一種基于氣動力模型的高超聲速滑翔目標(biāo)跟蹤算法
2017-03-27 06:16:37熊家軍韓春耀蘭旭輝
宇航學(xué)報 2017年2期
關(guān)鍵詞:模型
張 凱,熊家軍,韓春耀,蘭旭輝
(1.空軍預(yù)警學(xué)院研究生管理大隊,武漢430019;2.空軍預(yù)警學(xué)院四系,武漢430019)
ZHANG Kai1,XIONG Jia-jun2,HAN Chun-yao1,LAN Xu-hui2
(1.Department of Graduation Management,Air Force Early Warning Academy,Wuhan 430019,China; 2.No.4 Department,Air Force Early Warning Academy,Wuhan 430019,China)
一種基于氣動力模型的高超聲速滑翔目標(biāo)跟蹤算法
張 凱1,熊家軍2,韓春耀1,蘭旭輝2
(1.空軍預(yù)警學(xué)院研究生管理大隊,武漢430019;2.空軍預(yù)警學(xué)院四系,武漢430019)
針對傳統(tǒng)跟蹤方法對高超聲速滑翔目標(biāo)(HGRV)進行狀態(tài)估計時存在較大誤差的問題,提出一種基于氣動力模型的目標(biāo)跟蹤算法。首先在彈道坐標(biāo)系(VTC)中推導(dǎo)了目標(biāo)氣動加加速度模型,分析模型各分量對目標(biāo)運動狀態(tài)的影響。分別對縱向和橫向機動模型進行了研究,得出橫向機動是跟蹤的主要難點的結(jié)論。然后對傳統(tǒng)氣動力模型進行改進,將轉(zhuǎn)彎力參數(shù)與爬升力參數(shù)之間存在的先驗信息引入高階狀態(tài)向量。同時,考慮不同飛行模式下機動頻率的變化,構(gòu)建基于氣動力模型的交互多模型(IMM)算法。仿真表明,所提算法精度顯著優(yōu)于針對該類目標(biāo)的其他跟蹤算法,特別是當(dāng)目標(biāo)發(fā)生機動時,該算法具有更強的適應(yīng)性和魯棒性。
高超聲速飛行器;機動目標(biāo)跟蹤;氣動力模型;擴展卡爾曼濾波 (EKF);交互多模型
0 引 言
HGRV是指以5~25馬赫的速度實現(xiàn)跨大氣層滑翔的再入飛行器,具有高速高機動性、大航程、高精度等優(yōu)點,可實施遠(yuǎn)距離機動快速打擊,是瓦解敵方導(dǎo)彈防御系統(tǒng)、實現(xiàn)常規(guī)快速全球打擊的新型武器裝備,這給我國空天安全帶來了巨大挑戰(zhàn)[1-2]。為此,研究面向HGRV的跟蹤方法具有重要意義。
面對HGRV機動能力復(fù)雜、動力學(xué)方程高度非線性的問題,構(gòu)建較好的目標(biāo)狀態(tài)模型從而提高目標(biāo)狀態(tài)信息提取的精度是亟需解決的問題。目前國內(nèi)外關(guān)于再入目標(biāo)跟蹤的文獻主要集中于航天飛機和彈道導(dǎo)彈的相關(guān)需求,而針對HGRV跟蹤的文獻相對鮮見。通常來講,對再入目標(biāo)的高階狀態(tài)進行合理建模,可以改善目標(biāo)狀態(tài)的估計精度。按照目標(biāo)狀態(tài)模型構(gòu)建思路的不同,針對再入目標(biāo)的跟蹤算法發(fā)展大體遵循兩條路線:1)運動學(xué)模型狀態(tài)估計。該方法利用面向低空目標(biāo)的勻速(Constant velocity,CV)、勻加速(Constant acceleration,CA)、勻速轉(zhuǎn)彎(Constant turn,CT)以及Singer等模型進行改進,組成IMM算法對飛行器進行跟蹤[3-6]。其實質(zhì)是分析運動學(xué)特征的基礎(chǔ)上對目標(biāo)的未知機動建模。該方法具有較快的機動響應(yīng)能力,但加速度估計精度有限;2)動力學(xué)模型狀態(tài)估計。該方法通過對目標(biāo)進行動力學(xué)建模,合理設(shè)計氣動參數(shù),利用擴維后的動力學(xué)模型進行狀態(tài)估計[7-9]。其實質(zhì)是對飛行器的未知氣動力進行建模。該方法的優(yōu)點是穩(wěn)定跟蹤時估計精度高,但需要較多的先驗信息。同時,當(dāng)氣動力變化較快或模型不夠準(zhǔn)確時,跟蹤能力會大幅下降。
分析上述兩類目標(biāo)狀態(tài)模型,可知針對HGRV構(gòu)建更加精確的狀態(tài)模型、提高模型對不同運動狀態(tài)的適應(yīng)性是實現(xiàn)精確穩(wěn)定跟蹤的關(guān)鍵。為此,本文首先對目標(biāo)加加速度模型進行分析,論證對氣動加速度建模的必要性,然后分別對縱向和橫向機動能力進行研究。在此基礎(chǔ)上,將爬升力參數(shù)與側(cè)向力系數(shù)之間存在的先驗信息引入動力學(xué)狀態(tài)模型的高階狀態(tài)向量。同時,考慮不同飛行模式下機動頻率的變化,構(gòu)建基于氣動力模型的IMM跟蹤算法,以期有助于解決HGRV精確穩(wěn)定跟蹤的困難。
1 動力學(xué)特性分析
1.1 問題提出
定義雷達站坐標(biāo)系為東北天(East-north-up,ENU)坐標(biāo)系,可以用矢量形式描述HGRV受到加速度的表達式為[10]
式中:r表示飛行器的地心距矢量,a表示氣動加速度,g表示重力加速度,ωe為地球自轉(zhuǎn)角速度,-ωe×(ωe×r)表示由慣性離心力引起的牽連加速度,-2ωe×表示科氏加速度。
據(jù)式(1)可知,氣動加速度a是影響目標(biāo)機動的主要原因。為簡化描述困難,通常將a在VTC坐標(biāo)系中分解,可將a表示為[9]
式中:
式中:uv、ut和uc分別為VTC坐標(biāo)系中各坐標(biāo)軸單位矢量,D為阻力加速度,L為升力加速度,ρ為大氣密度,v為速度,S為目標(biāo)等效截面積;α和φ分別為攻角和滾轉(zhuǎn)角,是控制變量;CD(α)、CL(α)分別為阻力系數(shù)和升力系數(shù),是攻角α的函數(shù)。
氣動加速度a的變化導(dǎo)致目標(biāo)發(fā)生機動,分析其導(dǎo)數(shù)項a·對運動狀態(tài)的影響有助于理解目標(biāo)機動的本質(zhì)[11]。結(jié)合式(1),忽略牽連加速度和科氏加速度的影響,對式(2)求導(dǎo),則有
式中:
Ⅲ項由D變化引起,該項位于平面Γ內(nèi),對質(zhì)心運動產(chǎn)生影響;
Ⅳ項由L和φ變化引起,該項垂直于平面Γ,對繞質(zhì)心運動產(chǎn)生影響。
1.2 機動能力分析
1.2.1 縱向機動能力分析
HGRV再入主要分為平衡滑翔和跳躍滑翔兩種形式,這里重點對跳躍滑翔進行分析。首先在VTC坐標(biāo)系中建立簡化的縱向俯仰模型[10]:
式中:θ為彈道傾角,v為飛行速度。
跳躍滑翔過程中θ一般較小,當(dāng)θ<0時,目標(biāo)處于俯沖段;當(dāng)θ>0時,目標(biāo)處于拉升段。據(jù)式(6)可知,縱向平面內(nèi)航跡跳躍的原因是由于受力不平衡,從而使得θ不斷變化,導(dǎo)致HGRV高度反復(fù)升降。隨著再入過程推進,HGRV速度的減小,目標(biāo)能量降低,航跡跳躍幅度逐漸減小,趨于平緩。可見,縱向跳躍更多是對目標(biāo)再入過程中縱向彈道特性的體現(xiàn)。
臨近空間位于海拔20~100 km范圍內(nèi),相關(guān)文獻仿真結(jié)果表明[13-14],HGRV每次跳躍幅度Δr一般不超過30 km,而每次跳躍對應(yīng)的航程ΔR則有數(shù)百公里。這意味著在目標(biāo)數(shù)千公里的再入過程中,相對于航程而言,高度方向的跳躍機動并不明顯。同時,由于動力和氣動熱方面的限制,目標(biāo)也不可能有大范圍的高度調(diào)整。
1.2.2 橫向機動能力分析
在VTC坐標(biāo)系中建立簡化的橫向轉(zhuǎn)彎模型[10]:
式中:σ為彈道偏角。認(rèn)為cosθ≈1,可推導(dǎo)橫向轉(zhuǎn)彎曲率半徑l公式為:
據(jù)式(8)可知,曲率半徑l的主要影響因素為飛行器當(dāng)前速度v和滾轉(zhuǎn)角φ,由于滾轉(zhuǎn)角φ突變性較強,瞬時l的取值主要依賴φ的變化。一般認(rèn)為,曲率半徑l減小,則航跡突變性增強;速度v增大,則目標(biāo)機動性增強。再入初期HGRV速度快,但曲率半徑l較大,雖然此時航跡突變性能較弱,但由于v較快,其橫向機動能力仍然很強;再入后期速度降低,l變小,則航跡突變性增強。據(jù)文獻[15]估算此類目標(biāo)瞬時曲率半徑約為200~2000 km,但由于速度快,橫向機動能力仍然可達數(shù)千公里。
綜上所述,HGRV縱向跳躍能力有限。同時,由于目標(biāo)速度快,φ調(diào)整范圍大,HGRV橫向機動能力較強。因此,跟蹤HGRV的難點并不是再入過程中縱向平面內(nèi)所體現(xiàn)的跳躍特性,而是在高超聲速條件下,強大的橫向機動能力造成的目標(biāo)機動。與之對應(yīng),應(yīng)進行以下研究:1)目標(biāo)縱向跳躍機動幅度有限,飛行特征較為規(guī)律,可建立合理的動力學(xué)模型,提高縱向跟蹤精度并兼顧運算效率;2)為實現(xiàn)對目標(biāo)橫向機動的有效跟蹤,應(yīng)采用更為有效的機動目標(biāo)跟蹤算法。
2 跟蹤算法研究
2.1 氣動力模型
據(jù)上文分析,氣動加速度a的變化決定了飛行器的運動狀態(tài),且目標(biāo)縱向跳躍幅度有限。因此,利用氣動加速度a構(gòu)建動力學(xué)狀態(tài)模型有助于對縱向跳躍實現(xiàn)穩(wěn)定跟蹤。而建立氣動力模型的困難,則集中在對氣動加速度a建模上。
在式(2)的基礎(chǔ)上,參照文獻[8]在ENU坐標(biāo)系中建立氣動加速度a模型:
據(jù)式(10)可知CL(α)與氣動參數(shù)存在的關(guān)系。攻角α頻繁且幅值較大的調(diào)整,會導(dǎo)致飛行器氣動變化更加復(fù)雜、氣動熱急劇上升,通常滑翔過程中α為常值或變化較小[16]。相關(guān)研究表明氣動系數(shù)隨攻角變化較為平緩[17-18],可認(rèn)為短時間內(nèi)氣動系數(shù)變化較小。這就意味著再入過程中的大小變化相對穩(wěn)定,即αt和αc存在負(fù)相關(guān)的關(guān)系。因此,本文將先驗信息作為約束條件引入氣動力模型中,從而提高跟蹤精度。同時,為簡化公式,利用滾轉(zhuǎn)角φ對應(yīng)的正弦值k表征φ的變化,將氣動參數(shù)改為
式中:αD為阻力參數(shù),αL為升力參數(shù),k為滾轉(zhuǎn)角參數(shù)。聯(lián)立式(9)~(11),可得改進后的模型為
2.2 EKF濾波器
提高跟蹤目標(biāo)估計精度的關(guān)鍵是快速準(zhǔn)確地估計出氣動參數(shù)。為保證一定的跟蹤精度的前提下,避免濾波發(fā)散,應(yīng)根據(jù)飛行特征合理調(diào)整狀態(tài)噪聲[19]。據(jù)上文可認(rèn)為短時間內(nèi)氣動系數(shù)變化較小,則αD和αL的機動特性可采用高斯-維納模型;作為目標(biāo)主要的控制變量滾轉(zhuǎn)角φ對應(yīng)的參數(shù)k則決定了 αL在轉(zhuǎn)彎和爬升方向的分量 - αLk和的大小,由于φ調(diào)整頻繁,可采用一階馬爾科夫模型表示k的機動特性。
至此,基于氣動力模型的目標(biāo)狀態(tài)向量可表述為:將改進的氣動參數(shù)[αD,αL,k]T增廣到目標(biāo)狀態(tài)向量中,使目標(biāo)狀態(tài)向量變?yōu)閄=[x,y,z,vx,vy,vz,αD,αL,k]T。則目標(biāo)的狀態(tài)方程=f(X)+w可表達為
式中:r為目標(biāo)瞬時地心距,B為雷達站地理緯度,Re為地球半徑。wD、wL和wk分別為氣動參數(shù)αD、αL和k的零均值高斯白噪聲,λ為參數(shù)k對應(yīng)的機動頻率。
文獻[20]認(rèn)為混合坐標(biāo)系跟蹤結(jié)果更加簡單,誤差更小,故濾波算法采用混合坐標(biāo)系下的EKF濾波器,即在ENU坐標(biāo)系中建立狀態(tài)方程,在球坐標(biāo)系中建立量測方程。對狀態(tài)式(13)進行離散化:
式中:△t為采樣間隔,F(xiàn)(Xk|k)是f(Xk|k,tk)相對于Xk|k的雅克比矩陣。
2.3 交互多模型
HGRV橫向機動的目的是根據(jù)指令完成戰(zhàn)術(shù)動作,不同戰(zhàn)術(shù)要求對應(yīng)的機動幅度也不盡相同。機動頻率λ的大小則表征了控制變量滾轉(zhuǎn)角對應(yīng)的參數(shù)k序列相關(guān)性的強弱,其取值直接影響了目標(biāo)機動時的跟蹤精度[21]。對于穩(wěn)態(tài)飛行的目標(biāo)而言,通常λ≈10-4s-1可表征其緩變特性,也就意味著參數(shù)k幾乎不變,稱之穩(wěn)態(tài)。當(dāng)目標(biāo)發(fā)生橫向機動時,參數(shù)k瞬時變化較大,通常λ≈(0.1~1)s-1可表征目標(biāo)機動,稱之機動態(tài)。同時,在飛行過程中機動模式可能介于穩(wěn)態(tài)和機動態(tài)下任意中間模式。
針對該類目標(biāo)橫向機動性能較強的特點,當(dāng)前一般認(rèn)為IMM是解決機動目標(biāo)跟蹤的有效途徑。為此,本文利用多機動頻率λ的IMM模型以提高跟蹤精度。為滿足機動模式的覆蓋要求,對機動頻率 λ參數(shù)范圍進行適當(dāng)擴大。如圖3所示,設(shè)計的 IMM模型由設(shè)置 r個不同機動頻率λi(i=1,2,…,r)的EKF濾波器組成。同時,為進一步提高跟蹤精度,對各模型新息進行濾波,應(yīng)用新息濾波方程[22]:
3 仿真分析
假定雷達采樣間隔為0.1 s,距離量測標(biāo)準(zhǔn)差為100 m,方位角、俯仰角量測標(biāo)準(zhǔn)差為2×10-3rad,目標(biāo)與雷達之間的初始仿真距離為560 km。
參考美國洛馬公司的CAV-H為仿真實例模型的基本參數(shù)[23]。假設(shè)以下仿真場景:航跡一為目標(biāo)無機動的平穩(wěn)滑翔航跡;航跡二為機動滑翔航跡,如表1所示為航跡二中不同機動狀態(tài)下對應(yīng)的控制變量取值。為闡述仿真航跡的機動情況,將仿真航跡映射到ENU坐標(biāo)系的三個平面內(nèi),得到對應(yīng)方向的機動狀態(tài)變化趨勢,仿真航跡如圖3所示。
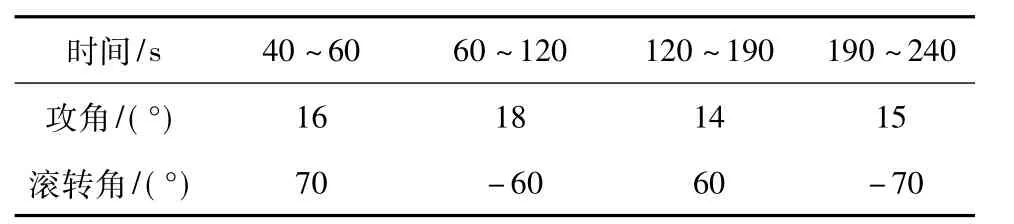
表1 控制變量取值Table 1 Value of control parameters
為檢驗本文所述跟蹤算法的有效性,分別采用四種跟蹤算法對再入航跡進行狀態(tài)估計:1)基于文獻[7]中所提氣動力模型算法,擴維氣動參數(shù)為[-αv,αt,αc]T;2)基于本文所提改進的氣動力模型算法,擴維氣動參數(shù)為[αD,αL,k]T,機動頻率λ為0.01 s-1;3)基于CA、CV和Singer模型的IMM算法;4)基于本文所提氣動力模型的IMM算法,r取值為3,對應(yīng)的機動頻率取值分別為0.0001 s-1、0.01 s-1、0.5 s-1。為保證仿真的真實可靠,上述算法均采用相同的噪聲和混合坐標(biāo)系,分別對航跡一和航跡二進行50次Monte Carlo狀態(tài)估計仿真,得到對應(yīng)的目標(biāo)狀態(tài)均方根誤差(RMSE)效果圖。
3.1 不同算法對平穩(wěn)滑翔航跡的跟蹤
從圖4中不難發(fā)現(xiàn):1)算法一狀態(tài)RMSE最大,狀態(tài)估計精度最低,且目標(biāo)離雷達較遠(yuǎn)時狀態(tài)估計精度顯著下降,可見算法一對探測距離較為敏感;2)算法二的狀態(tài)估計精度明顯優(yōu)于算法一,說明改進氣動力模型能夠提供更多有效信息;3)算法三和算法四跟蹤精度近似,且優(yōu)于其它兩種算法。說明IMM能夠有效提高狀態(tài)估計精度,且對于平穩(wěn)滑翔航跡而言,算法四相對算法三并不存在優(yōu)勢。
3.2 不同算法對機動滑翔航跡的跟蹤
結(jié)合表1數(shù)據(jù),從圖5可以看出:1)算法一和算法三對控制變量的突變較為敏感,其位置和速度RMSE隨目標(biāo)機動顯著增大。算法二和算法四能夠有效降低控制變量突變時狀態(tài)估計對跟蹤誤差的敏感性。可見采用改進氣動力模型的算法在目標(biāo)機動時表現(xiàn)出較好的性能;2)對比算法二和算法四,后者狀態(tài)估計精度有明顯提高。說明對于機動滑翔軌跡而言,IMM能夠有效提高狀態(tài)估計精度。
為進一步定量的分析四種算法的狀態(tài)估計精度,對兩個仿真實驗的狀態(tài)RMSE做統(tǒng)計平均,可得表2所示的平均誤差數(shù)據(jù)。
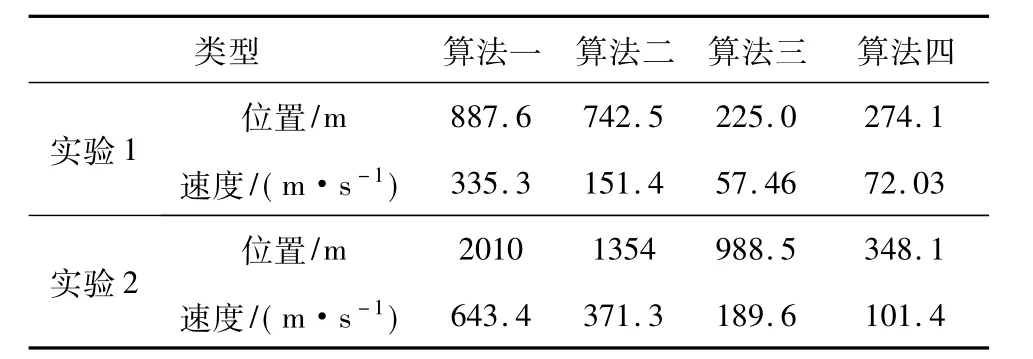
表2 狀態(tài)估計誤差性能比較Table 2 Performance comparison of state estimate errors
從表2中不難發(fā)現(xiàn):1)算法二比算法一位置估計精度平均提高了約15~30%,速度估計精度提高了約50%;2)算法四比算法二距離估計精度平均提高了約50~70%,速度估計精度提高了約50%; 3)對比算法三和算法四,跟蹤平穩(wěn)滑翔航跡時,兩算法狀態(tài)估計精度差別不大;跟蹤機動滑翔航跡時,算法四相對算法三狀態(tài)估計精度平均提高了約50%。
綜上所述,基于改進氣動力模型的IMM跟蹤算法能夠有效降低目標(biāo)機動時狀態(tài)RMSE值,其狀態(tài)估計精度顯著優(yōu)于其他三種算法。
4 結(jié) 論
本文研究了HGRV氣動加速度模型各項對目標(biāo)運動的影響,對目標(biāo)縱向和橫向機動能力進行了分析。利用轉(zhuǎn)彎力參數(shù)與爬升力參數(shù)之間存在的先驗知識,對傳統(tǒng)氣動力模型進行了合理改進,構(gòu)建基于改進氣動力模型的IMM跟蹤算法。
仿真對比表明,本文所提算法在距離和速度估計上,均具有較高的精度。尤其是目標(biāo)機動時,具有更強的適應(yīng)性和魯棒性。由于仿真中機動航跡采用常值分段函數(shù)的控制變量,下一步研究將致力于解決控制變量持續(xù)變化時的目標(biāo)高精度跟蹤問題。
[1] Paul L M,Vincent L R,Luat T N,et al.NASA hypersonic fight demonstration overview,status,and future plans[J].Acta Astronautica,2004,55(7):619-630.
[2] 李益翔.美國高超聲速飛行器發(fā)展歷程研究[D].哈爾濱:哈爾濱 工業(yè)大學(xué),2016.[LiYi-xiang.Researchonthe development history of US hypersonic aircrafts[D].Harbin: Harbin Institute of Technology,2016.]
[3] Li X R,Jilkov V P.Survey of maneuvering target tracking.Part I:dynamic models[J].IEEE Transactions on Aerospace and Electronic Systems,2003,39(4):1333-1364.
[4] 秦雷,李君龍,周荻.基于交互式多模型算法跟蹤臨近空間目標(biāo)[J].系統(tǒng)工程與電子技術(shù),2014,36(7):1243-1249.[Qin Lei,Li Jun-long,Zhou Di.Tracking for near space target based on IMM algorithm [J].SystemsEngineeringand Electronics,2014,36(7):1243-1249.]
[5] 張翔宇,王國宏,李俊杰,等.臨近空間高超聲速滑躍式軌跡目標(biāo)跟蹤技術(shù)[J].航空學(xué)報,2015,36(6):1983-1994.[Zhang Xiang-yu,Wang Guo-hong,Li Jun-jie,et al.Tracking of hypersonic sliding target in near-space[J].Acta Aeronautica et Astronautica Sinica,2015,36(6):1983-1994.]
[6] 李俊杰,王國宏,張翔宇,等.臨近空間高超聲速滑躍式機動目標(biāo)跟蹤的IMM算法[J].電光與控制,2015,22(9):15-19.[Li Jun-jie,Wang Guo-hong,Zhang Xiang-yu,et al.An IMM algorithm for tracking near space hypersonic target with slippage leap maneuvering[J].Electronics Optics&Control,2015,22(9):15-19.]
[7] Cardillo G P,Mrstik A V,Plambeck T.A track filter for reentry objects with uncertain drag[J].IEEE Transactions on Aerospace and Electronic Systems,1999,35(2):394-409.
[8] Li X R,Jilkov V P.Survey of maneuvering target tracking.Part II:motion models of ballistic and space targets[J].IEEE Transactions on Aerospace and Electronic Systems.2010,46 (1):96-119.
[9] 雍恩米,錢煒祺,何開鋒.基于雷達跟蹤仿真的滑翔式再入彈道突防性能分析[J].宇航學(xué)報,2012,33(10):1370-1376.[Yong En-mi,Qian Wei-qi,He Kai-feng.Penetration ability analysis for glide reentry trajectory based on radar tracking[J].Journal of Astronautics,2012,33(10):1370-1376.]
[10] 趙漢元.飛行器再入動力學(xué)與制導(dǎo)[M].長沙:國防科技大學(xué)出版社,1997.
[11] Olivier D M,Robert H B.Tracking and identification of a maneuvering reentry vehicle[C].AIAA Guidance,Navigation,and Control Conference and Exhibit,Austin,Texas,USA,2003.
[12] 酈蘇丹,任萱,吳瑞林.再入彈頭的螺旋機動研究[J].宇航學(xué)報,2000,21(4):41-48.[Li Su-dan,Ren Xuan,Wu Rui-lin.Research of spiral maneuver of reentry missile[J].Journal of Astronautics,2000,21(4):41-48.]
[13] 李邦杰,王明海.滑翔式遠(yuǎn)程導(dǎo)彈滑翔段彈道研究[J].宇航學(xué)報,2009,30(6):2122-2126.[Li Bang-jie,Wang Ming-hai.Research on glide trajectory of long range glide missile[J].Journal of Astronautics,2009,30(6):2122-2126.]
[14] 李廣華,張洪波,湯國建.高超聲速滑翔飛行器典型彈道特性分析[J].宇航學(xué)報,2015,36(4):397-403.[Li Ganghua,Zhang Hong-bo, Tang Guo-jian. Typicaltrajectory characteristics of hypersonic glide vehicle[J].Journal of Astronautics,2015,36(4):397-403.]
[15] 楊皓云,賀正洪,鐘明皓,等.高超聲速飛行器側(cè)向機動性能研究[J].科學(xué)技術(shù)與工程,2013,13(30):9139-9143.[Yang Hao-yun,He Zheng-hong,Zhong Ming-hao,et al.Research on side maneuverability of hypersonic vehicle[J].Science Technology and Engineering,2013,13(30):9139-9143.]
[16] 張凱.高超聲速飛行器再入預(yù)測制導(dǎo)方法[D].長沙:國防科學(xué)技術(shù)大學(xué),2015.[Zhang Kai.Reentry predictor-corrector guidance of hypersonic vehicle[D].Changsha: National University of Defense Technology,2015.]
[17] 朱輝玉,王剛,孫泉華,等.典型氣動布局高超聲速飛行的氣動力數(shù)值評估[J].空氣動力學(xué)學(xué)報,2012,30(3):365-372.[Zhu Hui-yu,Wang Gang,Sun Quan-hua,et al.Numerical evaluation on aerodynamic oftypicalhypersonic configurations for hypersonic flight[J].Acta Aerodynamica Sinica,2012,30(3):365-372.]
[18] 戰(zhàn)培國.美國陸軍先進高超聲速武器氣動問題分析[J].航空科學(xué)技術(shù),2015,26(1):7-11.[Zhan Pei-guo.Aerodynamic analysis of US army advanced hypersonic weapon[J].Aeronautical Science&Technology,2015,26(1):7-11.]
[19] 翟岱亮,雷虎民,李炯,等.基于自適應(yīng)IMM的高超聲速飛行器軌跡預(yù)測[J].航空學(xué)報,2016,37(11):3466-3475.[Zhai Dai-liang,Lei Hu-min,Li Jiong,et al.Trajectory prediction of hypersonic vehicle based on the self-adaptive IMM[J].Acta Aeroneutica et Astronautica Sinica,2016,37(11): 3466-3475.]
[20] 趙艷麗.彈道導(dǎo)彈雷達跟蹤與識別研究[D].長沙:國防科學(xué)技術(shù)大學(xué),2007.[Zhao Yan-li.Study on radar tracking and discrimination for ballistic missiles[D].Changsha:National University of Defense Technology,2007.]
[21] 吳楠,陳磊.高超聲速滑翔再入飛行器彈道估計的自適應(yīng)卡爾曼濾波[J].航空學(xué)報,2013,34(8):1960-1971.[WuNan,Chen Lei.Adaptive Kalman filtering fortrajectory estimation of hypersonic glide reentry vehicles[J].Acta Aeronautica et Astronautica Sinica,2013,34(8):1960-1971.]
[22] 臧榮春,崔平遠(yuǎn).馬爾可夫參數(shù)自適應(yīng)IFIMM算法研究[J].電子學(xué)報,2006,34(3):521-524.[Zang Rong-chun,Cui Ping-yuan.Research on adaptive Markov parameter IFIMM algorithm[J].Acta Electronica Sinica,2006,34(3):521-524.]
[23] Phillips T H.A Common aero vehicle (CAV) model,description,and employment guide[R].Schafer Corporation for AFRL and AF-SPC,2003.
通信地址:湖北省武漢市江岸區(qū)黃浦大街288號研究生管理大隊18隊(430019)
電話:(027)85965791
E-mail:christophzhang@163.com
熊家軍(1961-),男,博士,教授,主要從事預(yù)警情報分析,數(shù)據(jù)融合方面的研究。本文通信作者。
通信地址:湖北省武漢市江岸區(qū)黃浦大街288號四系(430019)
電話:(027)85965791
E-mail:jiajunxiong@yahoo.com.cn
(編輯:張宇平)
A Tracking Algorithm of Hypersonic Glide Reentry Vehicle via Aerodynamic Model
Aiming at the problem of large errors in the state estimation of hypersonic gliding reentry vehicle(HGRV) by traditional tracking algorithms,a tracking algorithm via aerodynamic model is proposed.Firstly,aerodynamic Jerk model of the target is deduced in Velocity-turn-climb(VTC)coordinate system,and the influence of each component of the model on the target motion is analyzed.Secondly,the climb and turn maneuver models are researched respectively,and it is concluded that latter is the major difficulty in tracking.Then,the aerodynamic model is improved by introducing a priori information between the climb force parameter and the turn force parameter into the high order state vector.At the same time,an interacting multiple model(IMM)algorithm based on the aerodynamic model is constructed,considering the change of maneuver frequency in different flight modes.Simulation results show that the proposed algorithm outperforms other tracking algorithms,and it has stronger adaptability and robustness when the target is maneuvering especially.
Hypersonic vehicle;Maneuvering target tracking;Aerodynamic model;Extended Kalman filter(EKF); Interacting multiple model
V557+.1
A
1000-1328(2017)02-0123-08
10.3873/j.issn.1000-1328.2017.02.003
ZHANG Kai1,XIONG Jia-jun2,HAN Chun-yao1,LAN Xu-hui2
(1.Department of Graduation Management,Air Force Early Warning Academy,Wuhan 430019,China; 2.No.4 Department,Air Force Early Warning Academy,Wuhan 430019,China)
張 凱(1990-),男,博士生,主要從事預(yù)警情報分析,機動目標(biāo)跟蹤方面的研究。
2016-08-14;
2016-11-21
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網(wǎng)絡(luò)安全與數(shù)據(jù)管理(2022年1期)2022-08-29 03:15:20
導(dǎo)航定位學(xué)報(2022年4期)2022-08-15 08:27:00
中學(xué)生數(shù)理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀(jì)智能(數(shù)學(xué)備考)(2021年9期)2021-11-24 01:14:36
成都醫(yī)學(xué)院學(xué)報(2021年2期)2021-07-19 08:35:14
新世紀(jì)智能(數(shù)學(xué)備考)(2020年9期)2021-01-04 00:25:14
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(2020年2期)2020-06-02 11:29:24
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
