一種四點機電調平系統(tǒng)的虛腿補償控制策略與機電聯(lián)合仿真分析
2017-03-27 01:25:22舒亞海莊文許李珂翔
雷達與對抗 2017年1期
舒亞海,莊文許,李珂翔,楊 猛
(1. 海軍駐江南造船(集團)有限責任公司軍事代表室,上海 201913;2. 中國船舶重工集團公司第七二四研究所,南京 211153)
一種四點機電調平系統(tǒng)的虛腿補償控制策略與機電聯(lián)合仿真分析
舒亞海1,莊文許2,李珂翔2,楊 猛2
(1. 海軍駐江南造船(集團)有限責任公司軍事代表室,上海 201913;2. 中國船舶重工集團公司第七二四研究所,南京 211153)
針對雷達車四點機電調平系統(tǒng)的調平和“虛腿”問題,通過分析調平系統(tǒng)的幾何特性和受力特性,給出了調平后各撐腿支撐力的優(yōu)化解,提出了一種使用伺服電機繞組電流估算支撐力的方法。基于該優(yōu)化解和繞組電流的關系設計了一種“虛腿”補償控制策略,使得雷達車在調平過程中和調平后4個支腿始終保持合理的支撐力,從而避免產生“虛腿”,提高雷達車的安全性,并通過機電聯(lián)合仿真驗證了該控制策略的有效性。
雷達車;機電調平系統(tǒng);虛腿;聯(lián)合仿真
0 引 言
雷達車是車載機動雷達的重要組成部分,其調平系統(tǒng)是影響雷達系統(tǒng)工作性能和安全的關鍵因素。為保證雷達系統(tǒng)的工作性能,要求其具有較高的調平精度;為保障雷達系統(tǒng)的機動性和安全性,要求其具有較快的調平速度,并使各支撐腿受力均衡(即消除“虛腿”)。如果各支撐腿受力極不均勻或者產生“虛腿”,將破壞雷達車的穩(wěn)定性,在外部擾動載荷作用下,可能發(fā)生車體振蕩、傾覆、整體位移等諸多不利影響,將嚴重影響雷達車的安全性。特別是對于四點支撐調平系統(tǒng),“虛腿”帶來的危害更為明顯。文獻[1-2]針對液壓調平系統(tǒng),對支撐腿支撐力和平臺水平姿態(tài)采用雙閉環(huán)控制,獲得了快速平穩(wěn)的調平效果,且通過實時檢測各支撐腿的支撐力來避免“虛腿”。這種方法對于沒有力傳感器的機電調平系統(tǒng)不適用。文獻[3-4]所闡述的雷達天線車調平系統(tǒng)采用直流電機為執(zhí)行元件,先讀取電流值判斷支腿是否觸地,然后進行調平過程,靠調節(jié)支撐腿伸長滿足的幾何條件來保證無“虛腿”。這種方法具有一定的效果,但其能否使得支腿受力均勻尚沒有驗證。
一種常見的雷達車采用機電調平四點支撐方式,其支撐腿執(zhí)行機構使用交流伺服電機驅動的電動推桿。本文的研究基于該類型雷達車,采用基于角度誤差的調平控制方法[5],設計一種調平控制策略和控制流程,控制策略中引入電機電流進行“虛腿”的補償控制,通過機電聯(lián)合仿真手段驗證該方法的調平性能。
1 問題描述
車載四點機電調平系統(tǒng)的俯視簡圖如圖1所示。支腿按照矩形布置,編號如圖所示。圖中a,b分別為矩形沿y軸和x軸方向的邊長,a0,b0為系統(tǒng)重心距離矩形邊的距離。圖中所示的坐標軸固定于平臺之上,定義平臺先繞x軸的轉角為α,在該姿態(tài)下再繞y軸的轉角為β。
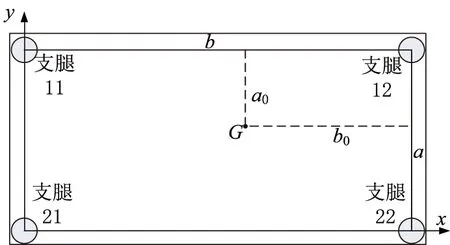
圖1 車載四腿調平系統(tǒng)簡化示意圖
初始時刻,雷達車停在傾斜的地面上,由其輪胎支撐。本文的任務是設計一種控制策略,將平臺調節(jié)至水平狀態(tài),且使得4個支腿的支撐力分布均勻。
2 調平控制策略與虛腿補償控制設計
2.1 支撐力測量
為了防止出現(xiàn)“虛腿”且使得調平后各支撐腿受力均勻,控制策略中必須包含支撐腿的支撐力。這里不使用力傳感器直接測量支腿的支撐力,而是通過伺服電機繞組等效電流來估計支撐力大小。
絲桿螺母的受力圖可以展開成平面問題(如圖2所示),三角楔形表示螺紋,螺桿的推力等效于作用在螺紋面的力,表示成g,三角楔形向左移動(假設此時伺服電機正轉),則螺桿上升,反之則下降。圖2中,g為螺桿作用在螺紋面上的壓力;gv為g在垂直于螺紋面上的壓力分力;gh為g在平行于螺紋面上的壓力分力;f為作用在三角楔形上的水平推力,用于在半徑為r的力臂上產生螺桿扭矩;p為 螺桿螺距;r為 螺桿半徑;θ為 螺紋螺旋角。
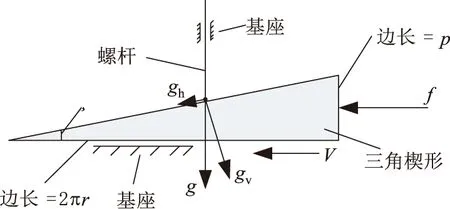
圖2 螺紋面受力圖
假設螺旋副接觸面的摩擦系數(shù)為μ,三角楔形與基座的摩擦系數(shù)為0。容易證明當μ>tanθ時,令f=0,該機構能自鎖,電動支腿具有自鎖功能,因此這里默認μ>tanθ來說明兩種情況下f與g的關系。
(1) 三角楔形勻速向左移動時(按照假設,此時螺桿上升,伺服電機正轉),滿足

(1)
(2) 三角楔形勻速向右移動時(按照假設,此時螺桿下降,伺服電機反轉),滿足

(2)
式中C為常量,為螺旋傳動的靜摩擦力。可見,電動支腿處于靜止狀態(tài)時不能從支腿電流來估計支撐力的大小。但是,當支腿運動時,如果C所占的份額較小以致可以忽略其影響時,推力f與g成正比,f與伺服電機繞組等效電流成正比[6],因此可以通過檢測低速運行時的繞組電流來估計支撐力的大小。這里不加證明地使用式(1)估計。事實上,為了使載車平臺在水平狀態(tài)時不產“虛腿”且合理分布各支腿的支撐力,這里不需要計算支撐力大小,只要在低速運行時使各電機繞組電流達到理論值的一個給定鄰域即可。
2.2 支撐力優(yōu)化計算
按照圖2所示,各支撐腿螺桿作用在螺紋面上的壓力用gij(i=1,2;j=1,2)表示,作用在三角楔形上的水平推力用fij(i=1,2;j=1,2)表示,相應的伺服電機繞組電流用Iij(i=1,2;j=1,2)表示,當支撐腿將輪胎抬離地面并低速運行時滿足式(1),進而有
(3)

(4)
聯(lián)合式(3)和式(4)得
(5)
式(5)的超靜定問題有4個變量3個方程,因此解不是唯一的,優(yōu)化解滿足變形協(xié)調方程,該方程為
(6)
式(5)~式(6)的解是存在且唯一的。

(7)
方程組式(7)的解是容易得到且唯一的。
2.3 調平控制流程
調平系統(tǒng)的調平分兩個階段:第一階段是雷達車就位后,4條支撐腿伸長,使輪胎脫離地面;第二階段是調平。調平控制流程如圖3所示,描述如下:
(1) 通過伺服電機帶動支撐腿以較高速度向下移動,當伺服電機電流驟然增大至給定閾值后,判定該條支撐腿觸地,則停止相應伺服電機轉動,當4個支撐腿均觸地后,進行步驟2;
(2) 低速伸展4條支撐腿,將輪胎抬離地面,檢測繞組電流并按照式(7)計算調平后各伺服電機的優(yōu)化繞組電流值,進行步驟3;
(3) 根據(jù)狀態(tài)反饋量(載車平臺姿態(tài)、電機軸位置、速度和繞組電流)進行調平,至載車平臺處于水平狀態(tài),且各支撐腿伺服電機繞組電流達到優(yōu)化值的一個鄰域內。

圖3 調平控制流程
2.4 調平控制策略
本文的調平系統(tǒng)采用最高點不動法和角度誤差調平控制相結合的控制策略進行雙向調平;支腿的運動基于比例控制,引入支腿電流進行虛腿的補償控制,最終保證載車平臺處于水平狀態(tài),無虛腿(超靜定問題的一組優(yōu)化解),且滿足系統(tǒng)的其他設計指標。
支腿伺服電機工作在速度環(huán),用Vcmdij表示對應支腿伺服電機的速度指令,控制器設計為
3 機電聯(lián)合仿真與結果分析
3.1 仿真模型說明
仿真采用Adams+Matlab/Simulink進行。首先,分別在Adams軟件和Matlab軟件中建立調平系統(tǒng)的機械系統(tǒng)模型和執(zhí)行機構的數(shù)學模型;然后,分別在Adams軟件和Matlab軟件中建立機械系統(tǒng)和控制系統(tǒng)之間的傳遞變量;最后,在Matlab軟件中編寫調平控制策略并進行機電聯(lián)合仿真。
在Adams中建立雷達車調平系統(tǒng)的機械模型(如圖4所示),主要包括載車平臺、地面和4組支撐腿子系統(tǒng)。在載車平臺輪胎與地面、支撐腿與地面之間建立接觸關系。支撐腿子系統(tǒng)采用交流伺服電機通過減速器帶動支撐腿螺母轉動,進而實現(xiàn)支撐腿伸展。當支撐腿接觸地面后,平臺姿態(tài)將根據(jù)模型的幾何關系進行調整。

圖4 雷達車調平系統(tǒng)在Adams中的機械模型
在Matlab/Simulink中建立交流伺服電機仿真模型[7]。將Adams中所建立的機械模型與Matlab/Simulink中建立的伺服電機模型在Matlab/Simulink中集成,建立機電聯(lián)合仿真模型,其原理圖如5所示。交流伺服電機數(shù)字模型與雷達車的Adams機械模型之間通過變量傳遞系統(tǒng)狀態(tài)和控制指令,在S-函數(shù)中編寫調平的控制策略。
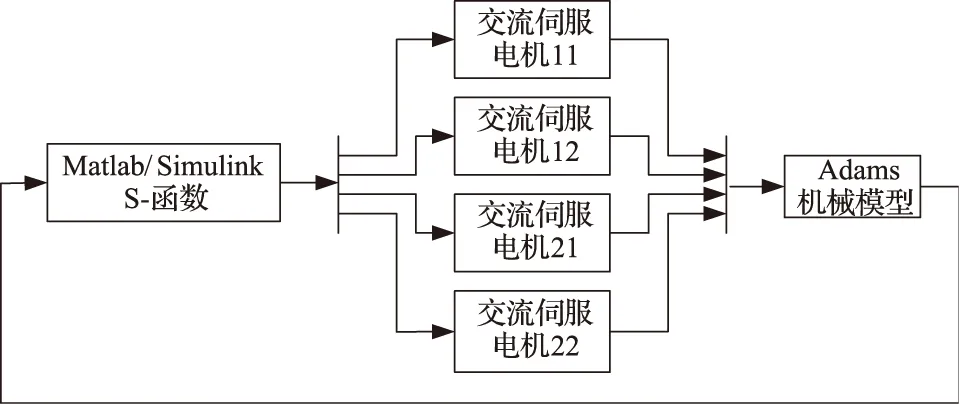
圖5 雷達車調平系統(tǒng)機電聯(lián)合仿真原理圖
3.2 結果與分析
如圖4所示,初始時刻,地面處于水平狀態(tài),雷達車由車輪支撐置于地面并處于水平狀態(tài)。首先使地面繞x軸旋轉2°,繞y軸旋轉1°,使得雷達車隨著地面姿態(tài)發(fā)生變化,然后進行調平控制。
仿真結果如圖6~圖7所示。圖6是雷達車繞x軸和y軸的傾角變化曲線。圖7是雷達車4個支撐腿的受力曲線。0~2s的時間內雷達車繞x軸和y軸的姿態(tài)隨地面發(fā)生變化,分別傾斜2°和1°;t=2s時開始調平,4個支撐腿同步伸展,支撐腿11首先接觸地面并停止運動。這從圖7中支撐腿11受力曲線在t=14s時的變化可以看出來。同時,圖6中平臺繞兩個軸的傾角也發(fā)生微小變化。t=70s時所有支腿開始接觸地面,然后開始調平。t=130s時完成調平,雷達車處于水平狀態(tài),且4個支撐腿的受力均較大,消除了“虛腿”。
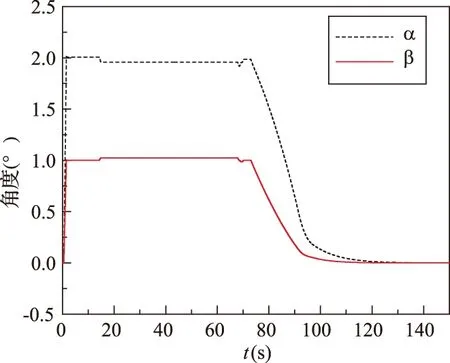
圖6 x軸(α)和y軸(β)傾角變化曲線
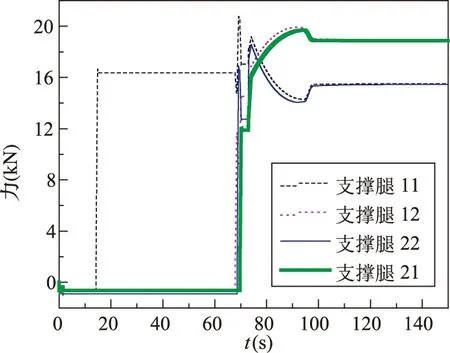
圖7 支撐腿受力曲線
4 結束語
針對四點機電調平系統(tǒng)的“虛腿”現(xiàn)象,本文設計了一種基于伺服電機電流的“虛腿”補償控制策略,并通過機電聯(lián)合仿真驗證了所設計控制策略的有效性。在分析四點機電調平系統(tǒng)的幾何特性和受力特性的基礎上,計算了調平后各撐腿支撐力的優(yōu)化解,提出了一種通過伺服電機繞組電流估算支撐力的方法。最后設計了一種基于角度誤差的雙向調平控制策略,在其中引入了“虛腿”補償電流反饋控制策略,并通過機電聯(lián)合仿真驗證了該控制策略的有效性。仿真結果顯示,雷達車沿兩個軸的傾角漸近收斂至0點,且4個支撐的受力分布較均勻,消除了“虛腿”。
[1] 萬其.雷達載車雙閉環(huán)調平系統(tǒng)設計[C]//中國電子學會電子機械工程分會2007年機械電子學學術會議論文集,2007.
[2] 凌軒.雷達天線車自動調平系統(tǒng)設計[J].液壓與氣動,2008(4):1-4.
[3] 盧朝雙.高精度機電式車載雷達平臺調平控制系統(tǒng)的研發(fā)[D].電子科技大學碩士學位論文,2007.
[4] 程玉清.雷達天線車全自動機電調平系統(tǒng)研究與設計[D].南京理工大學碩士學位論文,2007.
[5] 韓洋洋.冷發(fā)射裝置結構動力學試驗平臺的調平系統(tǒng)設計與仿真研究[D].南京理工大學碩士學位論文,2007.
[6] 陳威.一類雙電機同步驅動伺服系統(tǒng)的高性能控制策略研究[D].南京理工大學博士學位論文,2014.
[7] 莊文許.基于內模原理的某艦載火箭炮操瞄系統(tǒng)控制研究[D].南京理工大學博士學位論文,2013.
Weak leg compensation strategy and electromechanical jointsimulation for a four-leg electromechanical leveling system
SHU Ya-hai1, ZHUANG Wen-xu2, LI Ke-xiang2, YANG Meng2
(1.Military Representatives Office of the PLA in Jiangnan Shipbuilding (Group) Co.,Ltd.,Shanghai 201913;2. No.724 Research Institute of CSIC, Nanjing 211153)
In view of the leveling and "weak leg" problem of the four-leg electromagnetic leveling system of the radar vehicle, the optimal solution is given for the supporting force of each leg after the leveling through the analysis of the geometrical and mechanics characteristics of the leveling system, and a method of using the winding current of the servo motor to estimate the supporting force is proposed. A "weak leg" compensation control strategy is designed based on the relationship between the optimal solution and the winding current, making each leg bear proper force during and after the leveling, to avoid "weak leg" and improve the safety of the radar vehicle. The effectiveness of the control strategy designed is verified via the electromechanical joint simulation.
radar vehicle; electromechanical leveling system; weak leg; joint simulation.
2016-12-22;
2017-01-10
舒亞海(1976-),男,工程師,研究方向:信號與信息處理技術;莊文許(1985-),男,高級工程師,博士,研究方向:機電系統(tǒng)設計;李珂翔(1986-),男,高級工程師,碩士,研究方向:雷達結構設計;楊猛(1991-),男,助理工程師,碩士,研究方向:雷達結構設計。
TN959.71
A
1009-0401(2017)01-0055-05
猜你喜歡
工業(yè)設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
能源工程(2020年6期)2021-01-26 00:55:22
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
山東冶金(2019年3期)2019-07-10 00:54:04
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
消費導刊(2018年10期)2018-08-20 02:57:02
家庭影院技術(2017年9期)2017-09-26 03:41:45
通信電源技術(2016年1期)2016-04-16 04:57:26
