基于MATLAB的操縱穩定性中間位置數據處理
2017-04-08 03:45:58張朝雷
河北軟件職業技術學院學報 2017年1期
關鍵詞:數據處理
張朝雷
(1.長城汽車股份有限公司技術中心,河北保定 071000;2.河北省汽車工程技術研究中心,河北保定 071000)
基于MATLAB的操縱穩定性中間位置數據處理
張朝雷1,2
(1.長城汽車股份有限公司技術中心,河北保定 071000;2.河北省汽車工程技術研究中心,河北保定 071000)
基于MATLAB編制了中間位置數據處理程序,通過將連續正弦曲線的首尾數據做線性擬合得到趨勢誤差,并對原始數據進行矯正;設計了一個無相移低通濾波器,對原始數據進行濾波,避免了信號之間的相位延遲;設計了在4個連續正弦曲線中提取指定數據范圍的程序,得到了方向盤轉角和方向盤力矩4條滯環曲線擬合函數,對擬合函數求跟和求導,提取了方向盤轉角遲滯、方向盤力矩遲滯、中間位置轉向剛度等指標;對方向盤轉角和橫擺角速度做互相關性計算,得到橫擺角速度響應時間。結果表明:通過這些數據處理方法的運用,保證了結果的準確性,提高了數據處理效率。
MATLAB;中間位置;濾波器;數據處理
0 引言
汽車操縱穩定性中間位置試驗反應汽車中心區特性,對中間位置試驗數據做處理并進行指標提取是個繁雜的過程,不同工程師的處理可能會得出不同的結果,這嚴重影響了車輛設計開發。本文基于MATLAB軟件,編制了數據處理程序,詳細介紹了數據處理過程,使整個中間位置試驗數據處理結果準確而高效,同時也可為操縱穩定性其他測試工況的數據處理和分析提供參考。
1 試驗方法
1.1 中間位置試驗方法
測試參數有方向盤轉角、方向盤力矩、橫擺角速度、側向加速度、車速。車輛以100km/h等速直線行駛,待車速穩定后開始記錄數據,使方向盤轉角保持初始位置數秒后給方向盤轉角連續正弦輸入,頻率為0.2Hz,轉角幅值足以使車輛側向加速度峰值達到0.2G,整個試驗過程使方向盤轉角和通過中心區的角速度盡量保持一致,試驗至少獲取4個輸入周期的數據,完成后將方向盤轉角恢復到直行位置保持數秒后停止記錄。
1.2 數據處理
對測試的參數繪制關系曲線回線組,回線組應以適當的方式進行平均,推薦的方法是在圖1所示區間A內的試驗曲線左右轉(上下邊),兩部分分別進行多項式擬合,擬合階次值為3。在進行數據處理時,首先確定數據橫坐標區間,在該區間內按一定比例選取區間A,選取時應確保區間A足夠大,以覆蓋所關心的數據區域,但應避免兩端的滯回效應的影響,其所占橫坐標的比例推薦值為50%~70%[1]。
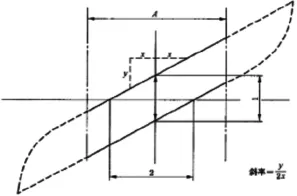
圖1 滯環曲線示意圖
2 MATLAB數據處理過程實現
根據試驗數據特點和指標提取過程的要求構建數據處理流程框圖,如圖2所示。
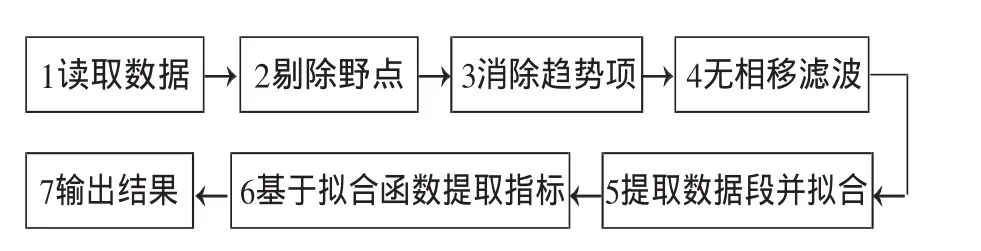
圖2 數據處理流程圖
2.1 讀取數據
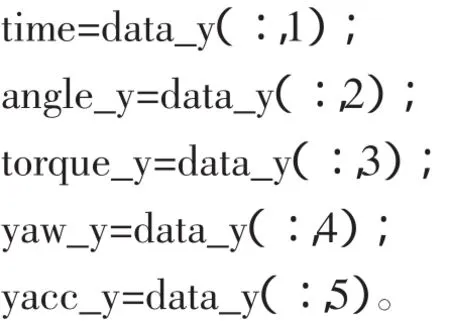
以Excel格式數據舉例說明讀取數據方法,用xlsread(‘filename’)函數讀取Excel格式的試驗數據付給data_y,用data_y(:,c)將data_y中所需信號提取出來,c表示信號位置在第幾列,MATLAB程序實現如下:
data_y=xlsread('路徑文件名.xls');%默認讀取第1個工作薄中的數據
2.2 剔除野點
由于受場地的清潔度、天氣、信號采集系統的電壓波動等影響,試驗數據會偶發突然的變化,俗稱毛刺,對這樣的異常數據點做修正或刪除即可。
2.3 消除趨勢項
受場地傾斜度、持續側風、橫擺角速度傳感器的隨機游走、測試系統溫度變化等因素影響,持續時間比較長的連續正弦數據會產生一定趨勢的偏移,對這種趨勢需要加以修正。
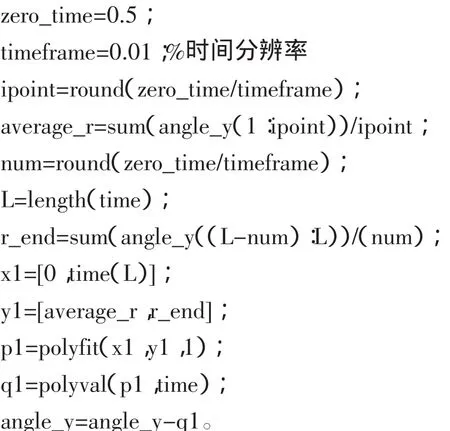
定義連續正弦曲線開始和結束位置記錄的零線時間長度,在此選擇相同的時間長度0.5秒。分別求取前后位置零線的平均值,根據這兩點幅值和首尾時間做1次項擬合線,將記錄的數據減去此擬合線(如圖3所示),MATLAB程序實現如下:
2.4 濾波處理
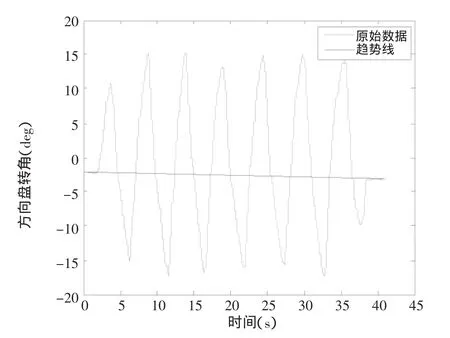
圖3 消除趨勢項曲線圖
一般的數字濾波器濾波后都會產生相位延遲現象(如圖4所示),使考察車輛瞬態響應特性產生誤差。本文使用無相移濾波函數對原始數據濾波后,將濾波序列反折再次通過濾波器,并輸出第2次濾波結果的時間反折序列,實現無相位延遲的濾波處理(如圖5所示),MATLAB程序實現如下:
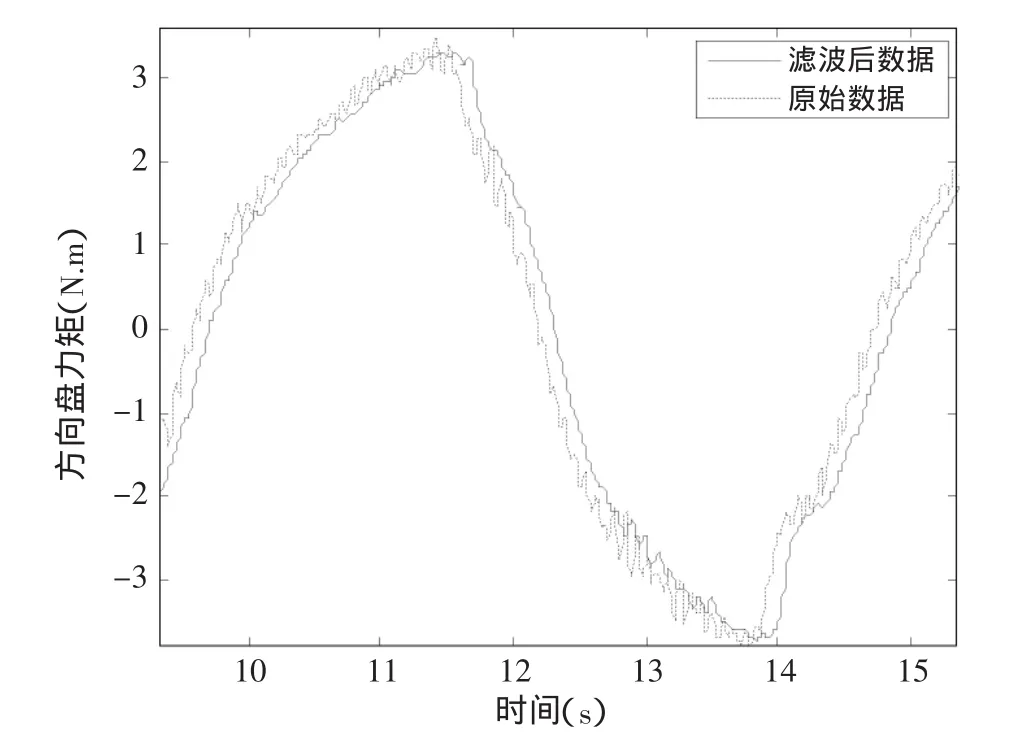
圖4 數字濾波延遲
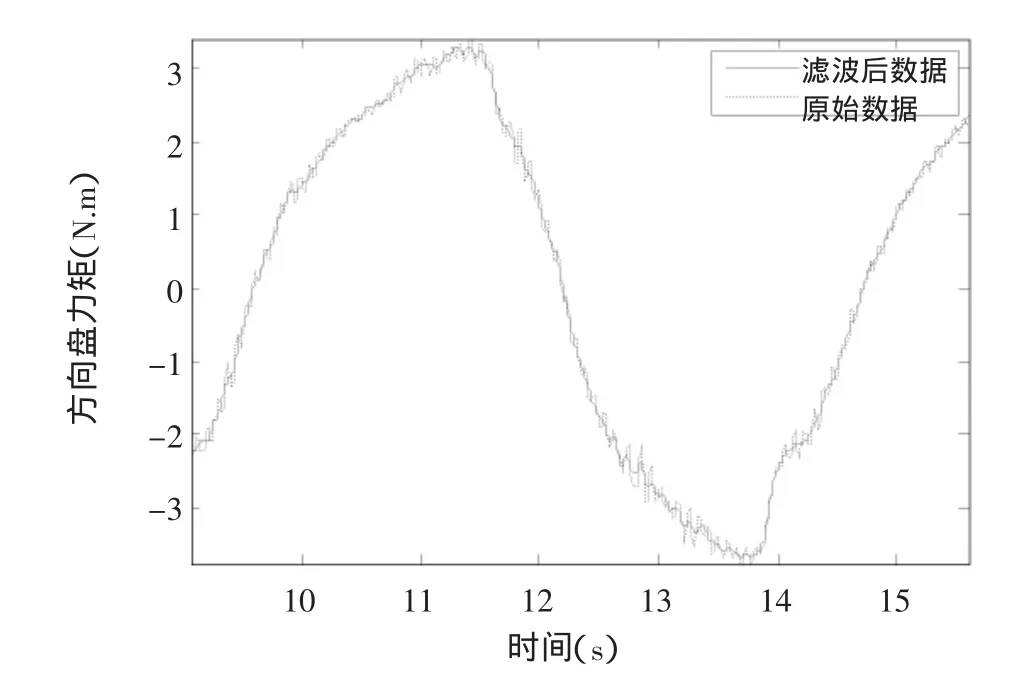
圖5 無相移濾波
2.5 提取數據段擬合處理
以方向盤轉角為例,在連續正弦的方向盤轉角數據中選取用于指標提取的4個周期信號共8個數據段,4段是左轉工況,4段是右轉工況(如圖6所示),MATLAB實現程序如下:
對滯環曲線的左轉和右轉分別進行多項式擬合,得到擬合函數nh1和nh2。


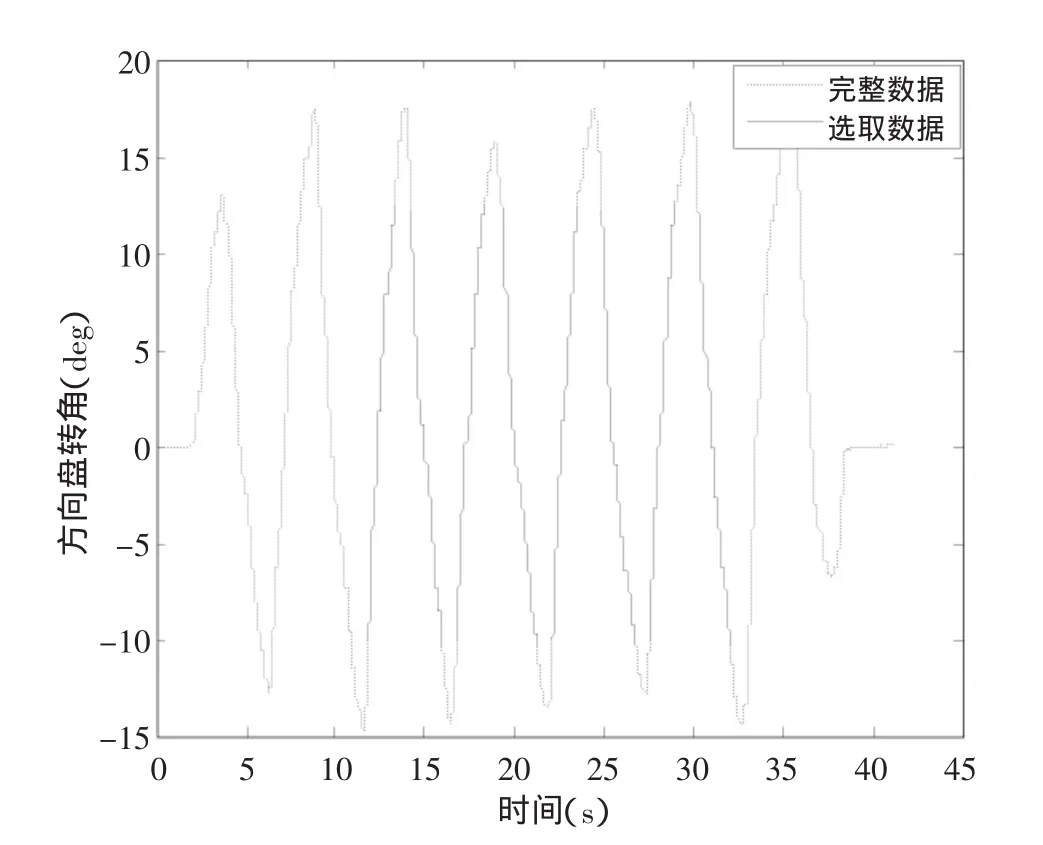
圖6 試驗數據的選取
2.6 提取評價指標
下面以方向盤力矩與方向盤轉角關系曲線為例來說明評價指標的提取。
2.6.1 提取方向盤力矩遲滯
方向盤力矩遲滯是方向盤轉角為0時的方向盤力矩,使用取值函數y=polyval(p,x),p是函數,x是自變量,對左右轉擬合函數nh1和nh2取值即可得到方向盤力矩遲滯。MATLAB實現程序如下:

2.6.2 提取方向盤轉角遲滯
方向盤轉角遲滯是方向盤力矩為0時對應的方向盤轉角,對左右轉擬合函數分別求根。擬合函數階次的不同會產生多個復數或實數根,要從根矩陣中提取出有效根。提取原則是有效根屬于實數且大于區間A橫軸的最小值小于區間A橫軸的最大值。MATLAB實現程序如下:
2.6.3 提取中間位置轉向剛度
使用求導函數k=polyder(p)對左右轉滯環曲線擬合函數nh1和nh2求導函數,對導函數取值,當x等于0時,y值即為中間位置轉向剛度。此種方法通過更改自變量x后同樣可以提取側向加速度為1m/s2時的力矩梯度,求導過程如下:
2.6.4 提取平均轉向剛度
平均轉向剛度是方向盤力矩與方向盤轉角關系曲線中方向盤轉角幅值±10%內曲線的斜率,對左右轉的擬合曲線在轉角±10%范圍內做1次擬合,1次擬合線的斜率即為平均轉向剛度,MATLAB程序實現如下:
2.6.5 提取橫擺角速度響應遲滯
在橫擺角速度和方向盤轉角關系曲線中需要評價橫擺角速度響應遲滯,由于這兩個參數都是時域內的周期信號,所以可以利用兩信號之間互相關函數計算得到橫擺角速度的時間滯后,當兩信號的互相關系數為最大時,所對應的時移乘以采樣頻率即為兩信號之間的滯后時間(如圖7所示)[3],實現程序如下:
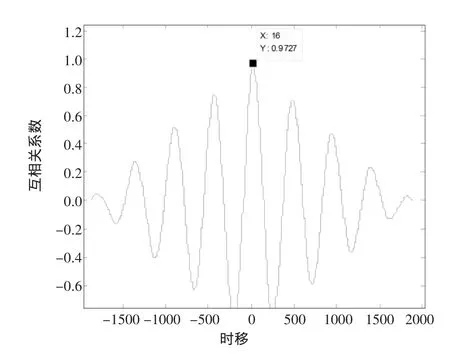
圖7 橫擺角速度與方向盤轉角互相關系數

2.7 結果輸出
指標提取完成后輸出相關指標,繪制結果曲線如圖8所示,輸出評價指標見表1,結果輸出程序如下:
中間位置其他指標的提取方法和以上介紹的方法相同,可以參考使用,至此完成了全部中間位置數據程序的編制。
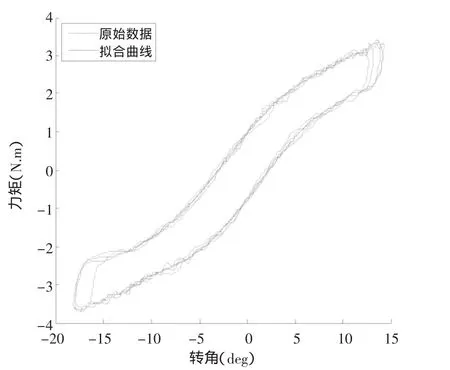
圖8 方向盤力矩-轉角關系曲線
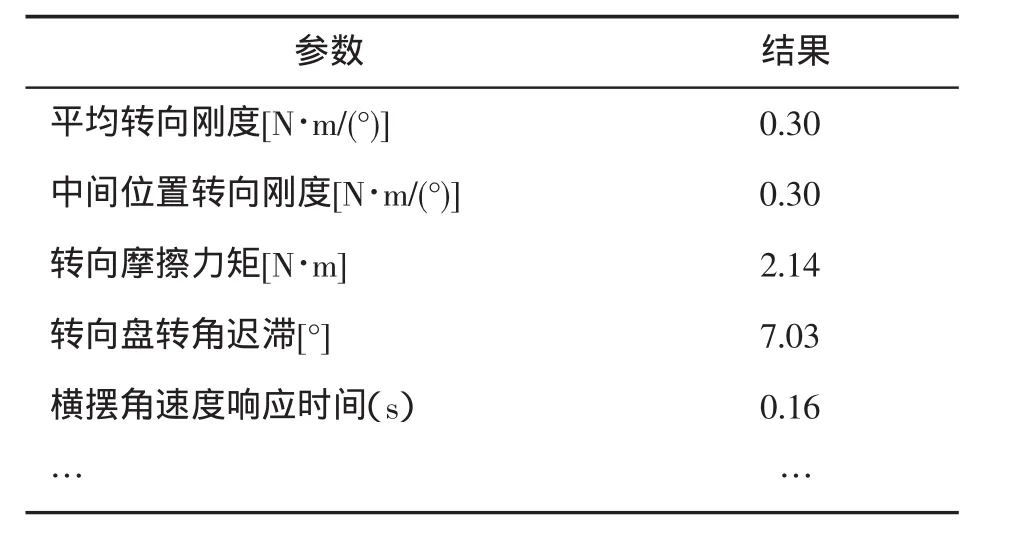
表1 評價指標
3 結束語
本文基于MATLAB軟件完成了對中間位置試驗從數據讀取、消除趨勢項、無相移濾波到指標提取處理過程的編程,避免了人工處理產生錯誤的可能,大大提高了數據處理效率和數據的準確度,有效支撐了車輛操穩性能的開發。
[1]GB/6323-2014,汽車操縱穩定性試驗方法[S].2014:31-32.
[2]孫祥,徐流美,吳清.matlab7.0基礎教程[M].北京:清華大學出版社,2005:362-365.
[3]王長青.乘用車中心區操縱穩定性客觀評價指標體系研究[D].長春:吉林大學,2012:51-52.
Handling on the center data processing based on MATLAB’s stability
ZHANG Zhao-lei1,2
(1.Great Wall Motor Company Technical Center,Hebei Baoding 071000,China;2.Hebei Automobile Engineering Technology Research Center,Hebei Baoding 071000,China)
The center data processing program is compiled based on MTALAB.By the end of data continuous sine curve linear fitting error trend,the original data is corrected; A low pass filter without phase shift is designed to wave filtering of raw data,it avoids the phase delay between the signals;A program is designed to extract the range of the specified data from four continuous sine curves,the fitting function of four hysteresis cures of steering wheel angle and steering wheel torque is obtained.The steering wheel angle hysteresis,steering wheel torque hysteresis,intermediate position steering stiffness and other indicators are extracted; Cross correlation calculation of steering wheel angle and yaw rate,get the yaw rate response time.Results show: Through the use of these data processing methods,ensure the accuracy of the results,improve the efficiency of data processing.
MATLAB;center;filter;data processing
TP274
A
1673-2022(2017)01-0063-05
2016-10-18
張朝雷(1984-),男,河北趙縣人,助理工程師,研究方向為汽車操縱動力學。
猜你喜歡
中學生數理化·自主招生(2022年9期)2022-05-30 10:48:04
心理學報(2022年4期)2022-04-12 07:38:02
水泵技術(2021年3期)2021-08-14 02:09:20
電子測試(2018年4期)2018-05-09 07:28:12
當代化工研究(2016年9期)2016-03-20 16:22:13
中國慣性技術學報(2015年1期)2015-12-19 13:12:17
計算機工程(2015年4期)2015-07-05 08:28:04
西華師范大學學報(自然科學版)(2015年3期)2015-02-27 15:31:22
聯合國青年技術培訓(2014年7期)2014-04-12 00:00:00
中國質量與標準導報(2014年7期)2014-02-28 22:24:35