高速開關閥控上下料機械手的氣缸伺服系統研究
2017-04-01 05:04:37郭艷青金愛民王錦波魏振春
合肥工業大學學報(自然科學版) 2017年2期
關鍵詞:系統
郭艷青, 金愛民, 王錦波, 魏振春, 張 利, 吳 波
(1.合肥工業大學 機械工程學院,安徽 合肥 230009; 2.安徽飛翔電器有限公司(旌德),安徽 宣城 242600)
高速開關閥控上下料機械手的氣缸伺服系統研究
郭艷青1, 金愛民2, 王錦波2, 魏振春1, 張 利1, 吳 波1
(1.合肥工業大學 機械工程學院,安徽 合肥 230009; 2.安徽飛翔電器有限公司(旌德),安徽 宣城 242600)
針對現有的比例閥控制氣缸運動位置伺服系統的成本高、抗污染能力差等問題,文章分析了高速開關閥的開關特性,氣缸的流量特性以及熱力學特性,建立了系統的數學模型;并在傳統的控制回路中增加BP(back propagation)神經網絡控制器,該控制器可以根據系統實際輸出和期望輸出的偏差,在線調整PID(proportion integration differentiation)控制器的控制參數;以上下料機械手中的DGPL型氣缸為控制對象,進行氣動位置伺服控制的仿真研究。仿真實驗表明,在系統參數相同的條件下,基于BP神經網絡的PID控制效果優于傳統方法的控制效果,能夠實現氣缸位置伺服系統的高精度控制。
氣缸伺服控制;高速開關閥;BP神經網絡;上下料機械手;控制精度
目前氣缸位置伺服控制系統在工業自動化中應用較多,氣缸伺服控制系統多采用通過比例/伺服閥來控制氣缸的伺服運動[1]。該系統控制閥價格較高、體積較大、抗污染能力不強。而隨著價格相對較低、抗污染能力強的高速開關閥不斷突破[2],開關響應延遲不斷降低,高速開關閥控制氣缸位置伺服控制技術的研究也不斷深入。文獻[3]在建立高速開關閥控缸定位系統的數學模型基礎上,應用PID(proportion integration differentiation)算法在Matlab上進行仿真,驗證了控制系統的動態性能和位置精度;文獻[4]在建立高速開關閥位置控制模型的基礎上,利用遺傳算法對系統參數進行尋優,實現了對液壓缸位置的精確控制。
本文介紹了一種高速開關閥控制氣缸的伺服運動,分析了高速開關閥的特性和氣缸的特性,結合目前神經網絡在控制中應用的不斷擴展[5],提出了一種基于BP(back propagation)神經網絡的高速開關閥控制氣缸伺服運動的控制策略,通過仿真分析驗證了該控制策略的可行性。
1 系統組成與工作原理
上下料機械手氣缸伺服系統的原理示意圖如圖1所示。
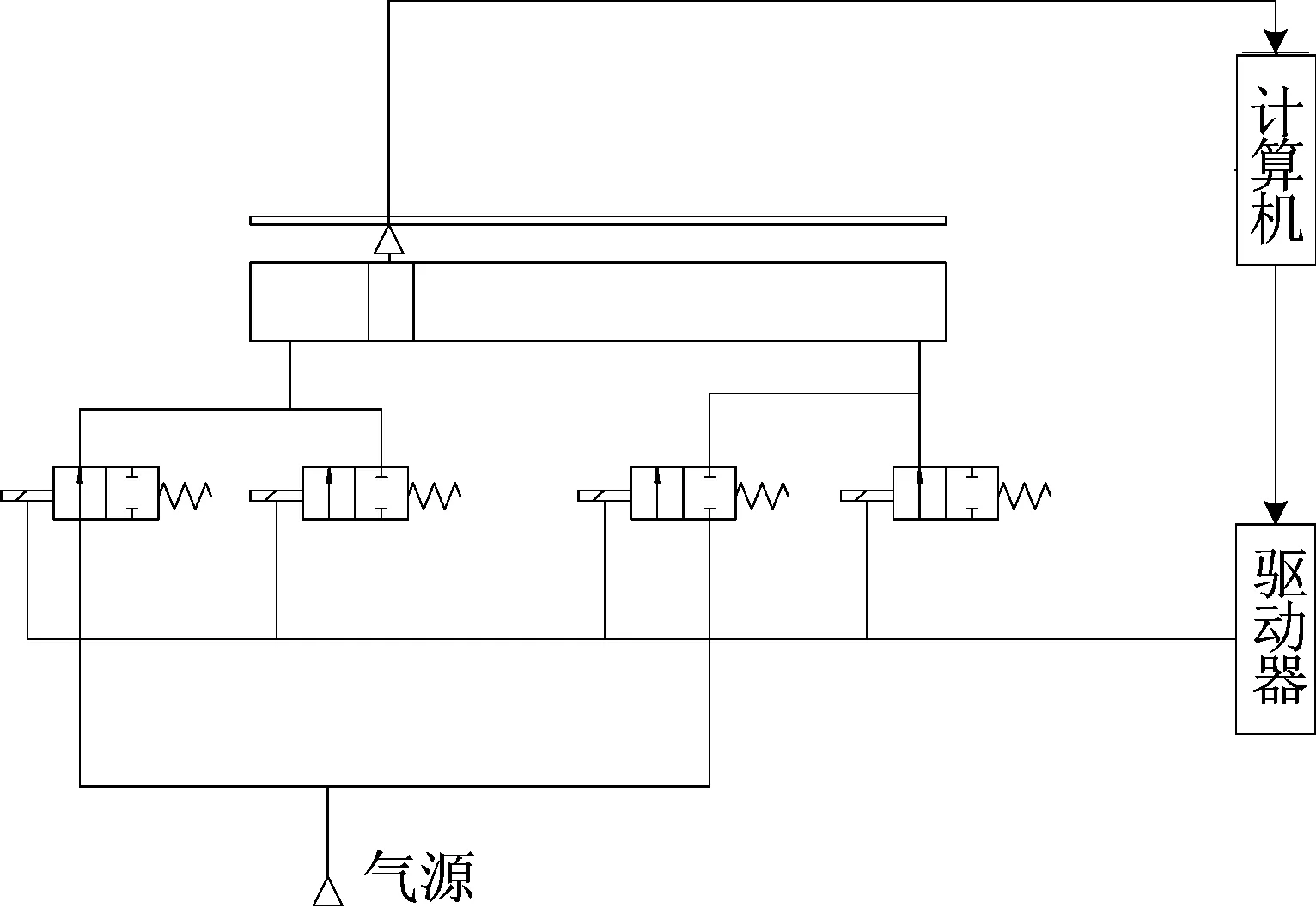
圖1 上下料機械手氣缸伺服系統的原理圖
該系統由氣缸、位置檢測傳感器、高速開關閥、驅動器以及計算機組成。氣缸為FESTO DPGIL25-300型號的無桿氣缸,氣缸標準行程為300 mm,缸徑為25 mm。高速開關閥為FESTO公司MHJ09-S高速開關閥,閥的公稱直徑為9 mm,其開啟和關閉時間均小于1 ms。
高速開關閥控氣動伺服系統的工作原理為:計算機通過對位置檢測傳感器傳遞回來的信息進行處理,產生脈沖寬度調制(pulse width modulation,PWM)信號,通過驅動器控制開關閥的開關動作,從而控制氣缸兩端的氣體流量和壓力,實現氣缸的往復伺服運動。
2 系統數學建模
無桿氣缸的結構示意圖如圖2所示。因為氣動系統很復雜,為其建立一個精確的模型非常困難,所以在建立系統數學模型前,先作如下假設:① 系統中氣體為理想氣體,與外界無交換;② 氣缸內的熱力學過程為準平衡過程;③ 氣體通過控制閥的流動為氣體一維定常穩定流動。
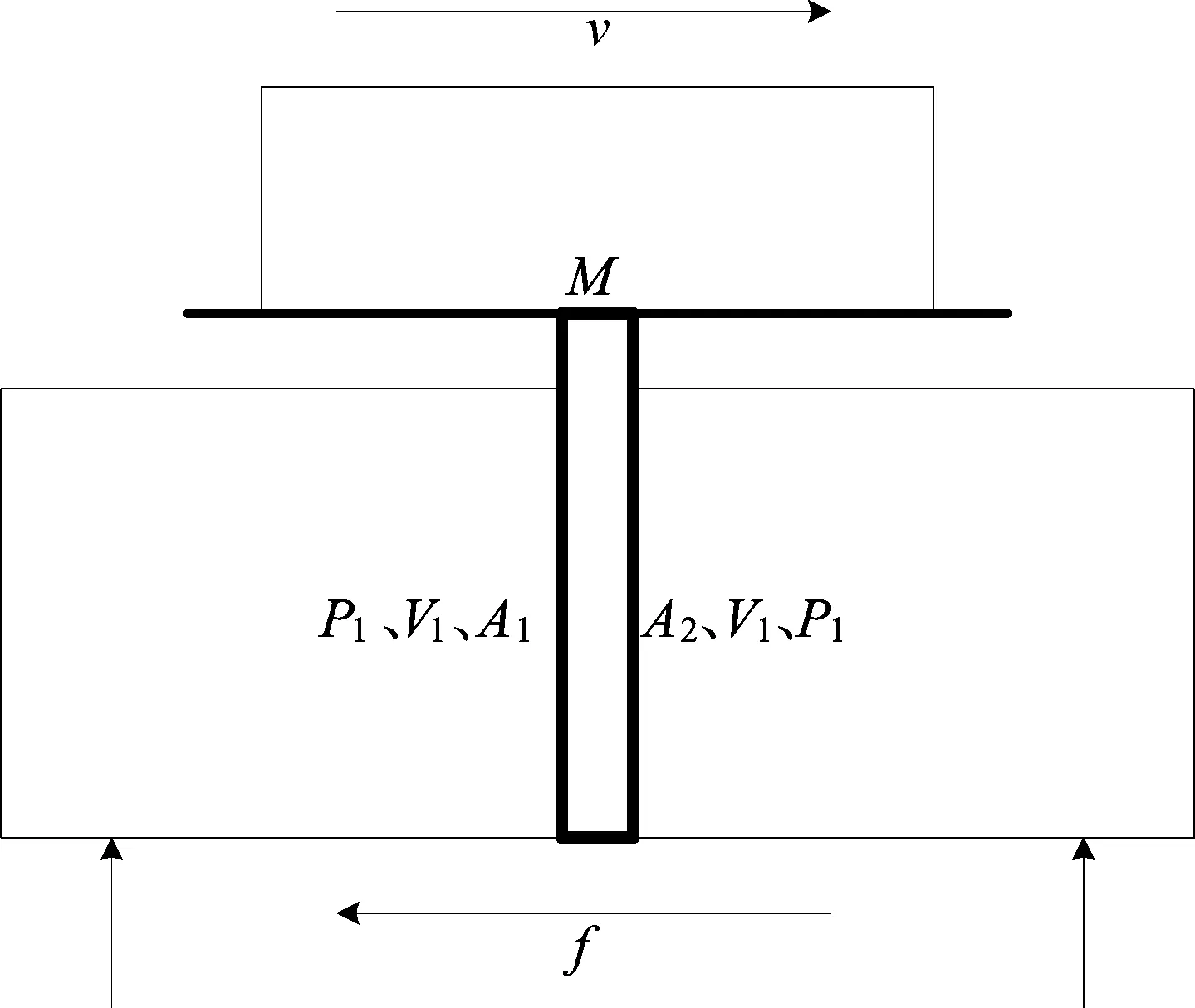
圖2 無桿氣缸結構
2.1 氣缸流量特性分析
對于該系統,由物質質量守恒定律可知,流入和流出氣缸容腔的流量qm應等于容腔內氣體質量m的變化率,則
(1)
(2)
其中,P1、V1、A1和P2、V2、A2分別為左、右兩腔的內壓力、體積和活塞面積。
2.2 氣缸熱力學分析
在氣缸活塞運動時,左、右兩腔分別只有進氣或放氣過程,那么將左、右兩腔視為閉口系統,根據熱力學第一定律可得氣缸左、右兩腔的能量方程為:
(3)
(4)
其中,T1和T2分別為左、右兩腔的溫度;K和R分別為等熵指數和氣體常數;KP1、KP2分別為P1、P2下的等熵指數。
2.3 氣缸運動學分析
根據牛頓第二定律,氣缸活塞的運動方程為:
(5)
其中,x為氣缸運動的位移;M為負載的質量;F為活塞所受的外力大小;Ff為活塞所受到的摩擦力大小。
2.4 高速開關閥特性分析
本文所采用的高速開關閥的開關時間小于1 ms,其開關時間相對于PWM控制信號的周期來說非常小,通過實驗可得出開關閥響應曲線。由該曲線可知,開關閥動作與電壓信號基本同步,因此可以認為高速開關閥在PWM信號控制下只有“完全開”和“完全關”2種狀態,得到通過開關閥的流量與占空比成線性關系。也就是說,在PWM信號的頻率已選定合適值時,通過改變PWM信號的占空比D來控制閥的平均有效開口面積(即等效于平均流量),占空比與平均流量的關系式為:
(6)

對于開關閥,氣體通過閥口的流動過程視為一維等熵流動,則開關閥的質量流量qm在Pd/Pu≥0.528時為:
(7)
qm在Pd/Pu<0.528時為:
(8)
其中,Pd和Pu分別為開關閥進、出口壓力大小;A(u)為閥口平均有效面積;u為氣體流動速度。
2.5 系統傳遞函數
實驗所測得的相關參數見表1所列。綜合(1)~(8)式并進行線性化處理,再將表1中數據代入得到系統的傳遞函數為:

(9)
3 BP神經網絡PID控制
3.1BP神經網絡PID控制的基本原理
本文提出的BP神經網絡的PID控制原理[7]如圖3所示,它將常規PID控制和BP神經網絡控制算法相結合,在常規的控制回路中增加了一個BP神經網絡參數調節控制器。該控制器以BP神經網絡算法為理論基礎,根據系統的實際輸出值和期望值之間的偏差在線調節PID控制器的比例增益kP、積分增益kI以及微分增益kD3個參數,對常規的PID控制進行優化,實現氣動伺服系統的高精度控制。
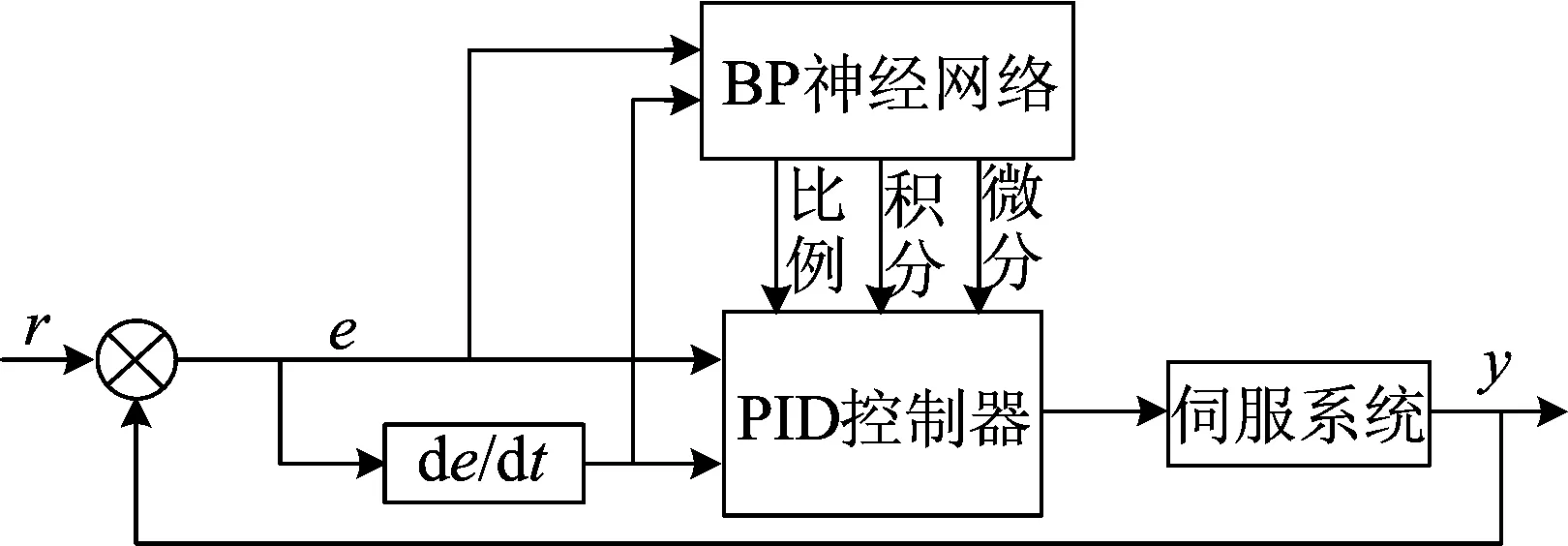
圖3 控制器系統的結構
3.2BP神經網絡PID控制參數分析
BP神經網絡結構一般由輸入層、輸出層以及若干隱層組成。理論證明,具有單隱層的前饋網絡可以映射所有的連續函數,只有學習不連續函數才需要2個隱層,因此本文中的網絡采用3層結構,即輸入層、輸出層和1個隱層。輸入層有3個神經元,分別輸入系統的輸入量、輸出量和偏差量;1個隱含層有6個神經元;輸出層有3個神經元,分別輸出kP、kI、kD的值。
隱層的節點數目對于網絡的性能具有一定影響,理論上存在一個最佳的節點個數,且并非越大越好。一方面,神經網絡需要存儲訓練樣本中蘊含的所有規律,因此一定數量的節點對于網絡的存儲是必要的;另一方面,節點過多會增加網絡訓練時間,同時會將樣本中非線性規律的內容存儲進去,反而降低網絡的泛化能力。
因此,在上述2種情況之間存在著1個適當的隱層節點數,為BP神經網絡的最優節點數。為了保證較高的控制精度,結合本文被控對象的特性,本文通過仿真及試驗分析確定出網絡隱層的節點個數為6。
BP神經網絡結構為3-6-3型,如圖4所示。
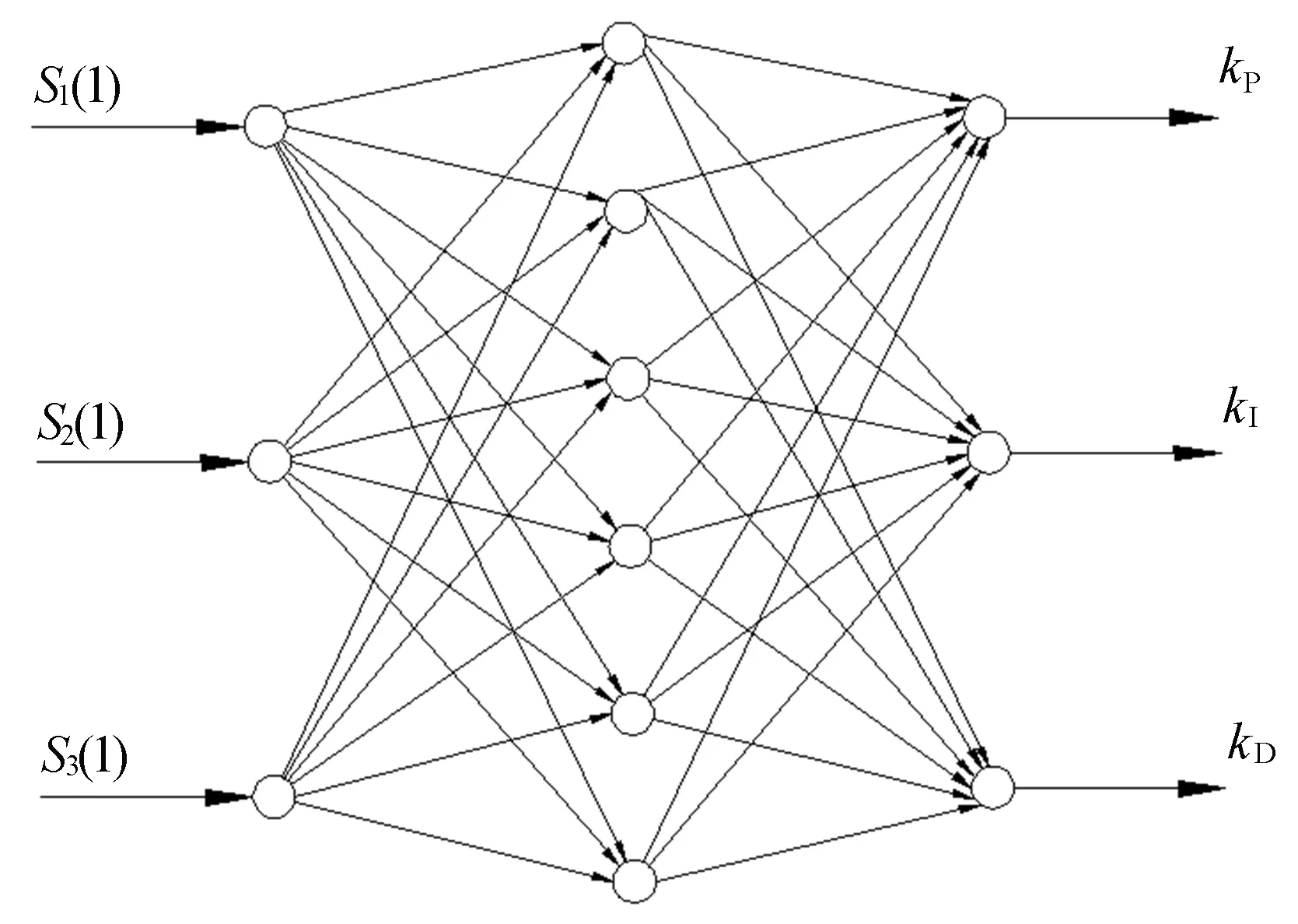
圖4 3-6-3型BP神經網絡結構
BP網絡輸入層的輸入為:
(10)
BP網絡中隱含層的輸入和輸出分別為:
(11)
(12)

(13)
網絡輸出層的輸入和輸出分別為:
(14)
其中,l=1,2,3。輸出層神經元的3個參數kP、kI和kD激活函數取為非負的Sigmoid函數,即
(15)
控制系統的性能指標設置為:
(16)
網絡中的加權系數修正為:
(17)
其中,η為學習速率;α為慣性系數[7]。
最后,確定出網絡輸出層加權系數的學習算法為:
(18)
(19)
隱含層的加權系數的學習算法為:
(20)
(21)
其中

4 仿真分析
為了驗證BP神經網絡PID控制方法的有效性,分別采用常規PID控制和常規PID+BP神經網絡控制對氣動位置伺服系統進行控制仿真研究,并對比以上2種控制方法的控制效果。為了檢驗常規PID控制加入BP神經網絡控制后的效果,加入前、后保持系統的其他參數不變。
在仿真中,將(10)式作為高速開關閥控制氣缸伺服控制系統仿真的數學模型。仿真中采樣時間為1 ms,PID控制器的參數整定后如下:kP=12,kI=1.5,kD=0.5。仿真中BP神經網絡的學習速率η取為0.5,慣性系數α取為0.3,加權系數初始值采用隨機值,神經網絡樣本訓練步數為1 000步。控制目標分別為階躍信號和正弦波信號的跟蹤,仿真結果如圖5、圖6所示。圖5表示在2種控制方式下系統的階躍信號輸出響應曲線,其中,曲線1為系統的期望輸出,曲線2為傳統PID控制輸出,曲線3為BP神經網絡PID控制輸出響應。由圖5可知:傳統的PID控制對階躍信號的響應輸出曲線中出現較大的超調量,系統達到穩定時間較慢,有振蕩;采用BP神經網絡PID控制后,系統無超調量、調整時間小、無振蕩,使氣缸伺服運動具有較好的穩定性。
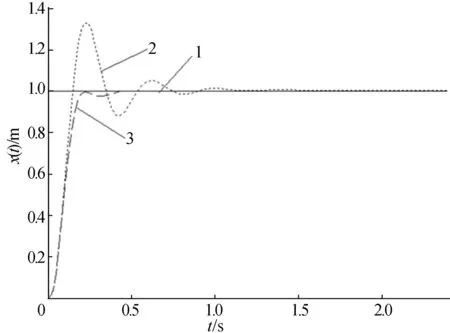
圖5 2種控制方式下的階躍響應
圖6表示在2種控制方式下系統的正弦波輸出響應曲線。其中,曲線1為系統的期望輸出曲線,曲線2為傳統PID控制輸出,曲線3為BP神經網絡PID控制輸出響應。由圖6可知:傳統的PID控制效果較差,跟蹤新信號曲線不僅有一定的超調量,還有較大的遲滯現象;而采用BP神經網絡PID控制后,曲線3基本與曲線1重合,能準確地跟蹤正弦波曲線,達到較高的跟蹤精度,實現氣缸伺服控制系統的高精度定位。
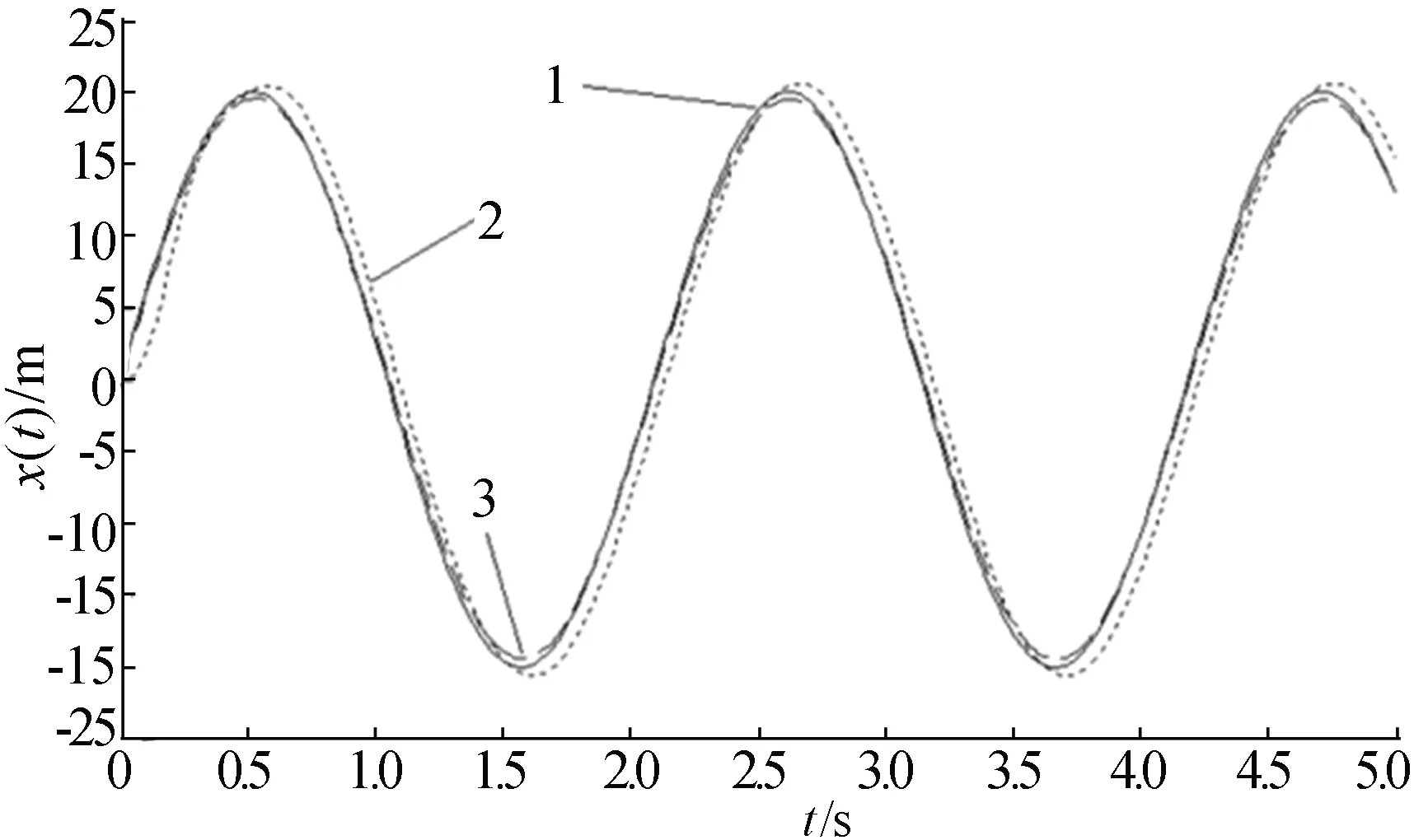
圖6 2種控制方式下的正弦波響應
5 結 論
本文通過對氣缸伺服控制系統各個部件的選型計算,建立了控制系統的數學模型;對系統仿真的結果表明,與傳統PID控制相比,基于BP神經網絡的控制系統穩定性較好、響應速度快、定位控制精度高,驗證了控制策略的可行性;將研究結果運用于自動上下料機械手控制系統,系統對機械手具有高精度、快速、穩定的控制效果,滿足上下料機械手對氣缸伺服控制的要求。
[1] 王田苗,陶永.我國工業機器人技術現狀與產業化發展戰略[J].機械工程學報,2014,50(9):1-12.
[2] 吳萬榮,徐智,史建.基于高速開關閥的液壓鉆機推進系統研究[J].計算機仿真,2014,31(12):201-205.
[3] 胡杰,許昌.高速開關閥的氣缸定位控制[J].機械設計與研究,2011,27(6):75-78.
[4] 高欽和,劉志浩,牛海龍.參數優化的高速開關閥控液壓缸位置控制研究[J].機械科學與技術,2015,34(6):903-909.
[5] 王波,曹春平,胥小勇,等.基于神經網絡的流涎機組多電機同步控制研究[J].中國機械工程,2014,25(1):46-50.
[6] 孟德遠,陶國良,劉昊.基于LuGre模型的氣缸摩擦力特性研究[J].浙江大學學報(工學版),2012,46(6):1027-1033.
[7] 朱堅民,雷靜桃,黃之文,等.基于灰色關聯補償控制的氣動位置伺服控制系統[J].機械工程學報,2012,48(20):159-167.
[8] 蔡自興,余傳俐,肖曉明.智能控制原理與應用[M].北京:清華大學出版社,2014.
(責任編輯 胡亞敏)
Research on cylinder servo system of loading and unloading manipulator under the control of high-speed switching valve
GUO Yanqing1, JIN Aimin2, WANG Jinbo2, WEI Zhenchun1, ZHANG Li1, WU Bo1
(1.School of Mechanical Engineering, Hefei University of Technology, Hefei 230009, China; 2.Anhui Feixiang Electric Co., Ltd.(Jingde), Xuancheng 242600, China)
The existing proportional valve pneumatic position servo control has high costs and poor ability of anti-pollution. To solve this problem, the switching characteristics of high-speed switching valve and the flow and thermodynamic characteristics of cylinder are analyzed, and the mathematical model of the system is established. Back propagation(BP) neural network controller is added into the traditional control loop, which makes online adjustment on the control parameters of proportion-integration-differentiation(PID) controller based on the deviation between actual output and desired output. Taking the DGPL cylinders from loading and unloading manipulator as the control object, the simulation of pneumatic position servo control is made. The simulation results show that under the same system parameters, the control effect of BP neural network based PID controller is superior to that of traditional control methods, achieving high-precision control of the cylinder position servo system.
cylinder servo control; high-speed switching valve; back propagation(BP) neural network; loading and unloading manipulator; control accuracy
2015-10-30;
2015-12-14
安徽省重大科技專項資助項目(15czz02030)
郭艷青(1990-),女,河北保定人,合肥工業大學碩士生; 張 利(1955-),女,安徽蚌埠人,合肥工業大學教授,碩士生導師.
10.3969/j.issn.1003-5060.2017.02.003
TP273
A
1003-5060(2017)02-0154-05
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
