傾轉(zhuǎn)旋翼結(jié)構(gòu)動力學(xué)設(shè)計技術(shù)研究
2017-04-10 09:37:39喻國瑞賈良現(xiàn)
直升機技術(shù) 2017年1期
喻國瑞,賈良現(xiàn),黃 珺
(中國直升機設(shè)計研究所,江西 景德鎮(zhèn) 333001)
傾轉(zhuǎn)旋翼結(jié)構(gòu)動力學(xué)設(shè)計技術(shù)研究
喻國瑞,賈良現(xiàn),黃 珺
(中國直升機設(shè)計研究所,江西 景德鎮(zhèn) 333001)
通過先進氣動外形縮比傾轉(zhuǎn)旋翼的動力學(xué)設(shè)計,對傾轉(zhuǎn)旋翼結(jié)構(gòu)動力學(xué)設(shè)計中的特殊問題和重點問題形成了系統(tǒng)的研究,并提出了傾轉(zhuǎn)旋翼結(jié)構(gòu)動力學(xué)的工程設(shè)計準(zhǔn)則和設(shè)計方法;基于該準(zhǔn)則和方法設(shè)計的縮比傾轉(zhuǎn)旋翼已用于風(fēng)洞試驗。
傾轉(zhuǎn)旋翼;旋翼動力學(xué);設(shè)計技術(shù)
0 引言
傾轉(zhuǎn)旋翼機是一種同時具備直升機、固定翼飛機特點的新型飛行器。當(dāng)其旋翼處于垂直位置時,傾轉(zhuǎn)旋翼機類似于雙旋翼橫列式直升機,可懸停、側(cè)飛、后飛、垂直起降,此時它的單位功率起降重量接近典型直升機;當(dāng)旋翼處于水平位置時,傾轉(zhuǎn)旋翼機就相當(dāng)于固定翼飛機,能作高速遠(yuǎn)程飛行。因此,傾轉(zhuǎn)旋翼已成為未來最具發(fā)展前景的飛行器之一[1]。
旋翼是傾轉(zhuǎn)旋翼機的主要升力系統(tǒng)(直升機模式)、推進系統(tǒng)(飛機模式)和重要飛行控制執(zhí)行系統(tǒng),在工程設(shè)計中占有重要地位。在傾轉(zhuǎn)旋翼設(shè)計的第一階段,須非常謹(jǐn)慎地對旋翼動力學(xué)部件進行結(jié)構(gòu)動力學(xué)特性設(shè)計,這項工作與槳葉對于周期諧波載荷的動力學(xué)響應(yīng)密切相關(guān)[2],設(shè)計的好壞直接關(guān)系到結(jié)構(gòu)的振動和壽命。
傾轉(zhuǎn)旋翼結(jié)構(gòu)動力學(xué)設(shè)計技術(shù)是指運用現(xiàn)代設(shè)計理論,結(jié)合經(jīng)驗,經(jīng)過創(chuàng)造性的思維、規(guī)劃及合理的設(shè)計計算,使旋翼結(jié)構(gòu)動力學(xué)設(shè)計滿足傾轉(zhuǎn)旋翼功能和性能要求的技術(shù)。本文基于先進氣動外形傾轉(zhuǎn)旋翼的設(shè)計,研究總結(jié)了傾轉(zhuǎn)旋翼結(jié)構(gòu)動力學(xué)設(shè)計的重要內(nèi)容和方法,完成的先進氣動外形縮比傾轉(zhuǎn)旋翼已成功用于風(fēng)洞試驗。
1 設(shè)計技術(shù)研究
本文首先研究總結(jié)了影響傾轉(zhuǎn)旋翼結(jié)構(gòu)動力學(xué)設(shè)計的特殊因素和旋翼的構(gòu)型選擇問題,之后研究了槳葉等效邊界條件和動力學(xué)建模方法,并基于該方法研究了旋翼槳葉的耦合模態(tài),最后總結(jié)研究了調(diào)頻設(shè)計準(zhǔn)則(圖1)。
1.1 影響結(jié)構(gòu)動力學(xué)設(shè)計的特殊因素
傾轉(zhuǎn)旋翼機特殊的工況及氣動外形是造成其結(jié)構(gòu)動力學(xué)設(shè)計特殊性的來源,貫穿整個旋翼結(jié)構(gòu)動力學(xué)設(shè)計。
1.1.1 特殊工況
傾轉(zhuǎn)旋翼機具有飛機和直升機兩種飛行模式,因此其旋翼具備了多種特殊工況,經(jīng)過設(shè)計梳理,兩種模式下對旋翼結(jié)構(gòu)動力學(xué)設(shè)計有重要影響的工況為:
1) 具有2個工作轉(zhuǎn)速。傾轉(zhuǎn)旋翼機為實現(xiàn)較高前飛推進效率,在飛機模式下旋翼轉(zhuǎn)速會較直升機模式時低。通常,飛機模式旋翼轉(zhuǎn)速比直升機模式降低約25%~40%[3]。
2) 旋翼工作總距范圍大。在直升機模式時,一般使用總距不會超過15°,而在飛機模式時,總距能達(dá)到35°~ 60°[4]。
3) 氣動環(huán)境差異性大。在直升機模式時,旋翼的入流不垂直于槳盤平面,存在明顯的周期氣動激勵,旋翼具有周期變距功能,在無窮遠(yuǎn)處垂直于槳盤的氣流速度為0;而對于飛機模式,旋翼入流則垂直于槳盤平面,旋翼無需周期變距,無窮遠(yuǎn)處垂直于槳盤的氣流速度為前飛速度。
1.1.2 特殊氣動外形
旋翼氣動性能主要取決于旋翼槳葉的氣動外形,而傾轉(zhuǎn)旋翼的特殊氣動外形對旋翼結(jié)構(gòu)動力學(xué)設(shè)計有著重要影響。旋翼槳葉氣動外形的特殊性如下:
1) 為兼顧懸停和前飛時的旋翼性能,其槳葉結(jié)構(gòu)扭角可達(dá)40deg甚至更大;
2) 旋翼實度大于常規(guī)直升機,達(dá)到0.14甚至更高,這就使得相同旋翼半徑下,槳葉的結(jié)構(gòu)絕對厚度更大。
這樣的槳葉外形結(jié)合特殊的旋翼轉(zhuǎn)速設(shè)計能夠優(yōu)化來流攻角,保證直升機模式與飛機模式均具有合理的升力(拉力)、阻力特性,但這正是傾轉(zhuǎn)旋翼結(jié)構(gòu)動力學(xué)設(shè)計特殊性的重要來源(圖2)。
1.2 旋翼構(gòu)型選擇
旋翼構(gòu)型選擇則決定了動力學(xué)設(shè)計技術(shù)研究的方向,是后續(xù)研究的基礎(chǔ)。不同旋翼構(gòu)型具有不同的旋翼動力學(xué)特性,其設(shè)計分析方法也隨之不同。傾轉(zhuǎn)旋翼機存在直升機模式、飛機模式以及兩種模式切換的過渡飛行狀態(tài);在飛機模式下旋翼轉(zhuǎn)速降低25%~40%,旋翼離心力作用明顯降低,采用傳統(tǒng)鉸接式旋翼會形成一個較大的穩(wěn)態(tài)錐度角,降低飛機模式下旋翼的推進效率。此外,傾轉(zhuǎn)旋翼安裝在機翼端部,從安全性考慮,須保證在過渡狀態(tài)和飛機模式下,旋翼受到擾動后槳葉不產(chǎn)生過大揮舞。因此,傾轉(zhuǎn)旋翼須使用一種揮舞較為剛硬的旋翼。另一方面,機翼是典型的柔性支持系統(tǒng),因此傾轉(zhuǎn)旋翼的構(gòu)型選擇應(yīng)考慮盡可能降低柔性支持系統(tǒng)帶來的耦合影響,如:地面共振、回轉(zhuǎn)顫振等問題。
經(jīng)過設(shè)計梳理,傾轉(zhuǎn)旋翼機旋翼構(gòu)型選擇應(yīng)主要考慮四個方面:
1) 盡量避免各種飛行姿態(tài)下槳葉出現(xiàn)過大揮舞;
2) 盡量提高飛機模式下旋翼的推進效率(此時旋翼作為推進系統(tǒng));
3) 從構(gòu)型上盡可能多地消除不穩(wěn)定可能性,降低設(shè)計復(fù)雜度和風(fēng)險;
4) 盡量降低槳葉根部結(jié)構(gòu)載荷以提高結(jié)構(gòu)壽命。
當(dāng)前我國的傾轉(zhuǎn)旋翼在構(gòu)型上宜采用萬向鉸式旋翼。從結(jié)構(gòu)設(shè)計、新材料、主動控制技術(shù)的發(fā)展來看,若未來能在技術(shù)上解決上述需求,則旋翼構(gòu)型選擇將更加靈活。本文中的傾轉(zhuǎn)旋翼設(shè)計就使用了三片槳葉萬向鉸旋翼(圖3)。
萬向鉸構(gòu)型的旋翼沒有獨立的水平鉸,無擺振鉸,容易設(shè)計成擺振剛硬旋翼,避免了傾轉(zhuǎn)旋翼復(fù)雜的地面共振問題,弱化了旋翼旋轉(zhuǎn)面內(nèi)模態(tài)與支持系統(tǒng)的耦合;另一方面,萬向鉸旋翼能保證飛機模式時旋翼具有較小的穩(wěn)態(tài)錐度角。此外,萬向鉸旋翼的動載荷相對無鉸旋翼更小,對槳葉根部的受載有利;其槳盤傾斜直接由旋轉(zhuǎn)平面傾斜完成,不會造成擺振面內(nèi)的科氏力,這對于前飛狀態(tài)非常有利[5]。
1.3 動力學(xué)建模
為計算分析旋翼動力學(xué)特性,需對傾轉(zhuǎn)旋翼進
行動力學(xué)建模。傾轉(zhuǎn)旋翼槳葉通常具有40°以上的結(jié)構(gòu)負(fù)扭轉(zhuǎn),槳轂還可能有一定的預(yù)錐角,槳葉通常還具有一定的上反角、下反角及比較大的后掠角,槳葉結(jié)構(gòu)復(fù)雜。本文對傾轉(zhuǎn)旋翼動力學(xué)建模如下:
1)將槳葉離散為一系列的具有不同上反下反角及前略后掠角的Eurler-Bernoulli直梁單元,各梁單元的彈性軸為直線,相鄰單元的彈性軸首尾相接。
2)為了方便描述旋轉(zhuǎn)槳葉的空間位置及運動變形,建立一系列的參考坐標(biāo)系,便于使用哈密頓原理導(dǎo)出動力學(xué)方程[6-7]。槳轂坐標(biāo)系以下標(biāo)h標(biāo)識,旋轉(zhuǎn)坐標(biāo)系以下標(biāo)r標(biāo)識,相對槳轂坐標(biāo)系軸旋轉(zhuǎn)ψ方位角。未變形槳葉坐標(biāo)系以下標(biāo)u標(biāo)識,相對旋轉(zhuǎn)坐標(biāo)系Jr軸有βG+βP的仰角,βG為萬向鉸揮舞角,βP為預(yù)錐角。槳葉變距軸線坐標(biāo)系下標(biāo)p,未變形槳葉坐標(biāo)系下標(biāo)c,槳葉單元坐標(biāo)系下標(biāo)k,變形剖面坐標(biāo)系下標(biāo)d。
各坐標(biāo)系間的轉(zhuǎn)換關(guān)系矩陣為:
(1)
(2)
(3)
其中,θcon為控制槳距輸入,Kβ為揮舞變矩調(diào)節(jié)系數(shù),θs為變矩鉸彈性變形。
(4)
其中,Λ1k是后掠角,Λ2k是上反角,Λ3k是結(jié)構(gòu)扭轉(zhuǎn)角。
其中,θt是結(jié)構(gòu)扭轉(zhuǎn)角,φ是彈性扭轉(zhuǎn)角。
3)由哈密頓原理導(dǎo)出傾轉(zhuǎn)旋翼氣彈動力學(xué)方程:
(6)
其中:
(7)
(8)
(9)
(10)
(11)
mb為槳葉線密度
(12)
(13)
(14)
(15)
(16)
(17)
(18)
{Xkio,Ykio,Zkio}T分別為第i片槳葉的第k個單元彈性軸的首節(jié)點在未變形槳葉坐標(biāo)系內(nèi)的位置坐標(biāo);s為單元坐標(biāo)系內(nèi)的局部坐標(biāo);{u,v,w}T為第i片槳葉的第k個單元(s,0,0)處彈性軸的彈性位移;ue為彈性伸長。
4)通過求解該非線性動力學(xué)方程,即可得到傾轉(zhuǎn)旋翼的結(jié)構(gòu)動力學(xué)特性。
1.4 槳葉等效邊界條件
全耦合的3葉萬向鉸旋翼除考慮槳葉自身動力學(xué)問題外,還須考慮槳葉之間的剛?cè)狁詈蟿恿W(xué)問題,使得設(shè)計復(fù)雜化。為簡化模型以適應(yīng)工程設(shè)計,本文將槳葉根部約束邊界條件等效為固支邊界和鉸支邊界來構(gòu)造“周期型”和“集合型”模態(tài),并得到如下結(jié)論:三葉萬向鉸的揮舞不存在絕對的鉸支邊界條件,但存在弱固支約束邊界,一定程度上可近似看成鉸支邊界;其完全的固支邊界條件是存在的。
在旋轉(zhuǎn)坐標(biāo)系中,設(shè)第m片槳葉根部揮舞力矩按級數(shù)展開為:
(19)
設(shè)每片槳葉處在等同的周期氣動環(huán)境中:
(20)
以其中一片槳葉揮舞為基準(zhǔn),在槳轂中心處力矩合成即為該片槳葉總的力矩(揮舞、擺振、扭轉(zhuǎn))。
則揮舞力矩為:
即:
(21)
擺振力矩為:
(22)
操縱載荷為:
(23)
當(dāng)系數(shù)為2時為集合型運動:其擺振運動表現(xiàn)為扭振系統(tǒng)整體頻率,其扭轉(zhuǎn)運動表現(xiàn)為總距操縱剛度下的頻率。
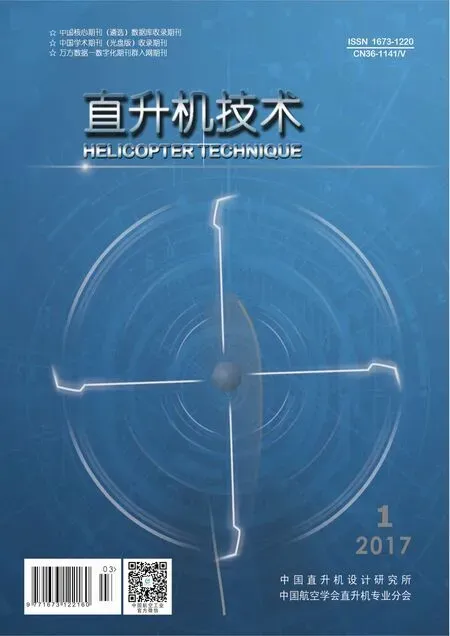
當(dāng)系數(shù)為0時擺振表現(xiàn)為完全固支邊界條件下的頻率,擺振運動支持結(jié)構(gòu)不發(fā)生耦合;扭轉(zhuǎn)表現(xiàn)為與橫/縱向周期操縱剛度匹配的頻率。邊界條件系數(shù)表如表1。
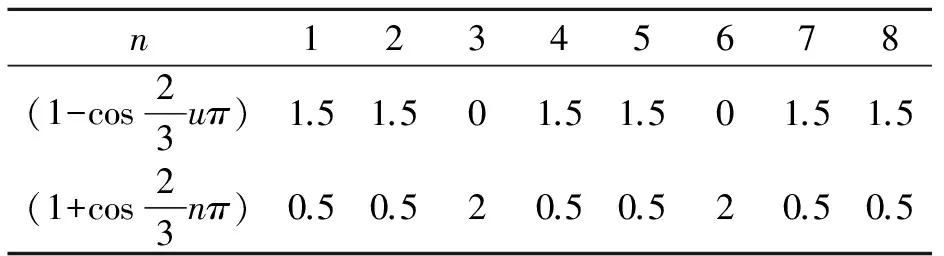
表1 邊界條件系數(shù)表
故當(dāng)n為3的倍數(shù)時,為揮舞為固支邊界條件,當(dāng)n=1、2、4、5、7……時不存在完全鉸接邊界條件,此時系數(shù)為1.5,為近似鉸接的支持條件。因此,三槳葉萬向鉸式傾轉(zhuǎn)旋翼設(shè)計可使用特殊的共振圖(圖4)。
1.5 旋翼槳葉的耦合模態(tài)
槳葉的模態(tài)識別是旋翼結(jié)構(gòu)動力學(xué)分析的重要內(nèi)容,槳葉模態(tài)特性的不同決定了系統(tǒng)的響應(yīng)特性。
研究發(fā)現(xiàn),傾轉(zhuǎn)旋翼大范圍的總距和轉(zhuǎn)速變化,加之槳葉的大結(jié)構(gòu)扭角造成了揮舞模態(tài)、擺振模態(tài)和扭轉(zhuǎn)模態(tài)之間強烈的耦合,這種耦合還伴隨著總距而變化,使得槳葉模態(tài)呈現(xiàn)出特殊性質(zhì)。
圖5和圖7分別為傾轉(zhuǎn)旋翼周期型和集合型模態(tài)中的模態(tài)振型包絡(luò)線,其中第一個case表示-4°總距,最后一個case為52°總距;圖6和圖8分別對應(yīng)了-4°~52°總距范圍內(nèi)周期型和集合型各階模態(tài)頻率變化。可以得到如下規(guī)律:
1) 頻率8Ω以下的周期型第2階、第3階模態(tài),集合型第1階、第2階模態(tài)的揮舞和擺振具有強烈的耦合,不能直接判定其為揮舞模態(tài)或擺振模態(tài),建議稱其耦合模態(tài)。
2) 周期型第2階、第3階模態(tài)均同時表現(xiàn)出揮舞2階和擺振1階模態(tài)的特性。第2階在小總距時以揮舞特性為主,在大總距時以擺振特性為主,第3階在各個總距下?lián)]舞和擺振相當(dāng)。
3) 周期型第2階模態(tài)頻率隨總距升高迅速降低;周期型第3階模態(tài)頻率隨總距升高呈現(xiàn)先迅速提高后迅速降低的規(guī)律;扭轉(zhuǎn)一階頻率在10°以下趨于平穩(wěn),之后隨總距的升高呈現(xiàn)先降低后增高的規(guī)律。周期型第3階和扭轉(zhuǎn)1階頻率變化的拐點十分接近。
4) 集合型則是第1階、第2階模態(tài)同時表現(xiàn)出揮舞和擺振的耦合特征,不同之處在于集合型第1階表現(xiàn)的是揮舞1階和擺振1階的特性,集合型第2階與周期型第3階類似,表現(xiàn)出揮舞2階與擺振1階模態(tài)的特性。第1階在小總距時以揮舞特性為主,在大總距時以擺振特性為主,第2階在各個總距下?lián)]舞和擺振相當(dāng)。
5) 集合型第1階模態(tài)頻率隨總距升高緩慢降低;集合型第2階模態(tài)頻率隨總距的升高呈現(xiàn)先緩慢降低,在大總距時迅速降低后又升高的趨勢;扭轉(zhuǎn)1階與耦合2階的特性類似,頻率隨總距的升高呈現(xiàn)先緩慢降低,在大總距時迅速降低后又升高的趨勢。
1.6 旋翼頻率設(shè)計準(zhǔn)則
調(diào)頻設(shè)計是旋翼結(jié)構(gòu)動力學(xué)設(shè)計的主要目標(biāo)之一。傾轉(zhuǎn)旋翼結(jié)構(gòu)動力學(xué)特性與強結(jié)構(gòu)耦合(槳葉大結(jié)構(gòu)扭角、大變距范圍引起)和大范圍的旋翼轉(zhuǎn)速變化緊密聯(lián)系,這種強烈的耦合使得常規(guī)直升機旋翼的按照揮舞和擺振分開調(diào)頻的辦法不再適用,同時,這使得按照傳統(tǒng)設(shè)計要求的避開nΩ進行調(diào)頻設(shè)計將使得設(shè)計無法開展[8,9]。根據(jù)上述研究,提出了三槳葉萬向鉸旋翼初步設(shè)計時的結(jié)構(gòu)動力學(xué)設(shè)計準(zhǔn)則如下:
1) 根據(jù)槳葉邊界條件將旋翼模態(tài)分為周期型和集合型進行計算。鉸支邊界為周期型模態(tài),固支邊界為集合型模態(tài)。
2) 在直升機模式額定轉(zhuǎn)速、飛機模式額定轉(zhuǎn)速等工作停留轉(zhuǎn)速下,集合型模態(tài)固有頻率僅須避開1Ω、3Ω、6Ω;周期型模態(tài)除揮舞1階外,其它固有頻率僅須避開1Ω、2Ω、4Ω、5Ω。
3) 當(dāng)某個使用狀態(tài)中周期型1階模態(tài)以擺振特征為主時,模態(tài)頻率須大于1.25Ω。
4) 任何周期型模態(tài)頻率配置距2Ω和4Ω的氣動載荷激勵0.25Ω以上。
5) 任何集合型模態(tài)頻率配置距3Ω和6Ω氣動載荷激勵0.15Ω以上。
6) 對于6/rev及以上的高頻模態(tài)的頻率配置,要求較為放松,初步設(shè)計時不作特殊要求。
7) 在設(shè)計之初必須首先明確直升機模式和飛機模式的旋翼額定轉(zhuǎn)速和其它停留轉(zhuǎn)速;
8) 由于變距對動力學(xué)特性的影響十分突出,故在設(shè)計之初就要明確對應(yīng)轉(zhuǎn)速下需要穩(wěn)定使用的總距邊界。需要注意的是與直升機旋翼設(shè)計不同,保守過大的總距使用范圍是不可取的。
上述第3-6條所確定的設(shè)計邊界是工程設(shè)計初期的重要參考,但隨著設(shè)計工作的詳細(xì)深入,可通過載荷分析等手段逐步放寬要求。
此設(shè)計準(zhǔn)則最大的意義是擴展了傾轉(zhuǎn)旋翼的頻率配置可行區(qū)間,使得對總距十分敏感的傾轉(zhuǎn)旋翼固有頻率的調(diào)頻設(shè)計成為了可能,解決了由于傳統(tǒng)旋翼動力學(xué)設(shè)計準(zhǔn)則導(dǎo)致的使用限制。
2 工程設(shè)計案例
旋翼型式:萬向鉸
槳葉片數(shù):3
旋翼實度:0.144
槳葉結(jié)構(gòu)扭角:35°(非線性扭轉(zhuǎn))
變距活動范圍:0°~50°
飛機模式:35°~50°
直升機模式:0°~15°
萬向鉸揮舞活動范圍:-10°~ +10°
工況:各個設(shè)計總距下進行風(fēng)洞試驗
使用本文方法,結(jié)構(gòu)動力學(xué)設(shè)計結(jié)果見表2和表3。圖9為該縮比旋翼進行風(fēng)洞測試。
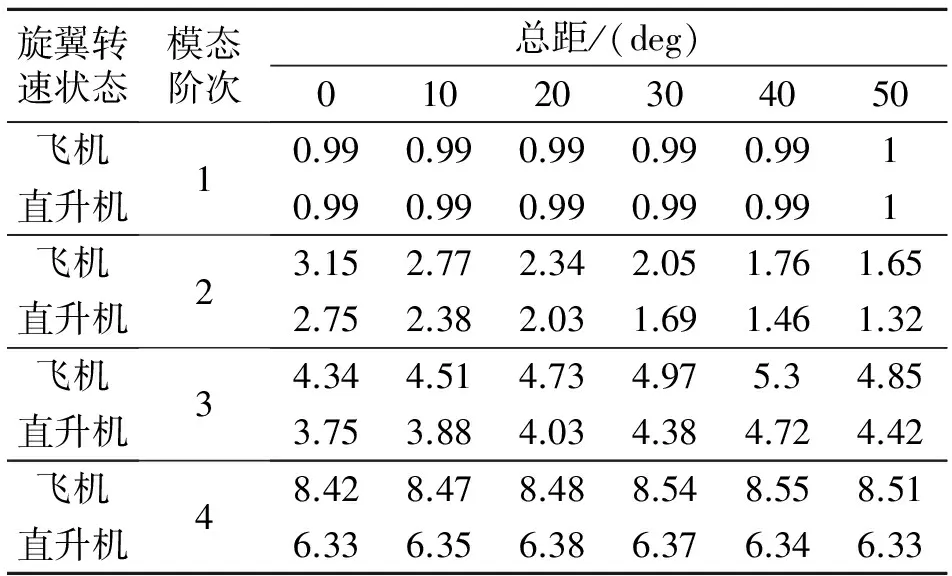
表2 周期型頻率比計算結(jié)果
表3 集合型頻率比計算結(jié)果
3 總結(jié)
本文緊密結(jié)合實際工程設(shè)計,研究總結(jié)了傾轉(zhuǎn)旋翼結(jié)構(gòu)動力學(xué)設(shè)計中所需考慮的重要問題,建立了傾轉(zhuǎn)旋翼動力學(xué)模型,研究總結(jié)了適用于工程實際的設(shè)計思路和設(shè)計準(zhǔn)則,這些研究揭示了傾轉(zhuǎn)旋翼的結(jié)構(gòu)動力學(xué)特點,涵蓋了傾轉(zhuǎn)旋翼結(jié)構(gòu)動力學(xué)工程設(shè)計的重要內(nèi)容和方法,基于此設(shè)計的縮比模型旋翼成功用于風(fēng)洞試驗,有力地支持了本文的研究結(jié)果。得出結(jié)論如下:
1) 本文建立的動力學(xué)模型適用于萬向鉸式傾轉(zhuǎn)旋翼結(jié)構(gòu)動力學(xué)計算分析;
2) 本文提出的邊界條件處理方法和模態(tài)特性研究對深入認(rèn)識萬向鉸式傾轉(zhuǎn)旋翼動力學(xué)特性有重要意義;
3) 本文提出的設(shè)計準(zhǔn)則可用于指導(dǎo)三葉萬向鉸式傾轉(zhuǎn)旋翼結(jié)構(gòu)動力學(xué)工程設(shè)計。
[1] 徐 敏. 傾轉(zhuǎn)旋翼機的發(fā)展與關(guān)鍵技術(shù)綜述[J]. 直升機技術(shù), 2003(2):40-44.
[2] 張曉谷. 直升機動力學(xué)設(shè)計[M]. 北京: 航空工業(yè)出版社, 1995: 4-45.
[3] Warwick G. Opposing Tilt [J]. Aviation Week & Space Technology, October 14/21, 2013:1-2.
[4] 王 偉, 段卓毅, 周 林. 傾轉(zhuǎn)旋翼機設(shè)計特點及難點淺析[J]. 航空科學(xué)與技術(shù), 2015(3):1-4.
[5] 張呈林, 張曉谷, 郭士龍, 等. 直升機部件設(shè)計[M]. 南京:南京航空學(xué)院, 2008.
[6] Srinivas V, Chopra I, Nixon W. Aeroelastic Analysis of advanced Geometry Tiltrotor Aircraft [J]. Journal of the American Helicopter Society, 2013,43(3):212-221.
[7] Srinivas V, Chopra I. Formulation of a Comprehensive Aeroelastic Analysis for Tiltrotor Aircraft [R]. AIAA-96-1546-CP.
[8] Popelka D A, Agnihotri A. Bell Helicopter Textron Inc. Prediction and Alleviation of V-22 Rotor Dynamic Loads [C]. American Helicopter Society, November 1989:55-79.
[9] Agnihotri A, Schuessler W, Marr R. V-22 Aerodynamic Loads Analysis and Dvelopment of Loads Alleviation Flight control System [C]. American Helicopter Society 4lth Annual Forum, Boston, Massachusetts, May 1989:32-53.
Research and Development of Tilt-rotor Structure Dynamic Design
YU Guorui, JIA Liangxian, HUANG Jun
(China Helicopter Research and Development Institute, Jingdezhen 333001, China)
Important and special structure dynamic problem had systemic researched in a project which used 3 advanced geometry blades on a scaled tilt-rotor design. The design criteria of tilt-rotor structure dynamic had been presented. The scale rotor which followed the criteria had work in wind tunnel test.
tilt-rotor; rotor dynamic;design.
2016-11-10
863計劃“先進直升機技術(shù)”(2012AA112201)。
喻國瑞(1989-),男,貴州貴陽人,本科,助理工程師,研究方向為旋翼系統(tǒng)動力學(xué)設(shè)計、復(fù)合材料旋翼槳葉結(jié)構(gòu)設(shè)計。
1673-1220(2017)01-001-07
V224;V214
A
猜你喜歡
哲學(xué)評論(2021年2期)2021-08-22 01:53:34
中華詩詞(2019年7期)2019-11-25 01:43:04
藝術(shù)啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
影視與戲劇評論(2016年0期)2016-11-23 05:26:01
湖北經(jīng)濟學(xué)院學(xué)報·人文社科版(2015年8期)2015-12-29 05:53:07
現(xiàn)代企業(yè)(2015年9期)2015-02-28 18:56:50
上海電機學(xué)院學(xué)報(2015年4期)2015-02-28 14:30:00
計算物理(2014年2期)2014-03-11 17:01:39