基于機械手臂的葉菜有序收獲機械設(shè)計與實現(xiàn)
2017-04-05 16:47:09吳玉娟劉永華
江蘇農(nóng)業(yè)科學(xué) 2016年12期
吳玉娟+++劉永華
摘要:為了實現(xiàn)對葉菜快速自動收獲,綜合運用嵌入式軟硬件開發(fā)技術(shù),選用Arduino IDE作為軟件設(shè)計開發(fā)平臺,研制開發(fā)了一種集采摘、自動收集等多種功能于一體的葉菜有序收獲裝置,它由控制模塊、采摘模塊、收集模塊等組成,能夠?qū)崿F(xiàn)對整棵葉菜的收割與采集,并且擺放有序,便于挑選整理,對于提高葉菜收獲生產(chǎn)效率具有重要意義。
關(guān)鍵詞:葉菜;有序收獲;收獲機械
中圖分類號: S225.92文獻(xiàn)標(biāo)志碼: A
文章編號:1002-1302(2016)12-0353-03
[HJ1.3mm]
收稿日期:2016-10-14
基金項目:江蘇省農(nóng)業(yè)科技自主創(chuàng)新資金[編號:CX(14)2110];江蘇省農(nóng)業(yè)三新工程(編號:SXGC[2016]305);江蘇農(nóng)林職業(yè)技術(shù)學(xué)院項目(編號:2013td06)。
作者簡介:吳玉娟(1981—),女,江蘇南京人,碩士,講師,主要從事機電綜合研究與開發(fā)。E-mail:623255445@qq.com。
中國是蔬菜生產(chǎn)大國,但蔬菜生產(chǎn)機械化水平卻相對落后,其中葉菜類蔬菜收獲機械裝備在我國幾乎還是空白,隨著現(xiàn)代農(nóng)業(yè)技術(shù)的發(fā)展,蔬菜機械化收獲技術(shù)在我國越來越受到重視。歐美等西方發(fā)達(dá)國家蔬菜種植以大面積農(nóng)田種植為主,開發(fā)應(yīng)用的蔬菜收獲機械主要是大中型機械設(shè)備,發(fā)達(dá)國家收獲機械的割臺較為單一,不適合我國多品種的葉菜形態(tài),且單臺收獲機械重量重、面積大,容易造成對作物的壓踏,影響蔬菜作物的后續(xù)生長和收獲效率,直接引進(jìn)應(yīng)用價值不大。通過資料查詢,國內(nèi)尚無對整棵葉菜的收割與采集、擺放有序整理以及后期銷售成型的葉菜收獲機械;因此,研制開發(fā)一種基于機械手臂的葉菜有序收獲裝置,對于提高葉菜收采效率和降低蔬菜生產(chǎn)成本具有重要意義[1]。
1整機結(jié)構(gòu)及工作原理
1.1整機結(jié)構(gòu)
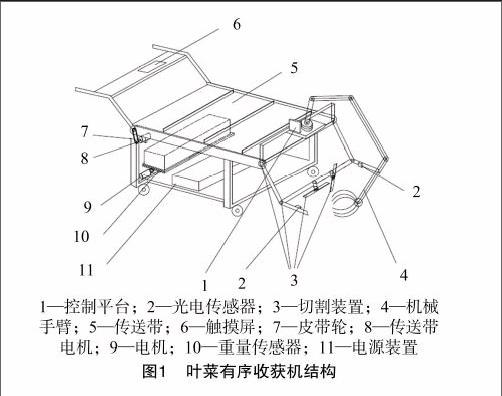
基于機械手臂的葉菜有序收獲裝置整機結(jié)構(gòu)主要包括收獲機械本體、抓取裝置、控制系統(tǒng)等3大部分組成。其中機械本體通過專用控制器與抓取裝置、切割裝置、傳送裝置、裝箱裝置以及顯示裝置相連接。機械本體的前端上方安裝有抓取裝置,前端下方安裝有切割裝置,中部上方安裝有傳送裝置,傳輸裝置末端下方設(shè)有裝箱裝置,裝箱裝置安裝在收獲機械本體上,收獲機械本體結(jié)構(gòu)見圖1[2-3]。
1.2工作原理
通過收獲機械本體前端的傳感器檢測前方是否有葉菜,并將檢測信號傳至控制器,如果無葉菜,控制器將停止機械手抓取和切割裝置切割等動作,并將此信號反饋給顯示裝置顯示;如果前方有葉菜,控制器驅(qū)動機械手臂到設(shè)置的位置,控制機械手抓取葉菜,控制器控制機械手臂向后翻轉(zhuǎn)至傳送帶上方,并使葉菜莖稈與傳送帶運動方向垂直,同時松開機械
手[CM(25],葉菜水平落在傳送裝置上,然后控制器控制機械手臂復(fù)[CM)]
[FK(W14][TPWYJ1.tif]
位。當(dāng)傳送帶翻轉(zhuǎn)至背面時,傳送帶上的葉菜掉入下方菜籃里。菜籃通過下方齒輪齒條傳動,進(jìn)行前后移動(移動方向與傳送帶移動方向同軸),可實現(xiàn)葉菜的有序裝載。
1.3性能特點
(1)機械手夾持葉菜位置可進(jìn)行調(diào)整,可達(dá)到機械手最佳夾持葉菜位置。(2)切割裝置位置可上下調(diào)整,根據(jù)觸摸屏所輸入數(shù)據(jù),實現(xiàn)切割裝置自動調(diào)整上下位置,實現(xiàn)最佳切割位置。(3)當(dāng)切割完成,機械手夾持葉菜翻轉(zhuǎn)至傳送帶上,使莖稈與傳送帶運動方向垂直,實現(xiàn)蔬菜采摘有序傳送擺放。(4)當(dāng)傳送帶翻轉(zhuǎn)至背面時,傳送帶上的葉菜掉入下方菜籃里。(5)菜籃通過下方齒輪齒條傳動,進(jìn)行前后移動(移動方向與傳送帶移動方向同軸),可實現(xiàn)葉菜的有序裝載。(6)用戶還可通過觸摸屏的用戶界面,輸入機械手抓取葉菜初始位置數(shù)據(jù),實現(xiàn)抓取葉菜最佳位置。(7)觸摸屏設(shè)計界面友好,收獲機械全程狀態(tài)及相關(guān)數(shù)據(jù)實時顯示,并自動控制,能夠?qū)崿F(xiàn)不同品種、不同長勢葉菜類蔬菜有序收獲。
基于機械手臂的葉菜有序收獲機械裝置,將滿足廣大蔬菜種植戶提高收獲勞動效率的迫切需要,對于解決蔬菜收獲難題具有重要意義。
[BT1#]2葉菜有序收獲裝置工作流程設(shè)計
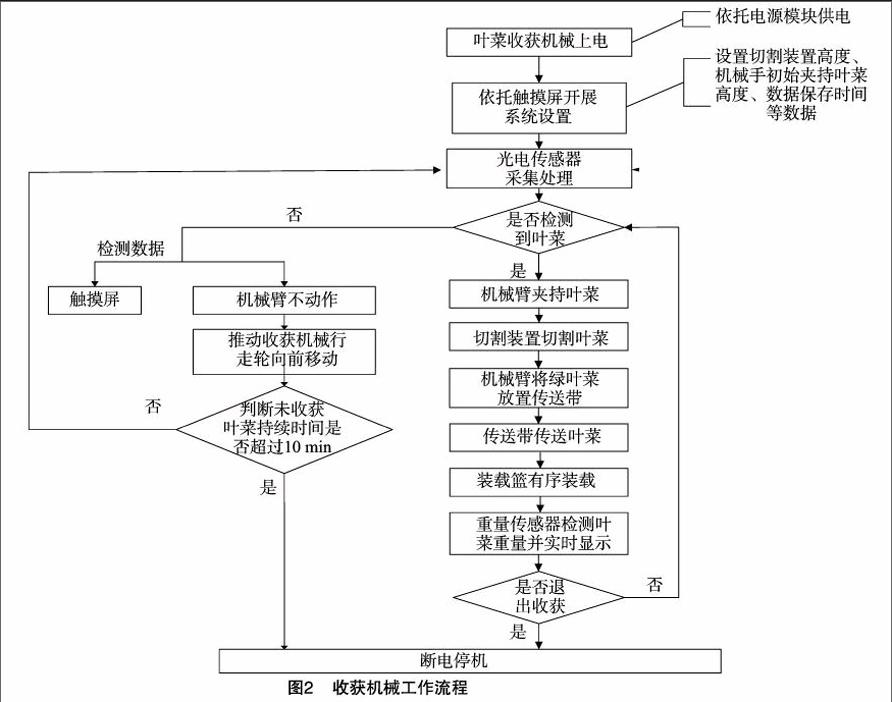
根據(jù)葉菜通過顯示裝置調(diào)整機械手臂抓取位置、切割裝置的切割位置、平板速度、傳送帶速度、菜籃重量等參數(shù),也可選擇控制器保存的歷史參數(shù)。
通過收獲機械本體前端的光電傳感器檢測前方是否有葉菜,并將檢測信號傳至控制器,如果無葉菜,控制器將停止機械手抓取和切割裝置切割等動作,并將此信號反饋給顯示裝置顯示;如果前方有葉菜,控制器驅(qū)動機械手臂到設(shè)置的位置,控制機械手抓取葉菜;當(dāng)未檢測到葉菜持續(xù)時間超過 10 min 后,控制器自動停機斷電。
控制器控制機械手臂向后翻轉(zhuǎn)至傳送帶上方,并使葉菜莖稈與傳送帶運動方向垂直,同時松開機械手,葉菜水平落在傳送裝置上,然后控制器控制機械手臂復(fù)位。
通過傳送帶將葉菜傳送到菜籃中,菜籃反復(fù)由前向后和由后向前移動,即菜籃由前向后移動,當(dāng)移動到達(dá)后限位時,再由后向前移動,當(dāng)移動受到達(dá)到前限位時,再由前向后移動,如此反復(fù),直到菜籃質(zhì)量達(dá)到預(yù)設(shè)質(zhì)量,從而實現(xiàn)葉菜的有序擺放;在菜籃移動過程中,平板下方的質(zhì)量傳感器不斷將檢查到的質(zhì)量信號傳輸給控制器,控制器使顯示裝置顯示質(zhì)量信息,并判斷菜籃的質(zhì)量是否達(dá)到預(yù)設(shè)質(zhì)量值,如果達(dá)到發(fā)出信號通知用戶[4]。收獲機械工作流程見圖2。
3有序收獲機械控制模塊設(shè)計與實現(xiàn)
為了使有序收獲機械裝置能夠自動收獲不同尺寸的蔬菜類型,設(shè)計開發(fā)有序收獲機構(gòu)控制裝置傳感器控制模塊軟件,完成了控制模塊研發(fā)。
3.1控制模塊硬件設(shè)計
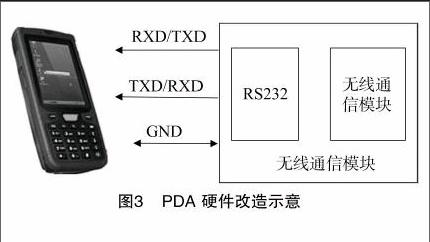
本裝置采用Arduino作為控制模塊的開發(fā)平臺,并對其進(jìn)行相應(yīng)的改造。PDA作為裝置的控制器及無線網(wǎng)絡(luò)的協(xié)調(diào)器,需要內(nèi)嵌1個無線通信模塊,以實現(xiàn)與傳感器節(jié)點的無線組網(wǎng)(圖3)。我們對PDA硬件結(jié)構(gòu)進(jìn)行改造,以便能夠使用RS232串口與無線通信模塊進(jìn)行互聯(lián)互通。無線通信模塊接收傳感器節(jié)點集數(shù)據(jù),然后自動傳輸至PDA處理,從而在PDA上顯示和存儲[5-6]。控制模塊硬件設(shè)計見圖4。
3.2控制模塊件設(shè)計
為了設(shè)計開發(fā)實用的有序收獲機械控制程序,選用了便捷[CM(25]靈活、方便上手的開源電子原型平臺Arduino作為軟件設(shè)[CM)]
[FK(W8][TPWYJ3.tif]
計的開發(fā)平臺,它能夠支持在Windows、Macintosh OSX、Linux等3大主流操作系統(tǒng)上運行。在控制模塊軟件系統(tǒng)的設(shè)計過程中,按照軟件工程化的設(shè)計理念,嚴(yán)格遵循需求分析、概要設(shè)計、詳細(xì)設(shè)計、系統(tǒng)測試的工程化設(shè)計理念,研制開發(fā)了控制模塊軟件系統(tǒng)。其中收獲葉菜傳感器模塊數(shù)據(jù)采集工作流程為傳感器上電之后初始化,然后打開定時器定時,時鐘溢出產(chǎn)生中斷,可以通過模擬開關(guān)ADG704依次選通相應(yīng)的通道進(jìn)[CM(25]行葉菜尺寸數(shù)據(jù)采集;AD采集包括初始化AD轉(zhuǎn)換器、啟[CM)]
[TPWYJ4.tif]
動AD轉(zhuǎn)換、判斷AD轉(zhuǎn)換狀態(tài),最后讀取AD轉(zhuǎn)換后數(shù)值。為了減小誤差,每個通道重復(fù)采集后取平均值,然后選通下一個通道,直到采集完所有通道的信號。當(dāng)所有通道信號都采集完畢后,將數(shù)據(jù)傳輸給控制器,即PDA。完成之后再次打開定時器定時,進(jìn)行下一輪測量、采集[7-8]。傳感器軟件設(shè)計流程見圖5。
[FK(W18][TPWYJ5.tif]
在此基礎(chǔ)上,根據(jù)軟件系統(tǒng)對控制收獲機械臂偏移數(shù)據(jù)的采集結(jié)果,運用Matlab仿真分析軟件對其結(jié)果數(shù)據(jù)進(jìn)行了仿真分析,仿真分析結(jié)果見圖6。
[TPWYJ6.tif;S+3mm]
軟件系統(tǒng)的編程代碼如下:
pinMode(12,INPUT);
Serial.begin(9600);
myshow=0;
mycomflag=2;//機械臂默認(rèn)上電狀態(tài)為:2自動運行
myservoA.attach(3);//控制腰部(A)的端口是3號
myservoB.attach(5);//控制大臂(B)的端口是5號
myservoC.attach(6);//控制小臂(C)的端口是6號
myservoD.attach(9);//控制小臂旋轉(zhuǎn)(D)的端口是9號
myservoE.attach(10);//控制腕部(E)的端口是10號
myservoF.attach(11);//控制腕部旋轉(zhuǎn)(F)的端口是11號
myservoG.attach(8);//kongzhidao pian——2
myservoA.write(10);//初始5點鐘方向10-110
myservoB.write(10);//越小越陡10-30
delay(1000);
myservoC.write(130);//
myservoD.write(90);
myservoE.write(10)。
4結(jié)論
基于嵌入式軟硬件開發(fā)技術(shù)、電子技術(shù)、通信技術(shù),研制開發(fā)了一種集采摘、自動收集、包扎等多種功能于一體的葉菜有序收獲裝置。對完成的葉菜有序收獲裝置進(jìn)行初步試驗,獲得了以下結(jié)論:(1)機械手夾持葉菜位置要能夠滿足收獲不同尺寸葉菜需求進(jìn)行調(diào)整,并且必須能夠依托傳感器自動獲取相關(guān)數(shù)據(jù)。(2)切割裝置位置要能夠?qū)崿F(xiàn)精準(zhǔn)上下自動調(diào)整,當(dāng)切割完成,機械手夾持葉菜翻轉(zhuǎn)至傳送帶上,使莖稈與傳送帶運動方向垂直,實現(xiàn)蔬菜采摘有序傳送擺放。(3)當(dāng)傳送帶翻轉(zhuǎn)至背面時,傳送帶上的葉菜掉入下方菜籃里,否則不利于打包。
[HS2][HT8.5H]參考文獻(xiàn):[HT8.SS]
[1]宋長鳴. 蔬菜價格波動背景下生產(chǎn)者種植意愿變化研究——兼論對Logistic模型的重新解讀[J]. 中國農(nóng)業(yè)大學(xué)學(xué)報,2016,21(1):147-156.
[2]林瑾. 機械手臂抓取軌跡精度測試仿真分析[J]. 中國測試,2013,39(3):125-128.
[3]范正妍,楊飛. 智能機械手臂造型設(shè)計研究[J]. 機械設(shè)計,2013,30(12):100-102.
[4]劉燕,劉洋. 基于變?nèi)嵝躁P(guān)節(jié)的機械臂運動誤差研究[J]. 機械設(shè)計,2010,27(12):62-65.
[5]張燁. 基于Arduino控制板的蔬菜大棚環(huán)境參數(shù)無線采集系統(tǒng)[J]. 江蘇農(nóng)業(yè)科學(xué),2016,44(7):439-442.
[6]左現(xiàn)剛,劉艷昌,王建平. 基于Arduino和 VI 的農(nóng)田信息無線采集系統(tǒng)設(shè)計[J]. 農(nóng)機化研究,2016(2):213-217.
[7]付煥森,李元貴,張雪蓮,等. 智能專家系統(tǒng)在蔬菜溫室大棚種植中的應(yīng)用[J]. 中國農(nóng)機化學(xué)報,2014,35(1):240-244.
[8]田素博,王榮華,邱立春. 溫室穴盤苗自動移栽輸送系統(tǒng)設(shè)計[J]. 沈陽農(nóng)業(yè)大學(xué)學(xué)報,2009,40(4):620-622.