基于預瞄模糊控制的自動泊車算法研究
2017-03-16 02:25:38熊周兵梁鋒華黎予生
重慶理工大學學報(自然科學) 2017年2期
熊周兵,楊 威,丁 可,梁鋒華,鄭 玲,黎予生
(1.重慶長安汽車股份有限公司 汽車研究總院,重慶 401120;2.重慶大學 機械傳動國家重點實驗室,重慶 400044)
基于預瞄模糊控制的自動泊車算法研究
熊周兵1,楊 威2,丁 可1,梁鋒華1,鄭 玲2,黎予生1
(1.重慶長安汽車股份有限公司 汽車研究總院,重慶 401120;2.重慶大學 機械傳動國家重點實驗室,重慶 400044)
針對目前自動泊車系統轉向不連續問題,提出一種兩段式泊車路徑規劃算法,采用Sigmoid函數對路徑進行函數擬合,確定泊車路徑。建立了橫向預瞄模型,對路徑追蹤誤差進行估計,采用模糊控制方法,對擬合后的理想路徑進行追蹤;搭建了PreScan虛擬仿真環境,通過超聲波傳感器獲取車位信息,對提出的基于預瞄模糊控制的自動泊車算法進行了仿真驗證。仿真結果表明:Sigmoid函數對兩段式泊車路徑的擬合決定系數可達0.99以上;采用該預瞄模糊控制泊車算法,汽車能很好地追蹤規劃的路徑,并成功泊入預定車位。
兩段式泊車;函數擬合;預瞄模糊控制;PreScan
隨著汽車數量的逐年攀升,城市停車場空間趨于飽和,經驗不足的駕駛員很難輕松地將汽車泊入擁擠的泊車位,因泊車造成的事故也屢見不鮮。自動泊車系統為解決泊車困難的問題提供了先進的技術手段。
目前,國內外主要采用兩種方法進行自動泊車控制算法的研究[1]:① 路徑規劃:借助傳感器獲取泊車空間幾何形狀與障礙位置,根據車輛運動學模型,預先規劃出一條理想的路徑,設計控制算法執行路徑跟蹤,實現自動泊車;② 利用經驗知識模擬駕駛員操作控制,如采用模糊邏輯、神經網絡算法等。但這些算法都過于復雜,不利于泊車實時性要求。Paromtchik等[2]利用回歸算法擬合正弦曲線得到理想路徑實現路徑規劃,但該算法需要很大的泊車空間。李紅等[3]采用多約束優化的方法擬合反正切曲線設計理想路徑,但該算法計算效率較低,不利于實際應用。ZHAO、CHANG等[4-5]應用泊車經驗知識設計模糊控制器來控制泊車過程,但該算法對汽車初始位置敏感,對泊車空間要求較大。吳冰等[6]采用粒子群方法、結合RBF神經網絡實現自動泊車路徑規劃,其仿真成功率高,但對初始位置要求較高,計算量大。
自動泊車系統的設計難度在于汽車能在盡可能小的空間內快速決策出泊入過程中的方向盤轉角,實現多種空間狀態下的自動泊入。考慮到工程適用性與算法魯棒性,本文采用路徑規劃的方法尋找理想路徑。以此為基礎,研究基于預瞄模糊控制的平行泊車控制算法,以實現汽車穩定追蹤理想路徑,降低泊入過程中的計算積分誤差,提高不同環境下的泊車成功率。
1 自動泊車路徑規劃算法
一個完整的自動泊車系統包括4個部分:環境感知、路徑規劃、路徑跟蹤、人機交互[7]。自動泊車工作流程如圖1所示。當駕駛員啟動自動泊車系統后,在車輛運動過程中,傳感器會自動探測周圍空間環境。當有適合尺寸的泊車空間時[7],人機交互系統會提示駕駛員找到車位,系統自動進行路徑規劃。若可以規劃出一條泊入路徑則提示駕駛員可以進行泊車,否則駕駛員只能放棄當前泊車位置。之后按照系統提示,駕駛員掛入倒擋,路徑跟蹤控制開始執行,最終完成泊車。
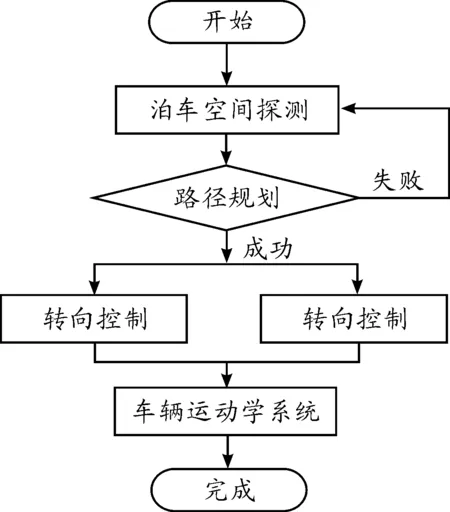
圖1 自動泊車工作流程
自動泊車系統的路徑規劃是根據車載超聲波傳感器探測到泊車需求方向上的車位空間信息,再利用這些信息規劃出一條理想的路徑。相比智能算法,路徑規劃可大大降低計算的復雜程度,并預先確定汽車能否在此泊車位完成自動泊車。
1.1 路徑規劃運動學模型
圖2為基于阿克曼轉向機構的車輛運動學模型[8]。 由于正常情況下泊車速度很低(約≤5 km/h),故后輪可視為無滑移,即后輪軌跡的y方向速度為0,根據圖2可知車輛后軸中心點坐標:
(1)
前后軸中心點坐標之間存在如下關系:
xr=xf-lcosθ
yr=yf-lsinθ
(2)
對式(2)進行求導得:
(3)
將式(3)代入式(1)得
(4)
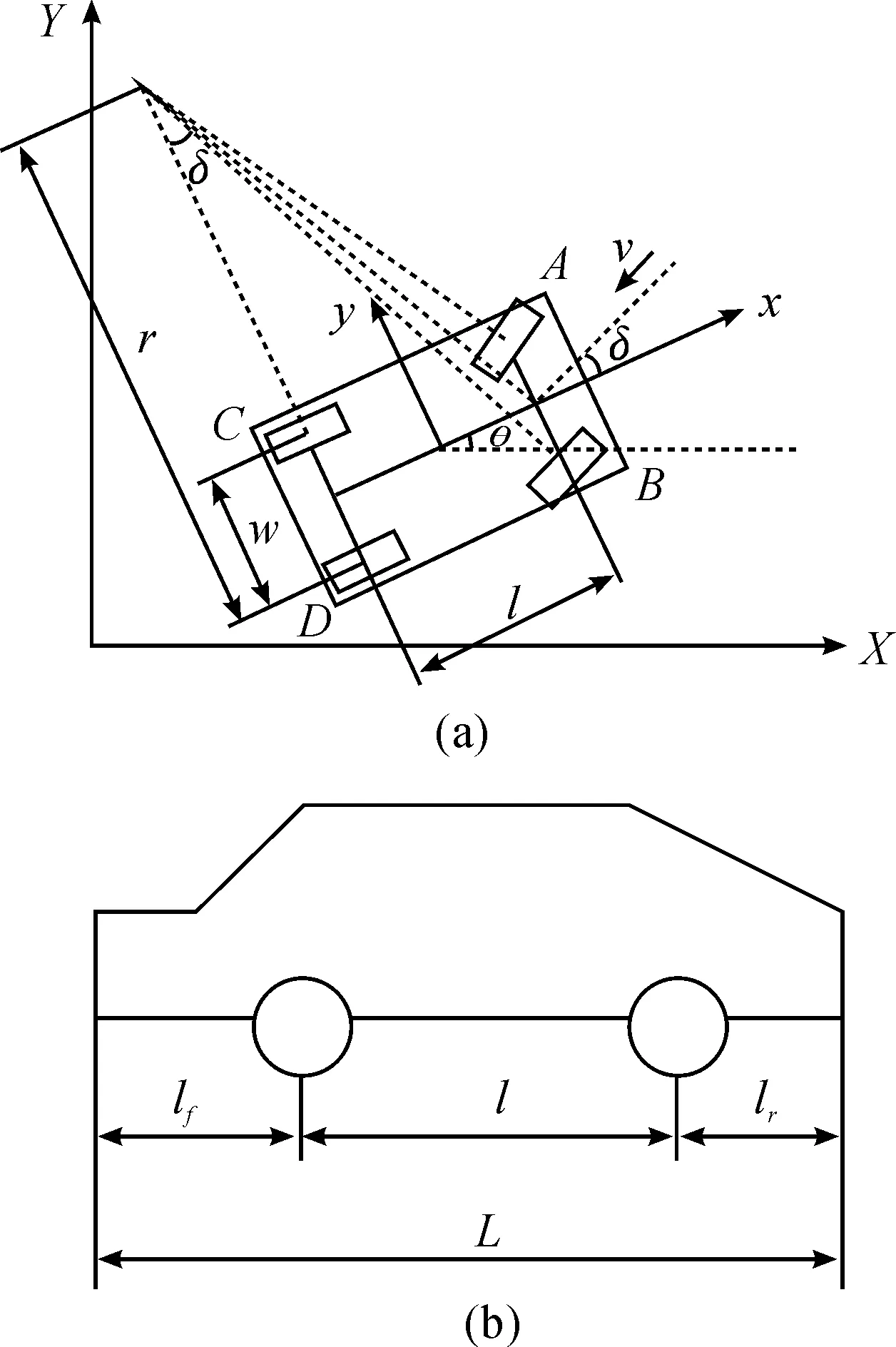
圖2 車輛運動學模型
設δ為阿克曼轉向機構中前軸中心點等效轉向角,則前軸中心點的速度為:
(5)
將式(5)代入式(4)得
(6)
再將式(5)與(6)代入式(3),可獲得后輪中心點速度:
(7)
將式(7)對時間積分,可推導出后輪中心點的運動軌跡:
(8)
左后輪的運動軌跡為:
(9)
右后輪的運動軌跡為:
(10)
其中:θ為汽車方位角;l為軸距;w為輪距。
由式(9)與(10)可以看出:當汽車低速泊車時,后輪的運動軌跡與車速無關,只與汽車的軸距、輪距與轉向輪轉角有關,并且運行軌跡是一段圓弧。上述軌跡規劃的運動學方程為兩段式泊車提供了理論依據。
1.2 兩段式泊車路徑擬合方法
依據汽車低速泊車后輪軌跡為圓弧的特點,根據泊車空間的尺寸大小確定兩段相切圓弧,汽車后輪可以沿著圓弧運動順利泊入車位,這就是兩段式泊車。通過控制汽車的最小轉彎半徑,兩段式泊車不僅能夠減少泊車空間,降低泊車換擋次數,還能使汽車平行泊入車庫內走過的路徑最短。兩段式泊車幾何路徑規劃如圖3所示。
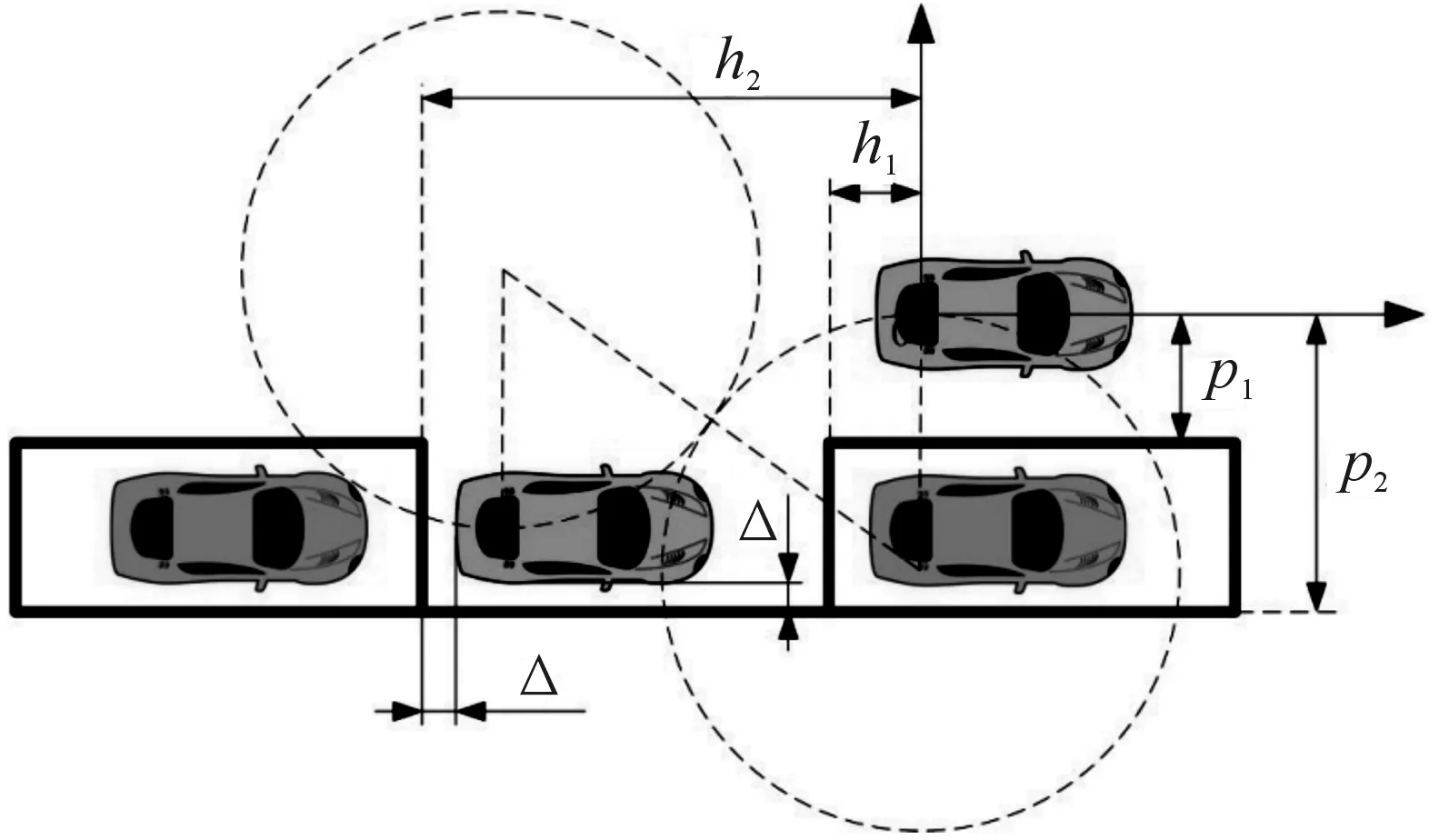
圖3 兩段式泊車幾何路徑規劃
根據阿克曼轉向原理,車輛運行過程中轉彎半徑與前輪轉角之間的關系為
(11)
其中αout為前外輪轉角。從圖3可知:汽車以最小轉彎半徑轉向,在兩段圓弧相切點處車輛方位角達到最大值,其值為
(12)
其中:Δ為安全緩沖距離;p2為側邊庫底距車軸對稱線的縱向距離;rmin為最小轉彎半徑;B為車寬。
(13)
此函數具有4個擬合參數,分別為a1,a2,a3,a4,其2階導數為
(14)
該擬合函數的2階導數連續,表明函數曲率連續變化,即車輛沿這條路徑運動時轉向角無突變。同時,-a2a3的取值可以保證該函數的曲率在x=0時趨近于0,即車輛在泊車起始位置處前輪轉向角為0。為驗證兩段式泊車路徑規劃函數擬合效果,設計3種仿真工況參數,如表1所示。表2是根據3種工況得到的擬合參數。路徑擬合結果見圖4。
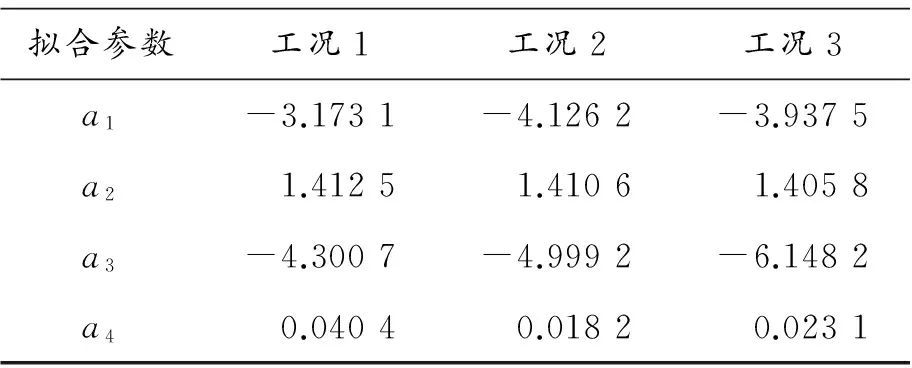
表2 函數擬合參數
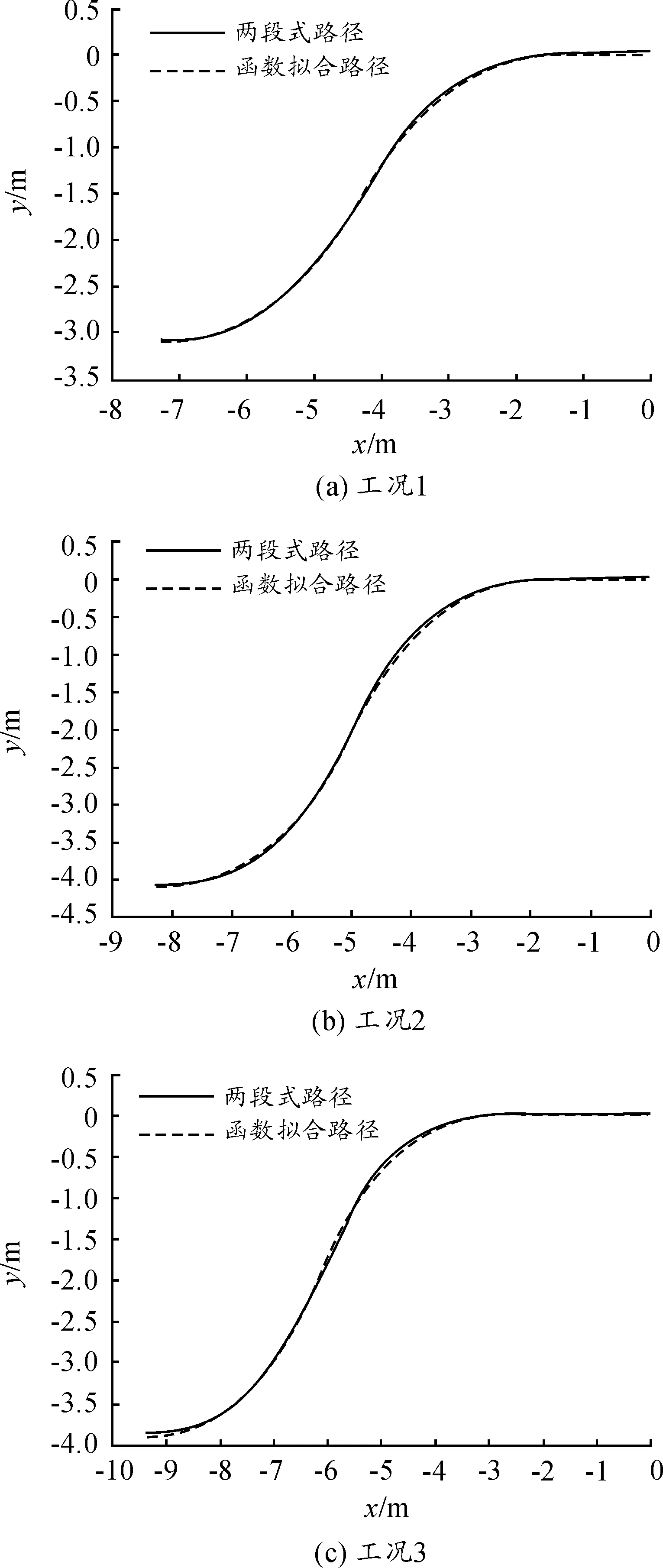
圖4 路徑擬合結果
為檢驗函數擬合優度,可用決定系數來定量評價,其計算公式為
(15)
由式(15)計算得到仿真試驗中3種工況下的擬合決定系數分別為0.999 7,0.999 4,0.999 5,說明采用4個擬合參數的Sigmoid函數擬合效果較好,對兩段式泊車路徑的近似程度較高。
2 路徑追蹤控制
路徑追蹤控制是無人駕駛智能汽車技術中的核心技術之一,目前常用的追蹤控制方法主要有PID算法、模糊推理、模糊PID、神經網絡或多種算法相結合的綜合控制[9]。無論采用何種控制方法,首先需要建立路徑追蹤誤差模型。
2.1 橫向預瞄模型
預瞄的引入,相當于建立駕駛員模型,實現路徑追蹤的閉環控制。斯坦福大學Stanley智能車研究所提出了距離-角度偏差預瞄模型[10];CLA提出了環形預瞄模型[11];北京理工大學采用了Follow the Carrot模型[12];Pure Persuit模型[13]設計了一條圓弧,車輛可沿這條圓弧到達目標點,由此圓弧計算車輛的前輪偏角控制量。以上模型主要用于智能汽車行駛過程中的路徑追蹤。自動泊車有別于智能汽車的行駛控制,其運動速度低、運動空間小,且速度方向為負,采用以上預瞄模型難以快速準確地實現誤差計算。本文在距離-角度偏差預瞄模型基礎上提出橫向預瞄模型[14],如圖5所示。
當車輛探測到可行的泊車空間時停止,進行路徑規劃,以當前車輛停止的位置與方位角建立大地坐標系,如圖5所示。圖5中的坐標系一旦確定,整個自動泊車過程都將在此坐標系下完成。車輛運動前方一定距離的預瞄點K與相應橫向位置K′的偏差Δy稱之為橫向距離誤差,預瞄點的方位角θ與相應橫向位置K′方位角的偏差Δφ稱之為橫向角度誤差,橫向距離誤差與橫向角度誤差統稱為橫向預瞄誤差。在實際計算過程中,設定一定權值來分配距離誤差和角度誤差的影響權重,其關系式為:
(16)
其中:Xr為后軸中心x坐標;Yr為后軸中心y坐標;XK為預瞄點x坐標;P為預瞄距離;Y(X)為擬合曲線函數表達式;i為權重分配系數,考慮到泊車過程中位置誤差與角度誤差對追蹤都具有直接影響,因此取權重分配系數i=0.5。
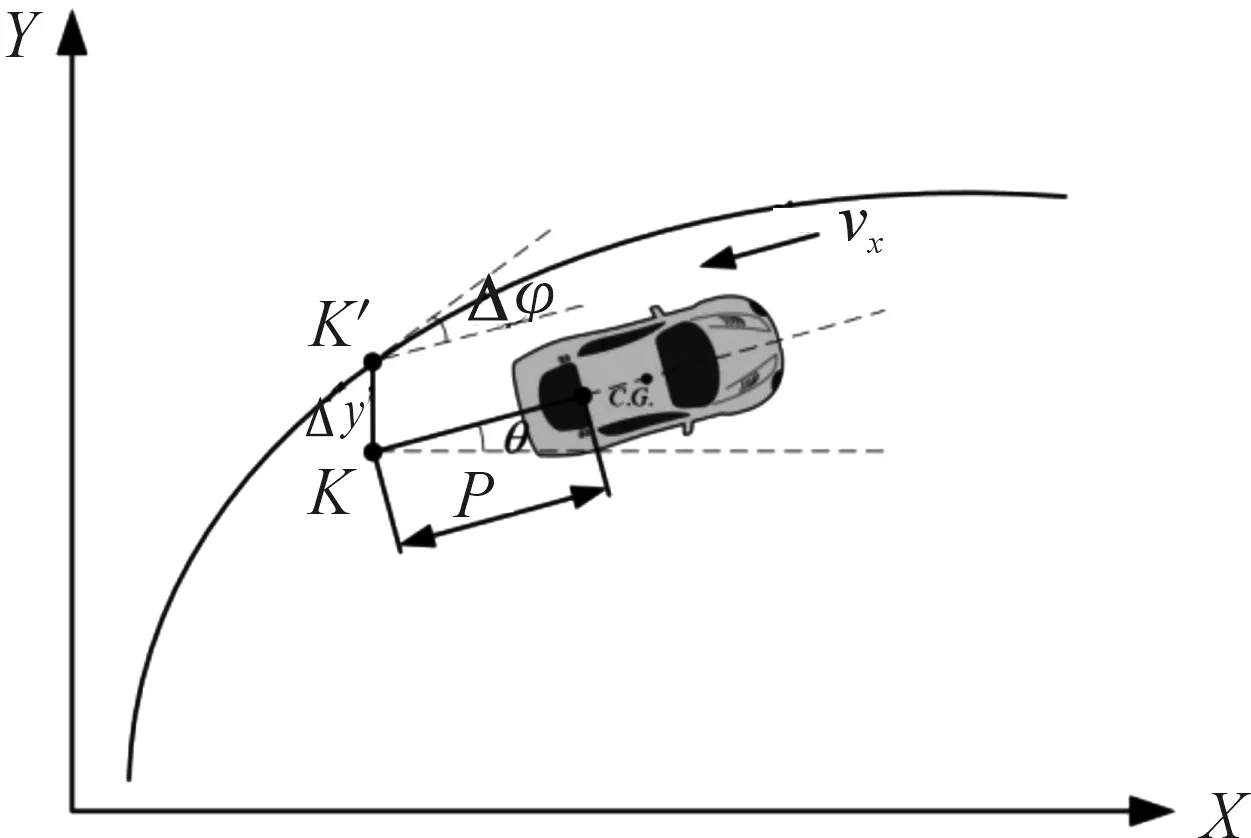
圖5 橫向預瞄模型
2.2 路徑追蹤模糊控制
汽車運動學系統具有強非線性與耦合性,采用模糊控制既可實現路徑規劃與路徑追蹤的實時性、魯棒性,又能發揮經驗知識對泊車精度提升的優勢。本文以橫向預瞄誤差與誤差變化率為模糊控制輸入、轉向外輪轉角為模糊控制輸出設計模糊控制器,其控制系統如圖6所示。
分別劃分7個誤差輸入、誤差變化率輸入與轉角輸出的模糊集合,模糊量化后論域均為[-1,1],其隸屬度函數如圖7所示。
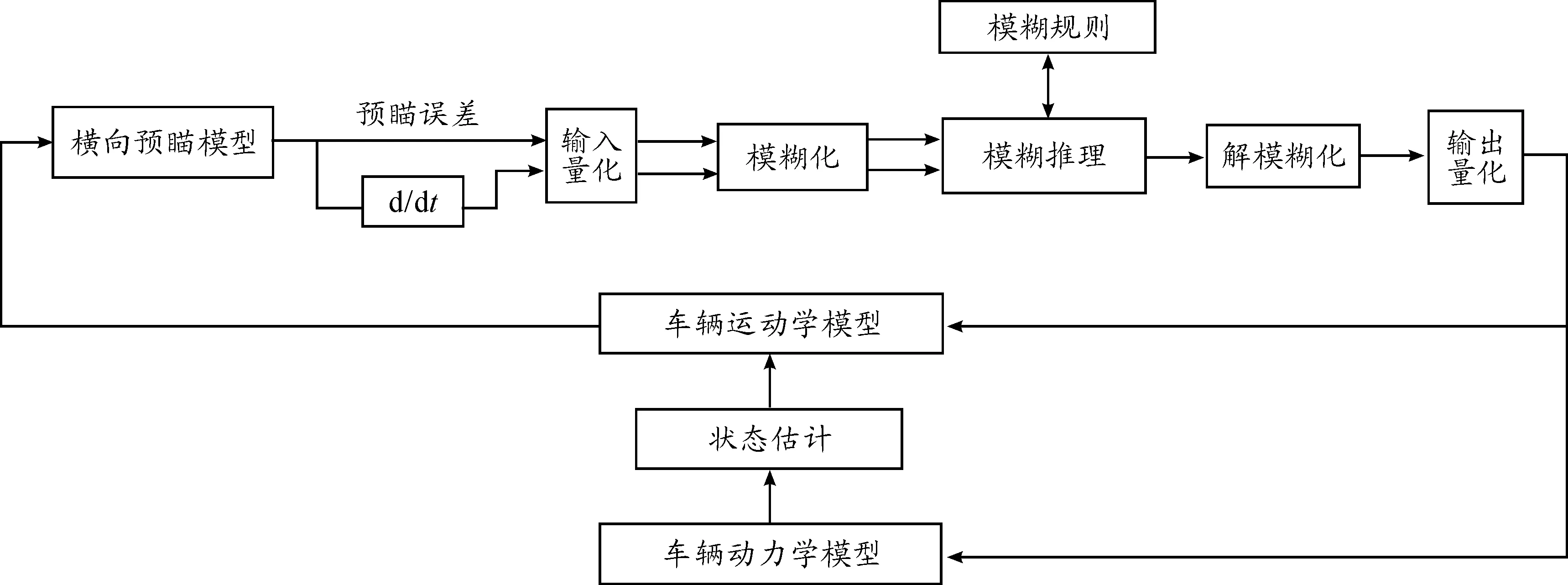
圖6 預瞄閉環控制系統
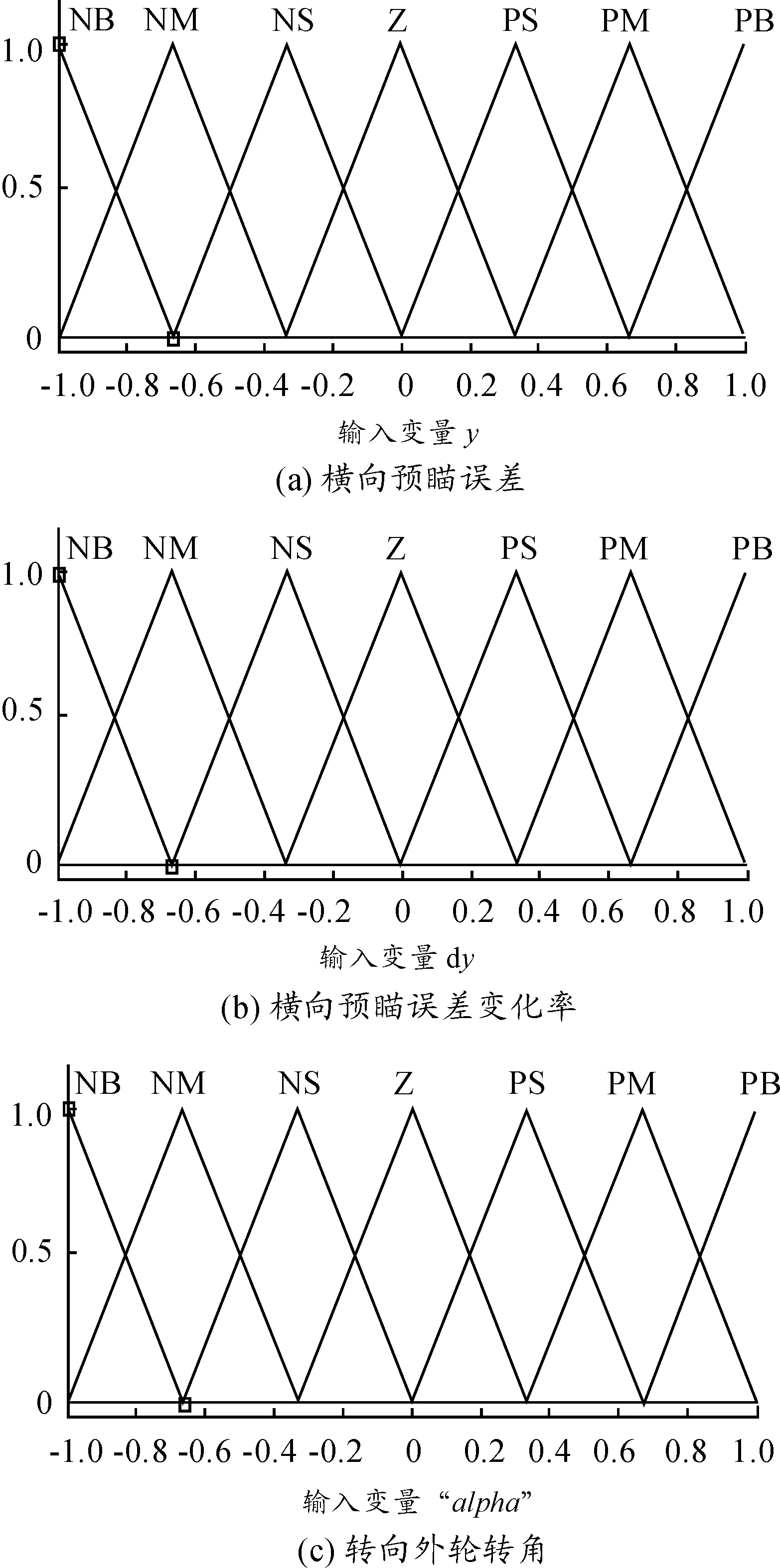
圖7 隸屬度函數
圖7中,NB,NM,NS,Z,PS,PM,PB分別代表“負大”、“負中”、“負小”、“零”、“正小”、“正中”、“正大”,模糊規則采用ifEandECthenU,共產生49條規則,如表3所示。由規則生成的模糊控制面如圖8所示。
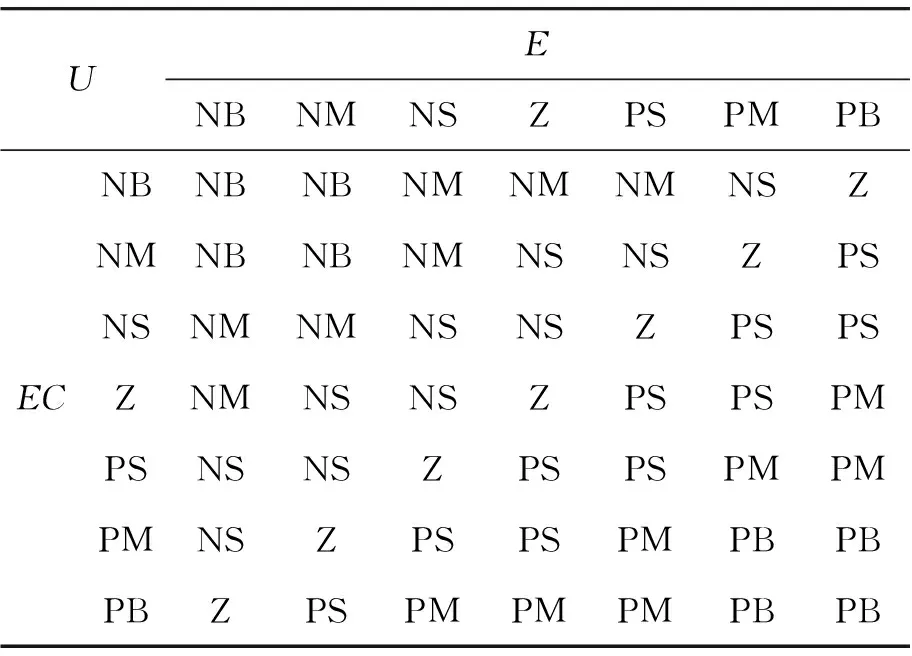
表3 模糊規則
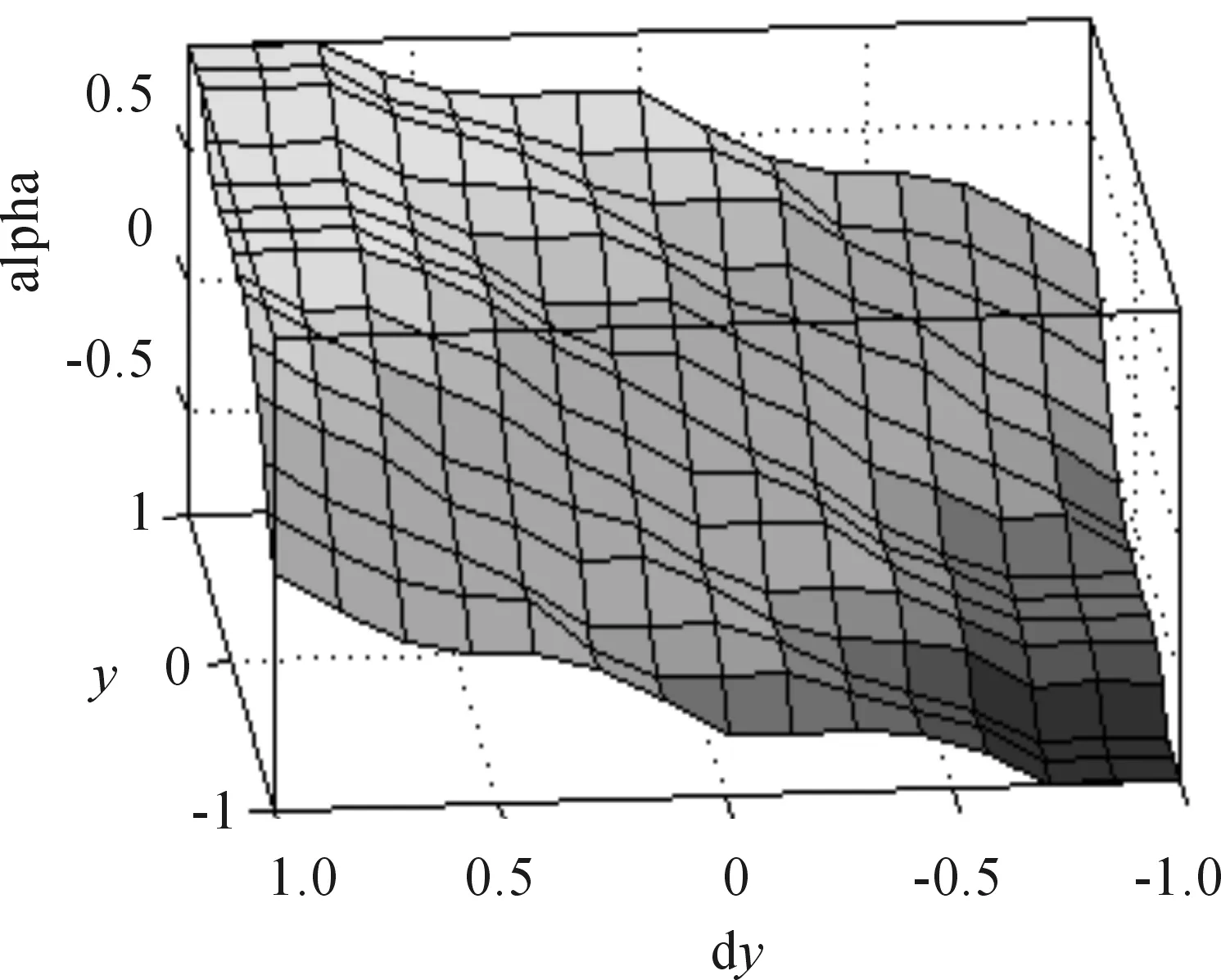
圖8 模糊控制面
3 測試場景設計與仿真
某乘用車的外形參數如表4所示。
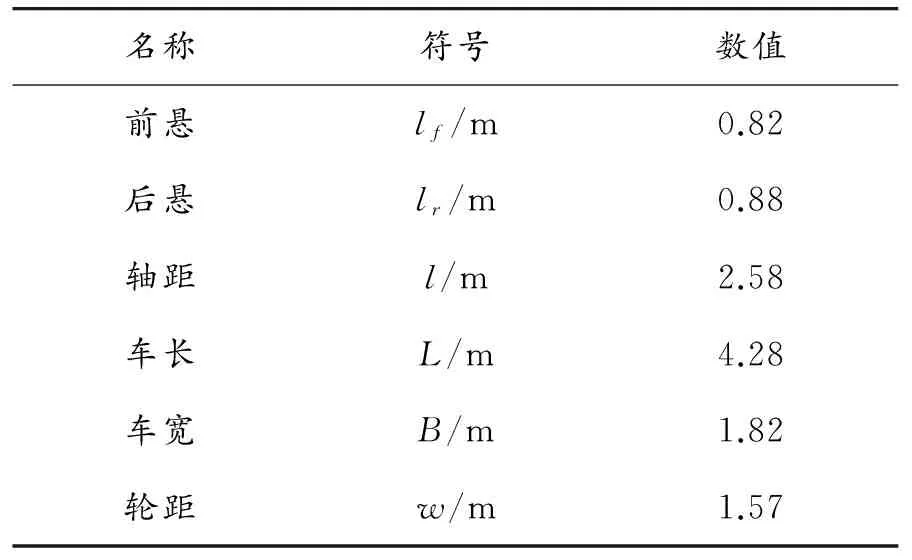
表4 某乘用車外形參數Table 4 Shape parameters of a passenger car
3.1 基于Matlab的仿真驗證
針對以上的兩段式泊車路徑規劃以及基于橫向預瞄的模糊控制路徑追蹤控制方法,采用Matlab/Simulink,構建控制系統仿真框圖,對本文提出的自動泊車控制方法進行驗證。圖9是3種工況下的仿真結果。
從圖9可知:預瞄模糊控制能有效控制車輛沿著理想軌跡運動,其誤差在可接受范圍內,并且方向盤轉角也在初始位置由0逐漸增大,變化過程中并無突變,滿足泊車要求。車輛泊入車庫后,相對車庫位置比較靠后,還需要前進一段距離駛到車庫中間位置。仿真結果表明:基于預瞄模糊控制的平行泊車算法計算實時性好、魯棒性強,具有較高的工程實用價值。
3.2 基于PreScan的仿真驗證
PreScan是專業的主動安全設計與環境、傳感器建模仿真軟件,可以很大程度上還原真實場景,提高仿真的準確度與真實性。本文以PreScan場景為基礎,結合軟件中的超聲波傳感器,建立自動泊車仿真環境,實時驗證控制算法的正確性。圖10是構建的PreScan場景,圖11是工況2的泊車過程實時仿真結果。
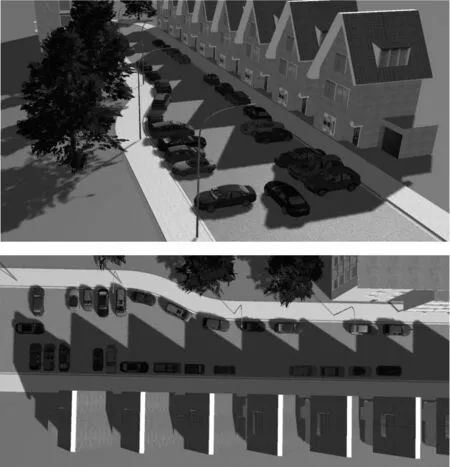
圖10 PreScan場景

圖11 PreScan VisViewer與GUI仿真過程
工況2的自動泊車過程可分為5個階段:(a) 汽車低速前進,啟動自動泊車程序,超聲波傳感器啟動,開始搜索車位;(b) 發現車位,減速停車,根據超聲波傳感器獲取的泊車環境信息重構空間坐標,規劃兩段式泊車路徑并擬合,完成后掛入倒擋開始泊車;(c) 預瞄模糊控制算法實時計算汽車前輪轉角,利用轉向比計算方向盤轉角,實現轉向控制;(d) 順利泊入車位,為使車輛停在車庫中間,還需要前進修正一次;(e) 前進修正完成泊車;(f) GUI仿真過程展示了超聲波傳感器獲取的環境信息,其中虛線是車輛運動軌跡,實線是障礙輪廓。
4 結束語
本文針對目前自動泊車系統轉向不連續問題,提出了基于兩段式泊車的路徑規劃方法,建立了橫向預瞄模型,采用模糊控制方法對理想路徑進行了追蹤控制,并通過仿真驗證了控制算法的有效性。
采用兩段式泊車,設計了一條路程最短的路徑,利用Sigmoid函數,對兩段式泊車路徑進行了參數擬合。結果表明:其擬合決定系數達到0.99以上,函數曲線滿足泊車過程中曲率要求。
研究了基于預瞄模糊控制的閉環控制平行泊車算法,通過控制汽車轉向外輪轉角,實現了對理想路徑的追蹤控制,其計算精度能滿足要求,在不同的車庫尺寸及初始位置條件下,均能順利泊入車庫;基于PreScan搭建了自動泊車的場景模型,聯合Matlab/Simulink控制仿真,驗證了自動泊車控制算法的有效性和正確性,通過真實泊車場景的構建,直觀再現了控制算法的效果。
[1] 郭孔輝,姜輝,張建偉,等.基于模糊邏輯的自動平行泊車轉向控制器[J].吉林大學學報(工學版),2009,39 (S2):236-240.
GUO Konghui,JIANG hui,ZHANG Jianwei,et al.Automatic parallel parking steering controller based on fuzzy logic control theory[J].Journal of Jilin University(Engineering and Technology Edition),2009,39 (S2):236-240.
[2] PAROMTCHIK I E,LAUGIER C.Autonomous Parallel Parking and Returning to Traffic Maneuvers[C]//Proceedings of the 1997 IEEE/RSJ International Conference on Intelligent Robot and Systems.Grenoble,France:[s.n.],1997:21-23.
[3] 李紅,郭孔輝,宋曉琳,等.基于Matlab的多約束自動平行泊車軌跡規劃[J].中南大學學報(自然科學版), 2013,44(1):101-107.
LI Hong,GUO Konghui,SONG Xiaolin,et al.Trajectory planning of automatic parallel parking with multi-constraints based on Matlab[J].Journal of Central South University(Science and Technology),2013,44 (1):101-107.
[4] ZHAO Y N,COLLINS E G.Robust automatic parallel parking in tightspaces via fuzzy logic[J].Robotics and Autonomous Systems,2005,51 (5):111-127.
[5] CHANG S J,LI J.Design and implementation of fuzzy parallel parking control for a car-type mobile robot[J].Journal of Intelligent & Robotic System,2004,34(2):175-180.
[6] 吳冰,錢立軍,虞明,等.基于RBF神經網絡的自動泊車路徑規劃[J].合肥工業大學學報(自然科學版),2014,35 (4):459-540.
WU Bing,QIAN Lijun,YU Ming,et al.Path planning of automatic parallel parking based don RBF neural network[J].Journal of Hefei University of Technology(Natural Science),2014,35 (4):459-540.
[7] POHL J,SETHSSON M,DEGERMAN P,et al.A semi-automated parallel parking system forpassenger cars[J].J Automobile Engineering,2006,220:53-65.
[8] COLYER R E,ECONOMOU J T.Comparison of steering geometries for multi-wheeled vehicles by modelling and simulation[C]// Proceedings of the 37th IEEE Conference on Decision and Control.USA:IEEE,1998:3131-3133.
[9] 喬維高,徐學.無人駕駛汽車的發展現狀及方向[J].上海汽車,2007(7):40-44.
QIAO Weigao,XU Xue.Development status and direction of driverless cars[J].Shanghai automobile,2007(7):40-44.
[10]SEBASTIAN T,MIKE M,HENDRIK D,et al.Stanley The Robot that Won the DARPA Grand Challenge[J].Journal of Field Robotics,2006,23(9):661-692.
[11]CHEN Q,OZUGUNER U,REDILL K.Ohio State University at the 2004 DARPA Grand Challenge:Developing a Completely Autonomous Vehicle[J].IEEE Intelligent.Systems,2004,19(5):8-11.
[12]CEM H,OZGUNER U,KEITH A.Redmill.Automated Lane Change Controller Design[J].IEEE Transactions on Intelligent Transportation System,2003,4(1):13-22.
[13]KRISTIJIAN M,ROLAND P,ROLAND S.Path Following for Autonomous Vehicle Navigation with Inherent Safety and Dynamic Margin[C]//IEEE Intelligent Vehicles Symposium[C].USA:IEEE,2008:108-113.
[14]趙玲.平行泊車方法研究與仿真[D].西安:長安大學,2009.
ZHAO Ling.Research and Simulation of parallel parking method[D].Xi’an:Chang’an University,2009.
(責任編輯 劉 舸)
Research on the Auto Parking Algorithm Based on the Preview Fuzzy Control
XIONG Zhou-bing1, YANG Wei2, DING Ke1, LIANG Feng-hua1, ZHENG Ling2, LI Yu-sheng1
(1.Chang’an Auto Global R&D Center, Chang’an Automobile Co., Ltd., Chongqing 401120, China; 2.The State Key Laboratory of Mechanical Transmissions, Chongqing University, Chongqing 400044, China)
The Sigmoid function was adopted to fit the two section of parking path planning, with the aim to solve the discontinuous problems of automatic parking system. The lateral preview model was established and the path tracking error was estimated. Then the preview fuzzy control algorithm was adopted to track the ideal path. Finally, PreScan virtual simulation environment was established and the information of the parking slots was obtained by ultrasonic sensors.Simulation results demonstrate that the fit coefficient of determination can be over 0.99 between the Sigmoid function and the two-section parking path. Based on the preview fuzzy control, the car can track the planning path successfully and park into parking spaces.
two-section parking; function fitting; preview fuzzy control; PreScan
2016-11-28 基金項目:重慶市自然科學基金重點資助項目(cstc2015jcyjBX0097);重慶市重點產業共性關鍵技術創新專項項目(cstc2015zdcy-ztzx30001)
熊周兵, 男,博士,主要從事車輛工程研究;通訊作者:鄭玲,女,教授,博士生導師,主要從事汽車系統動力學與控制、智能材料與結構系統、振動與噪聲控制等方面研究,E-mail:zling@cqu.edu.cn。
熊周兵,楊威,丁可,等.基于預瞄模糊控制的自動泊車算法研究[J].重慶理工大學學報(自然科學),2017(2):14-22.
format:XIONG Zhou-bing, YANG Wei, DING Ke,et al.Research on the Auto Parking Algorithm Based on the Preview Fuzzy Control[J].Journal of Chongqing University of Technology(Natural Science),2017(2):14-22.
10.3969/j.issn.1674-8425(z).2017.02.003
U491.7
A
1674-8425(2017)02-0014-09
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
領導決策信息(2018年50期)2018-02-22 06:17:16
兒童時代·快樂苗苗(2017年7期)2018-01-24 18:28:45
商周刊(2017年5期)2017-08-22 03:35:26
中國衛生(2016年2期)2016-11-12 13:22:16
光學精密工程(2016年6期)2016-11-07 09:07:19
作文大王·低年級(2016年4期)2016-04-18 00:24:37
中國工程咨詢(2016年4期)2016-02-14 07:28:28
