半掛運輸車輛橫向穩(wěn)定性控制
2017-04-08 06:49:21邱緒云李建英彭月明
山東交通學(xué)院學(xué)報 2017年1期
關(guān)鍵詞:模型
邱緒云,李建英,彭月明
(1.山東交通學(xué)院汽車工程學(xué)院,山東濟(jì)南 250357;2.廣東汽車檢測中心有限公司,廣東佛山 528061)
半掛運輸車輛橫向穩(wěn)定性控制
邱緒云1,李建英1,彭月明2
(1.山東交通學(xué)院汽車工程學(xué)院,山東濟(jì)南 250357;2.廣東汽車檢測中心有限公司,廣東佛山 528061)
基于系統(tǒng)動力學(xué)仿真軟件ADAMS建立半掛運輸車輛動力學(xué)仿真模型,并將車輛模型仿真結(jié)果與實車試驗結(jié)果進(jìn)行對比分析,驗證車輛模型的有效性。基于模糊PID控制技術(shù),以半掛運輸車輛的折疊角速度和折疊角加速度為控制變量設(shè)計模糊PID控制器,通過單移線仿真試驗進(jìn)行ADAMS與MATLAB的聯(lián)合仿真分析,結(jié)果表明:半掛運輸車輛的橫擺角速度、側(cè)向加速度和折疊角均有不同程度的改善,半掛運輸車輛的行駛穩(wěn)定性得到提高。
半掛運輸車輛;橫向穩(wěn)定性;車輛動力學(xué)模型;模糊PID控制;聯(lián)合仿真
半掛運輸車輛裝載質(zhì)量大、單位貨物質(zhì)量的燃油消耗量低、運輸效率高[1-3],而且具有甩掛運輸?shù)膬?yōu)勢,以半掛運輸車輛為代表的重型貨車在交通運輸行業(yè)占有的比例越來越大,但半掛運輸車輛由于質(zhì)心位置高、車身長、輪距較小等[4-6],在高速行駛過程中容易發(fā)生側(cè)滑、甩尾、折疊等橫向失穩(wěn)現(xiàn)象,一旦發(fā)生交通事故很容易波及其他車輛,造成人員傷亡和財產(chǎn)損失。
目前,國內(nèi)外學(xué)者對半掛運輸車輛橫向穩(wěn)定性的研究較少[7-9]。本文基于ADAMS建立半掛運輸車輛仿真模型,根據(jù)模糊PID控制理論設(shè)計模糊PID控制器,以半掛運輸車輛折疊角速度與折疊角加速度為控制器的輸入變量,半掛運輸車輛橫向控制力為控制器的輸出變量,通過對車輛橫向控制力的控制,達(dá)到提高車輛橫向穩(wěn)定性的目的。
1 建立整車動力學(xué)仿真模型
在ADAMS/Car中建立半掛運輸車輛整車動力學(xué)仿真模型,車輛模型參數(shù)如表1所示[10-12]

表1 車輛模型參數(shù)
整車模型包括牽引車前懸架系統(tǒng)、牽引車后懸架系統(tǒng)、半掛車懸架系統(tǒng)、輪胎模型、轉(zhuǎn)向系統(tǒng)及車身等。該車輛模型中,牽引車前懸架系統(tǒng)為非獨立式轉(zhuǎn)向懸架,牽引車后懸架系統(tǒng)與半掛車懸架系統(tǒng)均為平衡懸架。輪胎模型采用PAC2002輪胎,PAC2002輪胎模型適用于各種工況下的仿真試驗,是車輛穩(wěn)定性仿真的理想輪胎模型[13-14]。牽引車前橋采用單輪結(jié)構(gòu),牽引車雙驅(qū)動橋與半掛車支持橋均采用雙輪結(jié)構(gòu)。動力傳動系統(tǒng)與轉(zhuǎn)向子系統(tǒng)均采用ADAMS中已建立的系統(tǒng)模板。由子系統(tǒng)裝配完成的半掛運輸車輛仿真模型如圖1所示。
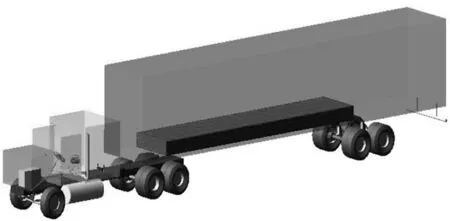
圖1 半掛運輸車輛動力學(xué)仿真模型
2 驗證車輛仿真模型
為了驗證所建立半掛運輸車輛模型的準(zhǔn)確性,參考文獻(xiàn)[15]中的一組實車側(cè)向穩(wěn)定性試驗數(shù)據(jù),在ADAMS/Car中對車輛模型設(shè)置相同的參數(shù)及仿真試驗條件,將得出的仿真試驗數(shù)據(jù)與實車試驗數(shù)據(jù)進(jìn)行對比。
試驗車輛以30 km/h的速度在半徑為25 m的固定圓周上勻速行駛,測試車輛在試驗工況下側(cè)向加速度、橫擺角速度的穩(wěn)態(tài)響應(yīng),其穩(wěn)態(tài)響應(yīng)曲線如圖2a)、3a)所示。車輛模型仿真試驗結(jié)果如圖2b)、3b)所示。
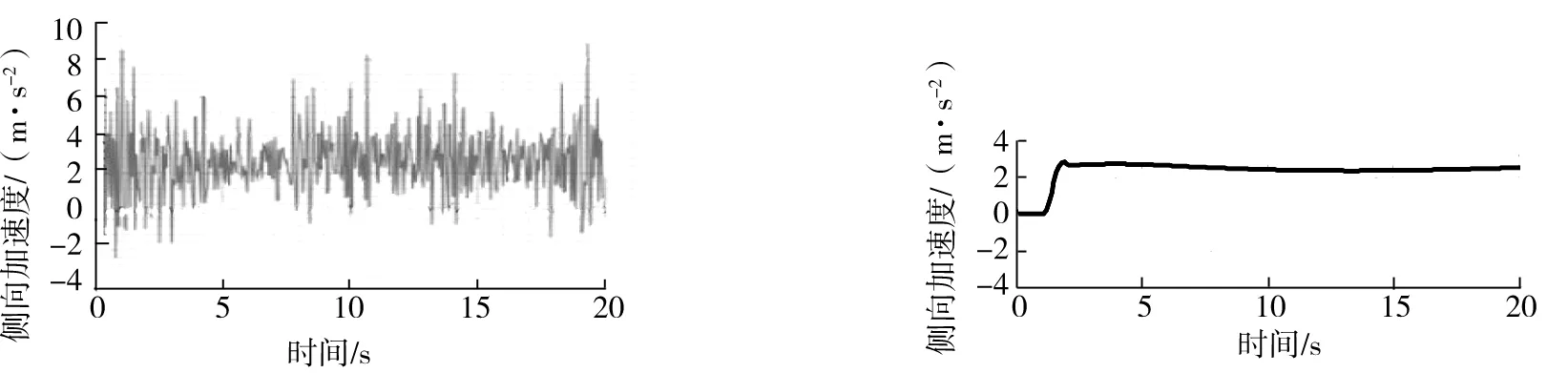
a) 試驗 b) 仿真圖2 半掛運輸車輛側(cè)向加速度隨時間的變化曲線
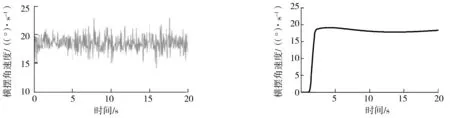
a) 試驗 b) 仿真圖3 半掛運輸車輛橫擺角速度隨時間的變化曲線
由圖2~3可以看出:仿真與試驗車輛的側(cè)向加速度響應(yīng)、橫擺角速度響應(yīng)結(jié)果基本吻合,驗證了所建半掛運輸車輛模型的合理性與有效性。
3 設(shè)計模糊PID控制器
在MATLAB的Simulink環(huán)境下,進(jìn)行半掛運輸車輛模糊PID控制器的設(shè)計。模糊PID控制器以半掛運輸車輛的折疊角速度ω、折疊角加速度α兩個指標(biāo)作為輸入變量,設(shè)ωI為折疊角速度ω的輸入信號,αI為折疊角加速度α的輸入信號,如圖4所示。采用7個語言模糊子集將輸入變量進(jìn)行模糊化[16-19],7個模糊子集分別為NB(負(fù)大)、NM(負(fù)中)、NS(負(fù)小)、Z(零)、PS(正小)、PM(正中)、PB(正大)。PID控制器的比例系數(shù)修正量ΔKp、積分系數(shù)修正量ΔKi、微分系數(shù)修正量ΔKd作為模糊邏輯控制器的輸出變量,采用7個語言模糊子集NB、NM、NS、Z、PS、PM、PB將輸出變量進(jìn)行模糊化,形成2輸入3輸出模糊控制器模型。在MATLAB模糊編輯器中分別創(chuàng)建ΔKp、ΔKi、ΔKd的模糊控制規(guī)則,然后與PID控制器的比例環(huán)節(jié)、積分環(huán)節(jié)和微分環(huán)節(jié)相結(jié)合,設(shè)計模糊PID控制器,如圖5所示。模糊PID控制器輸出隨ω、α變化的車輛橫向控制力Fy。

a)ΔKp b)ΔKi c)ΔKd圖4 ΔKp、ΔKi、ΔKd的模糊規(guī)則
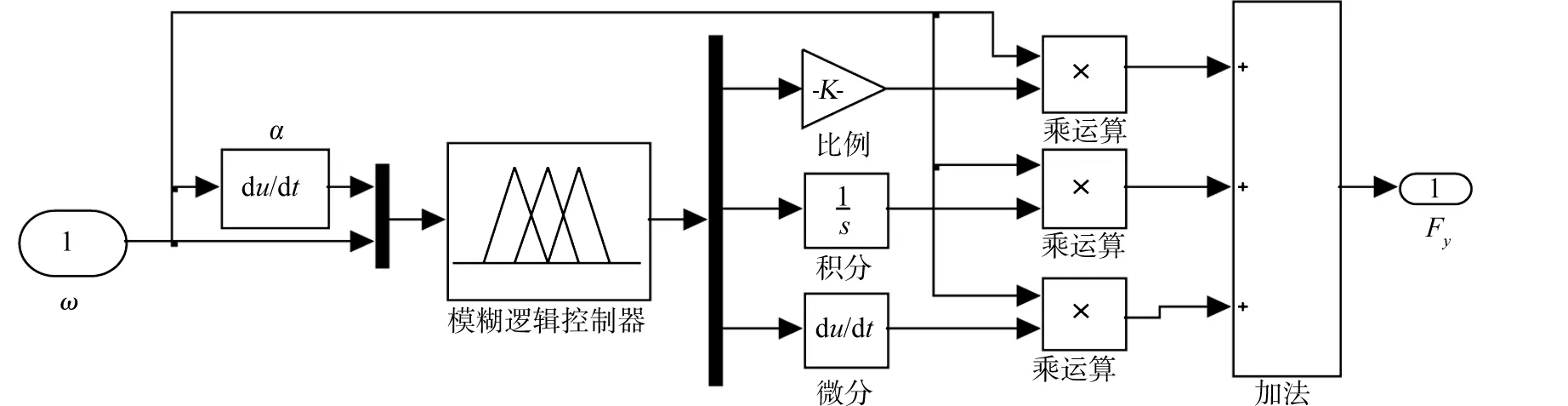
圖5 模糊PID控制器
4 建立聯(lián)合仿真模型
ADAMS與MATLAB聯(lián)合仿真的核心是輸入變量與輸出變量數(shù)據(jù)的實時交換。由于ADAMS與MATLAB之間的數(shù)據(jù)交換是通過狀態(tài)變量實現(xiàn)的,要實現(xiàn)聯(lián)合仿真,首先定義半掛運輸車輛模型的輸出、輸入狀態(tài)變量。在圖1的半掛運輸車輛模型的牽引車后驅(qū)動車橋與半掛車支持車橋中設(shè)置橫向的力源(橫向控制力Fy),將Fy作為半掛運輸車的輸入狀態(tài)變量,ω、α作為輸出狀態(tài)變量。然后通過ADAMS中的Control模塊將半掛運輸車輛仿真模型從ADAMS中導(dǎo)出,生成3個后綴名分別是.m、.cmd、.adm的目標(biāo)文件。
將半掛運輸車輛模型生成的目標(biāo)文件調(diào)入MATLAB軟件中[20-21],在MATLAB命令窗口輸入adams_sys命令生成圖6中左側(cè)的半掛運輸車輛仿真模型模塊,該模塊與圖5所示的模糊PID控制器連接,ω、α作為模糊PID控制器的輸入變量,F(xiàn)y作為模糊PID控制器的輸出變量,建立ADAMS與MATLAB聯(lián)合仿真平臺如圖6所示。
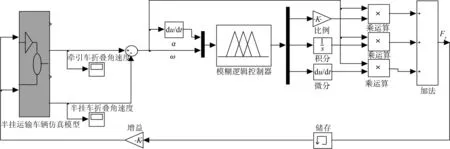
圖6 聯(lián)合仿真模型
5 仿真分析
選取單移線工況進(jìn)行仿真試驗。單移線仿真試驗工況設(shè)置:路面附著系數(shù)為1,車輛以80 km/h的速度直線行駛5 s時輸入的方向盤轉(zhuǎn)角如圖7所示。在仿真試驗中模糊PID控制器輸出Fy的響應(yīng)曲線如圖8所示。通過橫向控制力調(diào)節(jié)的半掛運輸車輛的折疊角速度、折疊角響應(yīng)曲線與未加橫向力控制的折疊角速度、折疊角響應(yīng)曲線對比如圖9~10所示。牽引車及掛車在有無控制的2種情況下,橫擺角速度、側(cè)向加速度響應(yīng)曲線的變化趨勢如圖11~14所示。
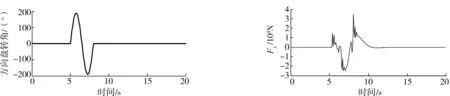
圖7 方向盤轉(zhuǎn)角時間響應(yīng)曲線 圖8 車輛橫向控制力時間響應(yīng)曲線
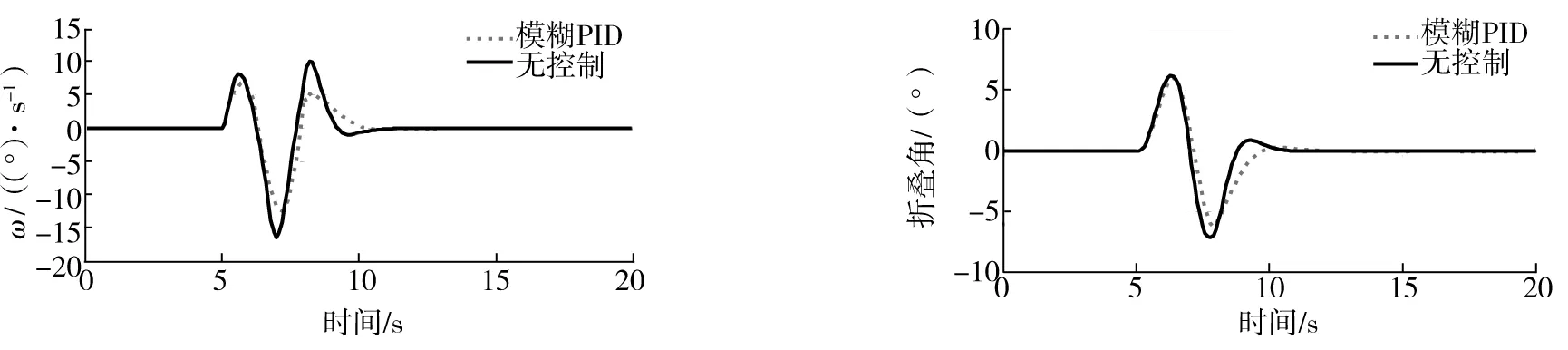
圖9 半掛運輸車輛折疊角速度時間響應(yīng)曲線 圖10 半掛運輸車輛折疊角時間響應(yīng)曲線

圖11 牽引車橫擺角速度時間響應(yīng)曲線 圖12 掛車橫擺角速度時間響應(yīng)曲線

圖13 牽引車側(cè)向加速度時間響應(yīng)曲線 圖14 掛車側(cè)向加速度時間響應(yīng)曲線
由圖8可以看出,控制器能夠根據(jù)車輛的運行狀況判斷所需要輸出Fy的大小及方向。由圖9~10可以看出:通過控制器的調(diào)節(jié),半掛運輸車輛的折疊角速度的3個峰值均有不同程度的減小,第3個峰值由10 (°)/s減小至5 (°)/s,在仿真8 s之后,車輛的折疊角速度沒有反向的波動,而且曲線的變化較為平緩,從而平穩(wěn)的恢復(fù)至穩(wěn)定狀態(tài),說明車輛的橫向擺振得到有效控制;半掛運輸車輛的折疊角也有明顯的減小,在仿真8 s之后,車輛的折疊角沒有反向值,同時曲線的變化較為平緩,說明車輛的橫向擺振得到有效控制。
由圖11~12可以看出:通過控制器的調(diào)節(jié)作用,牽引車橫擺角速度的2個峰值有不同程度的降低;掛車橫擺角速度的2個峰值均有不同程度的降低,第2個峰值由16 (°)/s減小至13 (°)/s,在仿真8 s之后,掛車的橫擺角速度沒有反向值,說明該控制策略對掛車甩尾具有抑制作用,同時曲線的變化較為平緩,直至穩(wěn)定狀態(tài)。
由圖13~14可以看出:通過控制器的調(diào)節(jié)作用,牽引車側(cè)向加速度的2個峰值均有不同程度的減小,第2個峰值由4 m/s2減小至2.5 m/s2,在仿真8 s之后,牽引車側(cè)向加速度曲線的變化較為平緩;通過控制器的調(diào)節(jié)作用,掛車側(cè)向加速度的2個峰值均有不同程度的減小,第2個峰值由5 m/s2減小至3.75 m/s2,在仿真8 s之后,掛車側(cè)向加速度的變化較為平緩,并且沒有反向值,說明該控制策略對掛車甩尾具有抑制作用。
6 結(jié)論
1)基于ADAMS建立了半掛運輸車輛動力學(xué)模型,將模型仿真結(jié)果與實車試驗結(jié)果對比,證明所建模型正確。
2)基于模糊PID控制技術(shù),以折疊角速度和折疊角加速度為控制變量設(shè)計模糊PID控制器,建立ADAMS與MATLAB聯(lián)合仿真平臺,進(jìn)行單移線仿真試驗,結(jié)果表明:半掛運輸車輛的折疊角速度及折疊角以及牽引車與半掛車的橫擺角速度、側(cè)向加速度均有不同程度的改善,半掛運輸車輛的行駛穩(wěn)定性得到提高。
[1]中華人民共和國交通運輸部.2014年交通運輸行業(yè)發(fā)展統(tǒng)計公報[EB/OL].(2015-04-30)[2015-11-30].http://www.moc.gov.cn/zfxxgk/bnssj/zhghs/201504/t20150430_1810598.html.
[2]孟莉.大數(shù)據(jù)揭開中國高速公路貨車真相[N/OL].中國汽車報,(2014-10-15)(1)[2016-03-12].http://www.cnautonews.com/tebd/201410/t20141014-329025.htm.
[3]董金松.半掛汽車列車彎道制動行駛方向穩(wěn)定性及協(xié)調(diào)控制策略研究[D].長春:吉林大學(xué),2010. DONG Jinsong.Driving directional stability and brake compatibility control strategy of tractor-semitrailer braking in a turn[D].Changchun:Jilin University,2010.
[4]許洪國,劉宏飛.汽車列車橫向穩(wěn)定性研究[J].公路交通科技,2006,23(2):141-146. XU Hongguo,LIU Hongfei.Overview of tractor trailer lateral stability study[J].Journal of Highway and Transportation Research and Development,2006,23(2):141-146.
[5]任熙華.基于ADAMS/CAR的重型半掛牽引車性能仿真研究[D].哈爾濱:哈爾濱工業(yè)大學(xué),2010. REN Xihua.Simulation research on the heavy semitraler towing vehicle based on ADAMS/CAR[D].Harbin:Harbin Institute of Technology,2010.
[6]楊秀建,楊春曦,張弦.基于主動制動的半掛汽車列車橫擺穩(wěn)定性控制[J].汽車工程,2011,33 (6):486-492. YANG Xiujian,YANG Chunxi,ZHANG Xian.A study on the handling characteristics and lateral stability of tractor-semitrailer combination[J].Automotive Engineering,2011,33(6):486-492.
[7]HYUN D.Predictive modeling and active control of rollover in heavy vehicles[D].Texas:Texas A&M University,2001.
[8]SHAHMIRZADI D,LANGARI R,INTELLIGENT V.Sliding mode control in rollover prevention of tractor-semitrailers[J].International Journal of Vehicle Autonomous Systems,2006(1):68-87.
[9]ELHEMLY M A E,F(xiàn)AYED M A G.Simulation of tractor semitrailer manoeuvre at high speed using MATLAB/Simulink[J].International Journal of Heavy Vehicle Systems,2011,18(40):341-358.
[10]郭健.汽車穩(wěn)定性控制系統(tǒng)控制策略與評價方法研究[D].長春:吉林大學(xué),2011. GUO Jian.Research on control algorithm and performance evaluation method of vehicle electronic stability program[D].Changchun:Jilin University,2011.
[11]彭濤.半掛汽車列車非線性穩(wěn)定性控制[D].長春:吉林大學(xué),2012. PENG Tao.A study on control of nonlinear stability for tractor-semitrailer[D].Changchun:Jilin University,2011.
[12]楊秀建.基于主動制動的半掛汽車列車橫擺穩(wěn)定性控制[J].汽車工程,2011,11(33):955-961. YANG Xiujian.Yaw stability control for tractor-semitrailer combination based on active braking[J].Automotive Engineering,2011,11(33):955-961.
[13]喻凡.汽車系統(tǒng)動力學(xué)[M].北京:機(jī)械工業(yè)版社,2005.
[14]陳軍.ADAMS技術(shù)與工程分析實例[M].北京:中國水利水電出版社,2008.
[15]唐彬.半掛汽車列車橫向穩(wěn)定性仿真分析及綜合評價模型研究[D].北京:交通運輸部公路科學(xué)研究院,2015. TANG Bin.Research on simulation analysis on lateral stability of tractor-semitrailer and comprehensive evaluation model[D].Beijing:Research Institute of Highway Ministry of Transport,2015.
[16]房永.三軸半掛汽車列車穩(wěn)定性控制算法研究[D].長春:吉林大學(xué),2010. FANG Yong.Research of stability controi algrithm for triaxiai tractor semitrailer[D].Changchun:Jilin University,2010.
[17]李臣,李興虎.半掛汽車列車轉(zhuǎn)彎制動穩(wěn)定性模糊控制[J].公路交通科技,2014(11): 147-152. LI Chen,LI Xinghu.Fuzzy control of tractor-semitrailer cornering braking stability[J].Journal of Highway and Transportation Research and Development,2014(11):147-152.
[18]劉金琨.智能控制[M].北京:電子工業(yè)出版社,2014.
[19]殷云華.自適應(yīng)模糊PID控制器的設(shè)計和仿真[J].火力與指揮控制,2008,33(7):97-99. YIN Yunhua.The design and simulation of adaptive fuzzy PID controller[J].Fire Control and Command Control,2008,33(7):97-99.
[20]宋宇,陳無畏.基于ADAMS與MATLAB的車輛穩(wěn)定性控制聯(lián)合仿真研究[J].機(jī)械工程學(xué)報,2011,16(47):86-92. SONG Yu,CHEN Wuwei.Study on co-simulation of vehicle stability control based on ADAMS and MATLAB[J].Journal of Mechanical Engineering,2011,16(47):86-92.
[21]馬如奇,郝雙暉.基于MATLAB與ADAMS的機(jī)械臂聯(lián)合仿真研究[J].機(jī)械設(shè)計與制造,2010,4(4):93-95. MA Ruqi,HAO Shuanghui.Research on coordinated simulation of robot arm based on MATLAB and ADAMS[J].Machinery Design & Manufacture,2010,4(4):93-95.
(責(zé)任編輯:楊秀紅)
Lateral Stability Control of Semi-Trailer Transportation Vehicle
QIUXuyun1,LIJianying1,PENGYueming2
(1.SchoolofAutomobileEngieering,ShandongJiaotongUniversity,Jinan250357,China;2.GuangdongAutomobileInspectionCenterCo.,Ltd.,Foshan528061,China)
The ADAMS, a kind of vehicle system dynamics simulation software, is used to establish a dynamics simulation model of the semi-trailer transport vehicle. Then, the simulation result of the vehicle model is contrasted with the actual driving test to verify the validity of the simulation model. Based on the fuzzy PID control algorithm, the fuzzy PID controller is designed,according to the acceleration and velocity of the semi-trailer transport vehicle as the control variables and the ADAMS and MATLAB collaborative simulation is analyzed by the single lane simulation test. The results show that the yaw rate, lateral acceleration and folding angle of the semi-trailer vehicle are improved to some extent and so is the driving stability of the semi-trailer vehicle.
semi-trailer transport vehicle; lateral stability; vehicle dynamics model; fuzzy PID control; collaborative simulation
2016-09-22
交通運輸部項目(2013319817190);山東省重點研發(fā)計劃項目(2015GGX105010)
邱緒云(1977—),男,山東臨沂人,教授,工學(xué)博士,主要研究方向為車輛系統(tǒng)動力學(xué)及仿真, E-mail:qiuxuyun@163.com.
10.3969/j.issn.1672-0032.2017.01.001
U469.5
A
1672-0032(2017)01-0001-06
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網(wǎng)絡(luò)安全與數(shù)據(jù)管理(2022年1期)2022-08-29 03:15:20
導(dǎo)航定位學(xué)報(2022年4期)2022-08-15 08:27:00
中學(xué)生數(shù)理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀(jì)智能(數(shù)學(xué)備考)(2021年9期)2021-11-24 01:14:36
成都醫(yī)學(xué)院學(xué)報(2021年2期)2021-07-19 08:35:14
新世紀(jì)智能(數(shù)學(xué)備考)(2020年9期)2021-01-04 00:25:14
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(2020年2期)2020-06-02 11:29:24
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
