烏江渡水電站激光準直變形監測資料分析
2017-03-20 06:34:32文富勇劉劍鳴
水力發電 2017年11期
文富勇,劉劍鳴,楊 弘
(1.水能資源利用關鍵技術湖南省重點實驗室,湖南長沙410014;2.中國電建集團中南勘測設計研究院有限公司,湖南長沙410014)
1 工程概況
烏江渡水電站大壩為混凝土拱形重力壩,壩頂高程765.00 m,最大壩高165.00 m,壩頂弧長394.6 m,設計正常蓄水位760.00 m,死水位720.00 m。大壩最大底寬119.50 m, 708.00 m高程以下的壩體橫縫通過接縫灌漿形成拱形整體,上部高57 m的壩體為單塊穩定的重力壩,自右向左共分為17個壩塊,最大壩塊寬23 m。河中④~壩段壩軸線半徑為500 m,中心角26°36′的圓弧;右岸①~③壩段圓弧半徑為80 m,左岸~壩段為直線等寬壩段。
拱壩水平位移監測通常采用“垂線法+導線法”和“垂線法+視準線法”,然而這種觀測方法不僅觀測精度低,適應性差,無法實現全自動化觀測。烏江渡水電站為混凝土拱形重力壩,采用“垂線法+視準線法”進行水平位移監測,視準線從④~壩段每個壩段設1個測點,在④、⑧和壩段各布置一組正、倒垂線。由于視準線工作基點布置在兩岸壩肩靠上游側,穩定性相對較差,且視準線長度超過了規范要求的300 m,測點除拱冠梁處外,其余測點均不能監測徑向變形,綜上考慮到視準線的缺陷以及人工觀測的不便,取消壩頂視準線,改為在靠近壩頂的廊道內安裝一套激光準直拱壩變形監測系統,其水平位移工作基點設在左、右岸灌漿廊道內,并利用④、⑧和壩段的垂線組進行校驗,構成串聯式“激光準直+垂線”的拱壩變形監測系統,實現拱壩壩體變形的全自動化觀測。

圖1 激光準直變形監測布置平面

圖2 激光準直高差銜接布置剖面(單位:尺寸mm;高程m)
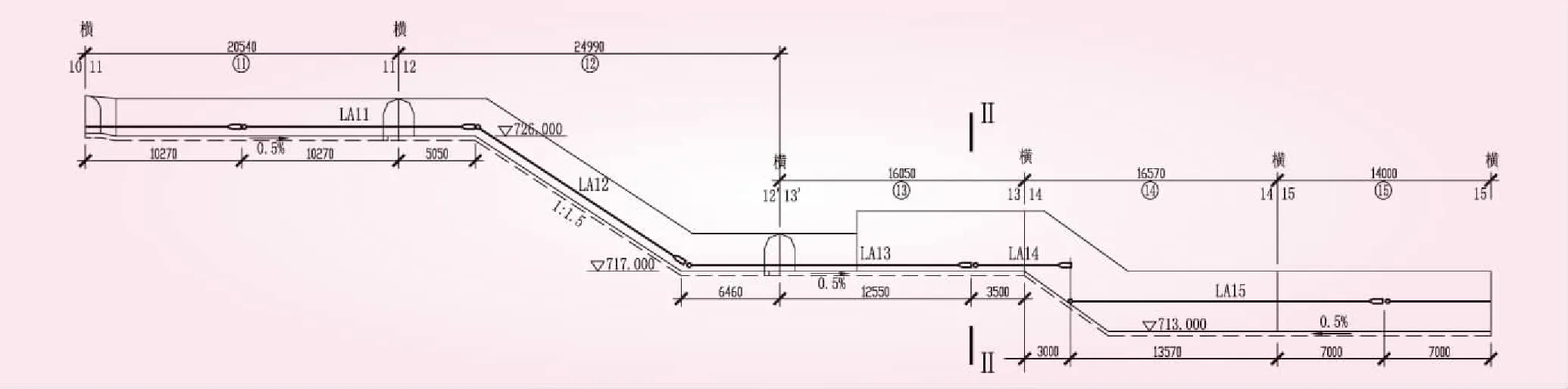
圖3 激光準直豎折連續傳遞布置剖面(單位:尺寸mm;高程m)
2 激光準直系統布置
激光準直拱壩變形監測系統布置從右岸737.50 m高程的灌漿隧洞至左岸713.00 m高程的灌漿隧洞,共布置了17個單元的激光準直裝置,如圖1所示。采用首尾相接、高差過渡銜接、豎折連續傳遞的形式,全長約361 m,其中在④壩段通過設置高層傳遞儀和新增垂線點將738 m高程廊道和713 m高程廊道內的激光準直線路銜接,形成垂直位移和水平位移的高差銜接傳遞,見圖2;在壩段和壩段間采用豎向折線傳遞形式完成兩個樓梯壩段激光準直線路銜接,見圖3。
激光準直變形監測系統僅能進行徑向水平位移和垂直位移監測,無法實現切向水平位移監測,為了實現切向水平位移監測,在每一單元的激光準直段各增設一套專門用于監測切向水平位移的銦鋼桿式位移計。水平位移以布置在左、右岸灌漿隧洞內的激光準直單元的左、右端點為工作基準點,實現雙基準閉合監測和誤差修正,同時與④、⑧、壩段的垂線系統監測值進行對比驗證,提高系統的可靠性和觀測精度。垂直位移以左、右岸灌漿隧洞內增設的雙金屬標的方法建立雙水準工作基點,形成雙基準附合水準測量,以提高測量精度或進行誤差修正[5]。
烏江渡水電站激光準直系統通過“分段接力”方式實現拱壩全壩段變形監測[2],盡管從理論上推算“分段接力”的方式是可行,但能不能反映大壩的實際變形情況還需通過監測數據進行具體分析[3]。本文通過對激光準直系統在真空條件下和微壓差條件下的監測數據進行深入分析,同時與現有正倒垂線監測數據進行對比分析,驗證烏江渡水電站激光準直系統的可行性。
3 激光準直系統監測資料分析
烏江渡水電站激光準直監測系統分別在真空條件和微壓差條件下進行觀測,其中真空條件下觀測時間序列為2011年12月1日至2012年12月6日,微壓差條件下觀測時間序列為2012年12月8日至2013年5月13日。
各測點位移:上、下游方向(徑向)以X表示,向下游為正,向上游為負;左、右兩岸方向(切向)以Y表示,向左岸為正,向右岸為負;垂直位移以Z表示,上抬為正,下沉為負。
3.1 真空條件下
各測點位移測值變化過程線見圖4,2012年5月12日至2012年7月31日期間激光準直系統發生故障,無監測數據,其余時段由于測值序列較短,各壩段測點無明顯的周期性變化,無異常變化。靠近兩岸處測點沿上下游方向水平位移和垂直位移均比同期其余測點變化小;左右岸方向水平位移的變幅相對上下游方向位移變幅明顯為小,右岸R5~R9測點過程線變化規律基本一致,左岸R10~R16測點過程線變化規律也基本一致,即過程線中峰谷值出現的時間基本一致;布置在壩段樓梯壩段的上測點R12(726)和下測點R12(713)過程線變化規律基本一致,即過程線中峰谷出現的時間基本相同,符合同壩段測點相對變形趨于一致的基本規律。
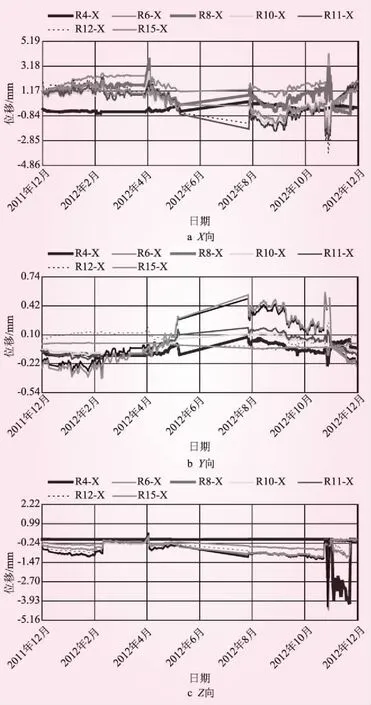
圖4 激光準直變形監測系統各測點位移測值過程線
選擇激光準直系統在2012年不同季節(2月、8月)的監測資料繪制位移變化曲線(見圖5)并進行分析。可知,大部分壩段測點沿上下游方向位移變化曲線低溫季節在上,高溫季節在下,表明低溫季節向下游變形,高溫季節向上游變形,這符合混凝土壩溫度對壩體水平位移影響的變化規律;向下游最大位移發生在拱冠處測點,向上游最大位移發生在左岸~壩段。①~壩段各測點無論高溫季節還是低溫季節向左右岸方向位移均不大,說明其受溫度影響不大;~壩段分布曲線高溫季節在上,低溫季節在下,說明高溫季節向左岸變形,低溫季節向右岸變形,也符合溫度對壩體位移影響的變化規律。無論高溫季節還是低溫季節各壩段測點垂直位移測值非常接近,說明溫度對垂直位移影響不大[1]。
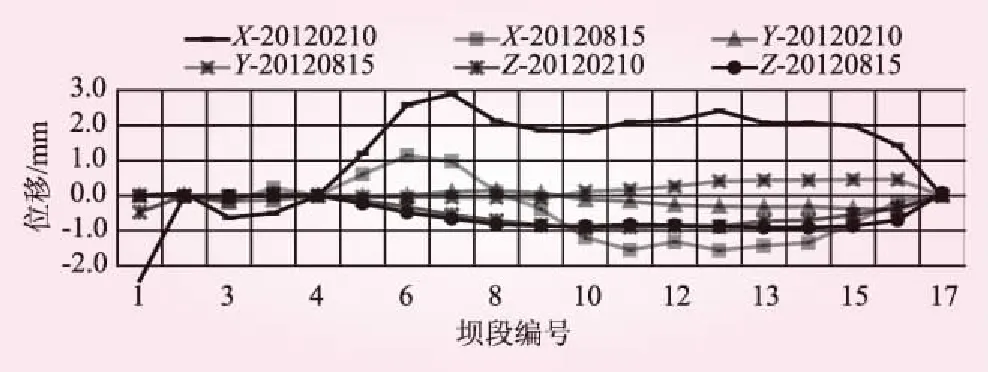
圖5 位移變化曲線示意
總體來說,真空條件下各測點變形基本符合壩體變形變化一般規律,但變化量相對較小,系統敏感性較低。
3.2 微壓差條件下
2012年12月6日至2013年5月13日,對激光準直系統充裝惰性氣體進行了微壓差試驗,各測點變化過程線見圖6。
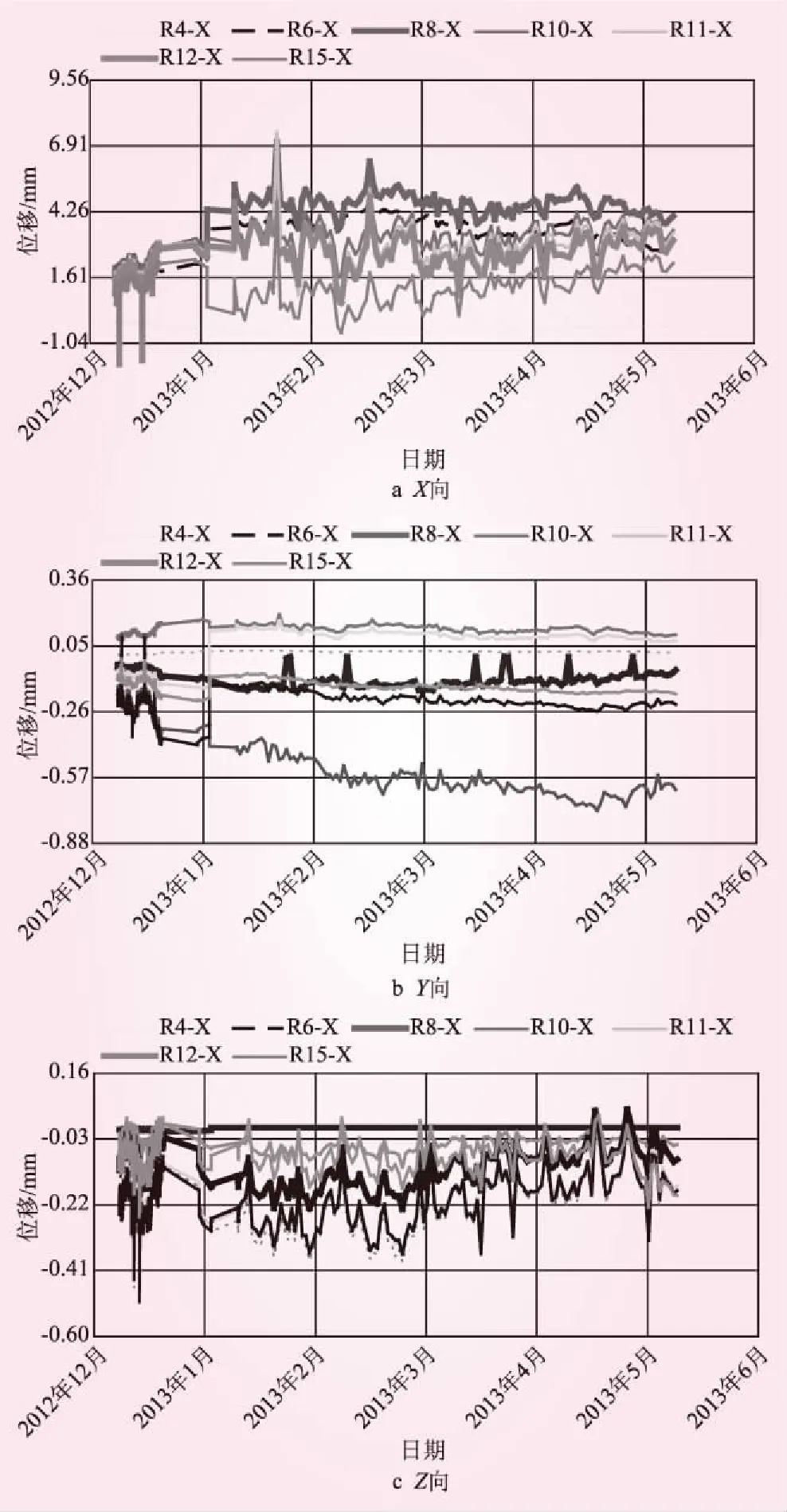
圖6 激光準直變形監測系統各測點測值過程線
由于測值序列較短,各壩段測點監測數據無明顯周期性變化。大部分測點左右岸方向和垂直方向的位移測值較小,其變化幅度也相對較小,相對于沿X向位移變幅也較小;對比不同年份相同時段上下游方向的水平位移測值,微壓差條件下比真空條件下的測值要大,測值過程線的變化規律也較為明顯。各壩段沿左右岸方向和沿垂直方向位移測值均不大,遠小于X向的測值,符合一般規律。
將2012年12月至2013年5月微壓差條件下激光準直變形監測數據與2011年12月至2012年5月真空條件下的監測數據進行對比分析,微壓差條件下各測點的激光準直徑向水平位移測值比真空條件下的測值大,說明激光準直變形監測系統在微壓差條件的性能比真空條件下的工作性能要好,靈敏高,其過程線所反映的變化規律更為明顯。
激光準直變形監測系統采用了真空激光準直與微壓差激光準直兩種工作模式[4],受現場環境條件、系統管道的密封條件等因素影響,系統運行的可靠性是不相同的。對比分析初步表明,真空條件下對系統管道密封要求較高,維持其真空狀態所花費的代價較大,而微壓差條件下觀測成果相對較好,對系統管道的密封要求不高,運行穩定可靠。
4 監測數據對比分析
激光準直系統與壩體正、倒垂線變形監測系統在布置上有3處交集點,具體位置及各測點編號見表1。
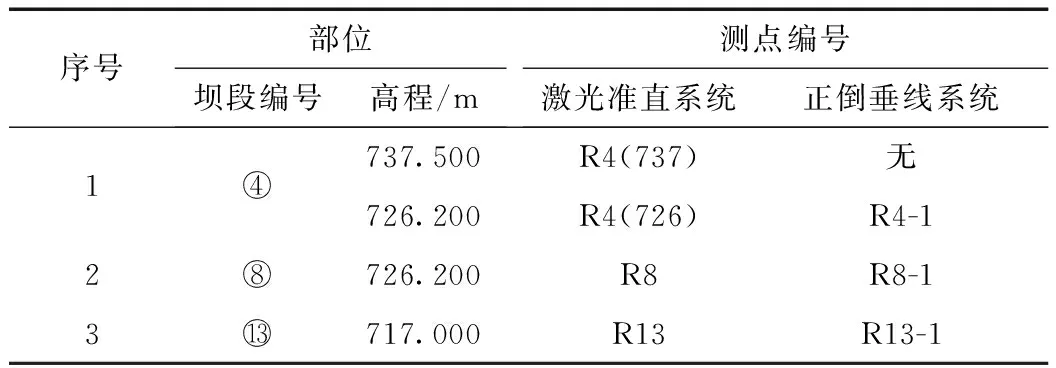
表1 交集點位及測點編號匯總
2011年12月1日至2012年12月6日采用真空方式進行監測,2012年12月8日至2013年5月13日采用微壓差方式進行監測,分別將正、倒垂線監測數據與真空條件下和微壓差條件下激光準直變形監測系統的數據進行對比分析。
4.1 真空條件下對比分析
垂線與真空激光準直變形監測系統對應交集點如圖7所示。由圖7可知,④壩段X方向激光準直變形監測系統的測值相對偏小,其相關性不明顯;Y方向正常情況下測值均不大,其變化規律基本相似。⑧壩段X方向具有可比性的時段很少,在9月前后的過程線總體變化規律有一定的相似性;Y方向全時段測值變幅均很小,符合一般性規律。壩段X方向9月前后的過程線不太平滑,但總體變化規律有一定的相似性;Y方向8月中旬垂線系統發生了約2 mm階躍式跳變,排除其影響后測值均不大,其變化規律總體上基本相似。總之,在真空條件下,激光準直變形監測系統與正、倒垂線交集點變化規律的一致性存在部分差異。
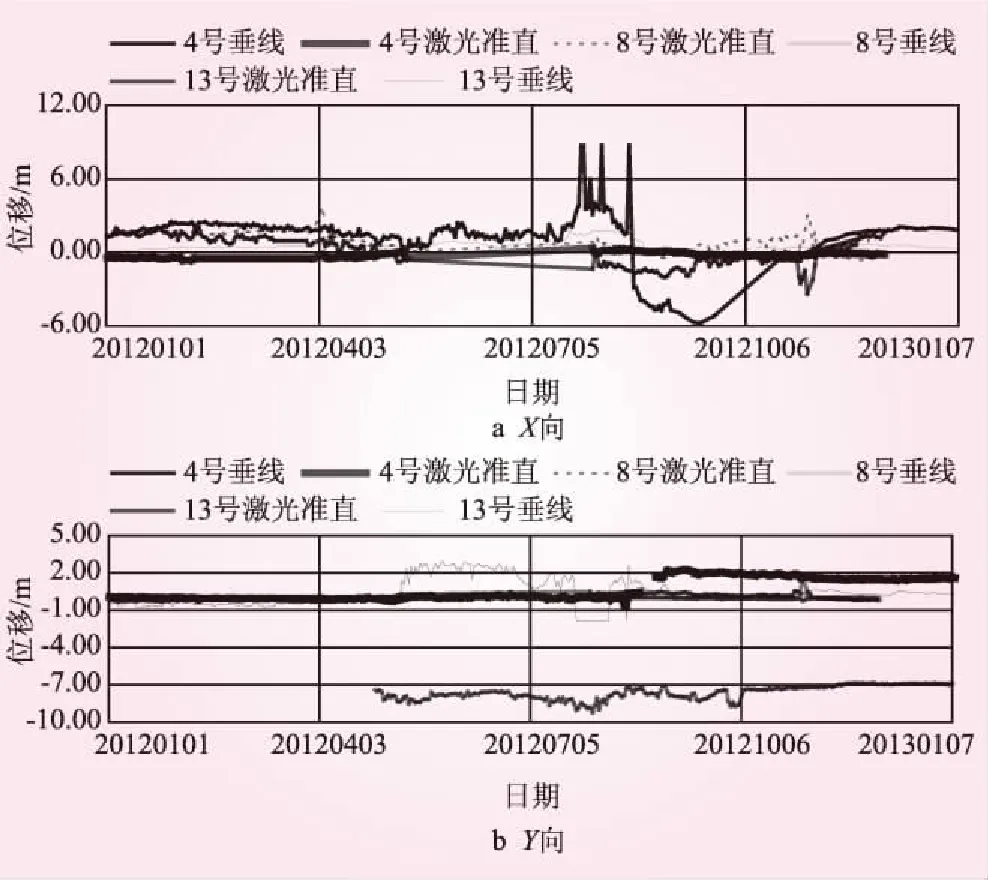
圖7 交集點左右岸方向水平位移測值過程線
4.2 微壓差條件下對比分析
微壓差激光準直變形監測時段從2012年12月8日至2013年5月13日止,共有約5個月的監測資料,由于④壩段和⑧壩段正、倒垂線采集模塊出現故障無法通訊導致該時段R4-1和R8-1無監測數據,因此,僅將壩段垂線測點(R13-1)與激光準直變形監測系統測點(R13)相關交集點的監測數據進行對比分析,過程線如圖8所示。
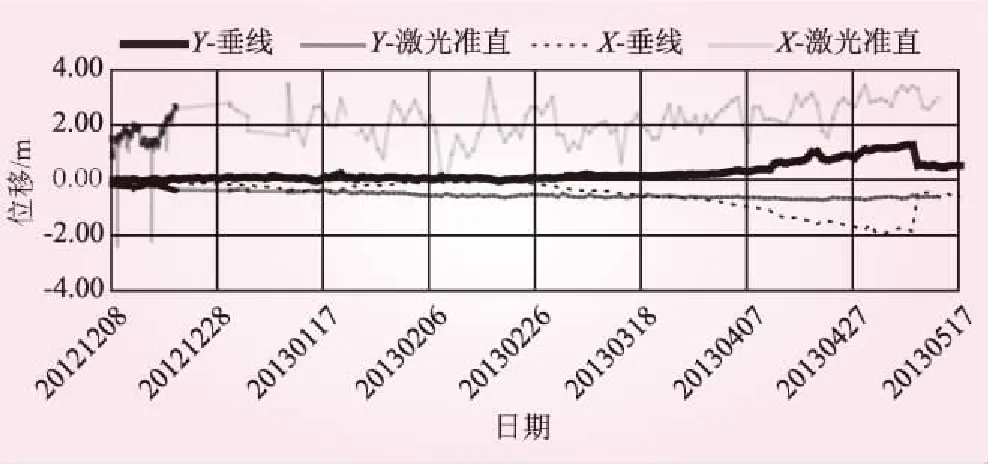
圖8 水平位移測值過程線
表2 壩段激光準直與垂線測點對應測值
表2 壩段激光準直與垂線測點對應測值
序號日期上游水位/m氣溫/℃垂線測點測值/mm激光測點測值/mm120121213752.077.250.781.92220130319739.2018.500.181.79
5 結論與建議
激光準直變形監測系統能夠反映大壩變形變化規律,可用于拱壩變形自動化監測。激光準直變形監測系統在微壓差條件下的性能比真空條件下要好,靈敏度高,反映的變化規律更為明顯。真空條件對系統管道密封要求較高,而微壓差條件下系統管道密封要求不高,可靠性高。因此,建議烏江渡工程后期運行的位移變形監測采用微壓差工作模式,并與垂線系統結合進行綜合分析。
[1] 李珍照. 大壩安全監測[M]. 北京: 中國電力出版社, 1997.
[2] 彭欣欣, 郝靈, 張鵬, 等. 真空激光變形監測系統在小灣雙曲拱壩中的應用[J]. 水力發電, 2015, 41(10): 72- 74.
[3] 楊仁, 潘正風. 激光導線系統測定拱壩位移[J]. 武漢測繪科技大學學報, 1988(3): 1- 3.
[4] 鄧念武, 葉澤榮, 龔玉珍. 白山拱壩位移激光監測自動化系統研究[J]. 大地測量與地球動力學, 2002(2): 122- 123.
[5] 田國民, 尹望軍. 烏江渡激光準直變形監測技術應用[J]. 商品與質量, 2015(50): 123- 124.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中華詩詞(2020年1期)2020-09-21 09:24:52
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
小學生作文(中高年級適用)(2018年5期)2018-06-11 01:22:56
數學小靈通·3-4年級(2017年10期)2017-11-08 08:42:59
家庭影院技術(2017年9期)2017-09-26 03:41:45
中學生數理化·七年級數學人教版(2017年11期)2017-04-23 07:18:00