10 kV配電網饋線自動化的實用化研究
2017-03-30 02:14:52李德科
科技與創新 2016年23期
關鍵詞:智能控制
李德科
摘 要:饋線自動化能夠實現對線路故障的自動定位與隔離,并恢復正常線路的供電。這對減少配電網故障停電時間,提高供電可靠性具有重要意義。根據對故障進行隔離以及恢復供電的方式的不同,可將饋線自動化分為就地控制、集中控制和智能控制等模式。分析了各種饋線自動化的工作原理及優缺點,總結了各種模式的應用場合。
關鍵詞:饋線自動化;就地控制;集中控制;智能控制
中圖分類號:TM76 文獻標識碼:A DOI:10.15913/j.cnki.kjycx.2016.23.154
饋線自動化能對線路正常狀態以及事故狀態進行監測,同時還具有四遙、自動投切電容器組等功能。最重要的應用是,10 kV配電網饋線自動化能在線路發生故障后,對故障進行自動定位,并將故障區域隔離開,恢復正常區段的供電,以降低故障停電對用戶的影響。根據對故障進行隔離以及恢復供電的方式,饋線自動化模式往往不一樣。本文對各種饋線自動化模式的特點進行研究,并對其實用性進行總結。
1 配電網饋線自動化的模式
1.1 饋線自動化就地控制模式
就地控制模式指的是對故障采取就地處理的方式,它采集就地電流、電壓的變化,由重合器或分段器根據設定的邏輯依次動作,實現了對故障的判斷與隔離,并恢復正常線路的供電。在整個處理過程中,就地控制模式不需要主站系統的控制。
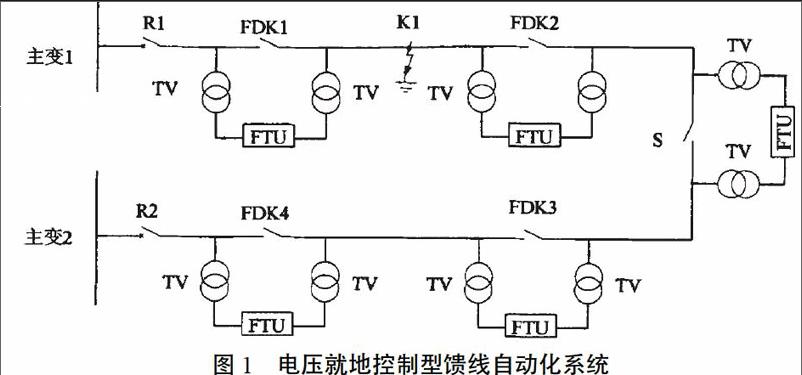
圖1為電壓就地控制型饋線自動化系統。電壓就地控制型以手拉手環網為例,S為聯絡開關,通常處于斷開狀態。當檢測到聯絡開關S一側帶電而另一側失電,則經一定時限后閉合。該時限要足夠長,躲過線路上重合器、分段器動作時間。聯絡開關S閉合后,為失電側線路的故障點下游非故障區段恢復供電。具體動作過程為:如果K1點發生永久性故障,重合器R1首先跳開,線路1斷電,FDK1、FDK2跳開。經延時后R1重合,再經延時t1后,FDK1合閘于故障K1,立即斷開并閉鎖,不再重合。經一段時間后R1再次重合,R1與FDK1之間線路恢復供電,而FDK1至聯絡開關S段失電。當聯絡開關S檢測到線路1側沒有電壓而線路2側有電壓,經延時后合閘。隨后經延時t1后FDK2合閘于故障K1,FDK2、FDK3、FDK4、R2跳閘。其中,FDK2閉鎖不再合閘,R2、FDK3、FDK4經延時后依次合閘,FDK2至R2段線路恢復供電。而FDK1、FDK2都斷開,將故障K1隔離開。采用這種方式可能導致聯絡開關另一側正常線路短時停電。
1.2 集中控制型饋線自動化模式
集中控制型饋線自動化模式是主站/子站通過通信系統集中收集饋線終端FTU檢測到的故障信息,啟動故障處理程序,對故障進行識別與定位以及隔離控制的。整個過程包含了主站/子站、通信網絡和FTU 3個環節。以架空環網為例對集中控制型饋線自動化模式動作原理進行闡述。當K1點發生永久性接地故障時,R1斷開并重合于故障再次跳開,主站收到故障檢測信號啟動故障處理程序。FDK1處的FTU檢測到故障電流,而FDK2處的FTU沒有檢測到故障電流,主站判斷接地點在FDK1與FDK2之間,通過自動或手動遙控將FDK1、FDK2斷開,故障點K1被隔離。最后合上聯絡開關S,非故障線路段都恢復正常供電。這種模式對故障定位準確,不需重合器多次重合,對電網沖擊小,但要增加通信網絡方面的投資。
1.3 智能控制模式
傳統饋線自動化對故障的處理時間在分鐘級,而采用點對點對等通信技術,能在數秒時間內完成故障的處理。它的工作原理為:將重合器R以及FTU都接入以太網,向配網自動化主站發送所有檢測信息。某一FTU檢測到故障電流后,主動向相鄰FTU發送故障信息,同時請求相鄰FTU檢測信息。每個FTU將自身檢測信息與相鄰FTU的檢測信息進行對比,從而定位出故障,并做出故障隔離、恢復供電的控制策略。故障處理完成后,FTU將處理信息發送給主站/子站,整個故障處理過程中不需要主站/子站的參與。這種方式處理時間快,有利于提高供電可靠性。由于只使用自身以及相鄰FTU的檢測信息,不需知道整個配網的拓撲結構,對FTU進行整定配置較為簡單。同時,這種控制模式對通信要求較高,造價不低,相信隨著技術的發展以及成本的降低,這種智能控制模式會有較好的發展前景。
2 總結
饋線自動化就地控制模式不需要通信,投資相對較小,可靠性高,實施方便,主要應用于對供電可靠性要求不高、通信條件不好的配電線路。但由于電纜線路不允許重合,因此這種模式只能應用于架空線路。集中控制型饋線自動化模式能對線路運行狀態進行監控,不需要重合器進行多次重合來配合隔離故障,因此不會對電網造成沖擊,同時適用于架空線路和電纜線路;不足之處在于,這種模式需要建設通信通道,投資較大,主要適用于對供電可靠性較高的地區。智能控制饋線自動化模式采用終端與終端之間使用對等通信網絡交換數據,能夠實現快速故障處理,適用于重要負荷的線路,雖然目前應用得不多,但相信隨著技術的發展會逐漸被推廣使用。
參考文獻
[1]王哲,葛磊蛟,王浩鳴,等.10 kV配電網饋線自動化的優化配置方式[J].電力系統及其自動化學報,2016,28(3):65-70.
[2]張偉,徐士華.一種提高分布式饋線自動化故障判定可靠性方法[J].電力系統保護與控制,2013(22):122-127.
[3]劉健,張小慶,張志華,等.配電網兩相接地短路故障定位與供電恢復[J].電力系統自動化,2013,37(5):105-110.
[4]劉健,張小慶,趙樹仁,等.配電自動化故障處理性能主站注入測試法[J].電力系統自動化,2012,36(18):67-71.
〔編輯:劉曉芳〕
猜你喜歡
卷宗(2016年10期)2017-01-21 15:33:38
科技創新與應用(2016年34期)2016-12-23 16:04:06
科技創新與應用(2016年34期)2016-12-23 09:52:55
電子技術與軟件工程(2016年20期)2016-12-21 11:36:49
電子技術與軟件工程(2016年20期)2016-12-21 11:00:56
計算機教育(2016年10期)2016-12-19 12:15:52
演藝科技(2016年10期)2016-11-26 22:11:21
科學與財富(2016年28期)2016-10-14 04:41:37
科技視界(2016年4期)2016-02-22 19:51:01
