機載武器SINS/BDS組合導航自適應濾波算法研究
2017-04-10 15:30:49程海彬
航空兵器 2017年1期
程海彬

摘要: 對適用于機載武器的組合導航算法展開研究, 給出了SINS/BDS組合導航狀態方程, 推導了以偽距、 偽距率作為觀測量的觀測方程。 針對傳統卡爾曼濾波算法在測量噪聲不確定的情況下使用存在缺陷的問題, 研究了新的噪聲自適應調整濾波與殘差故障檢測算法。 對新算法進行了軟件設計, 并開展了軟件仿真與產品車載試驗。 試驗結果表明, 所設計的算法能有效增強系統魯棒性、 提高濾波算法精度, 有效隔離故障衛星數據, 能保證被測導航產品的高精度、 穩定、 可靠輸出。
關鍵詞: 組合導航; 自適應濾波; 故障檢測; 車載試驗
中圖分類號: TJ765; V249.32+8文獻標識碼: A文章編號: 1673-5048(2017)01-0028-05[SQ0]
0引言
武器系統對機載武器作戰能力的要求越來越高, 如要求具備打擊300 km以外目標的能力等, 在這樣的射程下, 機載武器已不能單純依靠慣性導航, 需要引入組合導航系統。 隨著國內自主北斗衛星導航
系統(BDS)開始提供區域定位服務, 在武器系統中采用SINS/BDS組合導航系統來提高武器導航精度, 以達到武器系統的要求, 已成為一種必然選擇。
1慣導誤差方程
3狀態方程
選擇11維的狀態變量, 包括三個速度誤差、 三個失準角、 三個位置誤差、 接收機鐘差、 鐘漂。
狀態變量:
X(t)=[dVxdVydVzψxψyψzdRxdRydRzdtrdtv]T(6)
狀態方程為
X·(t)=F(t)X(t)+G(t)W(t)(7)
4觀測方程
觀測方程的推導過程在CGCS2000坐標系下進行。
4.1偽距觀測方程
航空兵器2017年第1期
程海彬, 等: 機載武器SINS/BDS組合導航自適應濾波算法研究
假定xeIyeIzeI為經過換算的慣導在CGCS2000中的輸出; xeByeBzeB為BDS在CGCS2000坐標系下的位置輸出; xisy
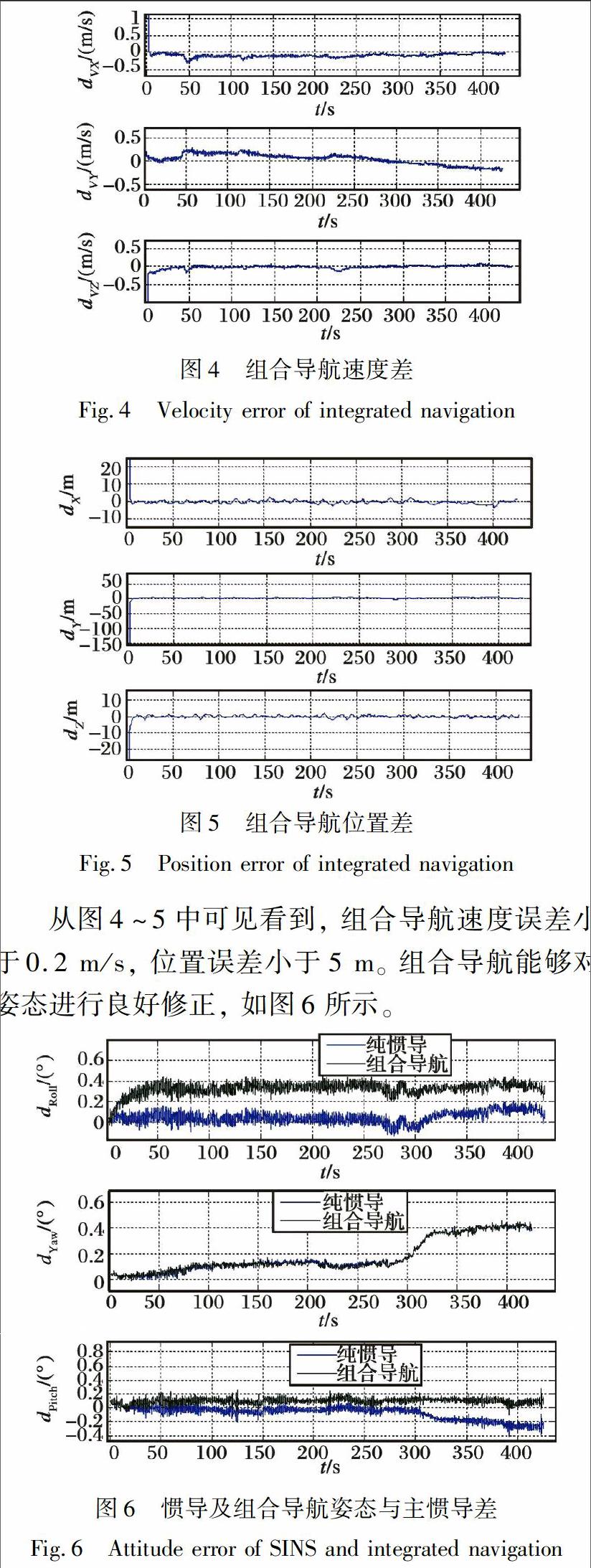
(1) 滾動角對準殘差得到有效估計, 漂移得到有效抑制, 姿態誤差保持在0.2°以內;
(2) 由于車輛動態差, 航向誤差無法得到有效估計, 組合導航保持了純慣性輸出結果;
(3) 組合導航結果有效地鉗制了俯仰角姿態漂移, 偏差維持在0.1°附近。
通過半實物仿真可見組合導航算法工作狀態良好, 組合導航結果維持了高精度、 穩定輸出。
7結論
對SINS/BDS組合導航算法進行了詳細推導。 在濾波算法上, 設計了一套系統噪聲與觀測噪聲在線實時調整的自適應濾波算法, 使得算法精度得到進一步提高。 采用了殘差χ2的故障檢測技術, 有效提高了組合導航系統可靠性。 對所設計的算法進行了軟件仿真與全狀態的車載試驗驗證, 從試驗結果可以看出所設計的算法可行, 工作可靠, 已具備工程應用條件。
參考文獻:
[1] 秦永元, 張洪鉞, 汪叔華. 卡爾曼濾波與組合導航原理[M]. 西安: 西北工業大學出版社, 2012.
Qin Yongyuan, Zhang Hongyue, Wang Shuhua. Theory of Kalman Filter and Integrated Navigation[M]. Xian: Northwestern Polytechnical University Press, 2012.(in Chinese)
[2]
解春明, 趙剡. 高精度傳遞對準仿真用飛行軌跡設計[J]. 火力與指揮控制, 2010, 35(9): 88-92.
Xie Chunming, Zhao Yan. HighPrecision Flight Track Design for Transfer Alignment Simulation[J]. Fire Control & Command Control, 2010, 35(9):88-92.(in Chinese)
[3] 周衛東, 蔡佳楠, 孫龍. GPS/SINS超緊組合導航系統自適應混合濾波算法[J]. 哈爾濱工業大學學報, 2014, 46(7): 47-52.
Zhou Weidong, Cai Jianan, Sun Long. An Adaptive Revising Filtering Method for GPS/SINS UltraTightly Coupled System[J]. Journal of Harbin Institute of Technology, 2014, 46(7): 47-52. (in Chinese)
[4] 張利民, 張興會, 陳增強, 等. 自適應Kalman濾波的改進及其在SINS/GPS組合導航中的應用[J]. 東南大學學報:自然科學版, 2013, 43(S1): 89-92.
Zhang Limin, Zhang Xinghui, Chen Zengqiang, et al. Improvement of Adaptive Kalman Filtering Algorithm and Its Application in SINS/GPS Integrated Navigation[J]. Journal of Southeast University: Natural Science Edition, 2013, 43(S1): 89-92. (in Chinese)
[5] 張科, 劉海鵬, 李恒年, 等. SINS/GPS/CNS組合導航聯邦濾波算法[J]. 中國慣性技術學報, 2013, 21(2): 226-230.
Zhang Ke, Liu Haipeng, Li Hengnian,et al. SINS/GPS/CNS Integrated Navigation Federal Filtering Algorithm[J]. Journal of Chinese Inertial Technology, 2013, 21(2): 226-230. (in Chinese)
[6] 孫兆妍, 王新龍, 車歡. GPS/SINS深組合導航技術綜述[J]. 航空兵器, 2014(6): 14-19.
Sun Zhaoyan, Wang Xinlong, Che Huan. Review on Navigation Techniques of Deep GPS/SINS Integration[J]. Aero Weaponry, 2014(6): 14-19. (in Chinese)
[7] 王新龍, 謝佳, 王君帥. SINS/GPS不同組合模式適應性分析與驗證[J]. 航空兵器, 2013(3): 3-8.
Wang Xinlong, Xie Jia, Wang Junshuai. Adaptability Analysis and Validation of Different SINS/GPS Coupled Modes[J]. Aero Weaponry, 2013(3): 3-8. (in Chinese)
[8] 羅萍, 袁莉杰, 黃良學, 等. 基于北斗衛星組合導航精度優化設計研究[J]. 計算機仿真, 2015, 32(11): 75-78.
Luo Ping, Yuan Lijie, Huang Liangxue, et al. Design of Accuracy Optimization Based on COMPASS Integrated Navigation System[J]. Computer Simulation, 2015, 32(11): 75-78. (in Chinese)
[9] 袁美桂, 嚴玉國, 龐春雷, 等. 改進的自適應Kalman濾波在GPS/SINS中的應用[J]. 空軍工程大學學報: 自然科學版, 2015, 16(5): 65-69.
Yuan Meigui, Yan Yuguo, Pang Chunlei, et al. The Application of Improved Adaptive Kalman Filter to GPS/SINS[J]. Journal of Air Force Engineering University: Natural Science Edition, 2015, 16(5): 65-69. (in Chinese)
[10] 張秋昭, 張書畢, 劉志平, 等. 基于雙差偽距/偽距率的GPS/SINS緊組合導航[J]. 武漢大學學報(信息科學版), 2015, 40(12): 1690-1694 .
Zhang Qiuzhao, Zhang Shubi, Liu Zhiping, et al. TightlyCoupled GPS/SINS Integrated System Measurement Model Based on DoubleDifference PseudoRange/PseudoRange Rate[J]. Geomatics and Information Science of Wuhan University, 2015, 40(12): 1690-1694. (in Chinese)
[11] 李金梁, 車萬方, 李明忠. 一種容錯組合導航濾波器設計與仿真[J]. 指揮控制與仿真, 2015, 37(5): 93-98.
Li Jinliang, Che Wanfang, Li Mingzhong. Design and Simulation of Fault Tolerant Integrated Navigation Filter[J]. Command Control & Simulation, 2015, 37(5): 93-98. (in Chinese)