帶有振動(dòng)抑制的壓電結(jié)構(gòu)動(dòng)態(tài)形狀主動(dòng)控制
2017-03-27 06:16:52王曉明周文雅尋廣彬吳志剛
宇航學(xué)報(bào) 2017年2期
王曉明,周文雅,尋廣彬,吳志剛,
(1.大連理工大學(xué)工程力學(xué)系工業(yè)裝備結(jié)構(gòu)分析國(guó)家重點(diǎn)實(shí)驗(yàn)室,大連116024; 2.大連理工大學(xué)航空航天學(xué)院,大連116024)
帶有振動(dòng)抑制的壓電結(jié)構(gòu)動(dòng)態(tài)形狀主動(dòng)控制
王曉明1,周文雅2,尋廣彬1,吳志剛1,2
(1.大連理工大學(xué)工程力學(xué)系工業(yè)裝備結(jié)構(gòu)分析國(guó)家重點(diǎn)實(shí)驗(yàn)室,大連116024; 2.大連理工大學(xué)航空航天學(xué)院,大連116024)
針對(duì)壓電結(jié)構(gòu)在動(dòng)態(tài)形狀主動(dòng)控制過程中的振動(dòng)抑制問題,以壓電纖維復(fù)合材料作動(dòng)器驅(qū)動(dòng)的懸臂板為研究對(duì)象,建立了結(jié)構(gòu)有限元模型,并給出了控制方程。由于不合理的作動(dòng)器電壓加載方式會(huì)導(dǎo)致結(jié)構(gòu)的瞬態(tài)和殘余振動(dòng),影響形狀控制精度和系統(tǒng)穩(wěn)定性;本文在靜態(tài)形狀控制基礎(chǔ)上,提出電壓加載時(shí)間歷程的優(yōu)化問題。結(jié)合有限差分法和二次規(guī)劃算法對(duì)優(yōu)化問題進(jìn)行求解。最后,以懸臂板彎曲形狀控制為例,對(duì)所提動(dòng)態(tài)形狀控制算法進(jìn)行了校驗(yàn);并與階躍、斜坡等電壓加載方式進(jìn)行了對(duì)比。結(jié)果表明,利用優(yōu)化后的電壓加載時(shí)間歷程,能夠有效抑制結(jié)構(gòu)的瞬態(tài)和殘余振動(dòng),提高動(dòng)態(tài)形狀控制效果。
壓電作動(dòng)器;板結(jié)構(gòu);形狀控制;振動(dòng)抑制;二次規(guī)劃
0 引 言
隨著航空航天領(lǐng)域的發(fā)展,柔性結(jié)構(gòu)越來越多的應(yīng)用于飛行器結(jié)構(gòu)設(shè)計(jì)中,如太陽能帆板、柔性機(jī)翼、大型天線反射面等。利用智能材料實(shí)現(xiàn)柔性結(jié)構(gòu)的形狀主動(dòng)控制能夠有效提高結(jié)構(gòu)精度、增強(qiáng)系統(tǒng)性能并提高結(jié)構(gòu)適應(yīng)能力[1-2]。例如:主動(dòng)控制翼面形狀能夠有效改善機(jī)翼氣動(dòng)特性、提高飛行性能[3];主動(dòng)控制反射器的型面形狀能夠有效修正型面誤差,提高反射精度[4]。
隨著智能材料的發(fā)展,壓電功能復(fù)合材料因其能源轉(zhuǎn)換快速、作用頻帶寬、精確度高等諸多優(yōu)點(diǎn),在結(jié)構(gòu)型狀控制領(lǐng)域得到了廣泛的研究和應(yīng)用[5]。結(jié)構(gòu)的形狀控制分為靜態(tài)與動(dòng)態(tài)形狀控制[6],其中靜態(tài)形狀控制是將結(jié)構(gòu)的變形過程作為靜態(tài)或準(zhǔn)靜態(tài)過程進(jìn)行分析,而不考慮變形的動(dòng)態(tài)過程。目前的研究多集中于結(jié)構(gòu)靜態(tài)形狀控制[7-9]。結(jié)構(gòu)的動(dòng)態(tài)形狀控制則需考慮系統(tǒng)各變量隨時(shí)間的變化過程,如驅(qū)動(dòng)電壓加載時(shí)間歷程的影響。簡(jiǎn)單的電壓加載方式(如階躍、斜坡等信號(hào))往往會(huì)引起結(jié)構(gòu)的瞬態(tài)和殘余振動(dòng),嚴(yán)重影響控制精度和系統(tǒng)穩(wěn)定性[10]。因此,為滿足結(jié)構(gòu)的形狀精度和穩(wěn)定性等任務(wù)要求,需要有效抑制結(jié)構(gòu)變形過程中的振動(dòng)[11];以實(shí)現(xiàn)連續(xù)、光滑的高精度動(dòng)態(tài)形狀控制效果[12]。與傳統(tǒng)的結(jié)構(gòu)振動(dòng)抑制不同的是,結(jié)構(gòu)在變形過程中沒有一個(gè)固定的基準(zhǔn)狀態(tài);此時(shí)的振動(dòng)抑制需要計(jì)及形狀控制中的時(shí)變效應(yīng)[13]。由于壓電結(jié)構(gòu)的動(dòng)態(tài)響應(yīng)與電壓加載方式有直接關(guān)系,因此可以通過優(yōu)化、規(guī)劃驅(qū)動(dòng)電壓的加載時(shí)間歷程,達(dá)到抑制結(jié)構(gòu)變形過程中的振動(dòng)的目的,以提高動(dòng)態(tài)形狀控制精度。國(guó)內(nèi)在壓電結(jié)構(gòu)的動(dòng)態(tài)形狀控制方面研究還相對(duì)較少。有國(guó)外研究人員以結(jié)構(gòu)振動(dòng)最小[10]、控制能量消耗最小[14]為目標(biāo)函數(shù)研究了壓電結(jié)構(gòu)的動(dòng)態(tài)形狀控制。本文的目標(biāo)函數(shù)將同時(shí)考慮結(jié)構(gòu)振動(dòng)抑制效果和控制能量消耗,并計(jì)及作動(dòng)器電壓達(dá)到穩(wěn)態(tài)值后結(jié)構(gòu)的殘余振動(dòng),以綜合提高結(jié)構(gòu)動(dòng)態(tài)形狀控制效果。
本文以壓電纖維復(fù)合材料驅(qū)動(dòng)的懸臂板結(jié)構(gòu)為研究對(duì)象,建立其動(dòng)力學(xué)方程和控制方程。針對(duì)階躍、斜坡等簡(jiǎn)單的電壓加載方式易引起結(jié)構(gòu)瞬態(tài)和殘余振動(dòng)的問題,本研究在靜態(tài)形狀控制基礎(chǔ)上,提出了電壓加載時(shí)間歷程的優(yōu)化問題,并給出了二次規(guī)劃求解方法。最后以板結(jié)構(gòu)的彎曲形狀控制為例,驗(yàn)證了控制算法的有效性。
1 壓電結(jié)構(gòu)動(dòng)力學(xué)模型
壓電驅(qū)動(dòng)的懸臂板結(jié)構(gòu)示意圖如圖1所示。研究中采用的壓電作動(dòng)器為宏纖維復(fù)合材料(Macro fiber composites,MFC),纖維鋪設(shè)方向?yàn)榘褰Y(jié)構(gòu)的長(zhǎng)度方向。施加電壓后,在壓電作動(dòng)器驅(qū)動(dòng)下,板結(jié)構(gòu)會(huì)產(chǎn)生如圖所示的彎曲變形。
1.1 結(jié)構(gòu)有限元模型
采用四節(jié)點(diǎn)板單元建立結(jié)構(gòu)的有限元模型,如圖2(a)所示。模型包含兩種基本單元:被動(dòng)單元和主動(dòng)單元(鋪設(shè)有壓電材料的單元);兩種單元橫截面如圖2(b)和2(c)所示。由于鋪設(shè)的壓電纖維復(fù)合材料會(huì)引起主動(dòng)單元?jiǎng)偠群唾|(zhì)量特性的改變,研究中利用復(fù)合材料層合板理論計(jì)算主動(dòng)單元的剛度陣和質(zhì)量陣[15]。
利用哈密頓原理可以導(dǎo)出單元的動(dòng)力學(xué)方程[16]。其中被動(dòng)單元的動(dòng)力學(xué)方程可表示為
主動(dòng)單元的動(dòng)力方程可表示為
式中:uN為單元節(jié)點(diǎn)位移,Muu和Kuu為基板材料層的單元質(zhì)量和剛度矩陣,和表示壓電材料層引起的單元質(zhì)量和剛度增量。Fp為壓電驅(qū)動(dòng)載荷,并可用下式計(jì)算[17]
其中
式中:B1和B2分別為應(yīng)變-位移矩陣和電場(chǎng)-電勢(shì)矩陣,V為電壓值,e為壓電應(yīng)力系數(shù)矩陣。
通過組裝被動(dòng)單元和主動(dòng)單元,可得到總體剛度陣和質(zhì)量陣。為模擬真實(shí)的結(jié)構(gòu)動(dòng)力學(xué)響應(yīng),還需考慮阻尼效應(yīng)。因此,壓電驅(qū)動(dòng)懸臂板的整體有限元方程可以表示為
式中:x為節(jié)點(diǎn)位移向量,M、K分別表示結(jié)構(gòu)整體質(zhì)量、剛度矩陣,C為阻尼矩陣,研究中采用瑞利阻尼假設(shè),Bu為作動(dòng)器位置矩陣,u為加載電壓向量,其維數(shù)與作動(dòng)器個(gè)數(shù)一致。
1.2 狀態(tài)空間模型
由于有限元模型單元數(shù)、節(jié)點(diǎn)數(shù)較多,動(dòng)力學(xué)方程階數(shù)較大,不便于進(jìn)行控制律設(shè)計(jì)。研究中采用模態(tài)分解法進(jìn)行模型降階[18],引入模態(tài)坐標(biāo)變換
式中:q為廣義坐標(biāo)向量,Φ為振型矩陣。將上述方程代入方程(5),并在式子兩端左乘ΦT;進(jìn)一步整理可得
為便于設(shè)計(jì)控制器,可將系統(tǒng)模型表示為狀態(tài)空間形式如下
其中
系統(tǒng)的輸出可根據(jù)不同任務(wù)或者控制目標(biāo)而設(shè)定。本文研究板結(jié)構(gòu)的彎曲形狀控制,因此將端部撓度作為控制輸出變量;即
式中:y表示壓電驅(qū)動(dòng)的懸臂板結(jié)構(gòu)的端部撓度,Cy為輸出矩陣。
2 靜態(tài)與動(dòng)態(tài)形狀控制
壓電結(jié)構(gòu)的形狀控制可以分為靜態(tài)與動(dòng)態(tài)形狀控制[6]。靜態(tài)形狀控制僅利用靜力方程,不考慮系統(tǒng)各變量隨時(shí)間的變化,用于計(jì)算達(dá)到理想形狀所需的終端加載電壓,或在給定電壓下結(jié)構(gòu)的穩(wěn)態(tài)變形。動(dòng)態(tài)形狀控制則需要計(jì)及時(shí)間效應(yīng),考慮各變量隨時(shí)間的變化,即不僅需要結(jié)構(gòu)能夠精確地達(dá)到目標(biāo)形狀,還要求變形過程能夠滿足一定的動(dòng)態(tài)性能。
以懸臂板結(jié)構(gòu)的彎曲形狀控制為例。設(shè)板在初始時(shí)刻處于未變形狀態(tài),且沒有電壓加載,即X0= 0,u0=0。現(xiàn)在希望通過作動(dòng)器的驅(qū)動(dòng),使得其端部撓度y達(dá)到期望值yc。首先令狀態(tài)變量對(duì)時(shí)間的導(dǎo)數(shù)為零,則可以利用下式計(jì)算所需的作動(dòng)器終端穩(wěn)態(tài)電壓
確定了壓電作動(dòng)器的初始電壓u0和終端電壓uf,但電壓值從u0到uf的加載時(shí)間歷程沒有確定。從系統(tǒng)模型可知,作動(dòng)器電壓加載時(shí)間歷程將會(huì)對(duì)結(jié)構(gòu)的動(dòng)力學(xué)響應(yīng)產(chǎn)生直接影響。一些簡(jiǎn)單的電壓加載方式(如階躍、斜坡等)將會(huì)激發(fā)結(jié)構(gòu)振動(dòng)模態(tài),產(chǎn)生瞬態(tài)和殘余振動(dòng)問題,嚴(yán)重影響控制精度和系統(tǒng)穩(wěn)定性[10];相關(guān)仿真校驗(yàn)將在第4章給出。
因此,為實(shí)現(xiàn)連續(xù)、光滑的高精度動(dòng)態(tài)形狀控制效果,需要對(duì)作動(dòng)器電壓加載時(shí)間歷程進(jìn)行優(yōu)化設(shè)計(jì),以抑制結(jié)構(gòu)在變形過程中的振動(dòng)。
3 優(yōu)化問題與求解
在帶有振動(dòng)抑制的壓電結(jié)構(gòu)動(dòng)態(tài)形狀控制中,需要計(jì)及時(shí)間因素,考慮系統(tǒng)各變量隨時(shí)間的變化過程。設(shè)初始時(shí)刻為t0,期望達(dá)到目標(biāo)形狀的時(shí)間為t1。本研究的目的是設(shè)計(jì)[t0,t1]時(shí)間段內(nèi)作動(dòng)器電壓的加載時(shí)間歷程,抑制結(jié)構(gòu)在變形過程中的振動(dòng);即設(shè)計(jì)最優(yōu)控制輸入u(t),使得結(jié)構(gòu)的振動(dòng)能量最小。
3.1 優(yōu)化問題的提法
壓電作動(dòng)器電壓加載時(shí)間歷程的優(yōu)化問題可描述如下:
尋求最優(yōu)控制輸入
使得性能指標(biāo)J(見式(13))取得極小值。
式中:P1、P2為半正定加權(quán)矩陣,P3為正定加權(quán)矩陣,t2表示電壓達(dá)到終端值uf后的某個(gè)時(shí)刻。性能指標(biāo)J中的第一項(xiàng)表征在電壓加載過程中結(jié)構(gòu)的瞬態(tài)振動(dòng)能量,第二項(xiàng)表征電壓達(dá)到終端值uf后結(jié)構(gòu)的殘余振動(dòng)能量,第三項(xiàng)則表示控制能量消耗。通過調(diào)節(jié)上述權(quán)系數(shù)矩陣,可對(duì)結(jié)構(gòu)振動(dòng)抑制效果和控制消耗之間進(jìn)行權(quán)衡。
此外,設(shè)計(jì)變量和性能指標(biāo)受到系統(tǒng)動(dòng)力學(xué)方程、初邊值條件以及壓電作動(dòng)器電壓限幅等條件的約束。因此,優(yōu)化中的約束條件可表示為
式中:umin、umax為壓電作動(dòng)器允許可用的最小、最大加載電壓。
基于上述描述,帶有振動(dòng)抑制的壓電結(jié)構(gòu)動(dòng)態(tài)形狀控制問題已經(jīng)轉(zhuǎn)化為一個(gè)性能指標(biāo)為二次型表達(dá)式的動(dòng)態(tài)優(yōu)化問題。
3.2 二次規(guī)劃方法
方程(12)~(14)給出了優(yōu)化問題的三要素:設(shè)計(jì)變量、性能指標(biāo)和約束條件。求解上述優(yōu)化問題可利用多種優(yōu)化算法,由于該優(yōu)化問題的目標(biāo)函數(shù)是系統(tǒng)狀態(tài)和輸入的二次型積分表達(dá)式,且約束條件都是線性約束,本研究采用最優(yōu)化理論中的二次規(guī)劃方法對(duì)優(yōu)化問題進(jìn)行求解[19]。
標(biāo)準(zhǔn)的二次規(guī)劃形式為代數(shù)表達(dá)式,而上述優(yōu)化問題的性能指標(biāo)(13)為積分表達(dá)式,系統(tǒng)動(dòng)力學(xué)方程(8)為微分表達(dá)式。因此研究中采用有限差分法中改進(jìn)的歐拉公式對(duì)系統(tǒng)動(dòng)力學(xué)方程在時(shí)間域上離散,即
式中:Δt為離散時(shí)間步長(zhǎng)。
通過上述離散處理,第3.1節(jié)中提出的電壓加載時(shí)間歷程優(yōu)化問題可轉(zhuǎn)化為標(biāo)準(zhǔn)的二次規(guī)劃求解形式。研究中使用二次規(guī)劃理論中的“有效集”算法[19]對(duì)優(yōu)化問題進(jìn)行求解。
4 仿真校驗(yàn)
仿真校驗(yàn)中采用的懸臂板和采用的MFC壓電作動(dòng)器的幾何、材料參數(shù)如表1所示。結(jié)構(gòu)的有限元網(wǎng)格和作動(dòng)器粘貼位置如圖3所示。懸臂板結(jié)構(gòu)共劃分30×8個(gè)單元,其中每一片作動(dòng)器覆蓋6×6個(gè)單元。結(jié)構(gòu)阻尼比設(shè)為0.02,用于計(jì)算Rayleigh阻尼比例系數(shù)。
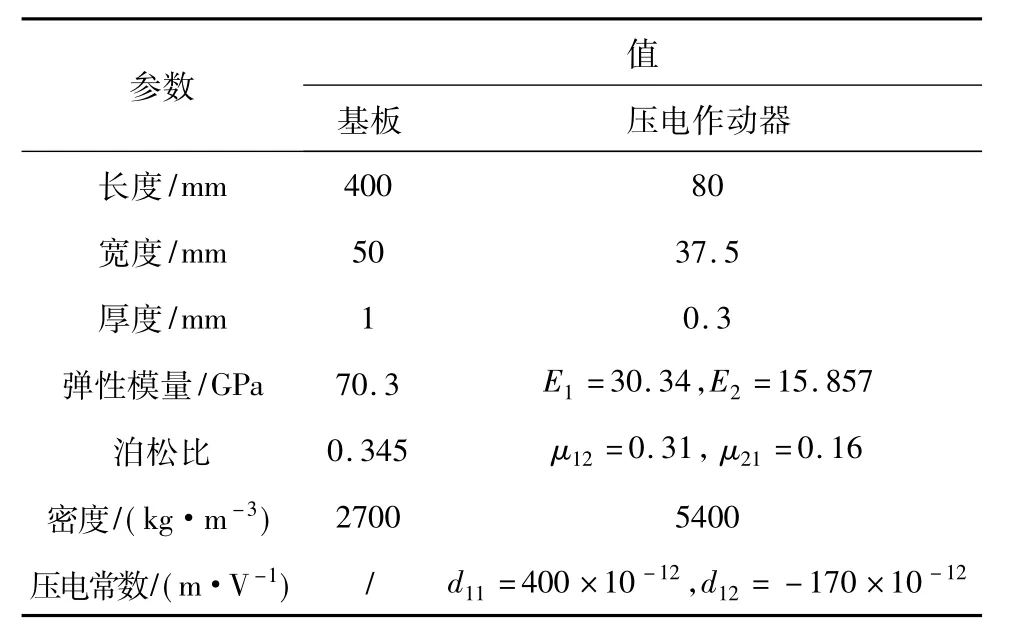
表1 懸臂板和作動(dòng)器的相關(guān)參數(shù)Table 1 Parameters of the cantilever plate and piezoelectric actuators
仿真中以懸臂板端部中點(diǎn)(圖3中右端的P點(diǎn))的撓度為控制輸出。控制目標(biāo)是:期望通過壓電作動(dòng)器驅(qū)動(dòng)懸臂板變形,使得端部撓度在t1=1 s時(shí)達(dá)到穩(wěn)態(tài)值yc=-5 mm。利用式(11)可以求出達(dá)到該目標(biāo)形狀所需的2個(gè)作動(dòng)器的終端穩(wěn)態(tài)電壓值
圖4給出了在作動(dòng)器終端穩(wěn)態(tài)電壓uf的驅(qū)動(dòng)下懸臂板達(dá)到的終端穩(wěn)態(tài)形狀。
如前所述,作動(dòng)器電壓加載時(shí)間歷程會(huì)對(duì)結(jié)構(gòu)的動(dòng)態(tài)響應(yīng)產(chǎn)生直接影響。在后續(xù)仿真中,選取t2=2 s。圖5(b)給出了懸臂板端部撓度在階躍電壓加載時(shí)間歷程ustep(見圖5(a))下的動(dòng)態(tài)響應(yīng)曲線。其中階躍輸入信號(hào)的表達(dá)式為
圖6(b)給出了懸臂板端部撓度在斜坡電壓加載時(shí)間歷程uramp(見圖6(a))下的動(dòng)態(tài)響應(yīng)曲線。其中斜坡輸入信號(hào)的表達(dá)式為
從圖5可以看出,在階躍形式的電壓加載歷程下,懸臂板結(jié)構(gòu)產(chǎn)生了劇烈振動(dòng)現(xiàn)象,端部最大撓度超調(diào)近1倍,收斂到目標(biāo)穩(wěn)態(tài)形狀需較長(zhǎng)時(shí)間。由圖6可知,在采用了斜坡加載方式后,懸臂板振動(dòng)在一定程度上得到了抑制,但依然存在明顯的瞬態(tài)和殘余振動(dòng)。雖然結(jié)構(gòu)的振動(dòng)幅值在阻尼作用下會(huì)逐漸衰減,但所需時(shí)間較長(zhǎng)。綜上可知,簡(jiǎn)單、不合理的電壓加載方式會(huì)激發(fā)結(jié)構(gòu)振動(dòng)模態(tài),引起結(jié)構(gòu)的瞬態(tài)和殘余振動(dòng)問題,嚴(yán)重影響形狀控制精度和系統(tǒng)穩(wěn)定性。
為了抑制結(jié)構(gòu)在變形過程中產(chǎn)生的振動(dòng),采用第3節(jié)給出的二次規(guī)劃方法對(duì)作動(dòng)器電壓加載時(shí)間歷程進(jìn)行優(yōu)化設(shè)計(jì)。優(yōu)化后的電壓加載歷程為uoptimal,如圖7(a)所示,對(duì)應(yīng)的懸臂板端部撓度響應(yīng)如圖7(b)所示。
首先從圖7(b)可以看出,在優(yōu)化后的電壓加載歷程作用下,結(jié)構(gòu)變形過程的瞬態(tài)和殘余振動(dòng)得到了有效抑制。端部撓度在給定的時(shí)間內(nèi)平滑地從初始值達(dá)到目標(biāo)值;并保持穩(wěn)定,沒有產(chǎn)生超調(diào)。從圖7(a)可以看出,優(yōu)化后的作動(dòng)器電壓值在0.5 s前緩慢增加,從而避免激發(fā)結(jié)構(gòu)的振動(dòng)模態(tài),以減小結(jié)構(gòu)在電壓加載過程中的瞬態(tài)振動(dòng)幅值。而當(dāng)電壓值接近終端穩(wěn)態(tài)電壓時(shí)出現(xiàn)了較大幅值的波動(dòng)。可以理解,正是由于作動(dòng)器加載電壓隨時(shí)間的合理變化,抑制了結(jié)構(gòu)在變形過程中產(chǎn)生的瞬態(tài)和殘余振動(dòng)。
由于作動(dòng)器加載電壓在接近終端值時(shí)出現(xiàn)了較大幅值的變化,這雖然有助于結(jié)構(gòu)的快速穩(wěn)定,但對(duì)作動(dòng)器和控制系統(tǒng)提出了較高的要求。為避免短時(shí)間內(nèi)的電壓跳變現(xiàn)象,有兩種改善方法:一是對(duì)性能指標(biāo)中第三項(xiàng)進(jìn)行拆分細(xì)化,增加末端控制消耗能量在性能指標(biāo)中的權(quán)重;二是對(duì)每一個(gè)時(shí)間步長(zhǎng)Δt內(nèi)的電壓變化進(jìn)行約束限制,即增加不等式約束。本研究中采用第二種方法,即增加如下約束條件
由圖8(a)可以看出,在增加了對(duì)電壓的不等式約束后,作動(dòng)器電壓值在接近uf時(shí)的跳變現(xiàn)象得到了有效改善,更易于在實(shí)際中應(yīng)用。另一方面,懸臂板端部撓度在接近目標(biāo)穩(wěn)態(tài)值yc時(shí)的響應(yīng)曲線斜率減小了,使得結(jié)構(gòu)的動(dòng)態(tài)變形過程更加平滑,如圖8(b)所示。
對(duì)比圖5~8可以看出,在壓電結(jié)構(gòu)的形狀主動(dòng)控制中,不僅需要結(jié)構(gòu)能夠精確達(dá)到某個(gè)形狀,還須滿足一定的動(dòng)態(tài)性能。利用本文的優(yōu)化方法,可以規(guī)劃出更為合理的電壓加載時(shí)間歷程,抑制結(jié)構(gòu)變形過程中的振動(dòng),實(shí)現(xiàn)連續(xù)、光滑的變形效果,提高動(dòng)態(tài)形狀控制精度。
5 結(jié) 論
本文研究了帶有振動(dòng)抑制的壓電結(jié)構(gòu)的動(dòng)態(tài)形狀主動(dòng)控制。推導(dǎo)了壓電驅(qū)動(dòng)的懸臂板結(jié)構(gòu)的動(dòng)力學(xué)方程,并采用二次規(guī)劃方法對(duì)作動(dòng)器的電壓加載歷程進(jìn)行了優(yōu)化設(shè)計(jì)。利用優(yōu)化后的電壓加載方式能夠有效抑制結(jié)構(gòu)在變形過程中產(chǎn)生的振動(dòng),提高動(dòng)態(tài)形狀控制精度。
[1] Baier H,Datashvili L.Active and morphing aerospace structures– a synthesis between advanced materials,structures and mechanisms[J].International Journal of Aeronautical and Space Sciences,2011,12(3):225-240.
[2] 冷勁松,蘭鑫,劉彥菊,等.形狀記憶聚合物復(fù)合材料及其在空間可展開結(jié)構(gòu)中的應(yīng)用[J].宇航學(xué)報(bào),2010,31(4): 950-956.[Leng Jin-song,Lan Xin,Liu Yan-ju,et al.Shape memory polymers composites and their applications in deployable structures[J].Journal of Astronautics,2010,31(4):950-956.]
[3] 李敏,陳偉民,賈麗杰.壓電驅(qū)動(dòng)器的氣動(dòng)彈性應(yīng)用[J].航空學(xué)報(bào),2009,30(12):2301-2310.[Li Min,Chen Weimin,Jia Li-jie.Application of piezoelectric actuators to aircraft aeroelastic performance enhancement[J].Acta Aeronautica et Astronautica Sinic,2009,30(12):2301-2310.]
[4] 王志,曹玉巖,周超,等.柔性壓電智能反射面的靜態(tài)形狀控制[J].光學(xué)精密工程,2014,22(10):2715-2724.[Wang Zhi,Cao Yu-yan,Zhou Chao,et al.Static shape control of flexible piezoelectric smart reflectors[J].Optics and Precision Engineering,2014,22(10):2715-2724.]
[5] Schrock J,Meurer T,Kugi A.Motion planning for piezoactuated flexible structures:modeling,design,and experiment[J].Ieee Transactions on Control Systems Technology,2013,21(3):807-819.
[6] Irschik H.A review on static and dynamic shape control of structures by piezoelectric actuation[J].Engineering Structures,2002,24(1):5-11.
[7] 高仁璟,張瑩,吳書豪,等.面向結(jié)構(gòu)型狀控制的驅(qū)動(dòng)器結(jié)構(gòu)參數(shù)與控制電壓協(xié)同優(yōu)化設(shè)計(jì)[J].光學(xué)精密工程,2014,22(6):1538-1546.[Gao Ren-jing,Zhang Ying,Wu Shuhao,et al.Integrated design optimization of actuator structural parameters and control voltages for morphing structural shapes[J].Optics and Precision Engineering,2014,22(6):1538-1546.]
[8] 李書陽,鄭世杰,王宏濤.PLZT光致伸縮層合梁的非接觸形狀控制[J].宇航學(xué)報(bào),2012,33(4):514-519.[Li Shuyang,Zheng Shi-jie,Wang Hong-tao.Non-contact shape control of the beam based on PLZT photostrictive actuator[J].Journal of Astronautics,2012,33(4):514-519.]
[9] 王劍,趙國(guó)忠,劉寶山.壓電曲殼單元及其形狀控制[J].工程力學(xué),2008,25(4):224-229.[Wang Jian,Zhao Guozhong,Liu Bao-shan.Shape controlofpiezoelectric shell structures[J].Engneering Mechanics,2008,25(4):224-229.]
[10] Kalaycioglu S,Silva D.Minimization of vibration of spacecraft appendages during shape control using smart structures[J].Journal of Guidance Control and Dynamics,2000,23(3):558-561.
[11] 徐高楠,黃海,李偉鵬,等.空間撓性結(jié)構(gòu)的stewart平臺(tái)主動(dòng)基座振動(dòng)控制[J].宇航學(xué)報(bào),2015,36(4):438-445.[Xu Gao-nan,Huang Hai,Li Wei-peng,et al.Active vibration control of space flexible structure using stewart platform as active base[J].Journal of Astronautics,2015,36(4):438-445.]
[12] 陸宇平,何真.變體飛行器控制系統(tǒng)綜述[J].航空學(xué)報(bào),2009,30(10):1906-1911.[Lu Yu-ping,He Zhen.A survey of morphing aircraft control systems[J].Acta Aeronautica et Astronautica Sinic,2009,30(10):1906-1911.]
[13] Chakravarthy A,Grant D T,Lind R.Time-varying dynamics of a micro air vehicle with variable-sweep morphing[J].Journal of Guidance Control and Dynamics,2012,35(3):890-903.
[14] Hubbard J E.Dynamic shape control of a morphing airfoil using spatially distributed transducers[J].Journal of Guidance Control and Dynamics,2006,29(3):612-616.
[15] 沈觀林,胡更開.復(fù)合材料力學(xué)[M].北京:清華大學(xué)出版社,2006:202-204.
[16] Allik H,Hughes T J R.Finite element method for piezoelectric vibration[J].International Journal for Numerical Methods in Engineering,1970,2(2):151-157.
[17] Zhang X,Kang Z.Dynamic topology optimization of piezoelectric structures with active control for reducing transient response[J].Computer Methods in Applied Mechanics and Engineering,2014,281:200-219.
[18] 張亞輝,林家浩.結(jié)構(gòu)動(dòng)力學(xué)基礎(chǔ)[M].大連:大連理工大學(xué)出版社,2007:85-86.
[19] 陳寶林.最優(yōu)化理論與算法[M].北京:清華大學(xué)出版社,2005:417-422.
通信地址:遼寧省大連市高新園區(qū)凌工路2號(hào)大連理工大學(xué)綜合實(shí)驗(yàn)1號(hào)樓(116024)
電話:(0411)84706521
E-mail:xiaomingwang@mail.dlut.edu.cn
周文雅(1981-),男,博士,副教授,主要從事飛行器動(dòng)力學(xué)與控制方面的研究。本文通信作者。
通信地址:遼寧省大連市高新園區(qū)凌工路2號(hào)大連理工大學(xué)綜合實(shí)驗(yàn)1號(hào)樓(116024)
電話:(0411)84706521
E-mail:zwy@dlut.edu.cn
(編輯:牛苗苗)
Dynamic Shape Control of Piezoelectric Structures with Vibration Suppression
WANG Xiao-ming1,ZHOU Wen-ya2,XUN Guang-bin1,WU Zhi-gang1,2
(1.State Key Laboratory of Structural Analysis for Industrial Equipment,Department of Engineering Mechanics,Dalian University of Technology,Dalian 116024,China; 2.School of Aeronautics and Astronautics,Dalian University of Technology,Dalian 116024,China)
The vibration suppression during the dynamic shape control of the piezoelectric structures is investigated in this paper.The object of this study is a cantilever plate structure with the actuation of the piezoelectric fiber composite materials.The structural finite element model is established and the control equations are given.Some irrational voltage profiles may result in transient and residual vibrations of the structure which would reduce the control precision and stability of the system.A voltage profile optimization problem is formulated based on the static shape control results.The optimization problem is solved using the finite difference method and the quadratic programming.In the end,the bending shape control cases are simulated to verify the effectiveness of the proposed dynamic shape control approach by comparison with the step and ramp voltage profiles.The results show that the transient and residual vibrations of the structure have been effectively suppressed using the optimal voltage profiles and the dynamic shape control performance has been improved.
Piezoelectric actuators;Plate structures;Shape control;Vibration suppression;Quadratic programming
V214.3
A
1000-1328(2017)02-0185-07
10.3873/j.issn.1000-1328.2017.02.010
王曉明(1989-),男,博士生,主要從事動(dòng)力學(xué)與控制方面的研究。
2016-10-08;
2016-12-08
國(guó)家自然科學(xué)基金(11432010)
猜你喜歡
科學(xué)大眾(2023年17期)2023-10-26 07:39:14
房地產(chǎn)導(dǎo)刊(2022年5期)2022-06-01 06:20:14
哲學(xué)評(píng)論(2021年2期)2021-08-22 01:53:34
建材發(fā)展導(dǎo)向(2021年12期)2021-07-22 08:06:48
建材發(fā)展導(dǎo)向(2021年7期)2021-07-16 07:07:52
中學(xué)生數(shù)理化(高中版.高二數(shù)學(xué))(2021年12期)2021-04-26 07:43:48
天天愛科學(xué)(2020年6期)2020-09-10 07:22:44
中華詩詞(2019年7期)2019-11-25 01:43:04
數(shù)學(xué)物理學(xué)報(bào)(2017年6期)2018-01-22 02:26:40
影視與戲劇評(píng)論(2016年0期)2016-11-23 05:26:01
