脈沖激光測距中高精度時間間隔系統(tǒng)設(shè)計
2017-03-23 23:55:34田海軍楊婷趙楊輝
現(xiàn)代電子技術(shù) 2017年4期
田海軍+楊婷+趙楊輝
摘 要: 時間間隔測量系統(tǒng)采用基于時間數(shù)字轉(zhuǎn)換芯片TDC?GP22實現(xiàn)了高精度脈沖激光測距。采用高性能STM32單片機(jī)作為主控器,SPLLL90_3半導(dǎo)體激光二極管,AD500?9作為接收的光電探測器。測量結(jié)果通過SPI通信接口傳送給單片機(jī),經(jīng)單片機(jī)處理后的數(shù)據(jù)傳給LCD12864顯示器。測試結(jié)果表明,該測量方法精度可達(dá)65 ps,系統(tǒng)結(jié)構(gòu)簡單、可行性高。
關(guān)鍵詞: 時間間隔測量; TDC?GP22; 高精度脈沖激光測距; 光電探測器
中圖分類號: TN835?34; TP212.9 文獻(xiàn)標(biāo)識碼: A 文章編號: 1004?373X(2017)04?0155?04
Design of high?precision time interval measuring system for pulsed laser range finding
TIAN Haijun, YANG Ting, ZHAO Yanghui
(School of Automation Engineering, Northeast Electric Power University, Jilin 132000, China)
Abstract: In the time interval measurement system, the time digital converter chip TDC?GP22 is adopted to realize the high?precision pulsed laser range finding, the high?performance microcomputer STM32 is taken as the main controller, and the semiconductor laser diode SPLLL90?3 and AD500?9 are served as the receiving photoelectric detectors. The measured results are transmitted to the microcontroller through SPI communication interface, and then the processed data is transmitted to the display LCD12864. The test results indicate that the precision of the measuring method can reach up to 65 ps, and the system has simple structure and high feasibility.
Keywords: time interval measurement; TDC?GP22; high?precision pulsed laser range finding; photoelectric detector
0 引 言
脈沖激光測距具有測距精度高、探測距離遠(yuǎn)、峰值功率高、對光源相干性要求低等特點,廣泛用于工業(yè)、民用、航天、醫(yī)藥等領(lǐng)域。目前激光測距方法有脈沖測距法、光子計數(shù)測距法和三角測距法。相比后兩者,脈沖測距法測程長、精度高、反應(yīng)時間短及沒有光圈。脈沖的工作波長、上升時間、寬度、占空比、峰值功率及大氣折射率影響時間間隔測量精度,其中脈沖寬度越窄精度越高,脈沖功率越大測程越長。在火電廠激光煤礦地質(zhì)測量系統(tǒng)中需要對煤堆高度進(jìn)行精確測量。實踐中,通過時間間隔測量儀器測量激光飛行的時間間隔,測量占空比和功率會限制時間間隔的測量。因此,在激光煤礦地質(zhì)測量系統(tǒng)中時間間隔測量單元在整個系統(tǒng)中起著關(guān)鍵作用。本文提出了一種脈沖激光測距中高精度時間間隔測量系統(tǒng)的設(shè)計,TDC?GP22[1]芯片記錄激光接收和發(fā)射的時間信號差值,單片機(jī)STM32通過接口技術(shù)讀取測量結(jié)果并將結(jié)果送入顯示器,以實現(xiàn)距離測量。
1 脈沖激光測距系統(tǒng)
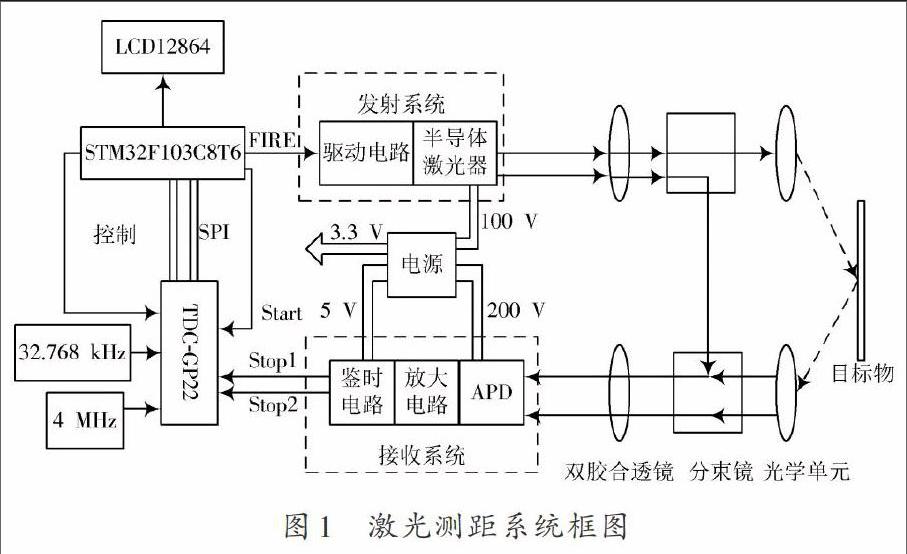
脈沖激光測距系統(tǒng)工作原理即單片機(jī)控制激光發(fā)射裝置發(fā)射占空比一定的激光脈沖,其中一小部分能量到達(dá)接收電路,然后光電探測器將微弱的光脈沖信號變成電脈沖信號并看作Start信號觸發(fā)時差測量。激光的大部分能量在空間中傳播,遇到目標(biāo)物后反射傳播到達(dá)接收電路,看作Stop信號結(jié)束測量,至此完成時差測量[2]。TDC?GP22芯片記錄Start脈沖到Stop脈沖之間的時差,用于計算目標(biāo)物到發(fā)射端的距離[3?4]。在上面的測量中,除了TDC?GP22芯片的時間間隔精度外,還有很多因素影響距離測量精度[5],比如光的傳輸介質(zhì)、光束的散射程度以及接收單元的靈敏度等。圖1為激光測距系統(tǒng)的結(jié)構(gòu)框圖。
2 TDC?GP22芯片的工作原理
德國ACAM公司生產(chǎn)的TDC?GP22芯片是CMOS結(jié)構(gòu)設(shè)計的高精度時間數(shù)字轉(zhuǎn)換芯片,時間間隔由邏輯門的傳輸延遲來量化,通過測量兩個或多個脈沖之間的時間間隔進(jìn)行精確測量[6]。TDC?GP22芯片的系統(tǒng)結(jié)構(gòu)主要由TDC模塊、溫度測量模塊、ALU算術(shù)邏輯模塊、控制時鐘模塊及串行接口模塊等組成。TDC?GP22芯片有兩種測量范圍,每個測量范圍的分辨率均能達(dá)到65 ps,測量范圍1為0~1.8 μs;測量范圍2為500 ns~4 ms。根據(jù)本系統(tǒng)測量要求,選擇芯片的測量范圍1實現(xiàn)高精度時間間隔測量。
TDC時間數(shù)字轉(zhuǎn)換單元由信號通過門電路的傳輸延遲實現(xiàn)高精度時間測量[7?9]。首先進(jìn)行系統(tǒng)初始化,由Start接收到有效脈沖信號觸發(fā),并在接收到Stop有效脈沖信號后結(jié)束工作。Start信號和Stop信號之間的時間間隔由粗值計數(shù)器的計數(shù)值和環(huán)形振蕩器的位置計算出來。
溫度和電壓對TDC時間測量系統(tǒng)有較大影響,因此通過測量一個時間間隔和外部脈沖,對比兩者之間的測量值校準(zhǔn)消除溫度和電壓變化帶來的誤差。在校準(zhǔn)時,TDC?GP22芯片能產(chǎn)生穩(wěn)定的時鐘信號,當(dāng)其對外部信號測量完成后,再測量1倍的Cal1內(nèi)部基準(zhǔn)時鐘周期和2倍的Cal2內(nèi)部基準(zhǔn)時鐘周期。參考時鐘周期值分別為Cal1,Cal2,參考時鐘信號是RefClk,即可得出Cal1, Cal2的值。
通過下式計算可得出校準(zhǔn)之后的精確時間差:
式中:RES_X為TDC時間間隔計數(shù)值;t為TDC校準(zhǔn)時間測量值。
3 系統(tǒng)硬件設(shè)計
3.1 激光發(fā)射電路設(shè)計
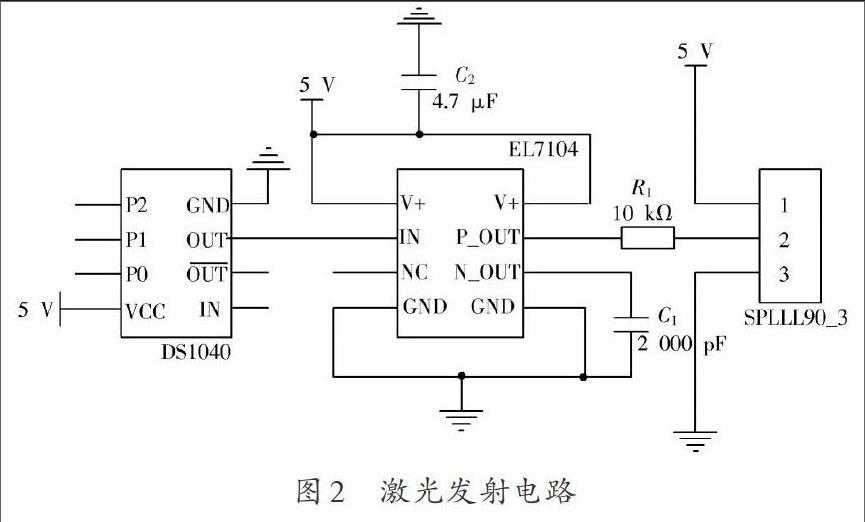
采用DALLLA公司生產(chǎn)的DS1040可編程脈沖發(fā)生器,DS1040芯片的P0~P2引腳分別與單片機(jī)的PA4~PA6引腳相連,通過單片機(jī)的I/O口輸出高低電平控制DS1040。驅(qū)動芯片采用東芝公司的EL7104C芯片,具有高速、響應(yīng)時間短、供電電流小、單通道的特點,通過內(nèi)部電路集成的增壓電路來增大輸入電壓。電容C1,C2濾除電源帶來的雜波。為了防止大電流燒壞芯片,電阻R1起限流作用。激光二極管采用OSRAM公司的SPLLL90_3,它是一款集成度高、體積小、低功耗的激光器,中心波長為905 nm、輸出峰值功率為70 W,主要應(yīng)用在激光測距領(lǐng)域內(nèi)。激光發(fā)射電路如圖2所示。
3.2 激光接收電路和鑒時電路設(shè)計
激光接收電路和鑒時測量電路設(shè)計如圖3所示,光電探測器選擇Silicon Sensor公司生產(chǎn)的AD500?9雪崩二極管[10]實現(xiàn)光電轉(zhuǎn)換,它具有響應(yīng)時間快、探測靈敏度高、增益大的特點,可提高測量精度和減少噪音干擾,因此把它看作脈沖計數(shù)單元的觸發(fā)信號。為保證探測器采集的數(shù)據(jù)不丟失,采用德州公司生產(chǎn)的UA733放大器將雪崩二極管轉(zhuǎn)換的電脈沖信號放大,它具有較高的穩(wěn)定性、低相位失真和快速的信息處理能力,能夠?qū)π盘柗糯?0~400倍。為了提高信噪比,在接收模塊中采用MAX913比較器,它是一款高速低耗的電平輸出比較器,通過設(shè)定電平值濾波。
在鑒時電路中,時間數(shù)字芯片TDC?GP22通過外接32.768 kHz基準(zhǔn)時鐘和4 MHz的石英晶振來控制和校準(zhǔn)時鐘。微控制器選用STM32F103C8T6單片機(jī),工作最高頻率為72 MHz,F(xiàn)LASH程序存儲器是64 KB和高達(dá)20 KB的SRAM,多達(dá)9個通信接口,其中包括2個I2C接口和2個SPI接口。支持2種JTAG接口調(diào)試模式和串行單線調(diào)試,能滿足低功耗要求。STM32系列單片機(jī)具有豐富的庫函數(shù)、成本低、功耗低、性能高的優(yōu)點,因此易于開發(fā)產(chǎn)品。單片機(jī)主要對TDC?GP22芯片的時間控制和寄存器配置,時間測量結(jié)果通過SPI接口技術(shù)送入單片機(jī),對整個系統(tǒng)進(jìn)行控制。
在圖3中TDC?GP22芯片的Stop1和Stop2端口控制脈沖的接收和發(fā)射信號,RSTN中斷輸入信號引腳和單片機(jī)的PA9引腳相連,低電平有效,未工作前芯片要復(fù)位。TDC?GP22的SSN,SO,SI,SCK引腳分別與單片機(jī)的PA4~PA7引腳相連,使用SPI1接口進(jìn)行數(shù)據(jù)通信。EN_START,EN_STOP1,EN_STOP2引腳分別與單片機(jī)的PC13~PC15引腳相連,INTN引腳接地。JTCK,JTMS,JNRST,JTDI,JTDI,RET引腳看作JTAG的引腳,為單片機(jī)調(diào)試和下載程序使用。在使用STM32系列單片機(jī)時需注意,所有VSS引腳須接地、VDD引腳須接VCC。
4 軟件設(shè)計
系統(tǒng)軟件設(shè)計流程圖如圖4所示,系統(tǒng)初始化包括LCD初始化、寄存器配置、TDC?GP22初始化。在未工作前,TDC?GP22芯片的en_start和en_stop引腳低電平有效,未選通Start和Stop通道。在對TDC?GP22寄存器配置完成之后,分別設(shè)置每個通道的采樣個數(shù)和測量范圍并確定ALU的計算方法。單片機(jī)給TDC?GP22發(fā)送開啟命令,確保TDC?GP22進(jìn)入測量狀態(tài),一旦TDC?GP22的start通道接收到有效信號時,此信號看作激光的一部分能量。
當(dāng)反射的激光信號到達(dá)接收單元時,反射光線對信號進(jìn)行處理后,TDC?GP22的Stop通道開始測量,在完成一次測量之后關(guān)閉Start和Stop通道。校準(zhǔn)TDC?GP22之后,單片機(jī)在中斷響應(yīng)到來后會讀取寄存器數(shù)值,若沒溢出,則TDC?GP22會記錄出時間間隔測量值。數(shù)據(jù)校準(zhǔn)格式是16進(jìn)制的32位浮點數(shù),每8位數(shù)據(jù)通過單片機(jī)的SPI口讀取一次,即分4次讀出校準(zhǔn)值。若有6次的數(shù)據(jù)一樣,則認(rèn)為測量結(jié)果正確,若不正確則刪除,重新校準(zhǔn)TDC?GP22并繼續(xù)測量。為了提高測量精度,在整個測量系統(tǒng)中需要每次對TDC?GP22初始化。在單片機(jī)系統(tǒng)設(shè)計中,C語言編寫的特點是易于維護(hù)、編寫代碼的效率及其重復(fù)率高等,因此C語言在單片機(jī)系統(tǒng)設(shè)計中得到了廣泛的應(yīng)用。
5 實驗結(jié)果
文中實現(xiàn)了脈沖激光測距中高精度時間間隔測量系統(tǒng)的設(shè)計,基于 TDC?GP22的測量范圍1和測量范圍2
進(jìn)行了大量的實驗測試。
分別計算出每組數(shù)據(jù)的平均值和標(biāo)準(zhǔn)差,繪制脈沖時間?測量誤差曲線如圖5所示。
6 結(jié) 論
測試結(jié)果表明,系統(tǒng)標(biāo)準(zhǔn)差的均值約為68 ps,與TDC?GP22標(biāo)準(zhǔn)相差3 ps。這是由于傳感器的制造工藝及外部因素難免出現(xiàn)一些誤差,致使測量誤差增加。該系統(tǒng)有效地提高了脈沖飛行時間的測量精度和穩(wěn)定性,優(yōu)化了系統(tǒng)的性能和電路結(jié)構(gòu),滿足了脈沖激光測距系統(tǒng)的精度要求。
參考文獻(xiàn)
[1] 楊佩,徐軍,王菲.基于TDC?GP2的高精度時間間隔測量系統(tǒng)的設(shè)計[J].電子科技,2010,23(7):45?48.
[2] 宋建輝,袁峰,丁振良.脈沖激光測距中高精度時間間隔的測量[J].光學(xué)精密工程,2009,17(5):1046?1050.
[3] 紀(jì)榮袆,趙長明,任學(xué)成.脈沖激光測距時刻鑒別方法的研究[J].紅外,2010,31(11):34?37.
[4] 張黎明,張毅,趙欣.基于TDC的激光測距傳感器飛行時間測量[J].傳感器與微系統(tǒng),2011,30(12):71?74.
[5] 楊成偉,陳千頌,林彥.脈沖激光測距時間間隔測量及誤差分析[J].紅外與激光工程,2003,32(2):132?136.
[6] HSIAO M J, HUANG J R, CHANG T Y. A built?in parametric timing measurement unit [J]. IEEE design and test of computers, 2004, 21(4): 322?330.
[7] 施智勇,潘曉聲,張謙.利用延時法進(jìn)行高精度脈沖激光測距[J].光學(xué)精密工程,2014,22(2):253?258.
[8] 仲峰,萬莉萍,岳宇軍.高精度時間測量芯片TDC?GP2在激光測距中的應(yīng)用[J].工業(yè)控制計算機(jī),2007,20(4):69?70.
[9] 岱欽,耿岳,李業(yè)秋,等.利用TDC?GP21的高精度激光脈沖飛行時間測量技術(shù)[J].紅外與激光工程,2013,42(7):1706?1709.
[10] 萬小強(qiáng).基于AD500型APD的激光測距硬件電路的研究[D].武漢:武漢理工大學(xué),2012.
