微型SAR成像系統分析
2017-03-27 01:29:54潘勇先
雷達與對抗 2017年1期
關鍵詞:信號
潘勇先,劉 麗
(中國電子科技集團公司第三十八研究所,合肥 230088)
微型SAR成像系統分析
潘勇先,劉 麗
(中國電子科技集團公司第三十八研究所,合肥 230088)
微型SAR分辨率高,體積小,重量輕,受到廣泛重視,將廣泛應用于無人機偵察平臺。介紹了調頻連續波SAR的去調頻信號模型,重點推導了多普勒誤差的補償方法,并推導出改進的距離-多普勒成像算法。通過仿真和實時成像驗證了該算法的正確性和可行性。
微型SAR;雷達成像;調頻連續波;改進的距離-多普勒算法
0 引 言
調頻連續波技術和合成孔徑技術結合的調頻連續波合成孔徑雷達(FMCW SAR)兼具連續波雷達和SAR的優勢,是一種小型、低成本、低功耗、高分辨率成像雷達,有廣闊的軍用和民用前景,是微型SAR發展的一個重要方向。由于接收端采用了去調頻接收體制,產生了較小的差頻帶寬,從而降低對視頻接收通道、后端A/D采集設備和信號處理速度的要求。FMCW SAR在一個脈沖重復間隔內連續地發射信號,這樣就不需要很高的峰值功率,用固態放大器就可以滿足要求,而較低的發射功率也使其具有隱蔽性好、抗反輻射導彈能力強的特點。
1 基本原理
在調頻連續波SAR系統中,同樣發射矩形包絡的線性調頻信號,其回波信號寫為
(1)
式中,τ表示方位向慢時間,t表示距離向快時間。
在調頻連續波SAR系統中,雷達發射連續波,其發射周期與脈沖SAR相當。由于連續波占空系數為1,所以調頻連續波SAR的發射信號持續時間就比脈沖信號長得多。發射信號持續期間內雷達載機前進引起的多普勒頻率的變化就不能忽略。在這種情況下,載機與點目標之間的距離R就要包含連續波發射信號持續時間內載機的運動引起的距離變化。因此,重新定義點目標p與飛機雷達天線的距離R,有
(2)
將式(2)代入式(1),得到式(1)中的指數項為
(3)
分析式(3)第1項為載頻,第2項為方位多普勒信號,第3項為距離向線性調頻信號,第4項為方位向和距離向耦合信號,第5項為固定相位項。前5項和脈沖SAR中回波信號完全相同。第6、7項是方位向和距離向信號除距離遷移現象外的再次耦合,第8、9項是距離向的二次項和三次項信號。后面4項都是由于連續波發射信號持續時間內載機的運動引起距離變化,進而引起的相位變化。調頻連續波SAR回波信號中不僅包含了和脈沖SAR回波信號中相同的方位向和距離向耦合項,而且由于不能繼續采用stop-and-go的近似,引入了一個信號發射周期內飛機的運動,從而造成了方位向和距離向的再次耦合,以及距離向二次項及三次項相位信息。
2 多普勒誤差的補償方法
調頻連續波SAR系統中會引入新的距離向和方位向的耦合,以及距離向二次項及三次項相位信息。其中距離向二次項及三次項相位信息,即式 (3)中的第8、9項,造成的誤差大小與載頻、作用距離、飛機速度、發射信號持續時間以及采樣率有關。根據一般的SAR系統參數,該項造成的誤差非常小,一般小于10-5rad,因此該項造成的相位誤差可以忽略不計。式 (3)中的第6、7項分別是距離向的一次項和二次項信號同方位向一次項信號的耦合。它將會帶來距離向信號的散焦,并會引起距離向壓縮后目標位置沿方位向發生偏移。同時,由于每一個方位向回波采樣時刻都存在沿距離向的“快”時間偏移,因此對于單個點目標的回波,方位向采樣點的采樣間隔呈現出非均勻采樣的變化。這時,如果不對方位向信號進行插值處理,將會在方位向壓縮后也出現散焦的現象。因此,這種多普勒效應所帶來的誤差,如果不經過補償,將會嚴重影響圖像質量,造成圖像的降晰。
對調頻連續波回波信號進行處理,一般采用對回波信號做差頻的方式。假設調頻連續波SAR發射矩形包絡的線性調頻信號,表示為
(4)
式中,μ為發射信號的調頻斜率,fc為載頻,PRI為發射信號重復周期。回波信號可以表示為
(5)

(6)
考慮脈沖SAR中的處理方法,對調頻連續波SAR的差頻信號進行采樣,采樣過程同樣分為“快”時間采樣(距離向)和“慢”時間采樣(方位向)兩個過程。在脈沖SAR系統中,采用stop-and-go的近似,載機與點目標之間的距離R只與不同的脈沖起始時刻(即“慢”時間)有關,而與脈沖持續時間內(即“快”時間)載機的運動無關。rs的表達式可以寫為
(7)
式中,R0是載機到點目標的最近距離,xa是載機位置,xp是點目標位置,n代表“慢”時間采樣點,fs代表方位向采樣間隔,va是載機運動速度。

(8)
其中,m代表“快”時間采樣點,ft代表距離向采樣間隔。這時包含載機位置的“慢”時間變化就會與“快”時間變化耦合。因此,在信號的“慢”時間內,載機的運動就不能夠忽略。
將式(8)代入式(6 ),得到采樣后形成的兩維數據矩陣。在不考慮殘留相位誤差的情況下回波差頻信號表達式變為
(9)
式中,第1項為回波點目標的距離向位置,第2項為方位向線性調頻回波,第3項為距離向與方位向的耦合,前3項和脈沖SAR中回波特性相同。第4項為距離向和方位向信號的再次耦合,第5項為距離向信息的二次和三次項。比較式(9)和式(3),雖然兩者的表示形式不相同,但其中含有的相位信息是相同的。這說明利用兩種信號表達方式得到的結果相同,回波信號與回波差頻信號中含有的相位信息相同。根據對式(3)中第8、9項的分析,可以證明式(9 )中的第5項也可以忽略不計。
與脈沖SAR回波相比,在方位向的“慢”時間回波采樣信號中,實際上是在每個回波脈沖中都增加了一個“快”時間方向的回波延遲。在實際的回波信號中,由于回波信號是地面上散射點回波的疊加,不同距離上的回波信號其方位向的回波特性并不相同,如果需要在時域對式(9)項進行補償,就需要進行插值處理。因此,可以選擇在方位向多普勒域進行精確補償。

(10)
其中ζa=-vafdm/fs就是多普勒誤差在方位向多普勒域的表達形式,fd代表方位向多普勒頻率。

3 微型SAR成像的改進R-D算法
在調頻連續波SAR系統中,由于調頻連續波信號相比脈沖信號持續時間長很多,所以不能采用“走-停-走”的近似,必須考慮載機在發射信號持續時間內的運動,也即要考慮到距離向“快”時間變量的影響。根據前面的分析,可以對調頻連續波SAR中的多普勒效應進行補償,通過將回波差頻信號變換到方位多普勒域,對回波信號的多普勒相位誤差進行補償,就可以在接下來的處理中近似采用“走-停-走”的估計了。
接下來的處理和脈沖SAR一樣,也是把二維移變濾波器分解成兩個一維處理的級聯。先對每個回波脈沖進行距離向壓縮,然后在R-D域中利用插值對距離徙動引起的縱向和橫向間的耦合進行校正,最后完成橫向聚焦處理。
基于上述處理過程,調頻連續波SAR改進的R-D算法具體實現步驟如圖1所示。該算法仿真參數設置見表1。

圖1 調頻連續波的改進R-D算法流程
4 仿真結果
假設把場景看成是一個二維平面坐標,在場景中心線上、慢時間為零的時刻放置一個靜止的點目標,成像結果如圖2所示。圖2為多普勒頻移不補償時的方位脈壓剖面圖。為了使圖像看起來更為平滑,采取了16倍插值,可以看出左右旁瓣嚴重不對稱,而且有明顯的越距離單元徙動發生。這可以通過圖3的等高線圖看出。在圖2中,主瓣和旁瓣模糊在一起,旁瓣形狀不規則,而且有虛假的旁瓣產生,造成目標無法分辨。相比之下,對于多普勒頻移補償后的結果,如圖3、4,方位脈壓剖面圖中旁瓣對稱,而且等高線圖中旁瓣更為規則,主瓣、旁瓣明顯分開,能夠進行可靠的分辨。由此可以看出多普勒頻移補償的重要性,而且也證明本文方法是有效的。

表1 R-D算法仿真參數設置
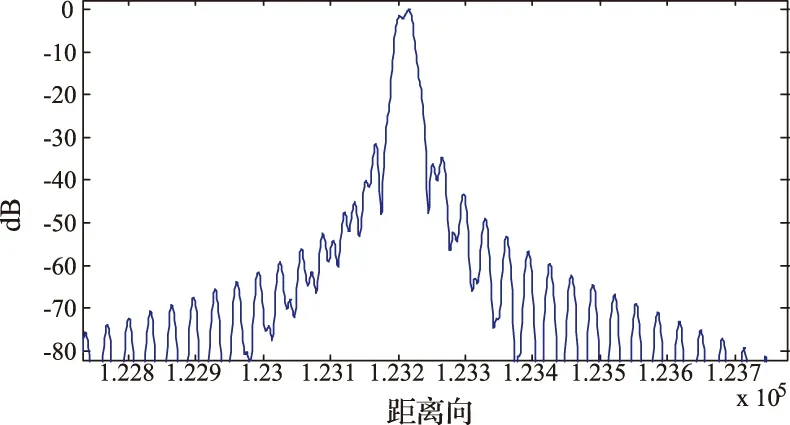
圖2 補償前的點目標剖面圖

圖3 補償前的點目標成像

圖4 補償后的點目標剖面圖
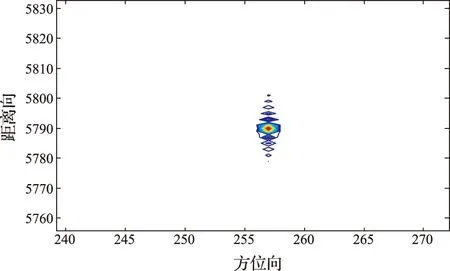
圖5 補償后的點目標成像
5 結束語
調頻連續波(FMCW)技術由于其自身的優越性,與SAR技術的結合必將受到越來越多的關注。本文建立了調頻連續波SAR的回波信號模型,對于平臺連續運動引入的多普勒頻移,如果不補償將會對方位聚焦造成影響,從而影響成像質量,處理算法在頻率變標的同時補償這個多普勒頻移項,消除了平臺連續運動的影響,獲得了聚焦良好的圖像。
[1] 孫寒冰,等.改進的FMCW SAR距離-多普勒成像算法[J].電子對抗,2010(1).
[2] 張玉玲,等.微型SAR發展狀況[J].艦船電子對抗,2008(10).
[3] 保錚,邢孟道,等.雷達成像技術[M].北京:電子工業出版社,2005:62-64.
Analysis of miniature SAR imaging system
PAN Yong-xian, LIU Li
(No.38 Research Institute of CETC, Hefei 230088)
Miniature synthetic aperture radar (SAR), featuring high resolution, small size and light weight, attracts extensive attention and will be widely used in the reconnaissance platform of the UAVs. The model of the de-chirp signals is introduced for the FMCW SAR with emphasis on the derivation of the Doppler error compensation. Besides, the modified range-Doppler imaging algorithm is derived, being verified to be correct and feasible via the simulation and the real-time imaging.
miniature SAR; radar imaging; FMCW; modified range-Doppler algorithm
2017-01-10;
2017-01-22
潘勇先(1977-),女,工程師,碩士,研究方向:雷達信號處理;劉麗(1978-), 女,工程師,碩士,研究方向:雷達信號處理。
TN958
A
1009-0401(2017)01-0001-04
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06
