固定翼飛機軌跡穩(wěn)定性飛行仿真張
2017-03-27 16:59:02張喆尤俊彬
科技創(chuàng)新與應用 2017年7期
張喆+++尤俊彬


摘 要:針對固定翼飛機反區(qū)操縱帶來的飛行安全性問題,分析了產(chǎn)生反區(qū)操縱的原因,設計了一種飛行控制律,可使得飛機改變本體的軌跡穩(wěn)定性,仿真結果表明,在不同反饋增益的情況下,飛機軌跡穩(wěn)定性出現(xiàn)了較大的變化,可將原有的一級飛行品質(zhì)變?yōu)槎壓腿墶?/p>
關鍵詞:動力學建模;軌跡穩(wěn)定性;控制律設計;飛行仿真
1 概述
飛機著艦與在陸基機場著陸存在很大的區(qū)別,由于航空母艦不是一個固定的坐標,在海浪中它是處于六自由度的運動之中。另外由于允許著陸區(qū)域小得多,飛機的著艦點的精度對飛機的著艦安全影響很大,因此要求艦載機的著艦精度比常規(guī)陸基飛機要高得多。由于艦載機為了滿足在航空母艦上著艦要求,它的著陸速度一般要比陸基飛機小得多,因此飛機的軌跡穩(wěn)定性較差,現(xiàn)代戰(zhàn)斗機為了保證高速性能通常采用小展弦比的機翼,也使得它的低速軌跡穩(wěn)定性更差。較差的軌跡穩(wěn)定性,常常使得飛機處于反區(qū)操縱區(qū)間內(nèi),這種操縱方式往往使得飛行員處于不習慣狀態(tài),甚至引起墜機的事故,因此對飛機軌跡穩(wěn)定性的研究和模擬對試飛安全和飛機設計定型意義重大。
2 飛機反區(qū)操縱的成因
可用圖1所示說明反區(qū)操縱成因,圖中Vyl即為有利速度點Vopt,當飛行速度高于Vyl時,若飛機由高速平飛轉到低速平飛時(即速度減小ΔV1),則需增大迎角和減小可用推力,此時飛行員應同時后拉駕駛桿和油門桿;若飛機由低速平飛轉到高速平飛時,則需減小迎角和增大可用推力,此時飛行員應同時向前推駕駛桿和油門桿。這種操縱動作符合飛行員的操縱習慣,故稱大于Vopt的速度范圍為正操縱區(qū)。然而,在飛行速度小于Vopt時,操縱動作卻不同,同樣飛機由高速平飛轉到低速平飛時(即速度減小ΔV2),飛行員要拉桿以增加迎角,同時推油門桿以增加發(fā)動機的可用推力P,以達到與平飛需用推力Ppx相等,實現(xiàn)等速平飛;而飛機由低速轉到高速平飛時,則飛行員應前推駕駛桿和后拉駕駛桿。這種操縱動作和飛行員操縱習慣相反,故稱此平飛范圍為反操縱區(qū)。
3 低動壓下飛行軌跡穩(wěn)定性與反區(qū)操縱的關系
飛機在航母上進行起飛或著艦任務時,要進行上升或下滑操縱,在此飛行狀態(tài)往往處于低動壓情況下,和肯能使飛機進入反操縱區(qū)。在飛行反區(qū)操縱飛機時,往往與正區(qū)操縱習慣相反。
如圖2所示,為典型戰(zhàn)斗機飛機的上升極曲線,在正區(qū)操縱時,欲使飛機從原來的θ=5°的定常上升狀態(tài)C轉入以θ=10°的定常上升狀態(tài)E,那么飛行員后拉桿即可實現(xiàn)。在拉桿的最初瞬間,由于飛行速度尚來不及改變,故速度以D點表示。但由于D點落在減速區(qū),飛行速度回自動減小而趨于E點,并最終在該點建立起θ=10°的等速上升狀態(tài)。因此,在正區(qū)范圍內(nèi)控制上升航跡原則上只須移動一次駕駛桿就可完成。
在反區(qū)范圍內(nèi)改變飛行狀態(tài)就要復雜得多。例如,欲使飛機從原來θ=15°的點B定常上升狀態(tài)轉到以θ=20°的點A定常上升狀態(tài),若仍按照正區(qū)操縱方法,即后拉駕駛桿,則在后拉桿的最初瞬間,速度尚來不及改變而落在減速區(qū)的F點上,因而速度繼續(xù)減小,永遠不可能轉入速度較大的點A飛行狀態(tài)。所以,在反區(qū)范圍內(nèi),按正常操縱規(guī)律是不可能實現(xiàn)預想的飛行狀態(tài)的改變。為此應在點B先向前推桿使飛機轉入θ較小的加速區(qū)點G狀態(tài),然后讓飛機加速到對應于點A的速度(或稍大于A的速度),此時再后拉桿使飛機轉入θ=20°的點A定常上升狀態(tài),而這往往要反復調(diào)整駕駛桿才能實現(xiàn)。
在陸地機場執(zhí)行飛行任務時,即是包括起飛著陸任務在內(nèi),由于飛行速度較高,飛機都處于正區(qū)操縱,而由于航母起降的特殊性,飛行速度較低,飛機往往處于飛行反區(qū)。所以反區(qū)操縱的問題在艦載機試飛中特別值得關注。在飛行品質(zhì)規(guī)范要求中,往往以軌跡穩(wěn)定性來判定飛機在低速時的操縱特性。
根據(jù)8785-B有關的飛行軌跡穩(wěn)定性要求:飛行軌跡穩(wěn)定性是按照飛行軌跡角隨空速的變化來定義的,此時空勤人員不改變油門位置,空速只由于使用升降舵操縱而改變。對于著陸進場飛行階段,飛行軌跡角對空速的曲線在V0min處的局部斜率應為負值或小于下列數(shù)值的正值:
a.等級1:0.06度/里/小時
b.等級2:0.15度/里/小時
c.等級3:0.24度/里/小時
推力狀態(tài)應該是以V0min作正常進場下滑軌跡所要求的推力狀態(tài)。飛行軌跡角對空速的曲線在比V0min小5里/小時處的斜率,在正值方向應不大于0.05度/里/小時,如圖3表示:
4 不同軌跡穩(wěn)定性品質(zhì)的模擬控制律設計
由于相關的飛行品質(zhì)要求明確了飛機設計中的軌跡穩(wěn)定性要求,所以對要求中的3級品質(zhì)分別模擬,就對現(xiàn)役大部分飛機(包括軌跡穩(wěn)定性不好的飛機),和即將服役的艦載機的軌跡穩(wěn)定性進行模擬。
4.1 軌跡穩(wěn)定性關鍵參數(shù)分析
已知IFSTA飛機在高度500米,0.2馬赫數(shù)下的小擾動數(shù)據(jù)如下所示:
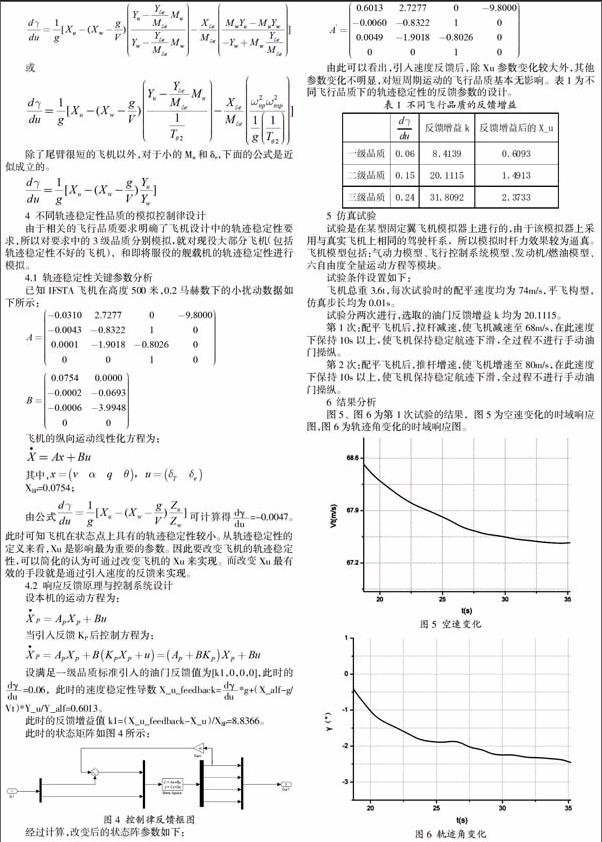
由此可以看出,引入速度反饋后,除Xu參數(shù)變化較大外,其他參數(shù)變化不明顯,對短周期運動的飛行品質(zhì)基本無影響。表1為不同飛行品質(zhì)下的軌跡穩(wěn)定性的反饋參數(shù)的設計。
5 仿真試驗
試驗是在某型固定翼飛機模擬器上進行的,由于該模擬器上采用與真實飛機上相同的駕駛桿系,所以模擬時桿力效果較為逼真。飛機模型包括:氣動力模型、飛行控制系統(tǒng)模型、發(fā)動機/燃油模型、六自由度全量運動方程等模塊。
試驗條件設置如下:
飛機總重3.6t,每次試驗時的配平速度均為74m/s,平飛構型,仿真步長均為0.01s。
試驗分兩次進行,選取的油門反饋增益k均為20.1115。
第1次:配平飛機后,拉桿減速,使飛機減速至68m/s,在此速度下保持10s以上,使飛機保持穩(wěn)定航跡下滑,全過程不進行手動油門操縱。
第2次:配平飛機后,推桿增速,使飛機增速至80m/s,在此速度下保持10s以上,使飛機保持穩(wěn)定航跡下滑,全過程不進行手動油門操縱。
6 結果分析
圖5、圖6為第1次試驗的結果,圖5為空速變化的時域響應圖,圖6為軌跡角變化的時域響應圖。
圖7、圖8為第二次試驗的結果。
當飛機具有好的軌跡穩(wěn)定性時(即負的軌跡穩(wěn)定性),在配平速度下,減速時,飛機軌跡爬升(即拉駕駛桿);增速時,飛機軌跡下降(即推駕駛桿)。從試驗情況可知,通過對加以響應反饋的控制律,可以使飛機呈現(xiàn)出正的軌跡穩(wěn)定性,拉桿后,飛機的航跡還在下降;推桿后,飛機的航跡在爬升,正是反區(qū)操縱時飛行所呈現(xiàn)出的特點。
7 結束語
通過給飛機油門桿加以反饋自動控制,可以改變飛機的軌跡穩(wěn)定性,使一架具有良好軌跡穩(wěn)定性的飛機變?yōu)榫哂熊壽E不穩(wěn)定的特性。通過這種控制律設計方法在飛行仿真上的應用,對于培訓飛行員有良好效果。特別是艦載機飛行員的培訓工作,可以讓飛行員在模擬器上就體會反區(qū)特性飛機的操縱響應特點,加深他們對反區(qū)操縱的印象。