2017年路虎發現5新技術剖析(五)
2017-03-17 02:24:50遼寧陳東波
汽車維修技師 2017年10期
遼寧/陳東波
四、電氣系統
(一)通信通道
為了讓All-New Discovery 與其他Land Rover 產品保持一致,已修改了車輛的通信網絡。中速和高速CAN 被替換為高速CAN 網絡結構。作為首次引入Land Rover 產品的功能,此網絡結構還配備了超高速Flex Ray 通信通道。
網絡按如下劃分:
◆車身HS CAN:所有模塊均采用了高速版本以提高帶寬,從而為全新的車身功能提供支持
◆底盤HS CAN:包含了提供底盤/車輛動力以及駕駛員輔助系統和安全功能的所有模塊
◆舒適HS CAN:為舒適度和控制、信息娛樂以及駕駛員信息功能提供支持的主通信功能
◆電源模式0 HS:這是一套電源管理網絡,可在車輛鑰匙處于關閉位置時為需要通信的車輛交互功能提供支持(電源模式0 通信)
◆動力傳動系統HS CAN:支持通過先前的網絡架構設計為無法遷移到Flex Ray 網絡的模塊提供通信
◆Flex Ray:全新的總線布局,動力傳動系統已從先前的PT-CAN 網絡進行遷移,以便提高通信能力
1.網關模塊

1.CAN 總線連接 2.BCM/GWM 3.以太網連接 4.CAN總線(電源模式0) 5.診斷插座
56 信號傳輸
網絡架構還將網關模塊(如圖55所示)和車身控制模塊整合到了一個模塊中。診斷插座仍然直接連接到網關模塊,但連接技術得到了增強。現在安裝了使用以太網連接將診斷設備連接到車輛的裝置,而不是通過CAN總線連接將診斷設備連接到車輛。
2.CAN總線
在了解Flex Ray 概念之前,我們首先來回顧下高速CAN總線網絡的工作方式。CAN 總線提供了一個通信網絡,允許電子控制模塊交換數據。CAN總線網絡被分類為多主網絡,即連接到網絡的所有模塊均具有同等的權限來傳輸消息。除了可傳輸周期性(定期傳輸)消息外,總線還允許實施事件驅動的通信策略,因此,每個模塊必須能夠隨時訪問總線。總線在任意指定時間只可傳輸一條消息,因此,為了讓網絡正常運轉,將使用一組規則(仲裁)來將數據或消息傳輸到網絡中,所有模塊必須遵守這些規則以準確發送和接收消息,如圖56所示。
(1)CAN 消息結構(如圖57所示)
使用定義的字段結構來傳輸數字化消息:

圖55 網關模塊
①開始字段——指明新消息的開端
②標識符字段——消息信息/內容和優先級
③控制字段——消息中包含的數據量
④數據字段——數據或消息
⑤循環冗余檢查(CRC)字段——一個計算值,用于驗證是否已接收正確的數據量

圖57 消息結構圖
⑥確認字段——由任意接收模塊填寫,以向發送方表明是否已成功投遞消息
⑦時間范圍結束——表明現在可以發送下一條消息
消息結構包含檢查字段,但只有在發送消息后才可以檢測到傳輸故障,因此網絡必須處于活動狀態才能確定傳輸問題是否存在。仲裁描述了消息的發送順序,模塊必須耐心等待自己的消息獲得最高優先級,然后它們才可擁有用于傳輸數據的總線的獨家訪問權限。盡管該系統在過往早已被證實無比可靠,但CAN 總線網絡并未被分類為容錯網絡,不保證可以在特定時間范圍內投遞消息或傳輸的數據不會發生損壞。包含損壞數據的傳輸實際上會拖慢總線活動,因為必須重復傳輸過程。
(2)CAN總線總結
◆CAN總線采用了多主原則
◆通信通道允許傳輸周期性消息和由事件驅動的消息
◆在任意時刻,僅可通過總線傳輸一條消息
◆使用了仲裁協議來管理任意消息的傳輸
◆使用了一系列定義的字段來結構化每條消息
◆通信通道并不具備容錯特性
◆不保證可以在特定時間范圍內傳輸消息
◆損壞的數據可能會影響總線的運行速度
3.Fle xRay
All-New Discovery 的通信網絡是首款采用Flex Ray 通信協議的Land Rover 產品,如圖58所示。Flex Ray 是一套串行通信系統,適合在管理安全關鍵型車輛系統的模塊之間交換數據。它提供了可容錯的實時通信通道,其工作速度高達10Mbit/s。總線架構由一對扭結電線(正極總線和負極總線)構成,電路使用了端接電阻器。其數據傳輸方法與CAN 總線類似,其中,通過同時改變兩根電線上的電壓來制造電壓差,從而創建數字邏輯“1”或“0”。Flex Ray傳輸還需遵循一組規則,這些規則定義了Flex Ray 協議,以及用于實現高速數據傳輸的方法。Flex Ray 拓撲主要被排列成“星形”配置。所有模塊均包含一個通往中央BCM/GWM 模塊的專用分支。此配置的優勢是,如果一條分支故障,且與一個模塊之間失去通信,則其他模塊可以繼續進行相互通信。注意: 車輛配備分動箱控制模塊(TCCM)時,可修改配置。
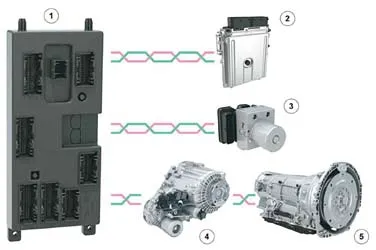
圖58 通信模塊連接
Flex Ray總結
◆Flex Ray 的工作速度高達10Mbit/s◆總線由一對扭結電線構成
◆使用電壓差來傳輸數據
◆使用Flex Ray 協議來管理數據傳輸
◆星形配置提供了強大的網絡結構
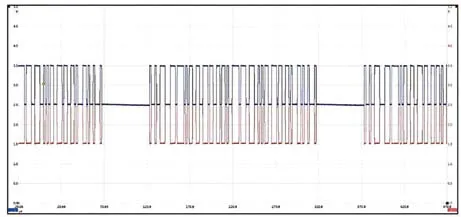
4. Flex Ray傳輸協議(如圖59所示)Flex Ray使用了時分多址(TDMA)法,而非多主概念。不允許模塊按照隨機或基于事件的順序訪問通信總線,它們僅可按照精確定義的、時長相等的時隙計劃傳輸數據。
每個通信周期包含以下字段:
◆靜態分段——劃分為同等時長的時隙以傳輸靜態數據
◆動態分段——劃分為同等時長的時隙以傳輸基于事件的數據
◆符號窗口——可用于網絡維護
◆網絡閑置時間——用于同步所有網絡模塊
為了流暢傳輸或接收數據,所有Flex Ray 模塊必須同步到相同的時鐘。將傳輸起始時間范圍,以便為所有模塊建立時鐘時間。在通信周期內,網絡閑置時間將使模塊有機會重新同步/調整它們各自的時間基礎設置。由于時間將在整個網絡操作期間保持一致,Flex Ray能夠確保投遞到該網絡上的模塊的數據一致性。因此,作為此特性帶來的優勢,所有Flex Ray 模塊可以接收到最新或接近實時的傳輸數據。
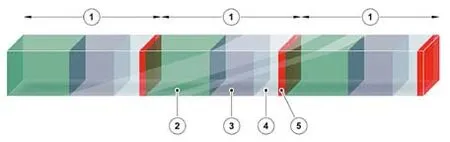
圖59 FLex Ray傳輸

A.通信周期1 B.通信周期2 1.時隙1(BCM/GWM) 2.時隙2(PCM) 3.時隙3(ABS) 4.時隙4(TCM)
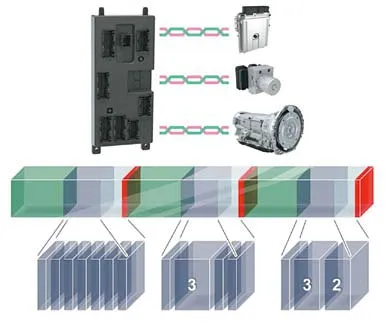
圖61 動態分段
(1)傳輸總結
◆Flex Ray 不使用多主概念
◆模塊根據基于時間的計劃傳輸數據
◆所有Flex Ray 模塊同步到相同的時鐘時間
◆Flex Ray 模塊可接收到最新的傳輸數據
(2)靜態分段(如圖60所示)
網絡設計者將確定所有Flex Ray 模塊的通信順序。確定順序后,每個模塊將被分配一個特定的時隙。模塊在通信周期內等待其特定的時隙來臨,然后可以獲得用于傳輸數據的總線的獨家訪問權限。如果模塊離線或未準備好傳輸數據,則分配的時隙將保持空白。該模塊必須等到下一個通信周期才能傳輸數據。使用TDMA 法時,通過靜態分段來傳輸周期性數據。此數據是既定的系統的動態變量的值并非隨機,它們將始終按照可預測的方式對指定時刻施加在該系統上的力做出反應。使用車輪轉速作為變量示例。無論是靜止還是移動,車輛將始終具備車輪轉速(既定)。將使用車輪轉速值來影響其他大量車輛系統,因此會把此信息反復傳輸到總線上。將定期傳輸消息“車速為x km/h”,因為只有變量“x”或實際車速會發生改變。使用TDMA 法后,便無須進行消息仲裁,現在將在可預測的時間范圍內傳輸數據。該示例顯示了4個時隙,在現實中,每個通信周期可能包含數十個時隙,通信通道可以在每個通信周期傳輸大量數據。
(3)靜態分段總結
◆Flex Ray模塊按照網絡設計的順序/計劃傳輸數據
◆每個模塊使用特定的時隙傳輸數據
◆每個時隙允許模塊獲得總線的獨家訪問權限
◆靜態時隙允許傳輸既定數據
◆每個通信周期可以傳輸來自所有已連接模塊的靜態數據
(4)動態分段(如圖61所示)
TDMA 功能足以完成靜態消息傳輸,但幾乎無法支持由事件驅動的消息傳輸(動態消息傳輸)。為實現此功能,Flex Ray 提供了相應選項,以通過動態分段擴展每個通信周期。動態消息示例已踩下制動踏板。動態分段具有固定的時長,分為一系列細微時隙。這些細微時隙按優先級順序排列,最接近時間范圍起始點的細微時隙負責傳輸最高優先級的消息。固定分段長度可確保靜態數據傳輸不會發生延遲。由于不可預測事件驅動的數據(非既定),將對消息傳輸協議進行修改。傳輸將遵循基于時間的靈活多重訪問協議。盡管消息必須在特定細微時隙中傳輸,消息仲裁(與CAN總線類似)將決定哪個模塊可以使用可用的分段時間。到達某個細微時隙時,模塊可以在短時間內傳輸任意動態數據。如果模塊沒有傳輸數據,它將失去該時隙,系統將繼續前進至接下來的時隙。將重復此過程,直到模塊傳輸動態數據。在傳輸期間,接下來的細微時隙必須等待傳輸完成。如果時間范圍到期,則具有較低優先級的消息必須等待下一通信周期開始。注意: 每個時隙(靜態或動態)均使用一系列字段(創建方式與單條CAN 總線消息類似)創建。
(5)動態分段總結
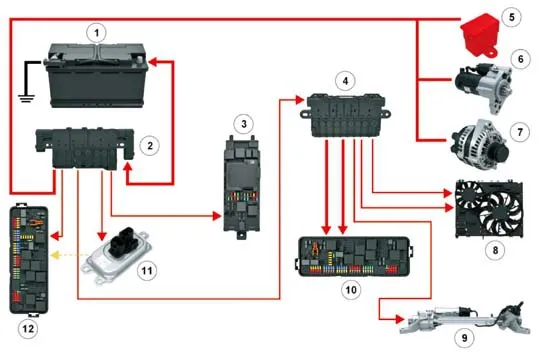
圖62 蓄電池能源網絡
◆事件驅動的數據指的是動態數據
◆動態數據是非既定的
◆動態分段允許傳輸動態數據
◆消息將遵循仲裁協議(基于時間的靈活多重訪問協議)
◆通信周期是靜態和動態分段的組合
(6)通信通道總結
①CAN總線
◆使用多主概念,所有模塊具有相同的總線訪問權限
◆在任意時刻僅可通過總線傳輸一條消息
◆消息需要經過仲裁以決定消息傳輸順序
◆周期性消息和事件驅動的消息遵循相同的仲裁方法
◆無法保證數據的投遞時間范圍
②Flex Ray
◆使用TDMA協議,所有模塊均根據計劃獲取總線的獨家訪問權限
◆靜態消息無須經過仲裁
◆在每個通信周期傳輸多條消息
◆保證消息的投遞時間范圍
◆通信周期包含靜態數據和劃分了優先級的動態數據
◆所有模塊均可傳輸和接收最新/實時的數據
(二)蓄電池能源網絡(如圖62所示)
1.永久蓄電池電源按照如下方式在車輛中進行分配
從蓄電池到蓄電池接線盒(BJB):接線盒這一部件包含了一些可將多個電路連接到主電源的接線。從蓄電池獲取電源,然后分為多股獨立的高電流消耗輸出。所有“接線”均使用大型保險絲連接到主電源。因此,在發生短路時,每個輸出都可以獲得單獨的保護。注意:BJB 位于右后側圍板飾件的下方。
(待續)
