
(12)
從而可得
(13)


由圖2可以看出:當τ<0、κ2>0時,系統有兩條同宿軌,同宿軌內部的奇點是中心,同宿軌內部的軌道是包圍一個中心的閉軌,而同宿軌外部的軌道是包圍三個奇點的閉軌。由圖3可以看出:當τ>0、κ2>0時,系統是一個單勢阱的系統,系統只有一個平衡點(0,0)——中心,此時系統做穩定的周期運動,不存在Smale馬蹄意義下的混沌。因此,本文以下內容主要分析當τ<0、κ2>0時系統存在Smale馬蹄意義下混沌的情況。
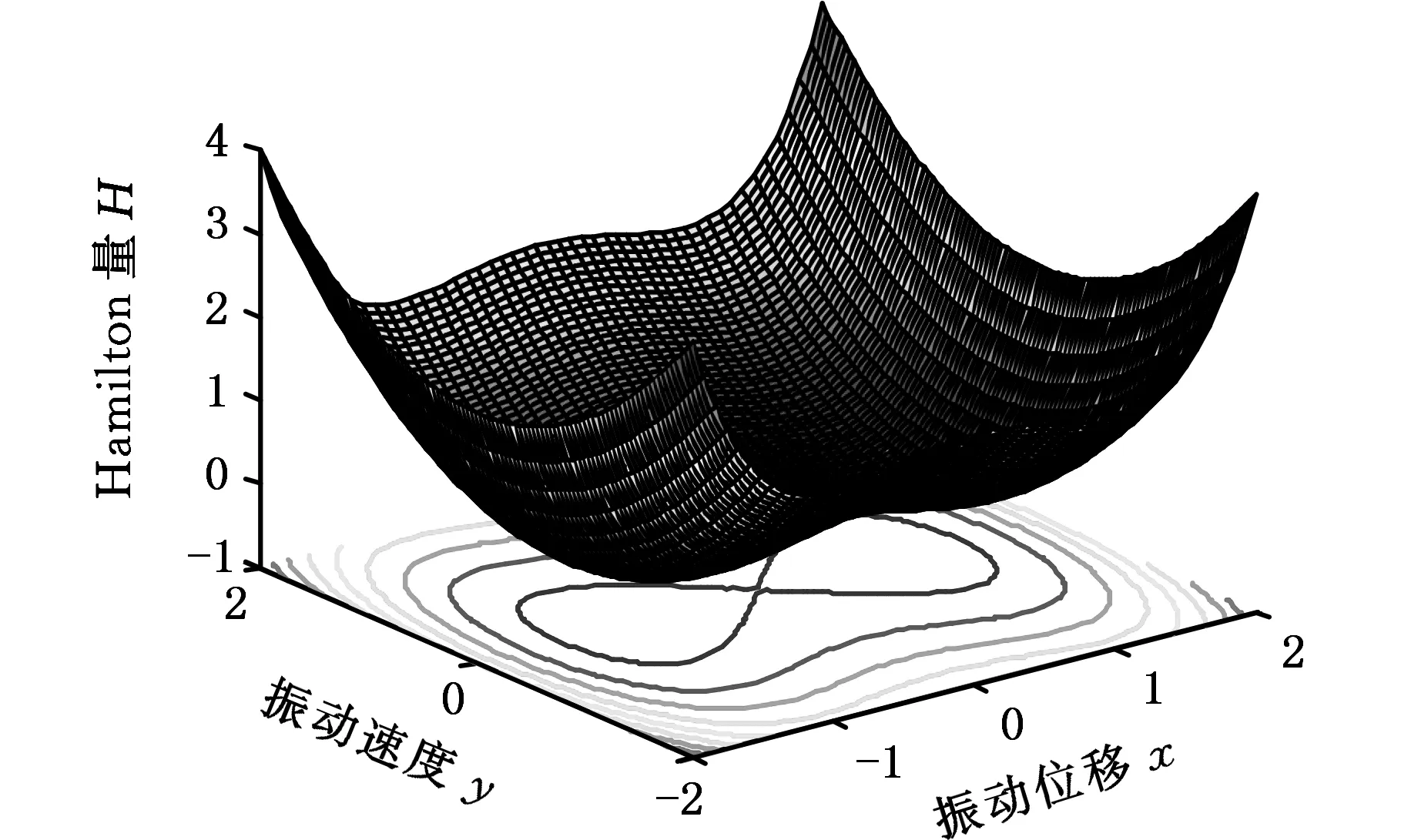
(a)勢能曲面
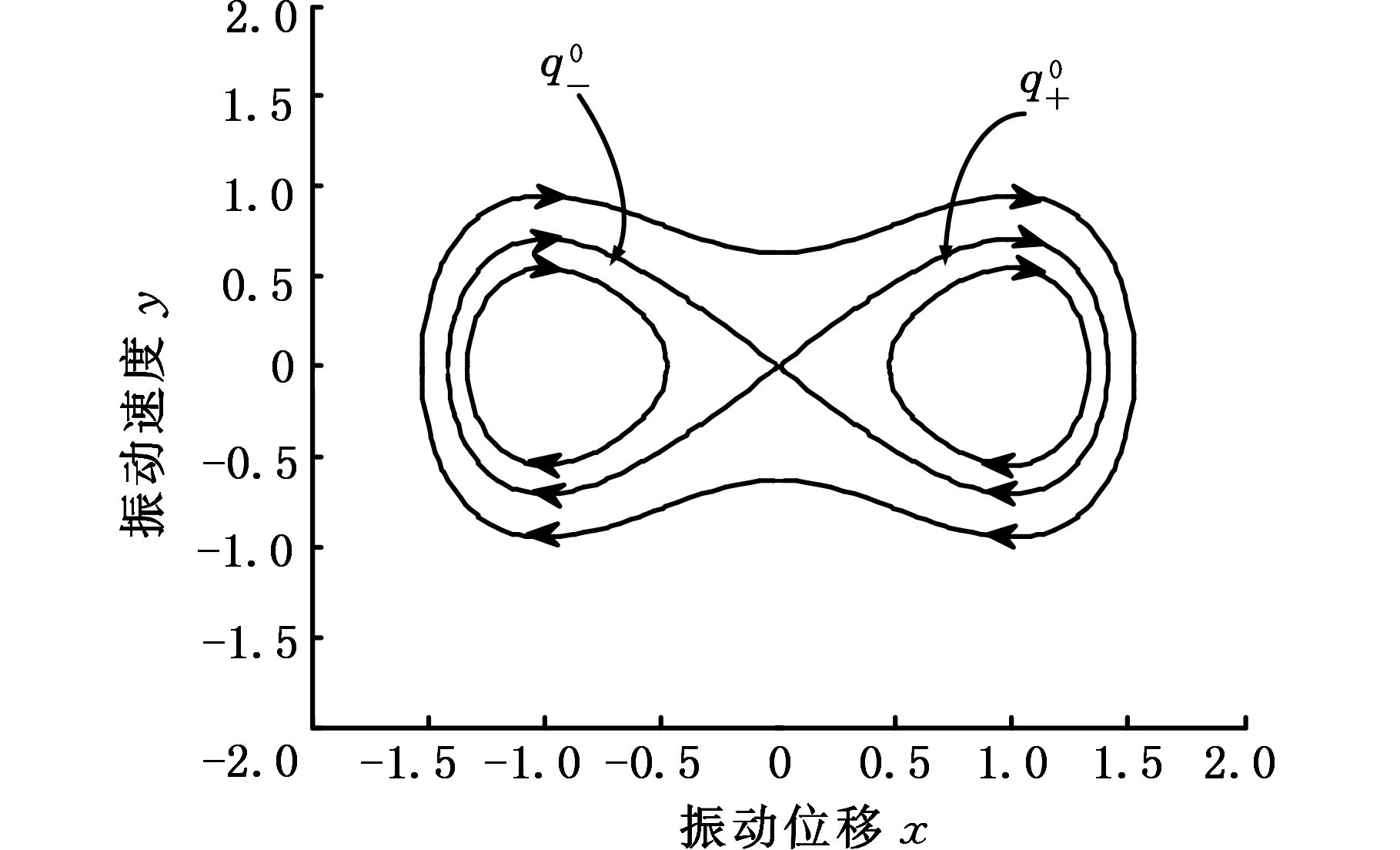
(b)相軌跡圖2 當τ<0,κ2>0時系統的勢能曲面和相軌跡Fig.2 Potential energy surface and phase trajectory of the system when τ <0,κ2>0

(a)勢能曲面

(b)相軌跡圖3 當τ>0,κ2>0時系統的勢能曲面和相軌跡Fig.3 Potential energy surface and phase trajectory of the system when τ>0,κ2>0
4 系統的混沌預測
(14)
所以有
(15)

(16)
通過積分可得出兩條同宿軌道關于時間的表達式:
(17)
同宿軌道對應的Melnikov函數為
(18)

(19)
最后得到
(20)
當M(t0)=0時,可以得到
(21)
經過化簡可以得到
(22)
混沌無處不在,無時不有,只是它的顯現需要條件,當液壓系統超出所謂的常態時,液壓系統漸變或突變為混沌狀態。系統由常態轉變為混沌的臨界值,稱為系統產生混沌的臨界條件。顯然,當式(23)成立時,所考慮的擾動系統具有Smale馬蹄變換意義下的混沌。據此可以計算出該系統發生混沌行為時的臨界參數值,進而根據系統參數與系統發生混沌的臨界條件關系,預測系統混沌的發生。
5 仿真分析
針對式(6)液壓缸非線性剛度約束作用下系統量綱一動力學平衡方程,取仿真參數m=1、c=0.3、k=0.2、κ1=-1.2、κ2=1、ω=1.2。以下對液壓缸非線性剛度約束作用下的系統混沌特性進行仿真分析。
5.1 混沌預測分析
根據式(22)所示的系統發生混沌的臨界條件關系,在其他參數不變情況下,選取不同的控制輸入量ρ,分析系統混沌臨界條件的變化規律。按照式(22)所示的混沌預測條件可計算得到控制參數ρ取不同值時的混沌發生條件,如表1所示。

表1 不同控制參數下的混沌條件Tab.1 Chaotic conditions under different control parameters
當選取不同控制參數ρ時,以外激勵幅值F為分岔參數,通過系統的分岔圖,分析不同控制參數下系統發生混沌的臨界條件。
從圖4~圖7可以看出,當控制參數ρ=-0.4時,系統分岔行為隨外激勵幅值F變化而變化。隨著外激勵幅值F的增大,系統的分岔行為如下:周期運動→陣發性混沌→倍周期運動→混沌運動。由表1可以看出,當控制參數ρ=-0.4時,計算得到系統發生Smale馬蹄變換意義下混沌的外激勵幅值條件為F≥0.2527,通過將此時的系統分岔圖與表1對照分析可知系統在F≥0.2527時進入混沌。
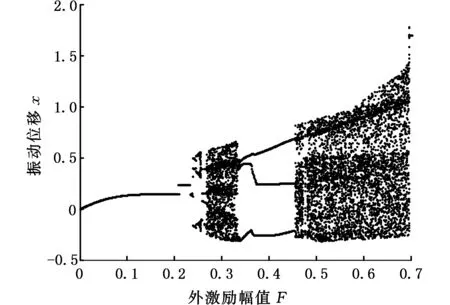
圖4 ρ=-0.4時的系統分岔圖Fig.4 System bifurcation diagram when ρ=-0.4
由圖5可以看出,當控制參數ρ=0時,系統分岔行為隨外激勵幅值F的變化而變化。隨著外激勵幅值F的增大,系統的分岔行為如下:周期運動→陣發性混沌→倍周期運動→混沌運動→倍周期運動→混沌運動。由表1可以看出,當控制參數ρ=0時,計算得到系統發生Smale馬蹄變換意義下混沌的外激勵幅值條件為F≥0.3182,通過將此時的系統分岔圖與表1對照分析可知系統在F≥0.3182時進入混沌。
由圖6可以看出,當控制參數ρ=0.4時,系統分岔行為隨外激勵幅值F變化而變化。隨著外激勵幅值F的增大,系統的分岔行為如下:周期運動→倍周期運動→混沌運動→倍周期運動→混沌運動。由表1可以看出,當控制參數ρ=0.4時,計算得到系統發生Smale馬蹄變換意義下混沌的外激勵幅值條件為F≥0.3914,通過將此時的系統分岔圖與表1對照分析可知系統在F≥0.3914時進入混沌。

圖5 ρ=0時的系統分岔圖Fig.5 System bifurcation diagram when ρ=0
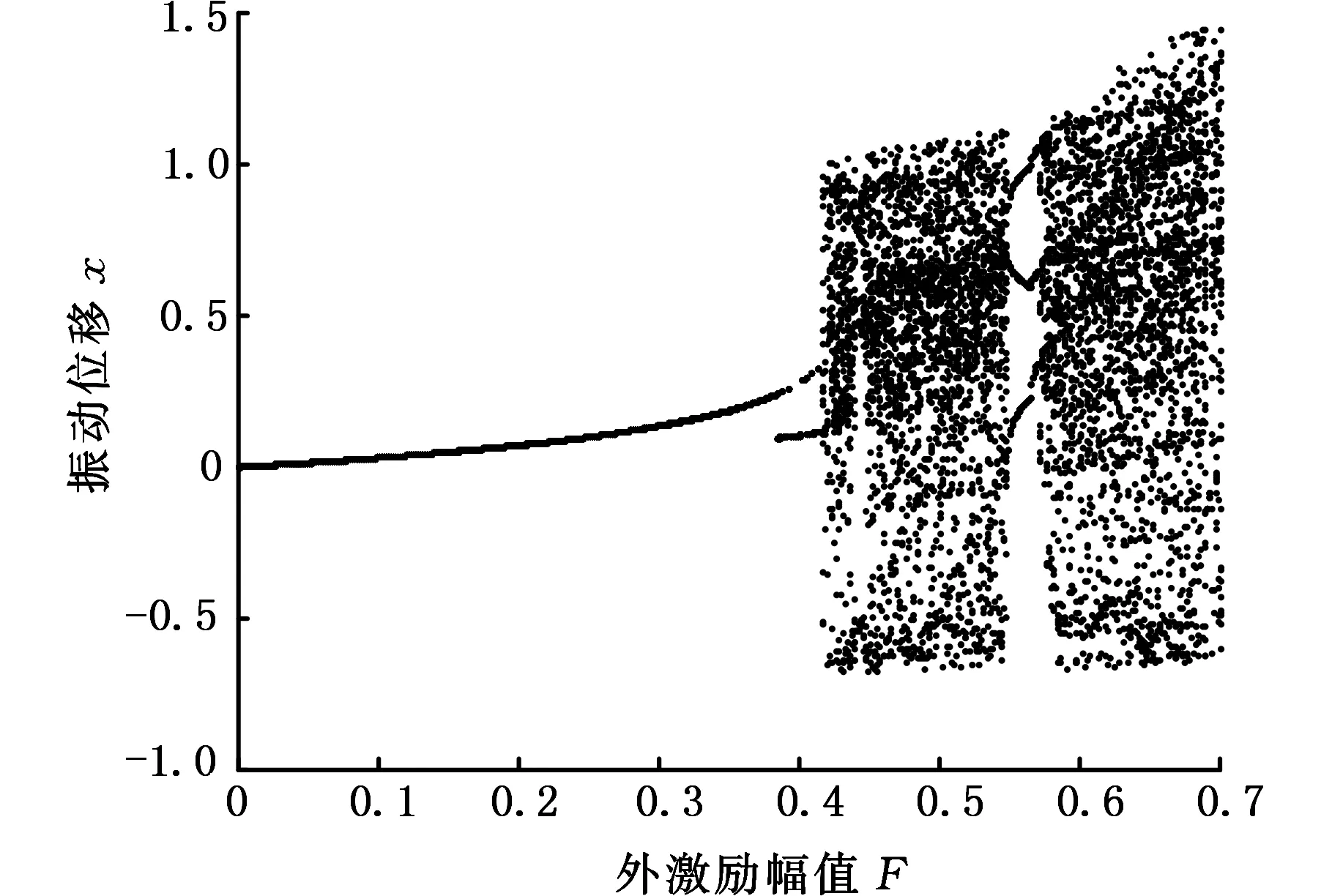
圖6 ρ=0.4時的系統分岔圖Fig.6 System bifurcation diagram when ρ=0.4
結合表1的計算結果和圖4~圖6所示的分岔圖可知,隨著線性控制參數ρ的增大,系統發生混沌的臨界外激勵幅值F增大。

圖7 ρ變化時的分岔特性Fig.7 Bifurcation characteristic when the ρ changes
5.2 控制分析
圖7~圖10為線性控制參數ρ不同時系統的分岔特性圖。當F=0.3時,以線性控制參數ρ為分岔參數,通過系統的分岔圖、相圖和Poincare截面,分析系統隨線性控制參數ρ變化的規律。
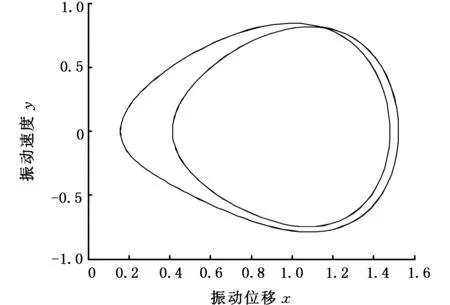
從圖7可以看出,當線性控制參數ρ處于區間-0.5~1.5時,隨著線性控制參數ρ的增大,系統的分岔行為由混沌運動逐漸轉變為周期運動。在圖8~圖10中,當線性控制參數ρ=-0.2時,系統Poincare截面是一些有界的離散點集,表明系統是混沌運動。當線性控制參數ρ=0.22時,系統出現倍周期運動,而對應的Poincare截面為一個孤立的點。當線性控制參數ρ=0.4時,可看出系統相圖為一封閉曲線,在Poincare截面上表現為一孤立的點,說明此時系統為周期運動。

(a)相圖
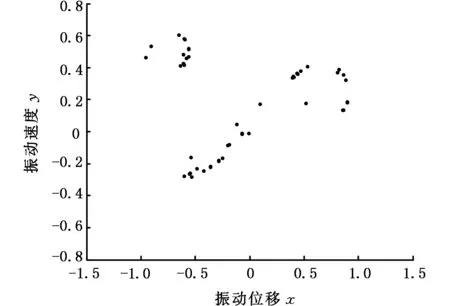
(b)Poincare截面圖8 ρ=-0.2時系統的相圖和Poincare截面Fig.8 Phase diagram and Poincare section of the system when ρ=-0.2
結合圖7~圖10的分岔圖、相圖和Poincare截面可以發現,適當地增大系統的線性控制參數ρ,可以提高系統的穩定性。
6 結論
(1)考慮液壓缸的非線性剛度約束作用,建立了一種液壓缸非線性剛度約束系統的動力學控制模型。
(a)相圖
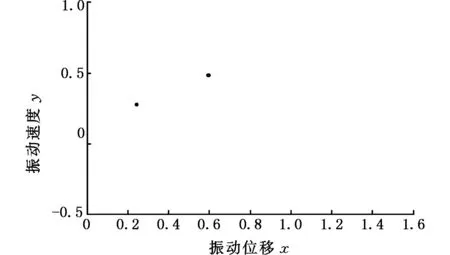
(b)Poincare截面圖9 ρ=0.22時系統的相圖和Poincare截面Fig.9 Phase diagram and Poincare section of the system when ρ=0.22

(a)相圖
(b)Poincare截面圖10 ρ=0.4時系統的相圖和Poincare截面Fig.10 Phase diagram and Poincare section of the system when ρ=0.4
(2)在此動力學控制模型的基礎上,建立了系統的量綱一動力學平衡方程,通過系統Melnkikov函數得到了系統發生Smale馬蹄變換意義下混沌的臨界條件。仿真分析了不同線性控制參數ρ對系統發生Smale馬蹄變換意義下混沌臨界條件的影響。
(3)分析了線性控制參數ρ變化下系統的分岔特性,得到了在一定范圍內,隨著線性控制參數ρ的增大,系統逐漸由混沌運動轉變為穩定的周期運動。研究結果為這一類液壓缸非線性約束系統的動力學控制提供了理論參考。
[1]BIYanhong,LUORuiying,LIJinsong,etal.TheEffectsoftheHydraulicOilonMechanicalandTribologicalPropertiesofC/CComposites[J].MaterialsScienceandEngineering, 2008, 483/484: 274-276.
[2] 朱勇,姜萬錄,劉思遠,等. 非線性液壓彈簧力對電液伺服系統非線性動力學行為影響的研究[J]. 中國機械工程, 2015, 26(8): 1085-1091.ZHUYong,JIANGWanlu,LIUSiyuan,etal.ResearchonInfluenceofNonlinearHydraulicSpringForceonNonlinearDynamicBehaviorsofElectro-hydraulicServoSystem[J].ChinaMechanicalEngineering, 2015, 26(8): 1085-1091.
[3]SEOJ,VENUGOPALR,KENNéJP.FeedbackLinearizationBasedControlofaRotationalHydraulicDrive[J].ControlEngineeringPractice, 2007, 15(12): 1495-1507.
[4] 傅曉云,黎飛,李寶仁. 某水下航行器舵機液壓伺服系統建模仿真[J]. 機床與液壓, 2010, 38(13): 151-153.FUXiaoyun,LIFei,LIBaoren.MathematicalModelingandSimulationofaUVHydraulicSteeringGearServoSystem[J].MachineTool&Hydraulics, 2010,38(13): 151-153.
[5]HAYASHIS.NonlinearPhenomenainHydraulicSystems[C]//ProceedingsoftheFifthInternationalConferenceonFluidPowerTransmissionandControl.Sendai, 2001: 28-32.
[6]MISRAA,BEHDINANK,CLEGHORNWL.Self-excitedVibrationofaControlValveduetoFluid-structureInteraction[J].JournalofFluidsandStructures, 2002, 16(5): 649-665.
[7]LICSKOG.NonlinearAnalysisofaSingleStagePressureReliefValve[J].InternationalJournalofAppliedMathematics, 2009, 39(4): 4-12.
[8] 王林鴻,吳波,杜潤生,等. 液壓缸運動的非線性動態特征[J]. 機械工程學報, 2007, 43(12): 12-19. WANG Linhong, WU Bo, DU Runsheng, et al. Nonlinear Dynamic Characteristics of Moving Hydraulic Cylinder[J]. Chinese Journal of Mechanical Engineering,2007,43(12):12-19.
[9] 王林鴻,杜潤生,吳波,等. 數控工作臺的非線性動態特性[J]. 中國機械工程, 2006, 34(9): 118-122. WANG Linhong, DU Runsheng, WU Bo, et al. Nonlinear Dynamic Characteristics of NC Table[J].China Mechanical Engineering, 2009, 20(13): 1513-1519.
[10] 高普云. 非線性動力學-分叉、混沌與孤立子[M]. 北京:國防科學技術大學出版社, 2005:74-77. GAO Puyun. Nonlinear Dynamics-bifurcation, Chaos and Soliton[M]. Beijing: National University of DefenceTechnology Press, 2005:74-77.
[11] 劉彬, 趙紅旭, 侯東曉. 一類含三勢阱Mathieu-Duffing振子的相對轉動系統的分岔和混沌[J]. 物理學報, 2014, 63(17): 180-188. LIU Bin, ZHAO Hongxu, HOU Dongxiao. Bifurcation and Chaos of Some Relative Rotation System with Triple-well Mathieu-duffing Oscillator[J]. Acta Physica Sinica, 2014, 63(17): 180-188.
[12] Vassilios M, Antonopoulos R C, Drossos L. Chaos in a Near-integrable Hamiltonian Lattice[J]. International Journal of Bifurcation and Chaos, 2002, 12(8): 1743-1754.
(編輯 王艷麗)
Chaotic Prediction and Control of Hydraulic Cylinder Nonlinear Stiffness Constraint System
LIU Bin1LI Peng1LIU Fei2LIU Haoran2JIANG Jiahao1
1.School of Electrical Engineering, Yanshan University, Qinhuangdao, Hebei, 066004 2.School of Information Science and Engineering, Yanshan University, Qinhuangdao, Hebei,066004
For the chaos of nonlinear stiffness constraint system of a hydraulic cylinder, a kind of dynamic control model of hydraulic cylinder nonlinear stiffness constraint system was established. The critical conditions of chaos in nonlinear stiffness constraint system of the hydraulic cylinder in the sense of Smale’s horseshoe transformation were obtained by Melnikov method. Through simulation analyses, it is found that when the linear control parameters are changed, the critical conditions for the occurrence of chaos in the system will also change. At the same time, the stability of the system may be improved when the linear control parameters are increased.
hydraulic cylinder; constraint system; Melnikov method; chaos; control
2016-04-19
河北省自然科學基金資助項目(E2015203349)
TH113;O322
10.3969/j.issn.1004-132X.2017.05.009
劉 彬,男,1953年生。燕山大學電氣工程學院教授、博士研究生導師。主要研究方向為軋機振動及測量技術。發表論文50余篇。E-mail:liubin@ysu.edu.cn。李 鵬,男,1990年生。燕山大學電氣工程學院碩士研究生。劉 飛,男,1986年生。燕山大學信息科學與工程學院博士研究生。劉浩然,男,1980年生。燕山大學信息科學與工程學院副教授。姜甲浩,男,1991年生。燕山大學電氣工程學院碩士研究生。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32