一種基于遙感的快速提取建筑物高度的方法
2017-03-30 08:05:02劉同華景文博姜淑華
科技創新導報 2016年31期
劉同華++景文博++姜淑華
摘 要:針對傳統的提取建筑物高度方法過程復雜、參數過多且不易獲得的不足,提出了一種快速、簡便提取建筑物高度的方法。首先對原始遙感影像進行圖像預處理,然后用K-平均算法進行聚類分析得到陰影和建筑物區域;并對提取的陰影進行腐蝕、膨脹等操作,以此來增加陰影的邊緣信息;最后實地測量建筑物高度與陰影長度,根據兩者之間的幾何映射關系,提取建筑物的高度。結果表明:對比傳統的建筑物高度提取方法,該方法不僅簡單快速,而且精度達到1.5 m以內,從而為大規模建筑物群的高度提取提供了一種快速、便捷、有效的方法。
關鍵詞:遙感影像 K-平均算法 數學形態學 建筑物高度
中圖分類號:TP79 文獻標識碼:A 文章編號:1674-098X(2016)11(a)-0087-02
城市化發展包含了城市水平空間和垂直空間上的發展,而建筑物作為城市中最重要的組成部分,其高度的變化正是城市化垂直空間的體現。目前,隨著光學敏感元件的高精密集成技術,遙感影像分析精度的日益提升,因此,遙感影像得以廣泛應用。何國金[1]等人也進行建筑物高度的估算,針對北京市蜂窩電話網的布點建設要求進行高度分級,并生成不同建筑物高度的分布圖,通過驗證結果準確率達到80%以上。以上方法雖然都對建筑物高度的提取提供了有效的方法,但過程相對復雜,必須提前獲知太陽及衛星的各種角度。在未知太陽和衛星的各種角度以及大批量處理數據時,使用這些方法誤差較大。
為了實現快速、精準、有效地評價建筑物群的高度信息,該文使用“高分一號”遙感影像數據提取建筑物高度。首先對原始影像進行預處理,其次利用K-平均算法聚類分析得到建筑物以及陰影區域;然后對陰影進行腐蝕膨脹等處理,獲取準確的陰影長度,通過其長度計算出建筑物的高度。該方法無需提前獲知太陽及衛星的各種角度信息,操作便捷,提取方法快速、精準,克服了獲取衛星遙感信息所帶來的困難。
1 建筑物與陰影的提取
針對建筑物群的在遙感影像中的實際成像特點,我們可以得到,通過獲取的陰影信息來提取建筑物高度是該文的關鍵。由于原始影像成像時會受到大氣湍流、電磁波輻射等影響,導致遙感影像存在不同程度上的畸變、失真以及模糊等現象[2]。因此在提取建筑物和陰影之前首先對遙感影像進行一定程度上的預處理操作,便于后續的影像圖像信息處理。然后利用K-平均算法分割出建筑物與陰影區域,并對陰影進行數學形態學處理,使邊緣自然平滑。流程圖如下:
1.1 K-平均算法分割建筑物陰影
遙感影像預處理消除噪聲和畸變后,采用K-平均聚類算法[3]對建筑物和陰影進行分割。K-平均算法的根本思路就是把個數據處理對象根據他們的屬性分為個分割。
其中,數據和之間的歐幾里得距離為,表示簇類個數,公式如下:
(1)
同一簇類的中心點表示為,公式如下:
(2)
聚類準則函數定義如下:
(3)
為所有對象的誤差平方和,為空間中的任意一點,為聚類的期望值。
1.2 基于數學形態學的陰影處理
通過K-平均算法得到的陰影邊界有鋸齒化現象和由于遮擋等因素某些地方出現孔洞或斷點。因此利用數學形態學腐蝕、膨脹平滑陰影和建筑物邊界、填補孔洞和斷點。
腐蝕是指遍歷圖像的每一個像素,利用模板與覆蓋的二值圖像區域進行邏輯“與”運算。
對于集合對象和,集合被集合腐蝕,用表示,定義公式如下:
(4)
膨脹是指遍歷圖像的每一個像素,利用模板與覆蓋的二值圖像區域進行邏輯“或”運算。由于和是中的集合,被膨脹定義為:
(5)
首先對建筑物陰影區域進行腐蝕,消去影像中孤立點和陰影對象邊緣的點,然后對腐蝕后的陰影區域進行膨脹處理[4],填充因遮擋或其他原因引起的孔洞。因此,我們可以得到較為清晰的影像信息。
2 陰影長度與建筑物高度的關系
一般情況下,我們無法獲知遙感影像拍攝時的時間,因此我們也無法獲取太陽、衛星的各種角度信息。但是我們從衛星成像和陰影形成原理得出,在同一時間拍攝的遙感影像上,陰影長度和建筑物高度的比值是固定的,公式如下:
(6)
式中,為同一時刻下所拍攝的建筑物高度與陰影長度之間的比值。因此,根據公式我們可以得知,通過實際測量任一棟建筑物的高度信息以及所對應的陰影長度,根據兩者之間的映射關系即可獲得值。
根據遙感影像中建筑物高度與陰影長度的映射關系。實驗人員在實驗區任意選擇一棟建筑物進行測量。其建筑物的高度為27.75 m,通過軟件獲得陰影在圖像上占18.45個像素。由公式(6)可求出值為 1.504,則公式可以修改為:
(7)
3 實驗結果及分析
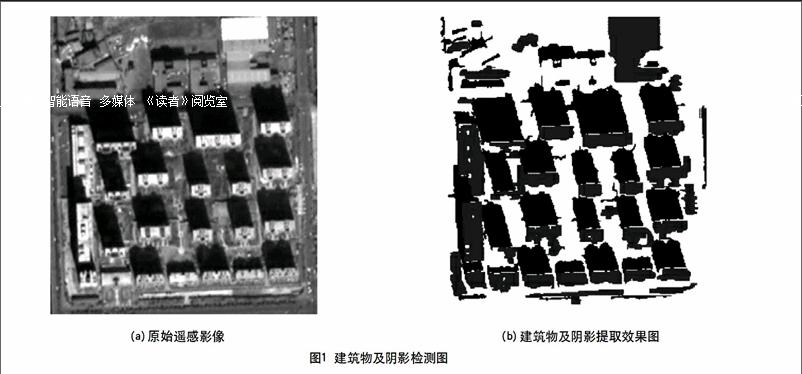
為了更好地驗證算法的準確性,同時和其他文獻中的處理結果進行比較,該文實驗中使用的測試影像為“高分一號”遙感影像,選取吉林某家屬院為實驗區進行對其高度進行提取。圖1所示兩幅圖像分別為原始影像以及提取后的建筑物和陰影檢測圖。利用公式(7)對實驗區中的任意10棟建筑物進行實驗驗證,其精度達到1.5 m以內。
4 結語
在城市化進程中,為了解決大規模城市建筑物提取時間長、計算量大等問題。該文提出了一種快速、準確提取建筑物高度的方法。通過實驗結果分析得出,對比傳統的建筑物高度提取方法,該方法不僅簡單快速,而且精度達到1.5 m以內,該方法滿足了大規模城市建筑物群高度的提取要求,具有一定的社會應用價值。
參考文獻
[1] 何國金,陳剛,何曉云,等.利用SPOT圖象陰影提取城市建筑物高度及其分布信息[J].中國圖象圖形學,2001, 6(5):425-428.
[2] 王昱,張廣友,等.衛星遙感影像預處理中噪聲去除方法的研究[J].遙感技術與應用,2007,22(3):455-459.
[3] 馮超.K-means聚類算法的研究[D].遼寧:大連理工大學,2007.
[4] 余婧峰,余銀普.規范化城市建筑物陰影提取及校正模型研究[J].遙感技術與應用,2014,29(1):172-175.
