網絡控制智能家庭安全機器人
2017-03-27 13:35:14陳志遠齊愛學李春輝高志偉王學慧
科技創新與應用 2017年4期
陳志遠+齊愛學+李春輝+高志偉+王學慧+李世輝+李麗麗
摘 要:機器人以無線WIFI和安卓及電腦上位機為核心,WIFI模塊通過連接到家庭路由,與外網建立聯系,然后通過路由“端口映射”,達到利用網絡“遠程控制”的目的。同時,機器人配有攝像頭,GSM,火焰、氣體傳感器等模塊,智能檢測和采集家庭環境信息,當有異常發生時,可以通過GSM給主人發短信,然后主人可以通過網絡及時檢測家庭狀況,實現了遠程控制,即無論你處于世界任何一個角落,只要有網絡,你都可以看到家庭中的當前信息,并實現對小車的控制。此外,小車還可以實現遠程/近程澆花,遠程/近程控制家庭點燈,熱水器,電視機,窗簾等家電。讓生活變得更加方便、智能、美好。
關鍵詞:WIFI;上位機;傳感器;GSM模塊;攝像頭
家庭安全機器人是機器人研究中的一個新興發展領域,其屬于危險作業機器人中的一個分支,具備了危險作業機器人的所有特點。其往往具備多功能作用,可以在救火現場自由行駛、傳遞信號,并能自動向被困者提供食品物資,為救災救火工作做出巨大的貢獻。
目前,一般的家庭安全裝置只能簡單的檢測火焰和防盜,而且存在誤報率高,精準度低等缺陷,因而限制了其推廣使用。由于家庭安全越來越受到關注,提高探測的可靠性和排除安全隱患成為當今時代的主題,而本裝置就利用傳感器和GSM模塊,攝像頭模塊,WIFI模塊,手機上位機實現遠程無線控制機器人排除家庭安全隱患。極大地提高了家庭的安全性。
1 總體設計
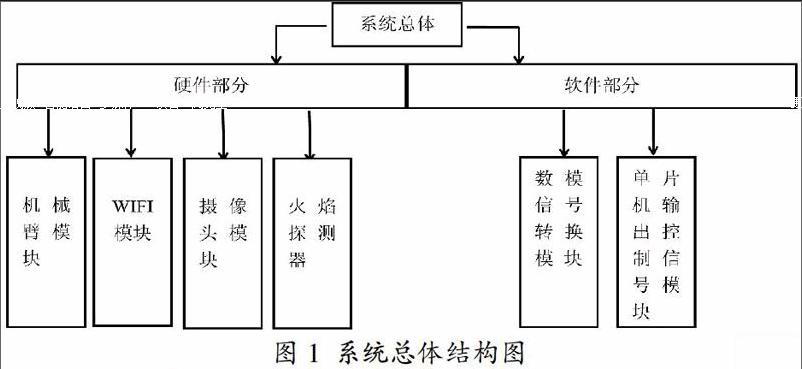
本設計以無線WIFI和安卓及電腦上位機為核心,WIFI模塊通過連接到家庭路由,與外網建立聯系,然后通過路由“端口映射”,達到利用網絡“遠程控制”的目的。同時,機器人配有攝像頭,GSM,火焰、氣體傳感器等模塊,智能檢測和采集家庭環境信息,當有異常發生時,可以通過GSM給主人發短信,然后主人可以通過網絡及時檢測家庭狀況。系統總體框架圖如圖1所示。
2 系統硬件設計
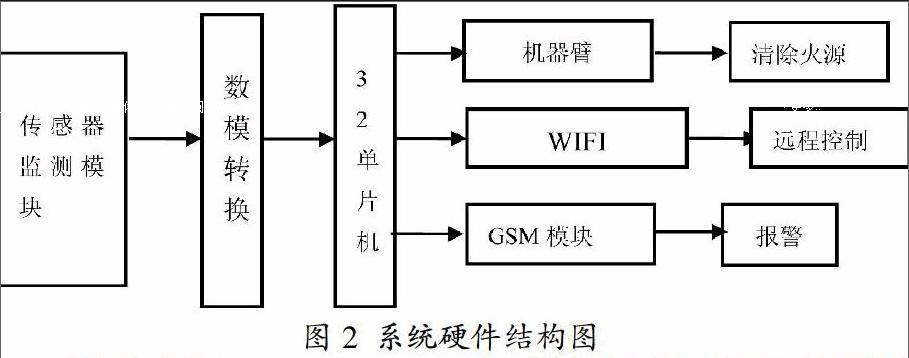
該系統結構圖如圖2所示,該系統以stm32f103z8t6單片機為主芯片,外接火焰傳感器模塊、攝像頭模塊、機器臂模塊、GSM模塊等。通過各個模塊檢測外界環境將采集的信號送到A/D模數轉換器電路,然后將數字信號傳送給單片機進行處理,進而單片機控制各個模塊進行工作。當有異常發生時,可以通過GSM給主人發短信,然后主人可以通過網絡及時檢測家庭狀況。
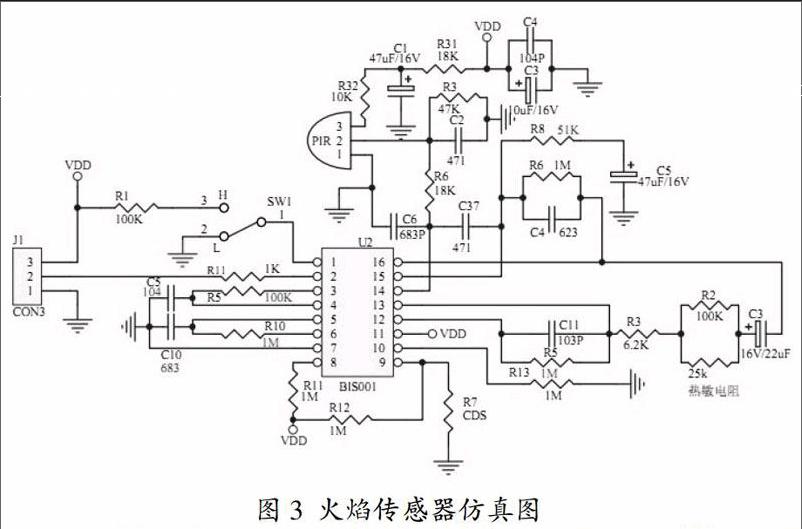
火焰傳感器(flame transducer)是機器人專門用來搜尋火源的傳感器,當然火焰傳感器也可以用來檢測光線的亮度,只是本傳感器對火焰特別靈敏。火焰傳感器利用紅外線對對火焰非常敏感的特點,使用特制的紅外線接受管來檢測火焰,然后把火焰的亮度轉化為高低變化的電平信號,輸入到中央處理器中,中央處理器根據信號的變化做出相應的程序處理。
A/D轉換電路[3]是將各個傳感器檢測電路采集的模擬量轉換成數字信號供單片機處理。從而實現各個傳感器電路與單片機的信息傳送與狀態反饋,進而輔助單片機發送動作指令。A/D轉換電路仿真圖如圖4所示。
STM32F1系列屬于中低端的32位ARM微控制器,該系列芯片是意法半導體(ST)公司出品,其內核是Cortex-M3。
該系列芯片按片內Flash的大小可分為三大類:小容量(16K和32K)、中容量(64K和128K)、大容量(256K、384K和512K)。
芯片集成定時器,CAN,ADC,SPI,I2C,USB,UART,等多種功能。
3 系統軟件設計
該系統的軟件采用Keil軟件編程,以無線WIFI和安卓及電腦上位機為核心,WIFI模塊通過連接到家庭路由,與外網建立聯系,然后通過路由“端口映射”,達到利用網絡“遠程控制”的目的。進而實現相應的功能。系統軟件設計的結構圖如圖5所示。
WIFI模塊通過連接到家庭路由,與外網建立聯系,然后通過路由“端口映射”,進而達到利用網絡“遠程控制”小車的目的。GSM模塊與各傳感器之間的配合。各傳感器通過檢測到煙霧或火焰,把信息傳遞給單片機,單片機再控制GSM發送不同的報警短信。軟件硬件WIFI模塊主要用來實現該系統軟件與硬件之間的通信功能,軟件設計的流程如下:開始-檢測器-數據采集成功-AD信號轉換-單片機輸出控制模塊-攝像頭尋找火源,小車出發-找到火源并搬離-測試結束-退出程序。
4 實驗結果
機器人以無線WIFI和安卓及電腦上位機為核心,WIFI模塊通過連接到家庭路由,與外網建立聯系,然后通過路由“端口映射”,達到利用網絡“遠程控制”的目的。同時,機器人配有攝像頭,GSM,火焰、氣體傳感器等模塊,智能檢測和采集家庭環境信息,打破了常規智能車控制距離短的限制,小車上的WIFI模塊與家庭路由相連接,此時,路由器就相當于一個“橋”,實現了小車與Internet的連接。達到與我們自主開發的Android和Windows上位機數據交換的目的。即實現遠程控制和攝像頭信息的采集。
5 實驗應用
該機器人裝置包括火焰傳感器、煙霧檢測、尋找火源和遠程控制的四種功能,通過無線傳輸攝像頭采集路面信息,并把路面信息傳給上位機,之后我們可以通過攝像頭發回的信息方便地在上位機上操作控制機器人,使其能夠安穩的轉彎前行。其次,到達指定位置后,攝像頭在大范圍內掃描確定需要處理的位置,在此同時傳感器開始工作,與攝像頭共同工作找到精確的火源位置確定角度并發回指令,而且在外來人員進入無人家庭時,也會向主人發送短信實現報警。它具有智能化,易于攜帶,成本低,利于推廣等優點。
6 結束語
目前,一般的家庭安全裝置只能簡單的檢測火焰和防盜,而且存在誤報率高,精準度低等缺陷,因而限制了其推廣使用。由于家庭安全越來越受到關注,提高探測的可靠性和排除安全隱患成為當今時代的主題,而本裝置就利用傳感器和GSM模塊,攝像頭模塊,WIFI模塊,手機上位機實現遠程無線控制機器人排除家庭安全隱患。極大地提高了家庭的安全性。
參考文獻
[1]李磊,葉濤,譚民.移動機器人技術研究現狀與未來[J].2002.
[2]陸新華,張桂林.室內服務機器人導航方法研究[J].2003.
[3]田國會,李曉磊,趙守鵬.家庭服務機器人智能空間技術研究與進展[J].機器人,2007,25(5):470-474.