汽車發動機怠速穩定性模糊控制系統試驗研究
2017-03-31 04:10:56劉鯊張振東尹叢博程強
能源研究與信息 2016年4期
關鍵詞:發動機
劉鯊++張振東++尹叢博++程強

摘要: 怠速工況運行品質是影響汽車發動機的經濟性和排放性能的重要因素.在完成目標發動機噴油、點火系統控制匹配的基礎上,以提高怠速運行穩定性為目標開發了怠速模糊控制器,編寫了輸入變量的模糊化、模糊推理過程以及模糊輸出量的精確化等控制軟件.采用模糊控制可以避免因汽車發動機怠速運行工況復雜造成難以建立精確數學模型,且可在發動機怠速工況時對轉速進行較好的控制.發動機臺架試驗結果表明,采用模糊控制能有效改善汽車發動機的怠速運轉穩定性,怠速運行質量顯著提高.
關鍵詞:
汽車發動機; 怠速轉速; 運轉穩定性; 模糊控制
中圖分類號: V 433文獻標志碼: A
怠速工況是汽車發動機的重要工況之一,是指發動機在保持節氣門全關而維持平穩運行的最低轉速.汽車在城市道路中行駛時會頻繁處于怠速工況.由于怠速工況下發動機不對外輸出功率,怠速轉速低有利于節省燃油消耗,但怠速轉速過低時由于缸內殘余廢氣增加易造成燃燒不穩定,導致有害排放物大幅增加.目前,為了使汽車發動機同時滿足燃油經濟性和排放法規的要求,一般采用較高的怠速目標轉速.另外,發動機處于怠速工況運行時,還會受到空調、動力轉向泵等突加載荷的影響,使怠速轉速發生較大變化,造成燃油經濟性降低或排放性能惡化.因此,如何實現怠速轉速的穩定控制是汽車發動機控制系統需要解決的關鍵問題之一[1].
汽車發動機怠速轉速的經典控制方法是采用PID(比例積分導數)控制,但由于發動機具有顯著的非線性、時變性等特點,使得參數處理工作量巨大,而且在受到突加載荷作用時,易出現較大的控制超調.為了對怠速轉速進行更理想的控制,國內外很多學者研究了模糊控制、神經網絡及滑模控制等方法對汽車發動機怠速的控制效果[2];結果顯示,上述控制方法相對于傳統PID控制具有更好的怠速穩定性控制效果.但上述研究大都基于復雜的理論分析或計算仿真,尚需從實際控制系統的角度對其控制的可行性和有效性進行驗證.本文以桑塔納AFE電噴發動機為對象,借助80C196單片機開發了試驗用發動機控制系統,利用模糊控制方法對怠速旁通空氣量和點火提前角進行實時調節,實現了怠速穩定性的控制,并通過試驗驗證了模糊控制方法的有效性.
1試驗用發動機控制系統
自行開發的發動機怠速控制系統結構如圖1所示,主要包括傳感器及信號處理系統、控制單元、執行機構及驅動電路等.該系統使用檢測凸輪軸位置、曲軸位置、冷卻液溫度、進氣溫度、進氣壓力、排氣含氧量的傳感器監控發動機的工況信息.上述信號經信號處理系統濾波、電平轉換處理后輸入控制單元;控制單元以80C196單片機為核心構建,對輸入的各種工況信息進行運算處理,生成噴油時刻、點火以及怠速旁通閥控制信號;執行機構包括噴油器、點火線圈初級電路以及怠速旁通閥三種;驅動電路對控制單元的控制信號進行功率放大,實現噴油定時、點火定時以及怠速旁通閥開度的有效控制.
1.1噴油定時控制
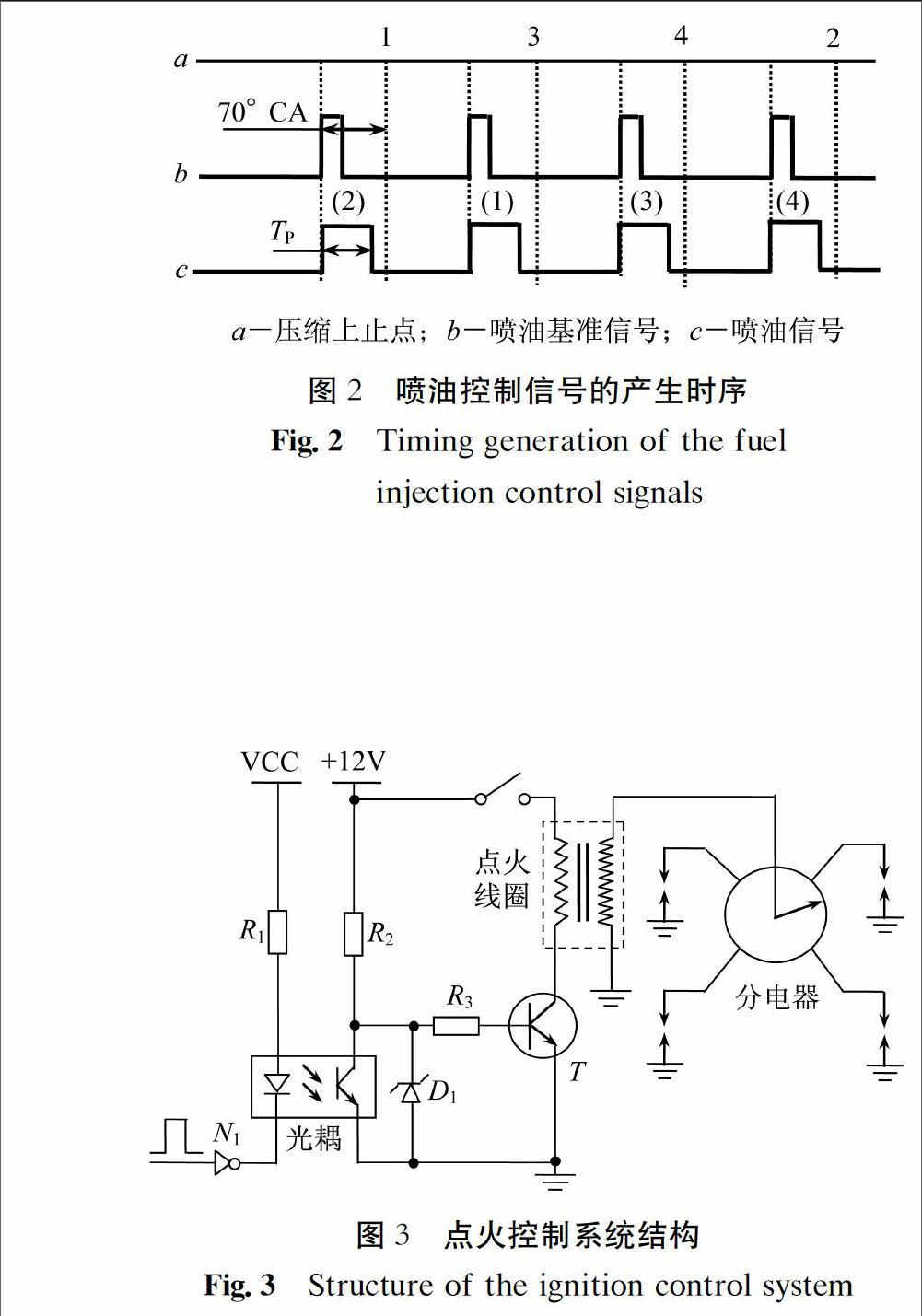
圖2為噴油控制信號的產生時序,其中:Tp為噴油脈寬;數字1、2、3、4分別代表四缸發動機對應的氣缸.在控制系統中,按照圖2中1—3—4—2的發火次序對各缸噴油器進行順序噴射控制.噴油基準信號安排在各缸壓縮上止點前70°CA,各缸噴油器均從進氣行程開始前250°CA開始噴油.對不同工況下的空燃比采用不同的控制方式.在發動機起動過程中,對燃油混合氣進行加濃控制,并依據冷卻液溫度結合發動機試驗分別確定合適的冷起動和熱起動噴油量;在起動后暖機過程中,隨著冷卻液溫度的升高,將缸內混合氣由較濃逐漸向理論混合比過渡;當冷卻液溫度超過一定值時,利用氧傳感器對空燃比進行反饋控制,將空燃比控制在理論混合比附近.
1.2 點火定時控制
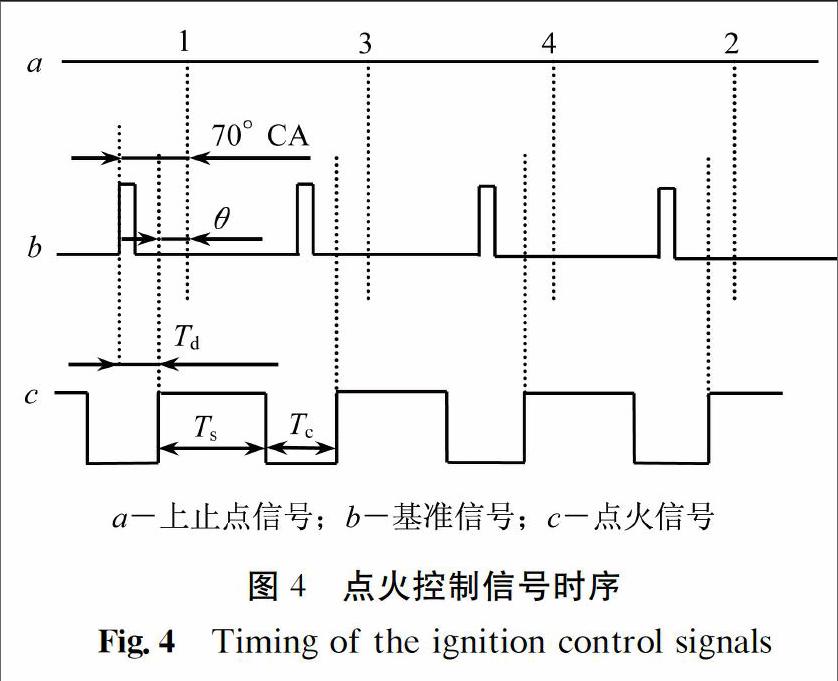
點火控制系統結構如圖3所示,圖中:VCC、D1、N1分別代表直流電源、二極管、脈沖信號;
點火線圈控制信號的定時關系及產生原理如圖4所示,圖中:Td為基準信號與點火脈沖起始點時間間隔;Ts為點火時間間隔;Tc為點火蓄能時
間;θ為點火提前角.發動機怠速運行過程中,當某一基準信號到來時,首先依據發動機的冷卻水溫和轉速得到基本點火提前角θ0.本次怠速轉速的控制中,同時調節怠速旁通閥開度和點火提前角減小怠速轉速的波動,所以發動機實際運行中的點火提前角θ為θ0與模糊輸出量
SymbolDA@ θ之和.
2怠速模糊控制系統
本文怠速轉速模糊控制原理如圖5所示,圖中:n為轉速;n0為目標轉速;Δn為轉速偏差;n·為偏差變化率.控制系統實時檢測發動機的n并結合當時的n0計算Δn及n·;模糊推理器以Δn和n·作為輸入變量,經過模糊推理操作,得到旁通空氣閥占空比(PWM)和點火提前角(AST)的控制輸出量,對發動機的運行狀態進行反饋調節,使發動機轉速保持在目標轉速附近.
2.1怠速目標轉速
怠速目標轉速n0的高低直接影響發動機怠速工況的排放性及燃油經濟性.為便于與原機進行對比,本文采用與原機相同的怠速目標轉速.因此,首先借助診斷儀通過試驗對不同冷卻液溫度T下的原機怠速目標轉速進行了測試,測試結果如圖6所示.
2.2模糊控制器
怠速模糊控制系統的核心是模糊推理器.模糊控制器完成輸入變量的模糊化、模糊推理和模糊輸出量的精確化等操作.
2.2.1輸入變量的模糊化
在進行模糊推理之前,需要輸入變量進行模糊化處理.本文將輸入變量Δn和n·分別劃分為負大(NB)、負中(NM)、負小(NS)、零(O)、正小(PS)、正中(PM)、正大(PB)共7個模糊子集.依據原機試驗確定了Δn和n·的變化范圍(論域),為了便于表示,將Δn和n·的論域統一量化為[-6,6]
區間.模糊子集隸屬函數采用梯形輸入隸屬函數形式,如圖7所示.
2.2.2模糊推理
模糊推理規則是專家經驗的總結.本文采用的推理形式為
ifXiandXj,thenYk
其中:Xi為第1前提;Xj為第2前提;Yk為結論;i、j、k分別代表第i、j、k個模糊子集.
所有這樣的控制規則組成模糊控制規則集.為將發動機的怠速轉速波動控制在最小范圍,利用發動機試驗并借鑒前人的研究成果,對模糊推理規則進行了總結.匯總后的控制規則集如表1所示.
本文采用MAXMIN模糊推理方法.其核心思想是:對于推理規則來說,將第1前提與第2前提隸屬度中的較小值作為對應輸出模糊子集的隸屬度;若不同規則對于同一個輸出模糊子集有貢獻,取其中的最大輸出隸屬度作為該輸出模糊子集的最終隸屬度.
2.2.3模糊輸出量的精確化
本文中兩個輸出變量PWM和AST相互獨立,且隸屬函數皆采用單點形式,采用加權平均判決方法求取精確控制值.其計算公式為
U=∑mj=1(μj×yj)∑mj=1μj
(1)
式中:U為精確輸出量;μj為第j個模糊輸出變量的隸屬度;yj為第j個模糊子集的支持值;m為輸出模糊子集的數目.
3怠速控制系統的試驗研究
本文搭建的發動機試驗臺架如圖8所示.通過發動機水溫調節系統使發動機冷卻液溫度恒定在80 ℃,分別采用原機控制系統和所開發的怠速模糊控制系統對發動機進行控制,并利用測功機對發動機進行模擬加載和卸載,對比測試兩種控制方式下的發動機怠速轉速波動情況.
圖9為加載情況下兩種控制方式的運轉穩定性對比.原機怠速轉速最高為830 r·min-1,最低為740 r·min-1,轉速變化最大幅度為90 r·min-1;采用模糊控制,怠速轉速最高為815 r·min-1,最低為765 r·min-1,轉速變化最大幅度為50 r·min-1.
圖10為兩種控制方式在卸載時的對比情況.原機怠速轉速最高為840 r·min-1,最低為780 r·min-1,轉速變化最大幅度為60 r·min-1;采用模糊控制方式,怠速轉速最高為825 r·min-1,最低為785 r·min-1,轉速變化最大幅度為40 r·min-1.
上述結果表明,采用模糊控制后發動機的怠速轉速波動幅度進一步下降,怠速運行質量獲得了較大的改善.
4結論
針對由于汽車發動機怠速運行工況復雜而造成難以建立精確數學模型的特點,在完成噴油、點火控制系統匹配的基礎上,開發了怠速模糊控制器.該控制器以發動機轉速偏差以及偏差變化率為輸入量,通過模糊推理對怠速閥開度和點火提前角進行實時控制.試驗結果表明,采用模糊控制后,怠速轉速對于載荷突變具有更好的適應能力,發動機的怠速運行穩定性獲得較大改善.
參考文獻:
[1]THORNHILL M,THOMPSON S,SINDANO H.A comparison of idle speed control schemes[J].Control Engineering Practice,2000,8(5):519-530.
[2]ENDRES H,NEUBER H J,WURMS R.Influence of swirl and tumble on economy and emissions of multi valve SI engines[R].SAE Technical Paper 920516,1992.
[3]KOKOTOVIC P K,RHODE D.Sensitivity guided design of an idle speed controller[R].Report No.1.Urbana,USA:Ford Motor Company,PK Research,2001.
[4]LIY L,WANG L B,ZENG Z W,et al.Study of compound fuzzyPID control method for gasoline engine idling speed control[J].Chinese Internal Combustion Engine Engineering,2010,31(3):57-60.
[5]趙光宙,楊志家.應用神經網絡模糊控制器的發動機怠速控制[J].內燃機工程,2000,21(1):59-62.
[6]陳萬忠,張振東,錢耀義,等.汽油機怠速模糊控制的研究[J].農業機械學報,1998,29(2):116-120.
[7]竇振中.模糊邏輯控制技術及其應用[M].北京:北京航空航天大學出版社,1995.
猜你喜歡
汽車維修與保養(2021年8期)2021-02-16 00:28:30
汽車維修與保養(2021年8期)2021-02-16 00:28:18
汽車維修與保養(2020年11期)2020-06-09 05:42:06
民用飛機設計與研究(2019年2期)2019-08-05 01:33:40
汽車維護與修理(2016年3期)2016-02-28 13:16:54
汽車維修與保養(2015年1期)2015-04-17 03:25:30
汽車與新動力(2015年1期)2015-02-27 12:11:01
汽車與新動力(2014年6期)2014-02-27 12:10:49
汽車與新動力(2014年5期)2014-02-27 12:10:41
汽車與新動力(2014年2期)2014-02-27 12:10:15