運動模糊圖像復原技術研究
2017-04-10 02:44:36張玉葉李明珠王春歆李開端
中國設備工程 2017年6期
張玉葉,李明珠,王春歆,李開端
(1.海軍航空工程學院青島校區,山東 青島 266041;2.北海艦隊,山東 青島 266001)
運動模糊圖像復原技術研究
張玉葉1,李明珠1,王春歆2,李開端1
(1.海軍航空工程學院青島校區,山東 青島 266041;2.北海艦隊,山東 青島 266001)
分析運動模糊圖像復原研究現狀,說明該研究目前的三個方面的應用局限性,然后針對這些局限介紹目前研究的方向及常見技術。為了突破單一圖像進行運動模糊復原的局限性,解決點擴散函數(PSF)難以估計以及圖像反卷積的病態性問題,介紹一種聯合圖像復原的方法。
運動模糊;圖像復原;點擴散函數;反卷積
運動模糊圖像是由于攝像機與運動物體在曝光時間內有相對運動而產生的模糊,圖像中每一點灰度是在運動參數所確定的距離當中,各景物點灰度的線性迭加。運動模糊圖像恢復恢復討論的是對運動物體拍攝的模糊圖像進行精確的恢復。圖像運動模糊復原在軍事和工業控制有重要的應用需求,所以發展了很多的恢復方法,諸如差分恢復、維納濾波、空間自適應復原方法等。這些方法各有特點,一定程度上解決了運動模糊圖像的判讀問題,但是在應用上有一定的限制。
(1)運動模糊圖像的退化過程本身,及反卷積復原過程存在真實目標信息的丟失。
(2)模糊圖像復原問題的研究一直以來基于空間移不變的假設,圍繞著反卷積理論及技術使用各種圖像復原算法進行恢復處理,而實際上,圖像在獲取過程中受拍攝條件及光學成像系統影響,降質函數容易隨空間變化而變化。
(3)運動模糊復原方法,始終圍繞著建立反卷積數學模型找回或者擬合逼近這些丟失信息進行。但是因為反卷積的病態性,復原過程容易受 PSF 估計誤差及噪聲影響,引入虛假信息,所以該問題的研究遇到瓶頸。
下面分別針對以上三個主要限制進行分析,并介紹目前研究的突破方向及成果。
1 運動模糊圖像信息丟失原因分析
(1)由物理成像條件造成信息損失。首先從像素運動角度說明圖像的模糊過程,設運動模糊長度為L,運動模糊方向為θ。相機與目標存在相對運動時,目標圖像每個像素的運動性質是相同的,每個像素的灰度值是由其運動方向上的前L個像素灰度值的加權疊加。因為像素在途經每個位置時的曝光時間相等,所以其加權值為 L/1 。設 5=L , °=0θ ,示意圖如圖1。

圖1 運動模糊圖像的模糊機理示意圖
圖1中,矩陣 f表示目標的真實圖像,矩陣 g表示運動模糊圖像。該圖表示真實圖像的像素 ),(jif
經過了水平向右模糊5個像素得到了模糊圖像的像素 ),(jig ,表達式如下:

由上式可知,模糊圖像的每個像素是原始圖像中相鄰像素的平均結果,所以在復原模糊圖像時,每個像素都得需要其相鄰像素的信息才能得以復原。所以圖像的空間限制造成的邊界非零信息丟失會影響圖像不能完全復原。邊界非零信息的丟失程度取決于運動模糊長度L,L越大,丟失的信息越多,復原效果越差。
(2)由復原過程產生的復原效應。無論是代數復原方法還是頻域復原方法,在處理圖像時不可避免地引入各種誤差或者低通濾波效應,尤其當運動模糊長度不是整數,或者模糊方向不是水平或垂直時,由于單像素的不可分性,勢必引入更多的誤差。
2 空間移變運動模糊的復原方法
對空間移變降質,出現了一些有針對性的方法,如針對場曲等高斯型模糊的多項式擬合方法、針對旋轉運動模糊的復原方法、坐標變換法、矩陣分解法、卡爾曼濾波復原圖像分塊法等方法。這些方法的思想或者將降質函數轉化為隨空間變化的形式,或者將圖像轉化為局部空間移不變降質,對于其相應的特定情況處理是有效的,但是目前還沒有合適的方法來解決一些常見的運動拍攝條件出現的空間移變的運動模糊。
3 引入計算攝影技術解決反卷積的病態問題
運動模糊反卷積復原的病態性一直是圖像處理領域中公認的難題,也極大地限制了復原問題研究的進展。近年來研究者們將計算攝影技術引入到運動模糊復原領域,開拓了一種全新的思路。
基于計算攝影技術的圖像復原是通過設計新的圖像獲取方式,來獲得更利于圖像復原的信息。2004 年,Ben-Ezra 等 人 首次 提 出借 助 高 速視 頻傳感器來輔助估計運動模糊 PSF,發展了一類基于視覺測量技術的方法,該類方法對成像設備的配置及組合要求較高。到 2006 年,Raskar等人提出在相機曝光時間內快速開—關快門的編碼曝光(CodedExposureCE),可以獲取可逆的運動模糊點擴散函數(PSF),也就是PSF在頻域無零點存在,從而將病態性的復原問題轉化為良態。CE方法獲取可逆 PSF 的思想引起了研究者廣泛的關注,也得到了進一步的發展。但是 CE方法需要復雜的快門控制設置,對于局部圖像復原的前提假設是均勻背景,并且需要手動進行 PSF 估計和目標分割。2009 年,Agrawal等人利用普通相機通過連續拍攝,并改變曝光時間來記錄同一目標,得到多個具有不同 PSF 的運動模糊目標圖像,從而引入零填充的概念來構建可逆的 PSF,進行多圖像聯合復原。該方法成像設備要求簡單,克服了前面方法中復雜的硬件設計問題。但是該方法需要在連續拍攝運動目標的過程中,不斷變換曝光時間。對于高速運動目標,相鄰幀中目標圖像形態變化會比較大。另外,不同曝光時間獲取的圖像亮度也不同,那么利用多幅 PSF 不同的同一目標圖像進行復原時,容易產生較大誤差。
下面借鑒 Agrawal提出的聯合多個 PSF 構建可逆的 PSF 的思想,介紹一種多圖像聯合模糊復原方法,利用設備參數相同的多個視頻獲取裝置,來獲取在同一背景下,亮度相同、但運動模糊程度不同的目標影像,進而對空間域迭代復原算式進行聯立求解。
4 一種多圖像聯合模糊復原方法
4.1 設置不同快門的視頻記錄設備組合
采用固定對同一視場進行拍攝的多臺視頻設備來捕捉運動目標。這些視頻設備型號相同,多臺設備靠緊固定,在拍攝距離較遠的條件下,不同設備拍攝的同一目標位置影像差別極微小。這樣,當運動目標經過指定視場時,視頻設備可以得到同一靜止背景下不同運動模糊程度的運動目標影像。
設置相同的幀頻,不同的曝光時間iT(快門),相應地調整光圈系數iF,來保證不同設備獲取的照片具有相同的曝光量H。這里 H = Ti·Ei,其中 Ei指Fi對應的光照度。注意:同可變曝光連續圖像獲取方式相同,目標影像在背景中的位置也是有差別的,因為視頻設備幀頻相同,但是所設的曝光時間不同,所以快門開啟的時間不同,記錄的目標起始位置有一定的位移。圖2顯示的是兩臺視頻設備采用不同快門和光圈組合拍攝同一運動目標得到的觀測圖像2(b)和 2(c)及其對應的背景圖像 2(a)。
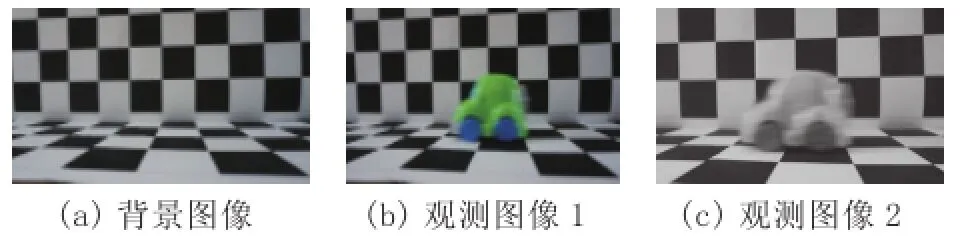
圖2 采用不同曝光時間獲取的運動目標圖像
4.2 運動模糊目標圖像 PSF 估計及分割提取
(1)運動模糊 PSF 估計。不同曝光時間獲取的圖像,運動模糊程度也不同,需要分別估計出每幅圖像的運動模糊 PSF。傳統的僅對單幅模糊圖像進行的 PSF 估計準確度是比較低的,多幅圖像共同復原的方法更利于準確估計 PSF。用本方法獲取的每幅包含目標的圖像,其獲取時間由相機系統時間設置可以直接得到,然后根據兩幅圖像目標在背景中位置的差異,容易計算得到目標圖像的運動速度v(單位:像素 /秒),v與曝光時間的乘積就是目標圖像的運動模糊長度d(單位:像素),也就得到了第k幅圖像中的運動模糊點擴散函數kh。
(2)運動模糊目標圖像的分割提取。對于靜止背景中運動目標的復原,首要的一點就是對完整目標圖像的分割提取。本方法根據運動模糊疊加特征進行目標圖像的分割提取,得到第k幅運動目標模糊圖像kg。
4.3 多幅圖像聯合復原求解
得到kh和kg,就可以利用空間域方法進行聯合復原。
單幅圖像的空間域復原求解算式如下:

這里, f、kn分別表示復原結果圖像和模糊圖像中的加性噪聲。kB是kh的循環運動模糊矩陣。式(2)轉化為線性方程:

其中 A= BTB& b = BTg,利用共軛梯度算法在
kkk
空域求解。
對k幅圖像聯合求解,則:
相應地,式(3)轉化為求解如下系統:
TP391.41
A
1671-0711(2017)03(下)-0182-03
猜你喜歡
中國特種設備安全(2022年6期)2022-09-20 02:52:28
石家莊鐵路職業技術學院學報(2019年3期)2019-10-30 03:26:32
電子制作(2018年11期)2018-08-04 03:26:08
工業設計(2016年12期)2016-04-16 02:52:00
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
航天返回與遙感(2014年4期)2014-07-31 17:47:47
消費者報道(2014年7期)2014-07-31 11:23:57
長江大學學報(自科版)(2014年7期)2014-03-20 13:21:02
