國產水下滑翔機2014年南海海試實驗數據分析
2017-03-14 08:00:22俞建成司廣成
海洋技術學報 2017年1期
任 強,于 非,李 碩,俞建成,司廣成
(1.中國科學院海洋研究所 環境工程中心,山東 青島 266071;2.中國科學院沈陽自動化研究所,遼寧 沈陽 110000)
國產水下滑翔機2014年南海海試實驗數據分析
任 強1,于 非1,李 碩2,俞建成2,司廣成1
(1.中國科學院海洋研究所 環境工程中心,山東 青島 266071;2.中國科學院沈陽自動化研究所,遼寧 沈陽 110000)
水下滑翔機(Underwater Glider)是將浮標、潛標技術以及水下機器人技術相結合并依靠自身浮力和重力作為推進方式的一種新型海洋調查系統。文中詳細介紹了中國科學院自動化研究所研制的水下滑翔機的組成部分及其工作方式和原理,并對2014年6月南海海試的數據進行了分析。結果表明,Glider的下降和上升速度主要分布在0.1~0.2m/s之間,占整體分布的85%以上;該速度分布對獲取高質量的數據提供了極大保障。單剖面完成時間以及出入水的水平距離主要受滑翔機的預設浮力以及俯仰角的變化以及洋流的影響。獲取的高分辨率溫鹽數據結果表明,Glider發現了南海表層存在的一個中尺度暖渦過程,并就該暖渦分析了其鋒面結構。海試總體結果表明,國產Glider的各項性能指標已經能夠滿足在深海海域實現無人值守的長時間自主海洋調查。
水下滑翔機;性能;暖渦
隨著科學技術的進步和國民經濟的發展,海洋探測已成為研究全球大氣、海洋及其相互作用關系的基本研究手段,海洋觀測設備由此日新月異地發展,在此基礎上研制各種先進的調查儀器,更好地應用于海洋學研究。
目前西方國家的先進海洋設備如水下滑翔機[1-3]、AUV等設備早已應用于全球大洋觀測,由于此類設備在深海海洋探測中的重要性,中國科學院沈陽自動化研究所自主開展水下滑翔機的研制工作[4]。2014年6月,國產水下滑翔機正式開始深海海試工作,各項測試指標正常且獲取了大量的高精度和高分辨率數據,標志著我國自主設計研制生產的水下滑翔機取得突破性進展。國產Glider的研制成功打破了國際上的長期封鎖,為我國海洋探測技術的發展以及海洋科學研究提供了重要的裝備支持,標志著海洋探測從大量科技人員現場調查獲取資料的時代邁向無人值守的時代,從根本上節約了人力、時間以及物質成本。此類海洋裝備的應用極大地豐富了海洋調查方式,同時其工作的優異性能獲取的高質量數據等也為我國的海洋科學研究提供基礎支持。
海洋中尺度過程[5-6]遍布全球,且對全球大洋環流、氣候等產生重要的影響。傳統中尺度過程的觀測主要借助于Argo浮標以及海面衛星高度計等系統。其中Argo浮標受限于系統無動力,無法實現自主航行,只能被動隨洋流移動,因而無法對中尺度過程等海洋現象實現自主觀測,而Glider的靈活自主性對實現中尺度過程、內波[7-8]等海洋現象觀測有很大幫助。
1 國產水下滑翔機介紹
1.1 國產水下滑翔機系統組成
水下滑翔機(Glider)是將浮標、潛標技術以及水下機器人技術相結合,依靠自身浮力和重力作為推進方式的一種新型海洋調查系統。中國科學院沈陽自動化研究所研制的水下滑翔機(圖1)系統主要由艏部艙段、姿態調節艙段、傳感器艙段以及艉部艙段等組成。其中艏部艙段主要有高度計、壓力傳感器等;姿態調節艙段主要有俯仰調節驅動裝置、電池組以及控制模塊等;傳感器艙段主要搭載如CTD、溶解氧、葉綠素濁度計、艙內濕度檢測等探測傳感器(其溫鹽深傳感器型號采樣的是美國seabird公司生產的SBE49);艉部艙段主要包括浮力調節裝置(油囊)、轉向裝置、拋載裝置(用于緊急情況下出水、定位系統(GPS、銥星和無線電模塊)等。其系統主要技術指標如表1所示,工作深度最大為1000m,正常航行速度為0.5 kn/h,最大可達1.0 kn/h,內置電池續航時間為30 d以上,2014年在南海海試最遠航行距離達到了1 000 km以上。
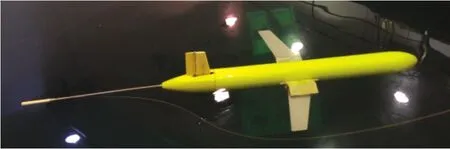
圖1 水下滑翔機實物圖
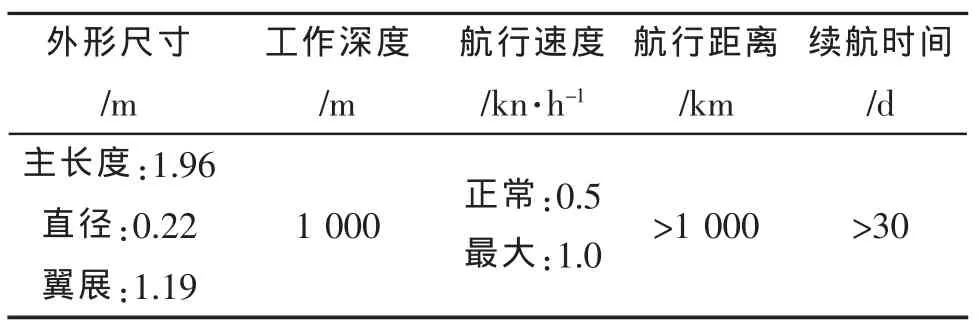
表1 國產水下滑翔機技術指標
1.2 滑翔機工作原理
滑翔機按照預定的路線和轉向點進行自動連續剖面測量以及航行,在母船甲板通過無線電輸入位置和坐標等信息。圖2為其工作模式簡圖,它的主要工作原理是通過浮力和俯仰角的調節,以控制滑翔機的上升和下降。滑翔機漂浮在水面的狀態中艉部通訊天線露出水面,本體與水面呈80°左右的傾角(艏部朝下),在下降的過程中,通過驅動泵抽出油囊中的油使滑翔機體積浮力變小,同時電池組改變位置調整俯仰角,此階段為下降浮力及俯仰角調整期,在此期間由于俯仰角的調節速度較慢,滑翔機的傾角過大而水阻較小,因此在開始下降的初始時期下降速度較大,其最大速度能達到0.9m/s,一般此階段在30~60m內完成。在俯仰角調整到預定角度之后,滑翔機與水平面傾角變小,水平翼受水體阻力大,速度下降趨于一個穩定值約為0.2m/s。滑翔機艏部裝有高度計探頭,如果到達設定離底閾值,系統自動采取措施停止下降以防止觸底,其重新調整電池組位置以及給油囊充油使浮力大于重力開始上升狀態。到達水面后,艉部天線出水發送GPS位置,系統根據出入水的GPS位置自動計算出矢量偏移即粗略估計流速大小和流向,因此在下一次下降過程中調整艉舵使其按照預定的航線進行工作。系統也可設定為不需要出水連續完成剖面測量,經多個剖面后再出水發送位置和數據等信息,在這種模式下有利于節省能量以及滑翔機自身的安全。

圖2 水下滑翔機工作模式
2 實驗工程數據分析
中國科學院沈陽自動化研究所研制的水下滑翔機于2014年6月在南海海南島東南部進行了海試試驗(圖4),本次試驗設置了4個轉向點,滑翔機實際路線依次為AB—BC—CD—DE—EB—BF,返回到BC線段中的F點,共完成了剖面數127個,航路總里程為500 km左右。
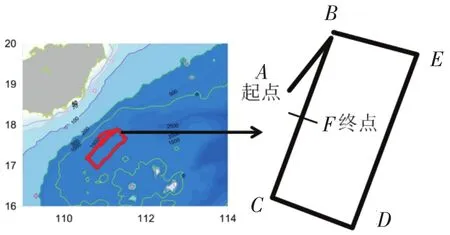
圖3 海試實驗區域及路線圖
2.1 滑翔機實際速度分布
圖4為實測滑翔機單個剖面的下降和上升速度情況,圖中顯示了滑翔機速度的變化過程及其水下工作模式特征。
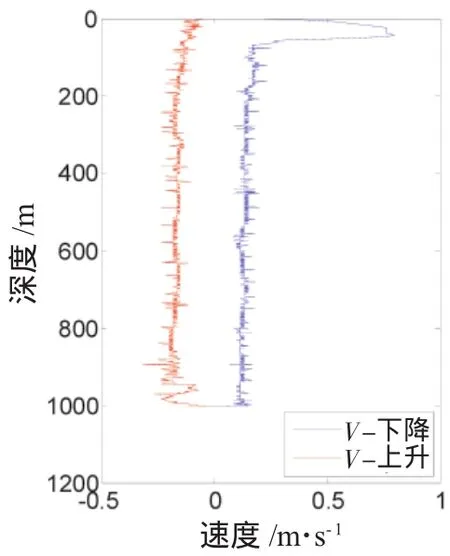
圖4 滑翔機剖面速度
2.2 下降及上升速度統計
圖5為滑翔機的速度統計分布情況,圖5(a)為各個剖面滑翔機下降最大速度及其對應的深度分布圖,最大速度分布在0.75~1.1 m/s之間而其對應的深度在20~60m之間,主要是在40m左右,其平均最大速度和平均深度分別為0.85 m/s和45 m,在此深度之間滑翔機完成了俯仰角、油泵以及尾舵角的調節。圖5(b)則是整個海試實驗過程中滑翔機下降和上升過程速度的統計分布圖,處于0.1~0.2m/s之間的速度占整體分布的85%以上,處于0.2~0.3m/s之間的速度占比相對較小,只有10%左右,而0~0.1 m/s之間的速度占比僅為4%,其中速度大于0.3 m/s的分布幾乎可以忽略。從下降和上升速度的分布來看,滑翔機總體速度在0.1~0.2 m/s內,且速度變化也較均勻,穩定均勻并且處在合適期間的剖面速度對于獲取高質量的數據提供了保障。
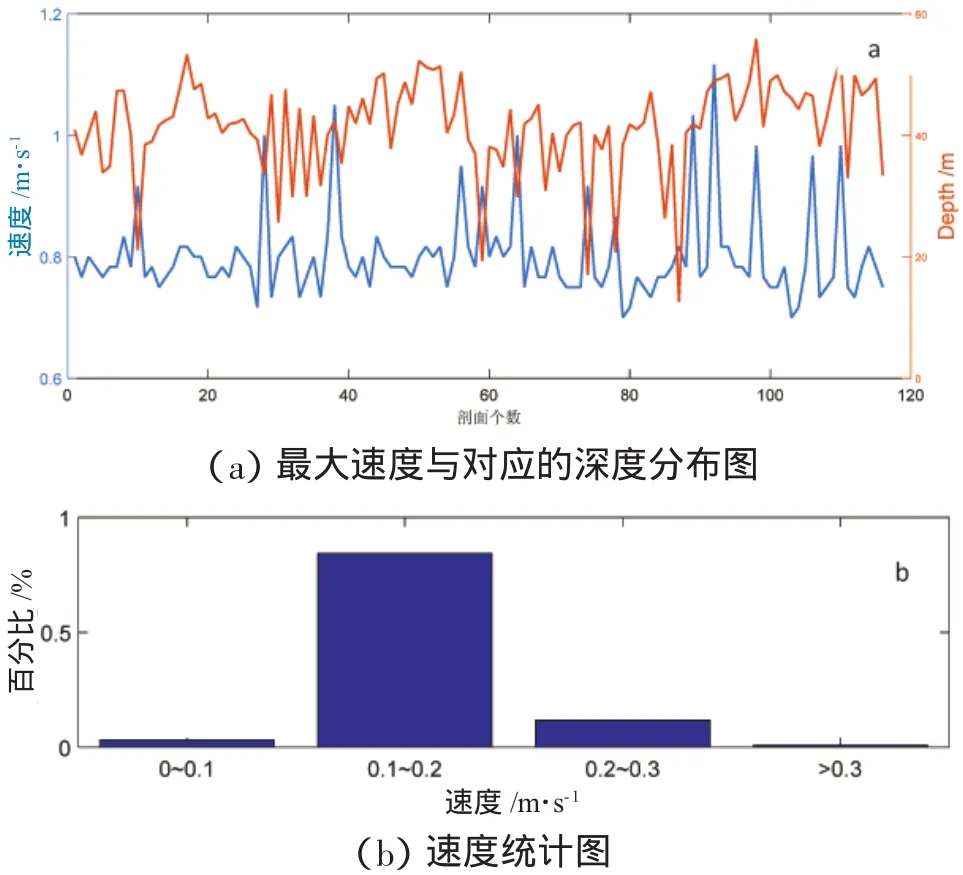
圖5 速度分布情況
2.3 剖面工程數據
全航程為127個剖面,對每組剖面的航向角、剖面完成時間以及水平距離進行統計對比(圖6),圖6(a)為系統預定航向角和實際航向角序列圖。圖中可以看到兩者基本一致,在ABCDEF等轉向點處航向角變化明顯,說明滑翔機按照預定的點航行路線無偏差。圖6(b)為單組剖面完成時間和水平距離序列圖,左側縱坐標為時間,右側縱坐標為水平距離。圖6(c)為滑翔機預設的俯仰角和浮力大小圖。統計結果可以看到完成下降和上升的單個剖面所需時間總體變化不大,時間約為200~240min之間,平均時間為220 min,而出入水位置距離變化較大,為2.5~6 km之間,平均距離為4 km左右。
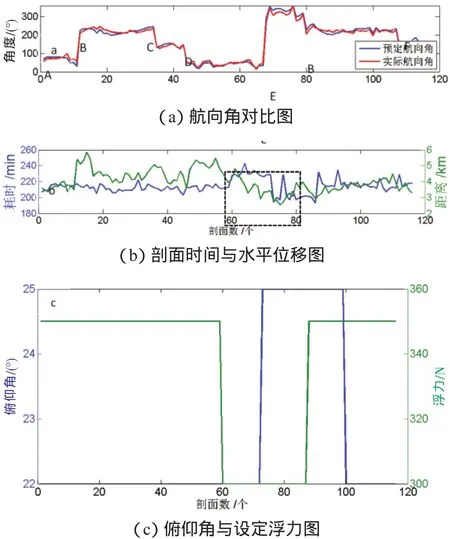
圖6 剖面工程數據
對于完成第60~80個剖面所需時間相對偏大,水平距離相對于全部剖面來說相對偏小,曲線呈先減小后增加的V字形走勢(圖中虛線框)。從圖6(c)可以看出在第60個剖面的時間點上設定的浮力從350 N減小到300 N,凈浮力的減小使沿滑翔機軸線的速度減小,在俯仰角不變的情況下水平速度和垂直速度也變小,從而使滑翔機的上升剖面時間增加和水平距離減小。同時也可看到在第73個剖面時間點上(對應的是水平距離V字形低值點)滑翔機的預設俯仰角從22°變成了25°,俯仰角變大使滑翔機上升下降過程整體受到的水阻力變小,滑翔機沿軸向速度增加即水平速度和垂直速度增加,剖面完成時間減小(耗時曲線可以看出來該點時間的突變),同時水平距離又開始增加。因而在這些剖面區間內,滑翔機的預設浮力以及俯仰角的變化是完成剖面所需時間以及出水水平距離均出現一定波動的原因,加上海洋中實際洋流的影響,因此兩者的波動受各方面因素疊加影響。
3 實驗數據及初步分析
圖7(a)為獲取的全航程共127個剖面溫度三維分布情況。圖7(b)為單剖面溫鹽情況。從圖中可知上下剖面的溫鹽基本重合,無異常值以及數據抖動情況出現,說明Glider在工作剖面模式下獲取的數據資料具有非常高的穩定性及精度,能夠滿足科研需求。
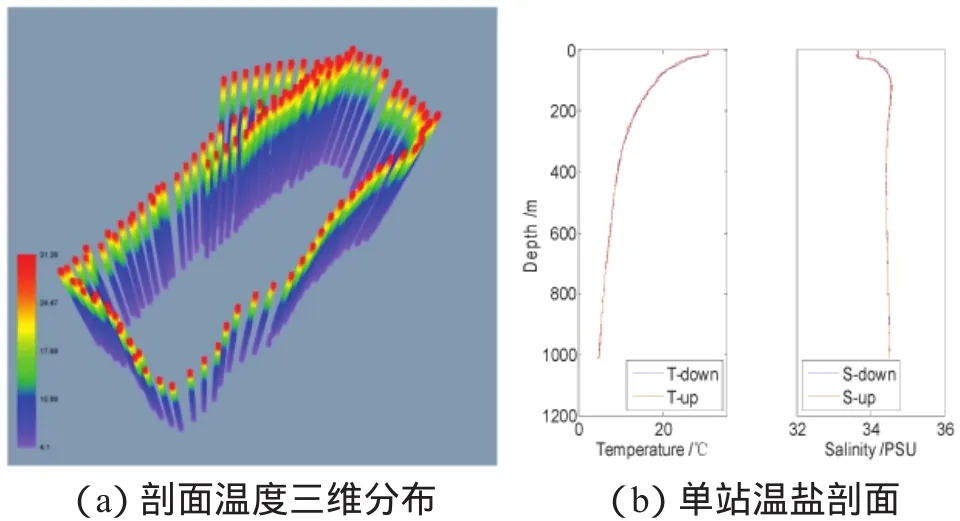
圖7 剖面溫度分布
南海主要受東亞冬夏季風影響而使其上層環流出現明顯的季節變化特征。冬季東北季風的盛行使南海的表層呈氣旋式環流結構,而在夏季則變成受從印度洋而來的西南季風影響而使表層環流呈反氣旋式。南海海區地形復雜,各種復雜海洋現象如中尺度渦以及內波等發生概率較大。中尺度過程主要包括渦旋、上升流和鋒面等海洋現象,同時它的出現一般對應的是海平面的劇烈變化[9-11]。
本文利用衛星高度計資料分析Glider海試期間南海海平面高度異常(SLA)。圖9為6月18日的平均海表高度異常分布情況,圖中顯示在6月18日南海表層存在2個正的SLA中心,其最大高度異常值為25 cm,渦中心范圍約為60 km。此現象對應的是中尺度的暖渦過程,2個暖渦分布為西南—東北方向。暖渦中心西北方向為鋒面區域。
Glider海試期間18日路徑(圖中實線處)為東南—西北走向,其正好位于該暖渦鋒面區。圖10為Glider所獲取的6月18日溫度分布圖(取上表層250m)。從圖中可以看出暖渦鋒面區溫度等值線分布規律為從左至右傾斜,即呈西部高溫等值線抬升而東部高溫等值線下壓走勢,西部表層30℃溫度等值線最大值位于15m左右,而東部表層30℃等值線則位于到30m處。表層100m以上等值線下壓較為明顯,而100 m以下等值線下壓趨勢減弱,在16℃等值線仍然存在微弱的下凹現象,說明觀測到的暖渦垂直尺度大概為200 m左右,考慮到該區域處于暖渦較邊緣位置,因而得到的暖渦垂直尺度較小,而越靠近暖渦中心其垂直尺度越大。北半球暖渦特征主要表現為反氣旋式順時針轉動,暖渦中心表層暖水下沉。以上現象均與北半球暖渦特征相對應,說明Glider在海試期間完整地觀測到一次中尺度暖渦過程并對暖渦結構有準確描述。
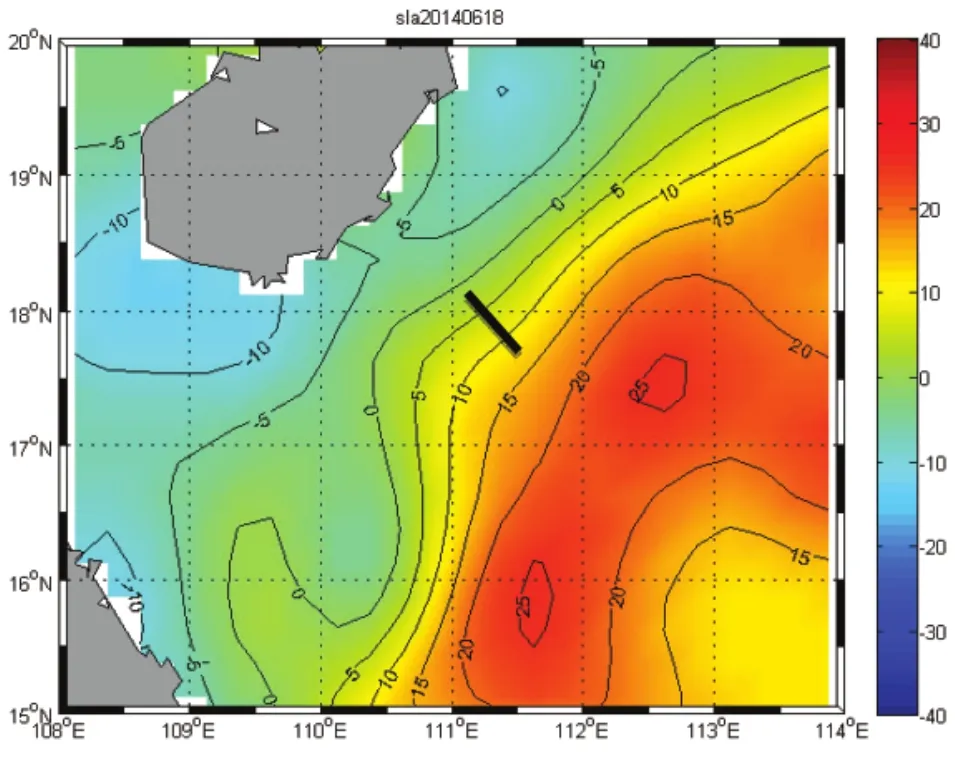
圖9 海平面高度異常
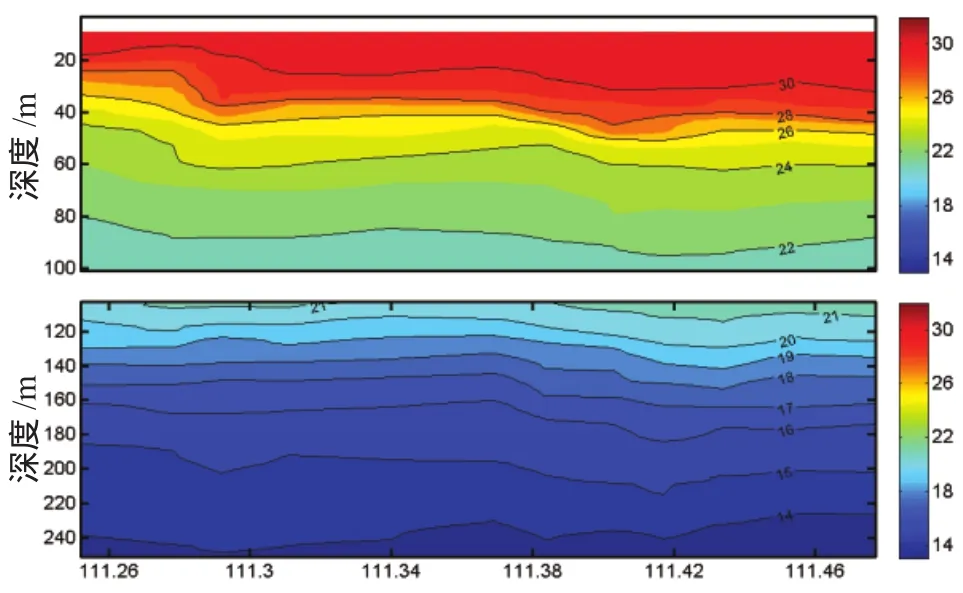
圖10 溫度斷面
4 結論
在2014年6月的南海深海海試過程中,國產水下滑翔機按照預定設計的路線自主工作,出水后整套系統通過精密配合完成航向的修正調整、姿態矯正、浮力設定等功能,并通過衛星向接收終端發送數據,其工作方式有利于科研人員隨時監控系統的工作狀態,同時在應急模式下能夠拋棄壓載裝置實現自主上浮,從最大程度上保障儀器自身安全。本次海試共行進水平里程為500 km,完成剖面數位128個,平均下潛深度達到1 100m。對其獲取的數據并結合衛星高度計資料進行綜合分析,發現了6月南海北部存在的南海中尺度暖渦過程,并對其鋒面的溫鹽結構有非常精細的描述。海試結果表明國產Glider的各項性能指標已經能夠滿足在深海海域實現無人值守的長時間自主海洋調查,同時能夠精確地觀測到中尺度過程等重大海洋現象。這為今后我國深海先進海洋裝備的研制打下堅實的基礎,積累豐富的經驗,同時也能極大地促進我國海洋基礎科學的研究。
[1]HasvoldΦ,Lian T,Haakaas E,etal.CLIPPER:A Long-Range,Autonomous Underwater Vehicle UsingMagnesium Fueland Oxygen from the Sea[J].JournalofPower Sources,2004,136(2):232-9.
[2]Jones EM,Oke PR,RizwiF,etal.Assimilation ofGliderand Mooring Data into a CoastalOcean Model[J].Ocean Modelling,2012,47: 1-13.
[3]Leonard NE,Paley DA,Davis RE,et al.Coordinated Control of an Underwater Glider Fleet in an Adaptive Ocean Sampling Field Experimentin Monterey Bay[J].Journalof Field Robotics,2010,27(6):718-40.
[4]Yu J-c,Zhang A-q,JinW-m,etal.Developmentand Experimentsof the Sea-Wing UnderwaterGlider[J].China Ocean Engineering, 2011,25(4):721-36.
[5]王桂華,蘇紀蘭,齊義泉.南海中尺度渦研究進展[J].地球科學進展,2005(08):882-6.
[6]張正光.中尺度渦[D].青島:中國海洋大學,2014.
[7]Duda T F,Lynch JF,Irish JD,etal.Internal Tide and Nonlinear InternalWave Behavior at the Continental Slope in the Northern South China Sea[J].IEEE JournalofOceanic Engineering,2004,29(4):1105-30.
[8]Liang X,WuW,Chang D,etal.Real-timeModelling of TidalCurrent for Navigating UnderwaterGlider Sensing Networks[J].Procedia Computer Science,2012,10:1121-6.
[9]Qiu C,Mao H,Yu J,etal.Sea Surface Cooling in the Northern South China Sea Observed Using Chinese Sea-Wing UnderwaterGlider Measurements[J].Deep Sea Research Part I:Oceanographic Research Papers,2015,105:111-8.
[10]高理.黑潮延伸區與南海的海平面異常及中尺度渦的統計分析[D].青島:中國海洋大學,2006.
[11]呂艷,張緒東,王慶業.由數據同化產品導出南海海表面高度的變化[J].海洋預報,2008,96(04):102-107.
Analysis on the Experimental Data Acquired from the Sea Tests for Domestic Underwater Glider in the South China Sea in 2014
REN Qiang1,YU Fei1,LIShuo2,YU Jian-cheng2,SIGuang-cheng1
1.R&D Center of Marine Environmental Engineering and Technologies,Institute of Oceanology,Chinese Academy of Sciences, Qingdao 266071,Shandong Province,China; 2.Shenyang Institute of Automation,Chinese Academy of Sciences,Shenyang 110000,Liaoning Province,China
Underwater glider is a new kind of system for oceanographic survey,which combines the technologies of buoy,subsurface buoy and underwater robot.It relies on its own buoyancy and gravity as propulsive forces. This paper introduces the components and the basic principles of the underwater glider developed by the Institute of Automation,Chinese Academy of Sciences in detail,and analyzes the data obtained from the glider tested in the South China Sea in June 2014.The results show that the falling and rising speeds of the glider are distributed mainly between 0.1 m/s and 0.2 m/s,accounting formore than 85%of the total distribution.This kind of speed distribution ensures the acquisition of high-quality data.The completion time of single profile and the horizontal displacementwhen the glider enters and leaveswater aremainly affected by the presupposed buoyancy and pitch angle variation of the glider aswell as ocean currents.High-resolution thermohaline data reveal the fact that the glider discovers a mesoscale warm eddy process on the surface layer of the South China Sea and analyzes its frontal surface structure.The overall results of the sea tests show that all the performance indicators of domestic underwater glider are able tomeet the requirement of unattended and independent oceanographic survey in deep waters for long period.
underwater glider;performance;warm eddy
P715.5
A
1003-2029(2017)01-0052-06
10.3969/j.issn.1003-2029.2017.01.010
2016-05-19
中國科學院戰略性先導科技專項資助項目(XDA11040201);國家自然科學基金委員會—山東省人民政府聯合資助海洋科學研究中心項目(U1406401);國家自然科學基金委員會—創新研究群體科學基金資助項目(41421005)
任強(1989-),男,碩士研究生,主要從事物理海洋學研究。E-mail:rqiocas1989@163.com