基于危險指數(shù)最小化的機(jī)器人三次樣條安全軌跡規(guī)劃
2017-03-27 17:31:17彭愛泉楊明靖
科技創(chuàng)新與應(yīng)用 2017年7期
彭愛泉+楊明靖

摘 要:為使機(jī)器人在實時的運(yùn)行過程中不與人發(fā)生碰撞,文章提出了一種實現(xiàn)機(jī)器人安全性的方法,即基于危險指數(shù)最小化的機(jī)器人三次樣條安全軌跡規(guī)劃。該方法根據(jù)全局安全路徑規(guī)劃階段所獲得的安全路徑點(diǎn),采用三次樣條函數(shù)對其進(jìn)行插值,并通過實時評估獲得的危險指數(shù)來合理規(guī)劃機(jī)器人在各路段的運(yùn)行時間,最終以機(jī)器人危險指數(shù)最小化為目的規(guī)劃機(jī)器人運(yùn)行軌跡。仿真實驗表明,該方法可以沿著預(yù)定的路徑點(diǎn)生成平滑、安全有效的軌跡,確保了機(jī)器人工作空間中人的安全性。
關(guān)鍵詞:機(jī)器人安全性;危險指數(shù);三次樣條;軌跡規(guī)劃;人機(jī)共處
為了完成復(fù)雜作業(yè)任務(wù)、調(diào)試設(shè)備等,往往需要人與機(jī)器人零距離接觸。如何保障高速運(yùn)轉(zhuǎn)且剛度極大的機(jī)器人不會對人體造成傷害成為機(jī)器人研究領(lǐng)域的嚴(yán)峻挑戰(zhàn)[1-3]。合理規(guī)劃機(jī)器人的運(yùn)行軌跡是實現(xiàn)機(jī)器人安全性的一種有效策略[4-5]。針對人機(jī)共處環(huán)境的特點(diǎn),為了規(guī)劃機(jī)器人安全、有效的運(yùn)行軌跡,本文根據(jù)安全路徑規(guī)劃階段[6]所獲得的一系列安全路徑點(diǎn),采用三次樣條函數(shù)對這些路徑點(diǎn)進(jìn)行插值,并以機(jī)器人實時運(yùn)行過程中的危險指數(shù)[5]來規(guī)劃機(jī)器人的在各路徑段的運(yùn)行時間,從而實時調(diào)整機(jī)器人的位移、速度和加速度。
1 三次樣條時間最優(yōu)軌跡規(guī)劃
1.1 軌跡規(guī)劃的基本原理和方法
軌跡規(guī)劃是指根據(jù)機(jī)器人作業(yè)任務(wù)的要求,求取機(jī)器人的位移、速度和加速度。軌跡規(guī)劃方法主要有三次多項式軌跡規(guī)劃、三次樣條軌跡規(guī)劃、五次多項式軌跡規(guī)劃、拋物線過渡的線性運(yùn)動軌跡規(guī)劃、具有中間點(diǎn)及用拋物線過渡的線性運(yùn)動軌跡規(guī)劃以及高次多項式運(yùn)動軌跡規(guī)劃等[7]。其中,三次樣條插值函數(shù)[8]不僅具有連續(xù)的一階導(dǎo)數(shù),還具有連續(xù)的二階導(dǎo)數(shù),因此,對于自由度較少(小于6)且結(jié)構(gòu)較簡單的機(jī)器人來說,采用三次樣條函數(shù)進(jìn)行軌跡規(guī)劃可以保證機(jī)器人在工作過程中位移、速度和加速度連續(xù),實現(xiàn)平穩(wěn)控制。由于本文研究的多關(guān)節(jié)機(jī)械手(同文獻(xiàn)[5])自由度較少,因而選取三次樣條函數(shù)規(guī)劃機(jī)器人的軌跡。
由于全局路徑規(guī)劃階段[6]所獲得的一系列路徑點(diǎn)是機(jī)器人整個自由位姿空間中最安全的位姿點(diǎn),因此在實時軌跡規(guī)劃階段,機(jī)器人應(yīng)盡量沿著這些安全路徑點(diǎn)運(yùn)行,這就要求軌跡規(guī)劃的插值函數(shù)必須滿足這些路徑點(diǎn)的約束條件。
1.2 三次樣條函數(shù)軌跡規(guī)劃
1.3 時間最優(yōu)安全軌跡規(guī)劃
由上述分析可知,機(jī)器人在各路徑段的運(yùn)行時間決定了機(jī)器人運(yùn)行的位移、速度和加速度。因此,為了保證機(jī)器人工作空間中人的安全性以及工作的效率,必須合理規(guī)劃機(jī)器人的運(yùn)行時間。
首先必須確保機(jī)器人不會碰撞人,因此將危險指數(shù)作為時間規(guī)劃因子,即機(jī)器人根據(jù)危險指數(shù)(計算方法同文獻(xiàn)[5]中實時運(yùn)動規(guī)劃階段的危險指數(shù)的計算)的大小實時調(diào)整運(yùn)行的時間。本文采用文獻(xiàn)[5]中安全時間規(guī)劃因子λ來設(shè)置機(jī)器人在各路徑段的運(yùn)行時間dTi,j,即:
因此,上述時間最優(yōu)安全軌跡規(guī)劃方法在滿足機(jī)器人關(guān)節(jié)空間速度、加速度上下限約束條件以及工作空間位置精度約束條件時,還能沿著預(yù)定的路徑生成一條非常精準(zhǔn)的軌跡。
2 仿真試驗
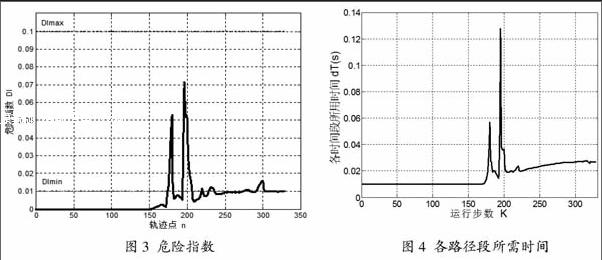
為了進(jìn)一步分析本文提出的軌跡規(guī)劃方法對機(jī)器人安全性的貢獻(xiàn),本文通過文獻(xiàn)[5]的仿真實驗平臺來驗證基于危險指數(shù)最小化的機(jī)器人三次樣條安全軌跡規(guī)劃的有效性。設(shè)機(jī)械手末端執(zhí)行器的起點(diǎn)位置為Ps=(0,0.415,1.065),終點(diǎn)位置為pg=(0.271,-0.989,-0.307),人位于Ph=(0,-0.5,-0.917)靜止不動。仿真的結(jié)果如圖1至圖4所示。
圖1、圖2可以看到,基于危險指數(shù)最小化的機(jī)器人三次樣條時間最優(yōu)軌跡規(guī)劃方法都可以沿著預(yù)定的路徑點(diǎn)生成一條連續(xù)、平滑的軌跡,因此本文的軌跡規(guī)劃方法不僅能夠控制機(jī)器人的平穩(wěn)運(yùn)動,還能夠控制其達(dá)到一定位置精度的要求。從圖3可以看到機(jī)器人的整個運(yùn)行過程中,危險指數(shù)均小于最大安全允許閾值DImax以下,因此確保了機(jī)器人的安全性。從圖4可以看出在各個路徑段,機(jī)器人會根據(jù)危險指數(shù)的大小實時調(diào)整運(yùn)行所需的時間。因此,基于危險指數(shù)最小化的機(jī)器人三次樣條安全軌跡規(guī)劃方法是一種實現(xiàn)機(jī)器人安全性的有效策略。
3 結(jié)束語
為了實時規(guī)劃人機(jī)共處環(huán)境中機(jī)器人的安全有效運(yùn)行軌跡,本文提出了一種基于危險指數(shù)最小化的機(jī)器人三次樣條安全軌跡規(guī)劃策略。仿真結(jié)果表明該策略是有效可行的。
參考文獻(xiàn)
[1]P. I. Corke. Safety of advanced robots in human environments[J]. Discussion paper for IARP,1999.
[2]C. W. Lee, Z. Bien, G. Giralt, et al. Technical Challenge for Dependable Robots in Human Environments[R]. Report on the First IART/IEEE-RAS Joint Workshop,2001.
[3]吳海彬,楊劍鳴.機(jī)器人在人機(jī)交互過程中的安全性研究進(jìn)展[J].中國安全科學(xué)學(xué)報,2011,21(11).
[4]LACEVIC B,ROCCO P. Towards a complete safe path planning for robotic manipulators[C]//IEEE/RSJ International Conference on Intelligent Robots and Systems,Taipei,China,2010:5366-5371.
[5]吳海彬,彭愛泉,何素梅.基于危險指數(shù)最小化的機(jī)器人安全運(yùn)動規(guī)劃[J].機(jī)械工程學(xué)報,2015,51(9):18-27.
[6]彭愛泉.基于危險指數(shù)最小化的機(jī)器人安全路徑規(guī)劃[J].現(xiàn)代機(jī)械,2014,4:1-12.
[7]Saeed B. Niku. Introduction to Robotics Analysis, Applications(孔富春,朱紀(jì)紅,劉國棟,等)[M].北京:電子工業(yè)出版社,2004:137-152.
[8]J. H. Ahlberg, EN. Niloon, J. L. Waloh. The Theory of Splinc and Their Applieations. London: Academic Press INC,1967:9-74.
作者簡介:彭愛泉(1985-),女,講師。
楊明靖(1989-),男,助教。