車用異步電機效率優化控制策略研究
2017-03-16 14:54:56林立朱赟駿趙海艷
山東工業技術 2017年3期
林立+朱赟駿+趙海艷


摘 要:為了提高車用異步電機系統的效率,增加一次充電續行里程,本文基于異步電機損耗模型,將異步電機損耗列為目標函數,得出輸入功率與轉子磁鏈、電磁轉矩和轉速的函數關系,基于偏微分理論,獲得最優控制磁鏈,實現基于損耗模型的異步電機最優磁鏈控制。建立系統仿真模型并進行仿真,仿真結果表明基于損耗模型最優磁鏈控制的異步電機系統效率獲得了一定程度的提升。
關鍵詞:電動汽車;異步電機;效率優化;損耗最小控制
DOI:10.16640/j.cnki.37-1222/t.2017.03.234
0 引言
隨著汽車工業的發展,環境污染和能源危機成為不可忽略的問題,發展新能源電動汽車具有廣闊的前景[1-2]。異步電機因結構簡單、可靠性高、價格便宜等優點,在軌道交通、電動汽車、暖通空調、風力發電等領域得到了廣泛應用,在電池大量儲能沒有根本解決的情況下,提高車用異步電機系統效率,增大一次充電續行里程,成為目前研究熱點[3-4]。本文基于異步電機損耗模型,將異步電機損耗列為目標函數,得出輸入功率與轉子磁鏈、電磁轉矩和轉速的函數關系,基于偏微分理論,獲得最優控制磁鏈,實現基于損耗模型的異步電機最優磁鏈控制。依據模型損耗最優磁鏈控制原理,建立系統仿真模型并進行仿真,仿真結果表明基于損耗模型最優磁鏈控制的異步電機系統效率獲得了一定程度的提升,從而可以增加一次充電續航里程,對于電動汽車的推廣具有重要的意義。
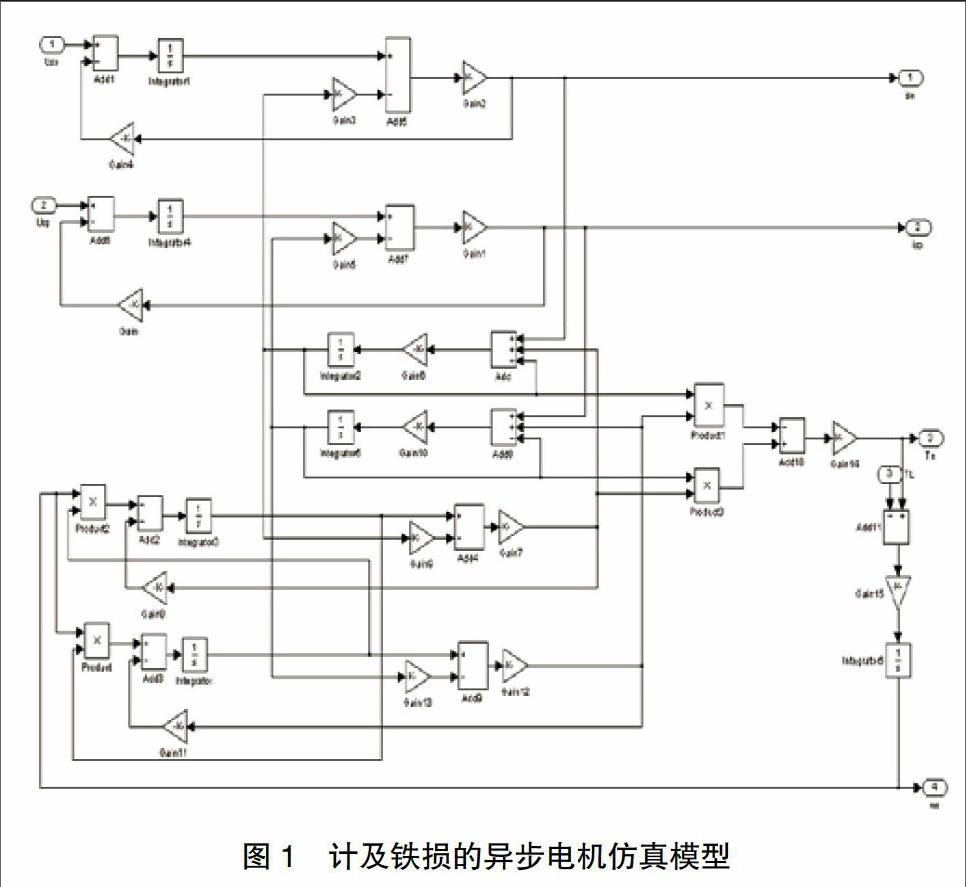
1 計及鐵損的異步電機仿真模型
常規異步電機控制一般不考慮鐵損,影響了異步電機的控制性能[5]。本文考慮計及鐵損的異步電機數學模型,開展鐵損和銅損平衡時效率優化控制研究,以提高系統運行效率。本文在靜止坐標系上建立考慮鐵損的異步電機數學模型,計及鐵損的異步電機模型,用一個純電阻代替定子鐵損,據此建立考慮鐵損的異步電機的仿真模型為:
2 損耗最小效率優化控制策略
2.1 損耗最小效率優化最優磁鏈
異步電機的損耗主要包括定子銅損、定子鐵損、轉子銅損、機械損耗和雜質損耗。本文主要是優化定子銅損、定子鐵損和轉子銅損,因此,根據電機原理和計及鐵損的異步電機模型將總損耗計算出來,得到一個關于轉子磁鏈的凹函數,具體如下:
2.2 損耗最小效率優化控制系統
損耗模型法控制策略是用求得的最優磁鏈去控制異步電機從而達到效率優化的一種算法。首先根據異步電機原理和計及鐵損的異步電機數學模型將異步電機損耗列成目標函數,得出輸入功率與轉子磁鏈、電磁轉矩和轉速的函數關系;然后對目標函數進行分析,得出在電磁轉矩和轉速穩定的前提下,目標函數是轉子磁鏈的凹函數。基于偏微分理論,求得函數最小值的最優磁鏈。最后將最優磁鏈作為系統設定去控制異步電機,從而達到效率優化的目的。損耗模型法控制策略的框圖如圖2所示。
3 系統仿真及結果分析
仿真參數如下:異步電機額定參數:電壓380V、頻率50Hz、極對數2,鐵損等效電阻Rm=5,定子電阻Rs=0.435,定子漏感Lls=0.002mH,轉子電阻Rr=0.816,轉子漏感Llr=0.002mH,互感Lm=0.069mH,轉動慣量J=0.19kg·m2 定子繞組自感Ls=Lm+Lls=0.069+0.002=0.071mH,轉子繞組上的自感為Lr=Lm+Llr=0.071mH,
控制參數:轉速調節器ASR的參數:比例放大器放大倍數為3.8,積分放大器放大倍數為0.8;轉矩調節器ATR的參數:比例放大器放大倍數為4.5,積分放大器放大倍數為12;磁鏈調節器AR的參數:比例放大器放大倍數為1.8,積分放大器放大倍數為100。
將上述參數代入系統模型,1.5秒后切入基于損耗模型法的控制策略。電機給定轉速為100r/min,負載轉矩為5N·m,仿真時間設為5s,仿真結果如圖3和圖4所示。
由仿真結果可知,經過1s后,電機穩定在100r/min,系統能夠按照轉速給定運行,轉矩能夠維持穩定,電磁轉矩等于負載轉矩為5N·m。由圖3可知,磁鏈由最初的1.5Wb經過尋優后下降到0.51Wb,跟理論值相吻合。
由以上分析可知:切入控制策略后,功率由最初的120W下降到112W,效率由最初的43.6%提高到47.0%,效率提高了3.4%。
4 結論
從仿真結果可以得到:將電機的轉速給定為100r/min,負載轉矩為5N·m時,基于損耗模型最優磁鏈控制的異步電機系統效率提高了3.4%,說明損耗模型法控制策略可以提高異步電機的效率,從而增加一次充電續航里程,對于電動汽車的推廣具有重要的意義。
參考文獻:
[1]王丹,續丹,曹秉剛.電動汽車關鍵技術發展綜述[J].中國工程科學,2013,15(01):68-72.
[2]程啟明,吳凱,王鶴霖.電動汽車技術的發展研究[J].電機與控制運用,2013,40(06):1-6.
[3]房康寧.基于矢量控制的異步電機效率優化控制研究[D].浙江:中國礦業大學,2014.
[4]張立偉.電動汽車用異步電機系統效率優化控制研究[D].北京:中國科學院研究生院,2005.
[5]蘆曉靜,溫旭輝.考慮鐵損的異步電機仿真建模[J].電機與控制運用,2005,32(08):3-6.
