國產化400 MW抽水蓄能機組背靠背啟動的試驗分析
2017-03-21 05:34:48鄧拓夫
中國農村水利水電 2017年9期
趙 博,高 翔,秦 俊,鄧拓夫
(1. 國網新源控股有限公司技術中心,北京 100161;2. 國家電網公司抽水蓄能技術實驗室,北京 100161)
0 引 言
背靠背啟動是抽水蓄能機組水泵方向啟動的備用啟動方式。當電廠的SFC設備故障或檢修時,電廠將使用背靠背啟動來進行機組的水泵方向啟動。背靠背啟動涉及拖動機與被拖動機的監控、勵磁、調速器、保護以及啟動母線等多個設備的協同配合,且不同廠家的設備控制原理各有不同,啟動成功難度相對較大。近些年,國內學者及現場試驗人員針對背靠背啟動進行了廣泛分析。文獻[1]中,作者分析了背靠背啟動過程中發電電動機的狀態方程,提出拖動機與被拖動機的勵磁電流要合理配合,文中給出的啟動成功的仿真案例,拖動機與被拖動機的勵磁電流值分別為額定空載勵磁電流的1.4倍和1.2倍。文獻[2]根據仿真計算結果,認為初始轉差角對啟動成敗的影響可以忽略。另外,文獻[2]提出在2機進入同步加速階段前,采用較小勵磁電壓和較慢導葉開啟速度的控制策略,并仿真證明了這種策略的可行性。結合現場調試經驗,文獻[3]給出了背靠背啟動的常用流程,并推薦了先快后慢的導葉開啟規律。背靠背啟動過程中,被拖動機發生故障跳機時,2臺機組勵磁系統不能同時切除,可能引起啟動母線過流的現象。針對這一現象,文獻[4]提出在LCU及保護之間增加硬接線控制回路的方法,解決了事故停機時,2臺機組勵磁系統切除的次序問題。文獻[5]介紹了背靠背啟動低頻階段對主機輔機等設備的影響,分析了背靠背啟動對發變組保護的影響。綜合以上文獻的分析,2臺機組勵磁系統的配合以及調速器導葉的開啟規律是影響背靠背啟動成功與否的關鍵參數。目前的文獻中,針對勵磁系統配合以及調速器導葉開啟規律的分析大多為計算機仿真,且對背靠背啟動的參數設置規律尚未統一認識。實際應用中,各設備參數均有限制值,現場試驗時需協同配合,選擇合理的參數。本文根據國內浙江某新建抽水蓄能電站400 MW機組背靠背啟動的試驗過程,重點分析導葉開啟規律以及拖動機與被拖動機的勵磁配合規律對啟動過程的影響,對國產化400 MW級機組的背靠背啟動試驗給出合理建議。
1 背靠背啟動的電氣原理及監控流程
1.1 背靠背啟動的電氣原理
國內某400 MW抽水蓄能電站的1、2號機組背靠背啟動的電氣主接線見圖1。2臺機組型號相同,通過啟動母線電氣相連。拖動刀在發電機出口斷路器(GCB)與換向刀閘(PRD)之間,被拖動刀在GCB與發電電動機之間。啟動前,被拖動機組執行水車室調相壓水操作,使轉子處于空氣之中,以減小啟動阻力矩。背靠背啟動過程中,從能力轉換的角度看,水的勢能和動能轉換成了拖動機的動能,再經過電磁轉矩的傳輸,轉換成了被拖動機的動能,還有一小部分能量經由機械損耗和電磁損耗轉換成了熱量。拖動機的轉子機械方程如下:
(1)
式中,p為微分算子;ωg為機械角速度;Tmg為輸入機械轉矩;Teg為電磁阻力轉矩;Tbg為機械阻力轉矩;Hg為轉動慣量。
輸入轉矩的變化由調速器控制導葉開啟規律調節。
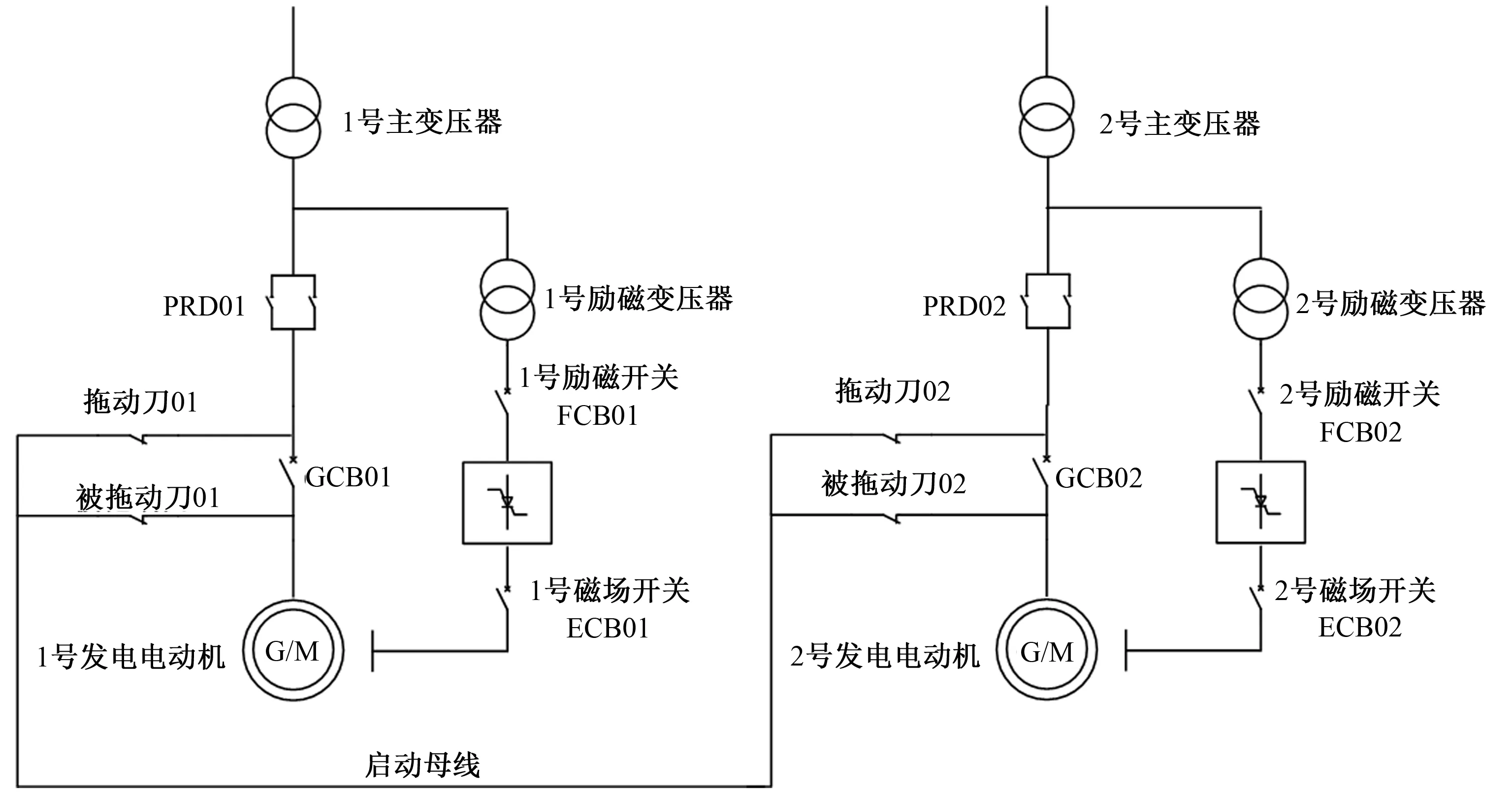
圖1 機組背靠背啟動電氣主接線
型號相同的2臺機組背靠背啟動的電氣連接方程如下[1,2]:
idm=-cosδidg+sinδiqg
(2)
iqm=-sinδidg-cosδiqg
(3)
udm=cosδudg-sinδuqg
(4)
uqm=sinδudg+cosδuqg
(5)
假定飽和只發生在主磁路,電機的電磁轉矩公式如下:
Te=[-Xdid+Xadifd+Xadild]iq-(-Xqiq+Xaqilq)id
(6)
式中:下標d表示直軸分量,q表示交軸分量,m表示被拖動機,g表示拖動機;δ表示2機轉角差;Xd、Xq分別為直軸和交軸電抗;Xad、Xaq分別為直軸和交軸電樞反應電抗,ifd為勵磁電流的直軸分量,ild、ilq分別為阻尼繞組中電流的直軸和交軸分量。
可以看出,被拖動機的輸入電磁轉矩既與被拖動機的勵磁電流有關,也與被拖動機的定子電流有關,而被拖動機的定子電流也受拖動機的勵磁電流影響。而且實際電機中,定子電流的直軸與交軸分量又會對主電抗與漏電抗產生影響。由此可見,2機勵磁電流對電磁轉矩的影響是非線性的,2者需要合理配合,以保證拖動機向被拖動機提供足夠的電磁力矩。
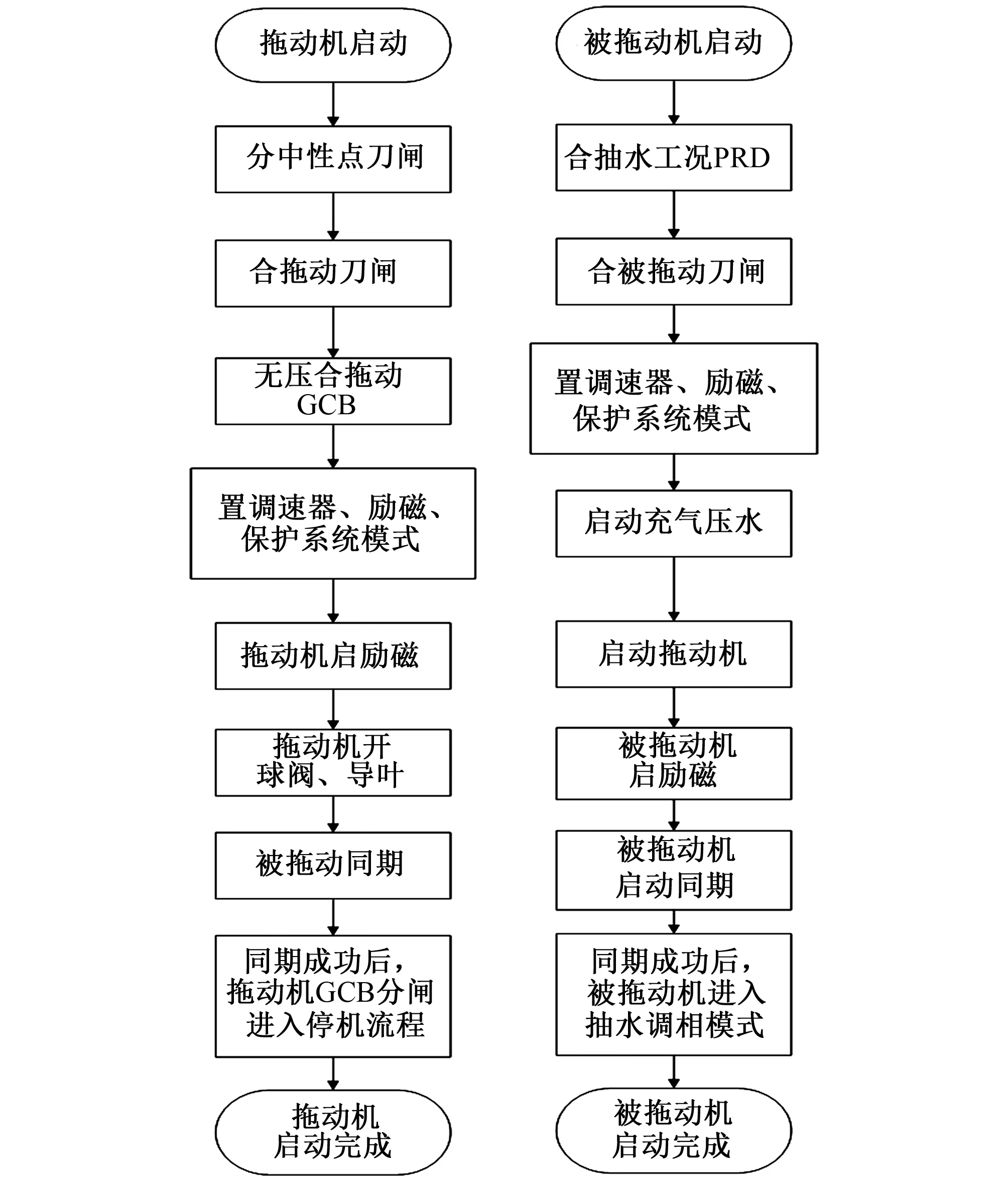
圖2 背靠背啟動監控流程
1.2 背靠背啟動的監控流程分析
背靠背啟動主要的監控流程見圖2。以下3點需要特別關注:①拖動機啟動的第1步是分中性點刀閘,而被拖動機中性點刀閘必須合閘,這是因為發電電動機并網運行時,中性點需要經高阻接地,而背靠背啟動時,不能有2點接地,否則會引起保護動作。②并網時,GCB合閘需要同期裝置判斷GCB兩端的電壓信號滿足合閘條件,只有在背靠背啟動前,合拖動機GCB時,同期裝置是在GCB兩端都沒有電壓的情況下,下達合閘指令。由于無壓合GCB這一功能在背靠背啟動前不會使用,因此需要監控廠家人員在背靠背啟動試驗前,反復驗證這一功能,否則,容易造成無壓合失敗,導致啟動流程退出。③被拖動機在啟動前要進行壓水充氣,使轉輪浸沒在空氣中,以減少啟動過程中的摩擦阻力。
2 重要參數選擇的試驗分析
機組運行的安全性是抽水蓄能電站運行的重中之重。因此,機組背靠背啟動并不是要求越快越好。更短的啟動時間,需要更大的輸入力矩,即更快的導葉開啟規律,導水機構上的壓力變化更大,特別是啟動失敗情況下,機組的安全隱患更大。目前,還沒有準確的理論仿真計算來較為準確地指出每個不同電站的背靠背啟動參數設置。現場試驗過程中,都是根據經驗在一定范圍內進行參數的單變量微調,使機組背靠背啟動順利,并且啟動時間滿足合同要求。
2.1 導葉開啟規律的試驗分析
背靠背啟動過程中,拖動機球閥全開后,拖動機通過調節導葉開度來改變輸入力矩。如果導葉開啟速率過小,開始時,無法克服2臺機組的摩擦阻力以啟動機組。導葉開始速率過大,被拖動機容易跟不上拖動機的轉速上升速率,導致2機失步。另外,在機組達到額定轉速前,轉子上的阻尼繞組會產生感應電流,且感應電流隨導葉開啟速率的增大而增大。經了解,國內主機廠家在設計發電電動機時,充分考慮到了阻尼繞組的發熱問題,一般都留有較大裕量。
現場試驗中,拖動機勵磁電流值設置為額定空載勵磁電流,被拖動機勵磁電流值設置為0.8倍的額定空載勵磁電流,勵磁電流的配合將在下一節中討論。導葉開啟規律最初設置為先以每秒1%的開啟速率快速將導葉開到最大開度的10%,再以每秒0.2%慢速上升,1號機為拖動機,2號機為被拖動機。但是,這次啟動并未成功,拖動機的導葉已開到15%,拖動機與被拖動機仍并未轉動,試驗人員按緊急事故停機按鈕,流程退出。分析啟動失敗原因,導葉開度第1段開啟速率較慢,輸入力矩較小,無法克服2臺機組的靜摩擦阻力矩。
之后,調整導葉開啟規律,將第1段開啟速率增加到每秒1.5%,第2段依然是每秒上升0.2%,電氣開限設置為導葉最大開度的20%,將這一導葉開啟規律命名為導葉開啟規律01。以1號機為拖動機,2號機為被拖動機,背靠背啟動成功,拖動機轉速的變化規律見圖3。調整電氣開限,將電氣開限設置為導葉最大開度的25%,將這一導葉開啟規律命名為導葉開啟規律02。以2號機為拖動機,1號機為被拖動機,背靠背啟動成功,拖動機轉速變化規律見圖3。圖3中,導葉開啟規律01 2段的開啟速率實測值分別為每秒1.41%和0.196%,而導葉開啟規律02 2段的開啟速率實測值分別為每秒1.59%和0.205%。同樣的設置值,在不同機組上測得的反饋值略有區別,實測值與給定值之間存在±6%左右的誤差,這一誤差在工程應用可接受的范圍內。
2次啟動過程中,機組導葉開度快速開到9%左右時,拖動機與被拖動機開始轉動,之后,2機進入同步快速加速段,到達90%額定轉速后,同期裝置啟動,導葉開度受同期裝置控制,機組緩慢加速至額定轉速附近,同期并網成功后,拖動機GCB分閘,導葉關閉,機組走停機流程。在導葉開啟規律01作用下,機組轉速在達到70%額定轉速時,導葉開度已達電氣開限,導葉開度不再增加,機組加速度度減小,轉速達到90%額定開度后,導葉進入同期裝置控制模式。在導葉開啟規律02的作用下,在未達到導葉電氣開限前,機組轉速已達90%額定轉速,此時,導葉開度達到24%,2機同步加速,加速度幾乎保持不變。同期裝置啟動后,迅速減小導葉開度,以使機組轉速平穩上升至額定轉速,同期并網時的導葉開度已減小至20%額定轉速左右。
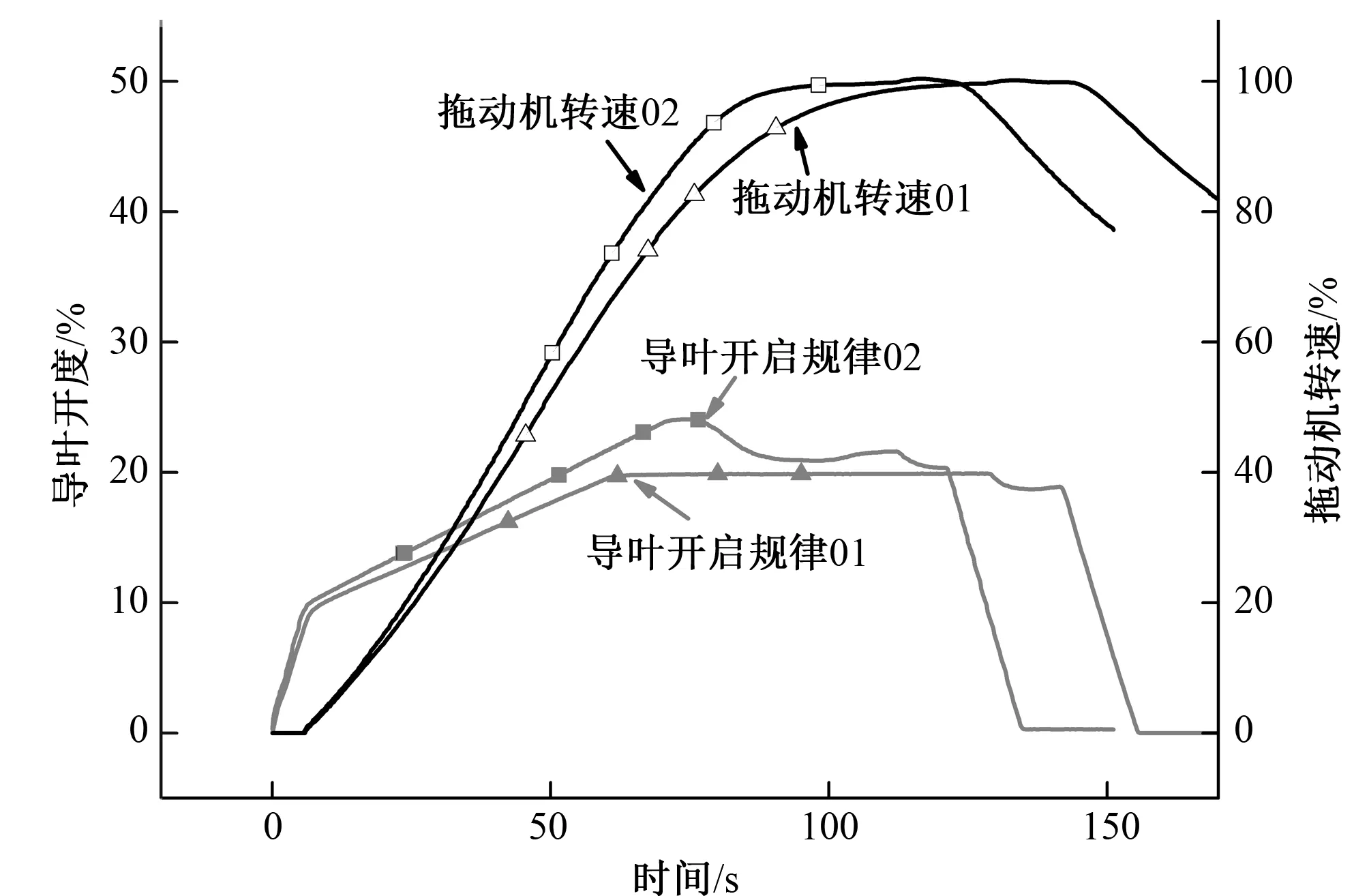
圖3 2種導葉開啟規律下的拖動機轉速曲線
在圖3所示的2種導葉開度控制規律下,機組從靜止到同期并網的時間分別為121 s和140 s,遠小于合同規定的240 s。如果將導葉電氣開限設置為較高的25%最大開度,機組啟動時間較短,但同期裝置啟動后,導葉開度的改變速率較大。將導葉電氣開限設置為略高于單機發電空載運行時的導葉開度,此電站為20%最大開度,機組啟動速率在導葉達到電氣開限后逐漸減小,同期裝置啟動后,導葉開度的變化速率比較平穩,但啟動時間較長。綜合考慮以上因素,在之后的背靠背啟動試驗中,將導葉開啟規律設置為2段式開啟。第1段,導葉以每秒1.5%的增速,快速開到最大開度的10%;第2段,以每秒0.2%的增速增加到電氣開限。
2.2 勵磁電流配合的試驗分析
勵磁電流的大小影響著機組電磁力矩的傳遞,也直接影響著背靠背啟動的成敗。拖動機組的勵磁電流值在背靠背啟動過程中保持不變,而被拖動機的勵磁電流值在同期裝置啟動之前會保持恒定值,而同期裝置啟動后,會根據機端電壓與電網電壓調節被拖動機的勵磁電流,以滿足同期并網條件。由于被拖動機同期并網時的勵磁電流接近于單機發電方向空載并網時的勵磁電流值,因此,與之對應的拖動機的勵磁電流值宜設置為額定空載勵磁電流。被拖動機的勵磁電流值分別設置為0.9倍、0.8倍和0.75倍額定空載勵磁電流值,額定空載電流值為976 A。
被拖動機的勵磁電流設置為0.9倍額定空載勵磁電流時,背靠背啟動失敗。分析啟動失敗原因,被拖動機勵磁電流較大,導致空載電壓較高,2臺機組電壓幅值差較小,啟動電流不容易通過啟動母線注入被拖動機組中,啟動力矩小。當2臺機組開始轉動后,拖動機轉速快速上升,而被拖動機加速較慢,迅速引起頻差保護動作,機組跳機。
將被拖動機的勵磁電流降低至0.8倍和0.75倍的空載額定勵磁電流,背靠背啟動均成功,被拖動機轉速曲線見圖4,被拖動機輸入的有功功率見圖5。從圖4、圖5中可以看出,在相同的導葉開啟規律,2組不同的勵磁電流下,被拖動機的轉速上升曲線幾乎重合,而從拖動機組中吸收的有功功率曲線也幾乎重合。被拖動機轉速上升到90%額定空載轉速前,輸入的有功功率持續增加,同期裝置啟動后,減小導葉開度,降低機組轉速的上升率,被拖動機吸收的有功功率也迅速下降。圖4和圖5中,分析2條曲線分別近乎重合的原因,2臺機組啟動的原動力來源于拖動機的水輪機,被拖動機的啟動力矩來源于電磁轉矩。從能量傳遞的角度分析,由拖動機傳遞給被拖動機的電磁力矩為水輪機的輸入機械力矩減去拖動機的損耗阻力矩,而導葉開啟規律不變的情況下,這2者幾乎不變。再分析被拖動機的電磁轉矩。被拖動機的勵磁電流為零時,電磁轉矩為零,逐漸增大勵磁電流,電磁轉矩也隨之逐漸增大;當勵磁電流增大到一定程度后,可傳遞的電磁轉矩已達到原動機的輸入力矩與損耗阻力矩的差值,再適當增大勵磁電流并不能增加傳遞的電磁力矩;而如果繼續增大被拖動機勵磁電流,將導致被拖動機的空載電壓過高,拖動機與被拖動機的電壓差較小,啟動電流反而不容易通過啟動母線注入被拖動機組中,進而引起電磁轉矩降低。因此,被拖動機的勵磁電流過小或過大均不能產生足夠的啟動力矩使背靠背啟動成功。由于背靠背啟動數學模型的非線性,這一被拖動機電磁轉矩隨勵磁電流的變化曲線,很難通過試驗測得。本文試驗中的0.9倍額定空載勵磁電流應已進入勵磁電流過大的區域,因此啟動失敗。而勵磁電流過小導致啟動失敗的試驗,由于現場試驗時間的限制,且該試驗對工程實踐不具價值,因此,并未進行試驗。被拖動機的勵磁電流值存在一個合適的區間,使得電磁轉矩接近最大值,本文試驗的0.8倍和0.75倍的空載額定勵磁電流值,應已處在此區間范圍內,而通過試驗的方法很難確定這一區間的上限與下限。而工程實際應用中,也不需找到此區間的邊界,只需找到一個合適的運行點,使得背靠背啟動能按合同要求時間完成即可。
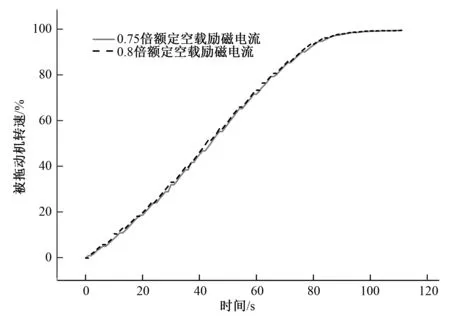
圖4 被拖動機在不同勵磁電流下的啟動曲線
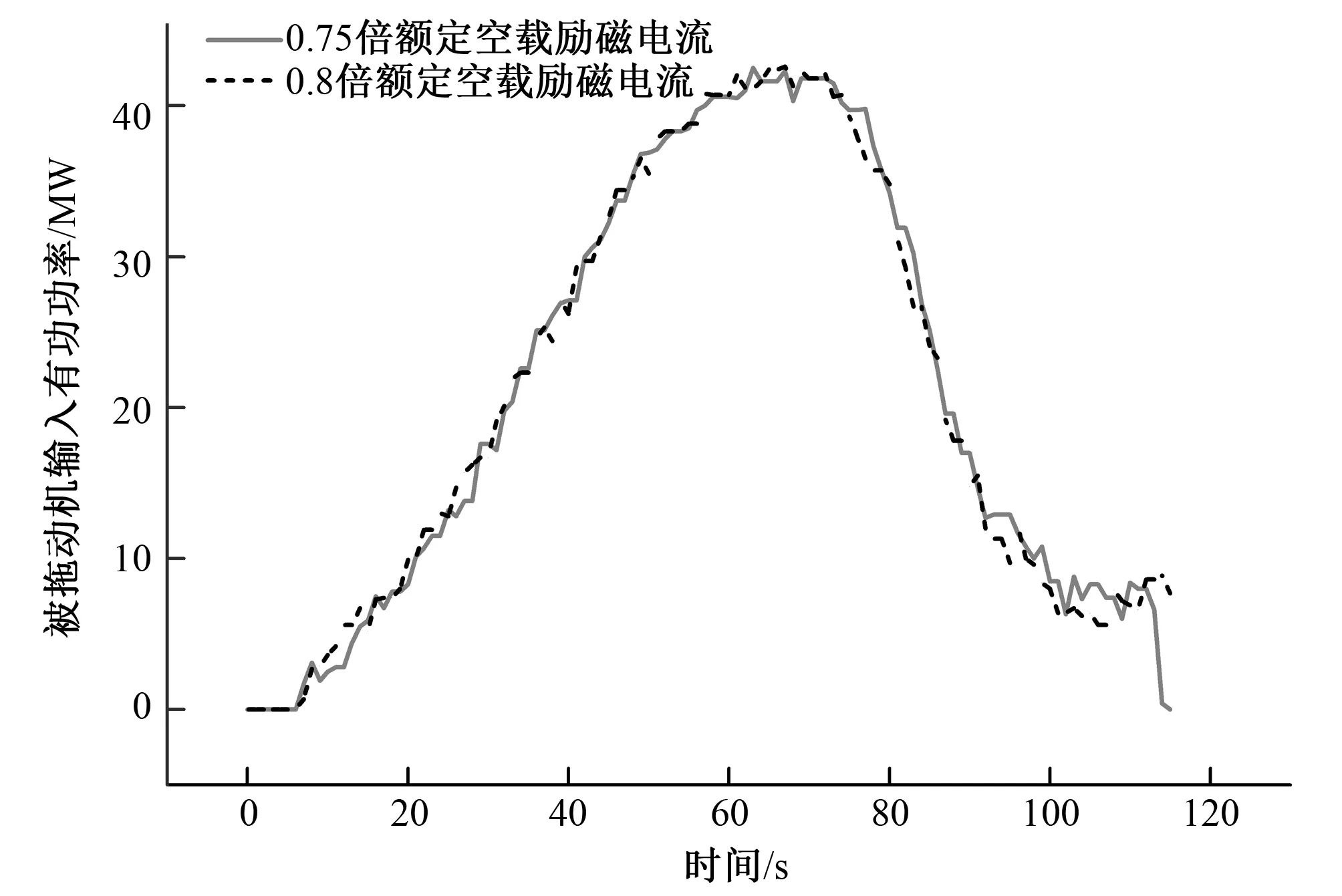
圖5 被拖動機在不同勵磁電流下的輸入有功功率曲線
在被拖動機轉速達到90%額定轉速,同期裝置啟動后,同期裝置會逐漸調節被拖動機的勵磁電流,以使被拖動機機端電壓與電網電壓達到同期合閘要求。同期并網時,勵磁電流值一般在額定空載勵磁電流附近。因此,在同期裝置啟動后,從被拖動機勵磁電流的調節時間上比較,被拖動機初始勵磁電流設置為0.8倍額定空載勵磁電流比0.75倍額定空載勵磁電流調節時間更短。綜合以上分析,被拖動機的勵磁電流值設置為0.8倍的空載勵磁電流更加合理。
3 其他原因導致啟動失敗的案例分析
現場調試期間,在導葉開啟規律和拖動機與被拖動機的勵磁電流值均設置得當后,背靠背啟動過程中,仍出現過幾次啟動失敗的案例,具體原因分析如下。
(1)調速器導葉開度超過電氣開限。在背靠背拖動過程中,此電站使用的調速器在原始程序中設計了導葉電氣開限值,這一設置也有其必要性。當導葉開啟規律或勵磁電流配合值設置不當時,可能導致雖然導葉逐漸開啟,但拖動機與被拖動機均未啟動,或拖動機轉速突然上升,明顯高于被拖動機轉速,2機突然失步。此時,機組會立即執行跳機流程,2臺機勵磁跳開后,由于導葉關閉需要一定時間,拖動機轉速會迅速上升,如果此時的導葉開度過大,拖動機很有可能迅速升速,甚至遠超過額定轉速。因此,需要設定調速器導葉開度的上限,防止故障情況下,拖動機轉速上升過高。這一導葉開度比機組額定轉速空轉狀態下的導葉開度(導葉最大開度的19%)略大,原始設計值為導葉最大開度的20%。在大多數的背靠背啟動試驗中,導葉實際開度均未超過電氣開限,啟動成功。而在少數幾次背靠背啟動中,在拖動機機組未達到額定轉速前,導葉開度已達到電氣開限,同期裝置啟動后,無法通過增大導葉開度來使機組轉速到達額定轉速,到達同期裝置設置的最大同期時間后,同期失敗,保護動作,機組跳機。分析原因,幾次啟動失敗的案例中,實際運行水頭相比額定水頭較低,同樣的導葉開度下,水輪機產生的力矩略小,機組無法加速到額定轉速。調試時,解決此問題的辦法有2種:①請調速器廠家在源程序上略微增大電氣開限的上限;②當調速器廠家未在現場,或無法改動源程序時,只能采用在調試器觸摸屏面板上手動逐漸增大電氣開限的方式,當導葉的實際開限接近電氣開限時,手動點擊增加開限按鈕,以每次0.25%的速率遞加,直至同期成功。結合前面的分析,此電站最終將電氣開限調整為導葉最大開度的25%。
(2)同期超時,啟動失敗。電站共有4臺機組,在做3號機拖動4號機背靠背啟動的實驗時,在同期并網的過程中,4號機組連續出現了3次同期并網失敗。檢查同期裝置的報文,顯示對象側電壓過低,也就是機端電壓與電網電壓的電壓幅值差值沒有達到同期并網的要求,同期裝置調節的時間超過設定的時間后,電壓差值仍然沒有滿足并網要求,同期失敗,機組事故停機。啟動失敗后,現場從監控調取了機端電壓與電網電壓的測量值,經對比計算,2者的電壓差值滿足同期并網要求。初步判斷,為同期裝置內部故障。之后,又進行了1號機組拖動4號機組背靠背啟動的試驗以及4號機組單獨發電空載并網和抽水調相并網的試驗,也出現了同期失敗的現象。由此可以證明,同期裝置內部發生了故障。與監控廠家協商后,對同期裝置進行了更換,再次進行3號機拖動4號機的背靠背啟動試驗,同期并網成功。
4 結 語
本文簡要分析了背靠背啟動的原理以及監控流程中的注意事項,結合現場實際試驗方法,選出了適合某電站國產化400 MW抽水蓄能機組背靠背啟動的重要參數,主要結論如下。
(1)導葉開啟規律建議選擇先快后慢的方式,先以每秒1.5%的速率開到最大導葉開度的10%,再以每秒0.2%的速率開到導葉電氣開限值。
(2)拖動機的勵磁電流值建議設置為額定空載勵磁電流值,被拖動機的勵磁電流值設置為0.8倍額定空載勵磁電流值。
(3)導葉電氣開限設置較低及同期裝置故障等問題均可能引起背靠背啟動失敗。導葉電氣開限設置值建議略高于單臺機組發電空載導葉開度,此電站導葉電氣開限設置為25%最大導葉開度。
□
[1] 王自濤, 戈寶軍. 抽水蓄能電機背靠背啟動過程的計算機仿真[J]. 哈爾濱理工大學學報, 1999,(3):41-45.
[2] 呂宏水, 馮 勇, 朱曉東,等. 抽水蓄能機組背靠背啟動的研究[J]. 水電廠自動化, 2006,(4):182-189.
[3] 周喜軍, 周 攀, 秦 俊,等. 抽水蓄能機組背靠背啟動策略分析與研究[J]. 水電自動化與大壩監測, 2014,(6):69-71.
[4] 王干軍, 趙 兵. 抽水蓄能機組背靠背啟動過程中機組勵磁配合[J]. 電力系統及其自動化學報, 2013,25(2):143-147.
[5] 馬 嵬, 鄭小剛. 可逆式抽水蓄能機組背靠背啟動過程控制探討[J]. 水電自動化與大壩監測, 2009,33(5):33-38.