
一種微型四軸飛行器設計
2017-03-31 15:02:22劉洋楊潤豐
科技資訊 2016年32期
劉洋++楊潤豐
摘 要:伴隨著多旋翼飛行器技術的日益成熟,四軸飛行器因具有結構簡單、能耗低、體積小等優點,得到廣泛應用。該文旨在設計一種采用STM32芯片作為主控芯片,以運動傳感器MPU6050作為姿態傳感器,通過2.4G無線通信模塊與遙控板進行通信,使用PID控制算法通過PWM方式驅動空心杯電機實現遙控控制的微型四軸飛行器。該飛行器采用一體化設計,結構簡單,制作方便,可以作為四軸飛行器的科普學習及STM32學習平臺。
關鍵詞:四軸飛行器 STM32 MPU6050 飛行控制
中圖分類號:TH112 文獻標識碼:A 文章編號:1672-3791(2016)11(b)-0052-02
近年來,伴隨著無人技術的發展,多旋翼飛行器技術日益成熟,多旋翼飛行器不受起飛著陸場地限制,能垂直起降、空中懸停,能向任何一個方向靈活飛行等特點,使其被廣泛應用于各個領域。大疆等航拍飛行器的出現以及植保無人機的應用更是將四軸飛行器技術帶入千家萬戶,越來越多的人接觸并應用四軸飛行器。四軸飛行器技術的快速發展及應用普及,使得無人飛行器飛手及維修維護人員的匱乏問題日益顯現。該文提出了一種微型四軸飛行器設計方案,該微型四軸飛行器采用STM32芯片作為主控芯片,以運動傳感器MPU6050作為姿態傳感器采集飛行器狀態信息,并通過2.4G無線通信模塊與遙控板進行通信,飛行器結合飛行狀態信息及接收的遙控信號,使用PID控制算法通過PWM方式驅動空心杯電機實現遙控控制。通過該微型四軸飛行器的設計制作,可以深入了解四軸飛行器的飛行控制原理,為四軸飛行器的應用與開發奠定基礎。
1 四軸飛行器的結構與原理
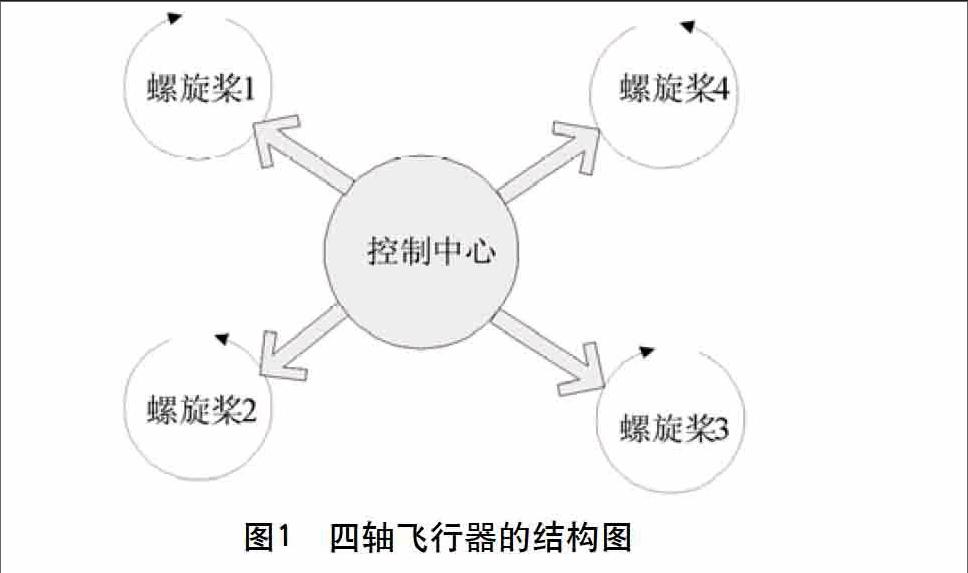
四軸飛行器屬于多旋翼飛行器,與直升機不同,它由4個旋翼組成,而且4個旋翼都是電機直連的簡單機構,通過控制這4個旋翼的轉速,來實現飛行器的前進、后退、轉向和旋轉等動作。其結構圖如圖1所示。
如圖1,四軸飛行器主要包括:旋翼部分、飛行控制部分及機身3部分,其中旋翼固定在機架的4個軸的末端,為整個飛行器提供動力,它包括螺旋槳(正、反槳)、電機以及一些固定部件;飛行控制部分固定在機架的中心,用于飛行器姿態信息的處理及姿態控制,其中包括主控模塊、遙控接收模塊、傳感器模塊等;機架是飛行器的基礎平臺,旋翼模塊、飛行控制模、電源等都要安裝在機架上面。機架的大小直接決定了飛行器的大小,作為微型四軸飛行器,為了減小飛行器的體積及重量,一般采用一體化設計。
2 硬件設計
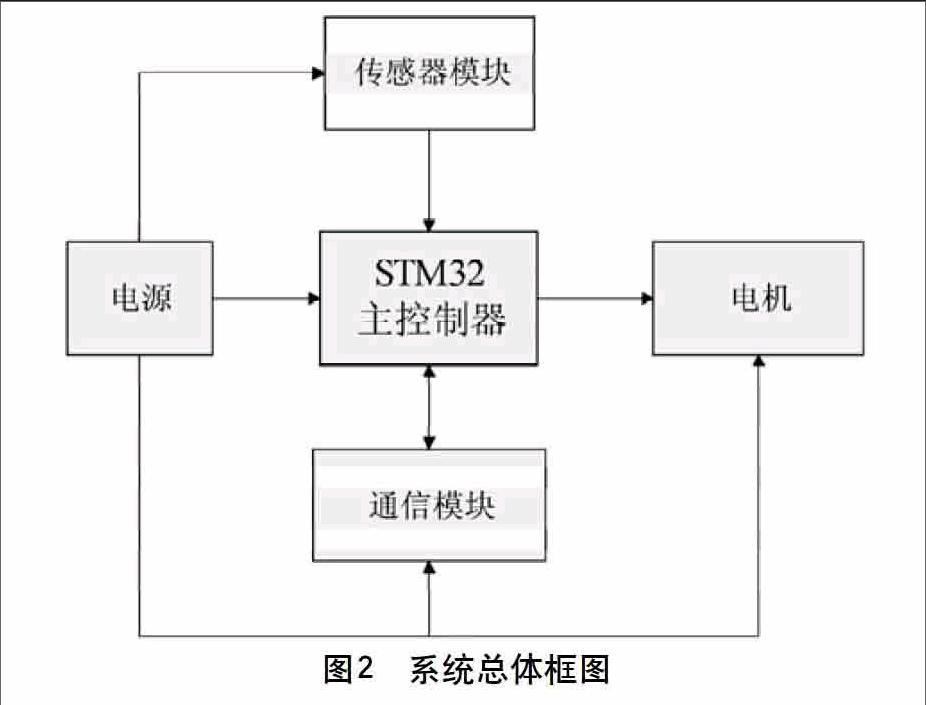
四軸飛行器通過改變其4個螺旋槳的拉力的大小及方向可以實現前進、后退等簡單動作,要想實現飛行器的穩定多姿態控制,則需通過姿態傳感器獲取信息,經主控制器進一步運算處理實現。基于以上設計思路,該設計系統框圖如圖2所示。
如圖2所示,該控制系統主要包括STM32主控制器、電源模塊、空心杯電機、通信模塊及傳感器模塊5部分。
2.1 主控電路
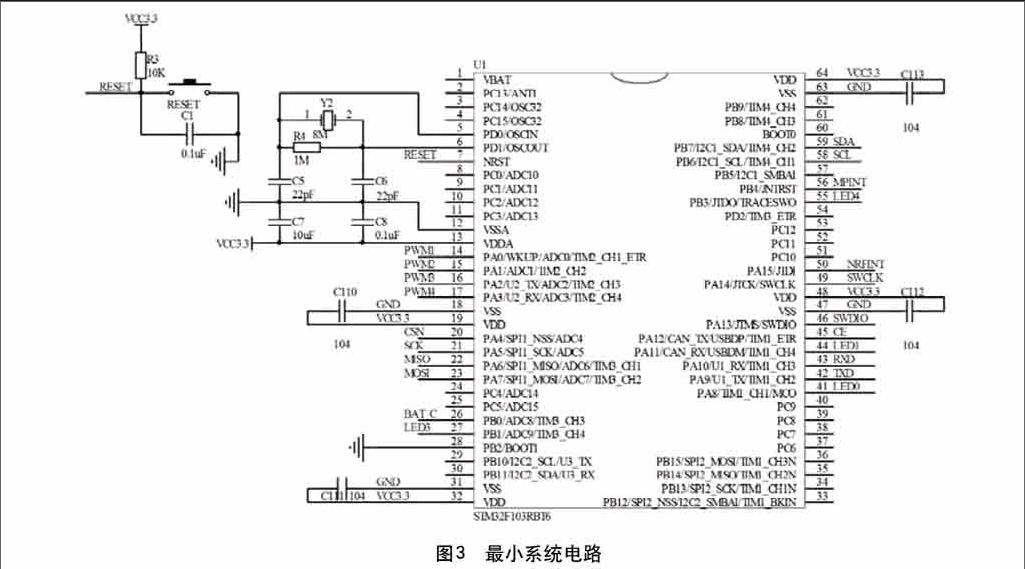
主控制器,作為四軸飛行控制系統的核心,主要功能是接收遙控控制信號,將當前飛行姿態信息與目標姿態信息進行比較,通過控制算法,計算出各電機PWM脈沖占空比值輸出至電機,實現飛行控制。考慮到STM32學習的方便,該設計選用STM32F103作為主控芯片,最小系統電路如圖3所示[3]。
2.2 傳感器模塊
傳感器模塊選用MPU6050傳感器作為姿態傳感器,用于測量飛行器的空間加速度與角速度信息,測量數據經主控制器預算后,通過PWM控制各電機轉速,進而實現運動控制。
2.3 通信模塊
要實現四軸飛行器的飛行遠程控制,需要四軸飛行器和遙控端進行無線通信,考慮成本及設計的簡化,該設計采用NRF24L01作為無線通信模塊,設計制作四軸飛行器遙控終端。
2.4 電源模塊
電源模塊為整個系統供電,該設計的電源模塊采用較為輕便的5 V小型鋰電池作為電源,經LM1117-3.3V穩壓電路實現微控制器、無線通訊模塊、傳感器模塊的供電。
3 軟件設計
軟件設計作為四軸飛行器設計的重要組成部分,直接影響到飛行器飛行控制的穩定與可靠。四軸飛行器的軟件設計主要由STM32主控制器的程序設計及遙控終端的程序設計兩部分組成。
STM32主控制器主要功能是接收無線信號、處理傳感器信息及控制電機轉速,其處理流程首先是初始化無線通信模塊、傳感器模塊和電機,然后獲取姿態信息并對整個系統進行校準,隨后進入待機狀態等待解鎖控制信號的傳入。主控制器采用定時器中斷的方式,在中斷中進行對時間的處理,每次中斷計次標志就會自增,根據不同的中斷積累分別處理優先級不同的任務。主控制器工作時每0.5 ms中斷一次,每次中斷都會檢查一次無線模塊數據的接收,確保飛控系統控制信息的實時性;每兩次中斷讀取一次傳感器模塊數據,獲取的數據通過卡爾曼濾波算法獲得較為準確的飛行器姿態數據;每4次中斷(即2 ms)通過濾波算法獲取的姿態數據計算四軸飛行器的姿態,然后結合遙控終端的目標姿態,根據兩者的差值通過PID控制算法計算出各電機PWM值,對各個電機進行調速控制[1]。
該設計設計的遙控器,主要用于飛行器的簡單控制,遙控板將操作人員的操作動作轉化成信號傳給飛行控制板,實現飛行器的遠程控制。
4 結語
該文設計實現一種微型四軸飛行器系統,該四軸飛行器采用STM32芯片作為控制芯片,以運動傳感器MPU6050作為姿態采集傳感器,通過2.4G無線模塊與遙控終端通信,并通過PID控制算法得出電機PWM驅動值來實現飛行控制。系統結構簡單,易于實現,可用于初學者及愛好者入門體驗學習。
參考文獻
[1]常國權,戴國強.基于STM32的四軸飛行器飛控系統設計[J]. 單片機與嵌入式系統應用,2015(2):29-32.
[2]鮑凱.玩轉四軸飛行器[M].北京:清華大學出社,2015.
[3]劉軍.例說STM32[M].北京:北京航空航天大學出版社,2011.
