一種海水采樣對接傳輸裝置的設(shè)計
2017-04-10 02:54:12楊超郭偉其金左文楊毅李小毛劉明確彭艷
上海大學(xué)學(xué)報(自然科學(xué)版) 2017年1期
楊超,郭偉其,金左文,楊毅,李小毛,劉明確,彭艷
(1.中國船舶工業(yè)系統(tǒng)工程研究院,北京 100036;2.國家海洋局東海海洋環(huán)境調(diào)查勘察中心,上海 200137; 3.國家海洋局東海分局,上海 200137;4.上海大學(xué)機電工程與自動化學(xué)院,上海 200072)
一種海水采樣對接傳輸裝置的設(shè)計
楊超1,郭偉其2,金左文3,楊毅4,李小毛4,劉明確4,彭艷4
(1.中國船舶工業(yè)系統(tǒng)工程研究院,北京 100036;2.國家海洋局東海海洋環(huán)境調(diào)查勘察中心,上海 200137; 3.國家海洋局東海分局,上海 200137;4.上海大學(xué)機電工程與自動化學(xué)院,上海 200072)
為解決采樣海水從吊放式采水器到儲存分配系統(tǒng)對接傳輸問題,根據(jù)海水取樣要求,提出了一套海水從采水器到分配儲存系統(tǒng)的對接傳輸裝置設(shè)計方案.對接傳輸裝置由上定對接頭和下對接座組成,其中上定對接頭的導(dǎo)向爪組與下對接座的錐鋼套采用桿錐方式的粗對接,以補償上定對接頭滑套中心底錐孔與下對接座導(dǎo)向錐管的二次精對接定位誤差,降低其定位精度要求.這樣,從機械結(jié)構(gòu)上保證了采水器到分配儲存系統(tǒng)的海水偏心流道的O形密封圈裝配要求.為了消除對接過程中各種變差對系統(tǒng)的影響,該裝置采用了彈簧阻尼減震,再配以波紋管柔性連接補償軸向位移及徑向偏心,目的是為延長裝置壽命.基于SolidWorks Motion仿真還原了整個對接系統(tǒng)定心過程,揭示了裝置中各種變差對系統(tǒng)的影響.再基于SolidWorks Simulation仿真了導(dǎo)向爪組在對接過程中的受力狀態(tài),驗證了整個裝置結(jié)構(gòu)設(shè)計的合理性.
海水采樣;自動釋放對接;O形密封;彈簧阻尼減震;波紋管補償
隨著海洋環(huán)境對人類生活影響的認(rèn)識不斷加深,海洋環(huán)境監(jiān)測問題日益受到人們的重視,而作為海洋環(huán)境監(jiān)測的一種手段,海水分層采樣技術(shù)逐漸進(jìn)入人們的視線.目前,國外學(xué)者在海水監(jiān)測領(lǐng)域廣泛運用了在線監(jiān)測、集成化、智能化和網(wǎng)絡(luò)化等技術(shù).而我國作為發(fā)展中國家,海水環(huán)境監(jiān)測技術(shù)手段還比較落后,自動化程度較低,現(xiàn)今廣泛采用的方式還是實驗技術(shù)員集體隨大船出海,利用美國General Oceanics公司和意大利Idronaut公司研制的多通道水樣采集器[1]采樣并經(jīng)人工加藥冷藏保存后帶回實驗室檢測.在海水監(jiān)測點-線-面的發(fā)展趨勢下,基于智能無人水面艇(unmanned surface vehicle,USV)移動平臺的分層海水采樣及分配儲存技術(shù)的出現(xiàn)將改變我國海洋環(huán)境監(jiān)測方面的點-線監(jiān)測現(xiàn)狀.該采水平臺可以在高污染及高輻射等危險環(huán)境下,每天程序化地實現(xiàn)多個站點的分層海水采樣并保存.海水采樣裝置主要包括吊放式采水器、自動海水對接傳輸裝置、儲存冷卻系統(tǒng)、智能卷揚機、過濾系統(tǒng)等,其中自動海水對接傳輸裝置主要完成海水從采水器到儲存冷卻系統(tǒng)的傳輸過程.由于受海洋作業(yè)條件、結(jié)構(gòu)等方面的制約,傳統(tǒng)對接機構(gòu)已經(jīng)不能滿足需要,而國內(nèi)相關(guān)的研究較少,故自動海水對接傳輸裝置的研制具有重要的應(yīng)用價值,將對海水化學(xué)分析意義重大.
自動海水對接傳輸裝置由上定對接頭和下對接座組成.下對接座底部中心引出的鋼絲繩穿過上定對接頭中心孔提升對接.在可靠對接時,會形成一條特殊的流道,該流道是由下對接座的法蘭軸帶環(huán)形槽的外軸面與上定對接頭的特氟龍襯套內(nèi)孔面通過上下O形密封圈形成的密閉偏心流道,海水通過該流道完成傳輸.根據(jù)實際作業(yè)情況,本工作提出粗對接[2-3]加二次精對接[4-5]的O形密封圈裝配[6-7]手段以達(dá)成要求.為了消除對接過程中各種變差對系統(tǒng)的影響,本裝置采用了彈簧阻尼減震,再配以波紋管柔性連接補償軸向位移及徑向偏心[8-9],目的在于延長裝置壽命.并輔以SolidWorks Motion仿真模擬整個裝置的對接定心裝配過程,再利用SolidWorks Simulation對關(guān)鍵零部件導(dǎo)向爪的強度進(jìn)行精確設(shè)計[10],以驗證整個對接裝置結(jié)構(gòu)設(shè)計的合理性.
1 海水采樣對接傳輸裝置方案設(shè)計
1.1 對接傳輸裝置總體方案設(shè)計
智能無人水面艇海水采樣是在充分利用成熟的無人艇平臺基礎(chǔ)上,搭載吊放式采水器、采水器抱持裝置、甲板采水支架、對接傳輸裝置、智能水分配儲存系統(tǒng)等(見圖1).對接傳輸裝置要完成的任務(wù)是將采水器分層采樣的海水轉(zhuǎn)接輸送到水分配儲存系統(tǒng).由于采集的海水被用于化學(xué)分析,這就決定了該對接傳輸裝置要完成的是一項十分復(fù)雜的作業(yè)過程.采用下對接座中心的鋼絲繩穿過上定對接頭中心孔提升對接,在上定對接頭與下對接座可靠對接時,一條特殊的由抗腐蝕塑料材質(zhì)構(gòu)成的偏心密封流道將形成,該流道由下對接座的法蘭軸帶環(huán)形槽的外軸面與上定對接頭的特氟龍襯套內(nèi)孔面通過上下O形圈形成密閉的流道,海水通過流道完成分配,流道兩端主要利用了O形圈的擠壓作用完成密封.而O形圈的對接裝配需要極高的軸心對中精度,為保證該中心對中精度,在上定對接頭外周均布設(shè)4只壓緊的導(dǎo)向爪,與下對接座的錐鋼套碰觸形成桿錐方式的粗對接.再輔以下對接座的導(dǎo)向錐管與上定對接頭滑套底錐面孔連接形成二次精對接,達(dá)到O形圈的裝配要求.
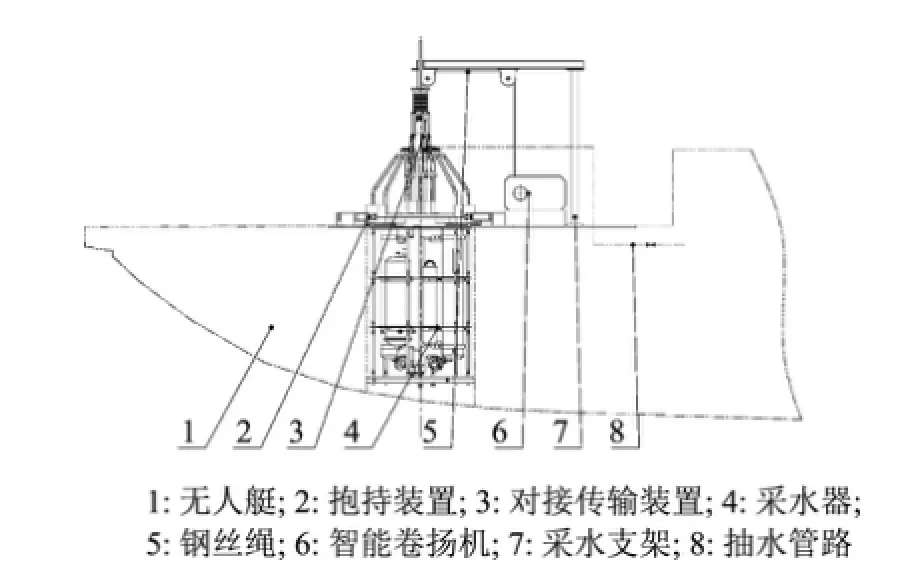
圖1 智能無人水面艇海水采樣設(shè)計圖Fig.1 Design of seawater sampling for intelligent USV
根據(jù)海水采樣及其他行業(yè)規(guī)范整理出的對接傳輸裝置的設(shè)計還應(yīng)滿足如下原則:
(1)分層海水必須通過密封的塑料管路進(jìn)行傳送,避免金屬的污染影響海水分析;
(2)必須經(jīng)得住海水腐蝕,并且具有較高的強度和更長的使用壽命;
(3)進(jìn)水口與出水口流道必須具有自密封功能,防止海水及空氣污染;
(4)采用鋼絲繩吊放,必須具有對接緩沖裝置來保證使用壽命;
(5)下對接座隨采水器上升,排除下對接座方位不確定的因素.
根據(jù)這些設(shè)計原則,對接裝置的零件接觸部分全部采用316L材質(zhì),彈簧阻尼減震,流道部分采用特氟龍材質(zhì).另外采用柔性波紋管緩解對接沖擊,采用流道口自密封結(jié)構(gòu)設(shè)計,對接方位自適應(yīng)設(shè)計.
1.2 海水采樣對接傳輸裝置結(jié)構(gòu)設(shè)計
圖2為上定對接頭與下對接座分開狀態(tài)及對接狀態(tài)圖,圖中固定在下對接座的鋼絲繩穿過上定對接頭中心孔向上提升.海水采樣對接傳輸可分為3個對接過程,分別為分離態(tài)、粗對接態(tài)和精對接態(tài).分離態(tài)是指上定對接頭與下對接座通過放松鋼絲繩分離,下對接座隨采水器下到海底分層取水的狀態(tài),在該狀態(tài)下流道的進(jìn)出口有自密封作用;粗對接態(tài)是指被壓緊的導(dǎo)向爪與下對接座的錐鋼套碰觸定心過程,借助彈簧阻尼減震及波紋管補償消除對接過程中采水器受到外界的搖擺和振動等各種干擾;精對接態(tài)是指粗對接狀態(tài)后,下對接座中心被限制在一個較小的范圍內(nèi),通過滑套底孔與導(dǎo)向錐管對接引導(dǎo)到滑套直孔與導(dǎo)向錐管直軸端的公差精配合,保證上定對接頭與下對接座中心形成一條精準(zhǔn)的直線的過程,該過程能滿足O形圈的安裝精度要求.圖3為對接傳輸裝置粗對接細(xì)節(jié)圖,圖4為對接傳輸裝置精對接狀態(tài)圖,圖5為對接狀態(tài)形成后的偏心流道細(xì)部圖.
粗對接機構(gòu)由圍繞上定對接頭的4個導(dǎo)向爪、4個轉(zhuǎn)軸、4個壓簧、4個壓簧芯軸及4套鎖緊螺母組成上對接桿系.對接時上對接桿系接觸下對接座的錐鋼套,上對接桿系的4個壓緊的導(dǎo)向爪緊緊地抱緊下對接座的錐鋼套四周,利用彈簧阻尼減震完成上定對接頭與下對接座在復(fù)雜狀態(tài)下的對中任務(wù).上定對接頭通過波紋管與甲板支架連接,波紋管的補償可以起到糾偏定心及對接緩沖的作用(見圖3).粗對接引導(dǎo)后面的精對接動作,精對接上定對接頭中的滑套中心底錐與下對接座中心的導(dǎo)向錐管先導(dǎo)向?qū)?再過渡到滑套中心孔直段與導(dǎo)向錐管直段的公差配合對接.這時下法蘭軸帶4個O形圈可以順利地裝進(jìn)特氟龍襯套內(nèi)孔中,到位后位置傳感器動作,采水器被抱持機構(gòu)定位,密封流道回路形成,這時可以進(jìn)行海水的對接傳輸(見圖4).海水對接傳輸完成后鋼絲繩放松,裝置按照上述對接過程反向分離后可進(jìn)行下一輪海水采集對接傳輸.
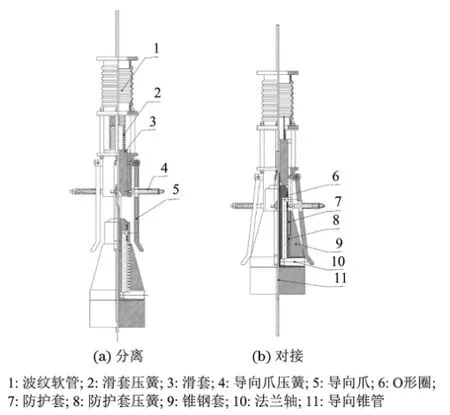
圖2 對接傳輸裝置分離狀態(tài)及對接狀態(tài)Fig.2 Docking device separation state and docking state
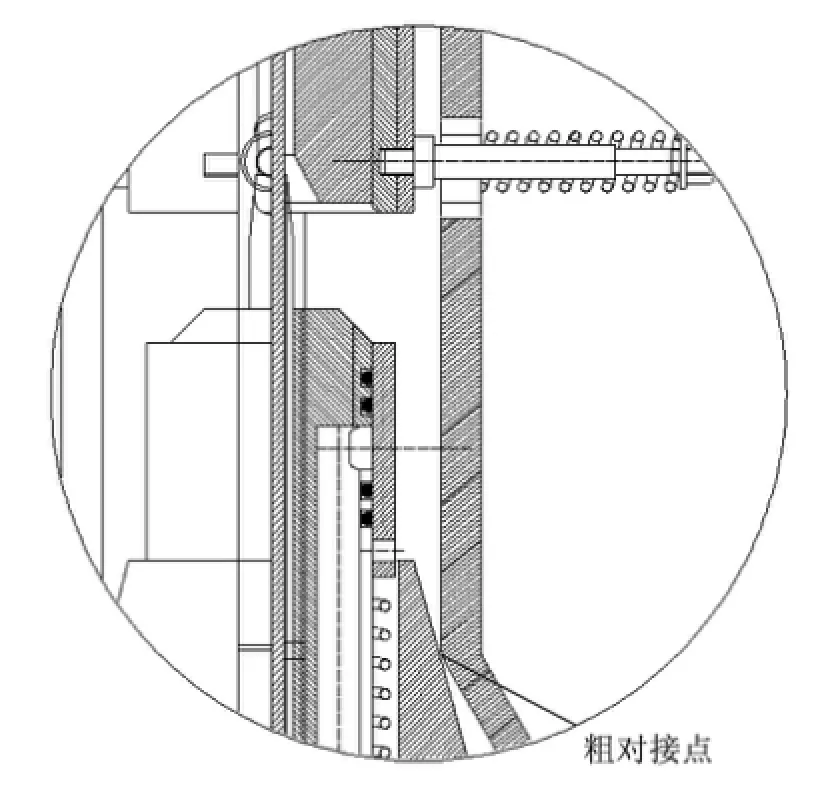
圖3 對接傳輸裝置粗對接細(xì)節(jié)圖Fig.3 Primary docking status detail view
圖4 對接傳輸裝置精對接狀態(tài)圖Fig.4 Fine docking status detail view
圖5 對接工作狀態(tài)細(xì)部圖Fig.5 Docking status detail view in working position
2 粗精對接機構(gòu)的設(shè)計
2.1 對接機構(gòu)導(dǎo)向爪壓簧規(guī)格的選取
本裝置采用6件壓簧,壓簧的正確設(shè)計對本裝置起重要作用.6件壓簧材質(zhì)采用316L是為應(yīng)對潮濕的海水工作環(huán)境.在6件壓簧中,4件壓緊導(dǎo)向爪用以完成上定對接頭與下對接座的中心粗對接.粗對接的重要性在于要負(fù)責(zé)調(diào)整下對接座隨采水器上升時的各種晃動及搖擺糾偏對中,如果壓簧剛度太小(即糾偏作用力小),則不能起到調(diào)整中心的作用;如果作用力太大,而對接作用力也加大,則對裝置的磨損及壽命影響很大,因此正確設(shè)計這4件壓簧十分重要.滑套壓簧的作用是在常態(tài)下使滑套處于最下位置,起出流道口的自密封作用[11],達(dá)到頂開時襯套內(nèi)孔面較清潔的目的;同理,保護(hù)套壓簧的作用是使保護(hù)套處于最上位置,起密封出流道口的作用,達(dá)到頂開時法蘭軸上外軸面較清潔的目的.
由于滑套壓簧及保護(hù)套壓簧的作用是自密封及回位清潔表面,對整個對接裝置起輔助作用,故選擇較小作用力即可滿足要求.根據(jù)壓簧標(biāo)準(zhǔn)設(shè)計選型的幾何尺寸如表1所示.
表1 滑套壓簧及防護(hù)套壓簧選用尺寸Table 1 Springs parameters used in slide sleeve and protective sleeve
由于導(dǎo)向爪壓簧對整個對接裝置完成對中十分重要,故對導(dǎo)向爪壓簧進(jìn)行4組參數(shù)對比,這4組參數(shù)都必須滿足整個裝置的安裝要求.由于采水器下對接座被限制在無人艇中孔范圍內(nèi)[12](經(jīng)計算其擺動角度小于等于3°,當(dāng)鋼絲繩提升速度為0.1 m/s、采水器及對接座質(zhì)量為130 kg時),為此限定對接座偏擺在3°時對4組壓簧按表2選型進(jìn)行仿真,得到4組導(dǎo)向爪與錐鋼套的受力圖(見圖6),此處的壓簧K系數(shù)及受力大小由壓簧K常數(shù)計算方法(見2.3節(jié))得到.
表2 導(dǎo)向爪壓簧選型測試參數(shù)Table 1 Test parameters of guide claws pressure springs selection
由受力圖6可知,導(dǎo)向爪1和3與錐鋼套在1.38 s接觸,接觸后接觸力平穩(wěn)增加;而導(dǎo)向爪2與錐鋼套接觸后又脫離,與導(dǎo)向爪4在接觸后進(jìn)行衰減振蕩后定心.導(dǎo)向爪2在初始狀態(tài)受力較大,完成最終定心后,4只導(dǎo)向爪受力基本相同.
通過SolidWorks Motion仿真測得在對接座中心線偏角為3°時,于法蘭套底300 mm處鋼絲繩提升速度定為0.1 m/s,采水器及對接座質(zhì)量為130 kg.下對接座鋼錐套中心點x軸偏移量及y軸偏移量如圖7所示.
分析仿真圖7可以看到,錐鋼套在x軸向中心點偏移量較小(這與設(shè)定的仿真偏轉(zhuǎn)方位有關(guān)),錐鋼套在y軸偏移量較大,最大偏移量為11 mm.另外,圖7還顯示在對接座中心偏移3°時,對接座都能很好地進(jìn)行對接.對中效果發(fā)生在1.9 s后基本維持中心點不變,驗證了壓簧選型的正確性.
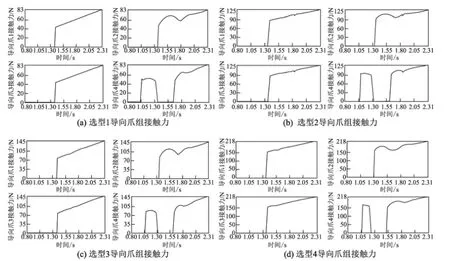
圖6 4種選型下導(dǎo)向爪接觸力對比Fig.6 Comparisons of contact force between 4 types of guiding claw
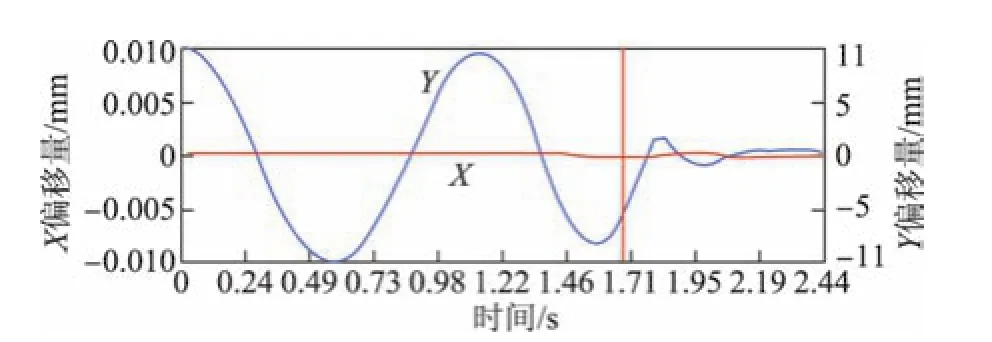
圖7 對接座錐鋼套在對接過程中的中心點X,Y偏移量Fig.7 X,Y ofset of center point of cone steel sleeve during docking
2.2 對接機構(gòu)導(dǎo)向爪壓簧的受力分析
為了了解在對接過程中導(dǎo)向爪壓簧的受力情況,本工作選擇選型4中受影響最大的導(dǎo)向爪2進(jìn)行壓簧壓縮長度仿真數(shù)據(jù)測量.圖8為對接影響最大的導(dǎo)向爪2的壓簧壓縮曲線圖.
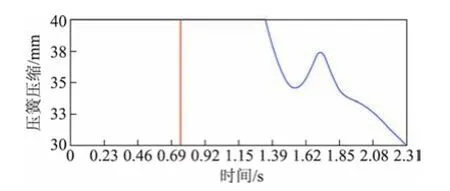
圖8 對接過程中的導(dǎo)向爪2壓簧壓縮長度變化Fig.8 Compression spring length change chart of docking process guide claw 2
從圖8中可以看出,壓簧初始壓縮長度為20 mm,導(dǎo)向爪在1.28 s時開始接觸錐鋼套后,壓簧按非線性壓縮,到2.35 s后,導(dǎo)向爪伸展到最大,此時壓簧壓縮長度為29 mm.
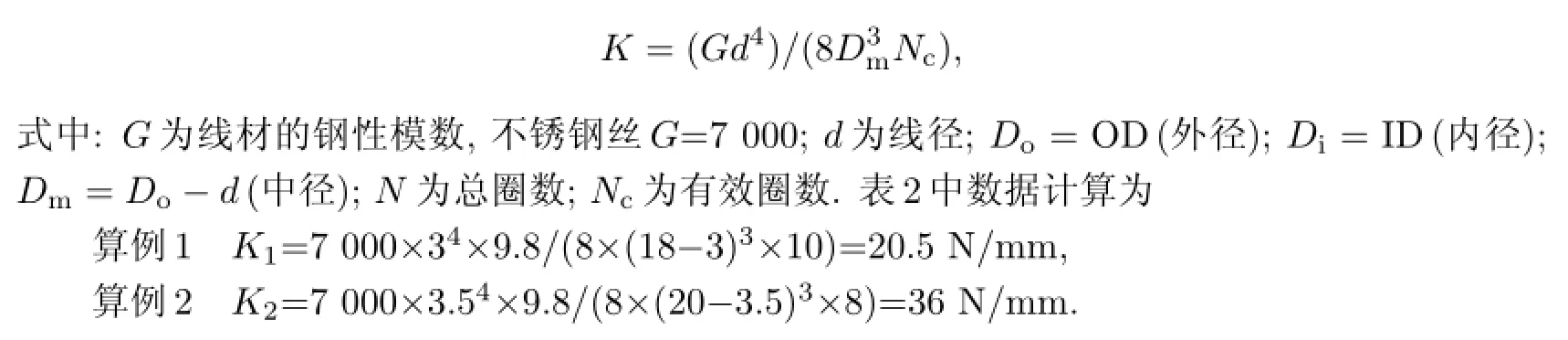
2.3 對接機構(gòu)彈簧的K常數(shù)計算
壓簧K系數(shù)的受力計算(當(dāng)彈簧被壓縮時,每增加1 mm距離的負(fù)荷(N/mm))公式如下,
3 粗精對接機構(gòu)的強度設(shè)計
3.1 對接機構(gòu)導(dǎo)向爪受力分析
由于采樣對接裝置導(dǎo)向爪壓簧的預(yù)緊力為定值,在粗定位過程中導(dǎo)向爪隨著下對接座圓錐面直徑的增大,其伸展角度將隨之變大,因此導(dǎo)向爪與圓錐面接觸力也逐漸增大.當(dāng)二者接觸力大到一定程度時,導(dǎo)向爪局部接觸點因屈服極限的限制可能會出現(xiàn)塑性變形,最終導(dǎo)致導(dǎo)向爪定位功能失效,為此需對導(dǎo)向爪的強度和安全性進(jìn)行分析.
下對接座采用鋼絲繩提升,故無法完全保證下對接座中心軸線與上定對接頭軸線完全重合.在實際工作過程中由于其工作條件和環(huán)境的限制,下對接座軸線與上定對接頭軸線可能會出現(xiàn)一定角度的偏差.本對接裝置因采水器穿過船體開孔,故可以將采水器偏擺角度限制在3°以內(nèi).圖6記錄了導(dǎo)向爪在4種壓簧選型下的接觸受力情況.
由仿真圖6可以看出,在設(shè)定3°的對接座不同的方位偏向角時,4個導(dǎo)向爪的接觸受力情況不一樣,這與仿真輸入的初始條件有關(guān).如果設(shè)置為45°面及135°面時,對接座在偏擺對接過程中有2只導(dǎo)向爪同時接觸下對接座錐鋼套,這樣分析得到的導(dǎo)向爪力不能達(dá)到最大.為此設(shè)置偏向在xOz及yOz面,得到的對接過程中的導(dǎo)向爪的最大接觸力如表3所示.
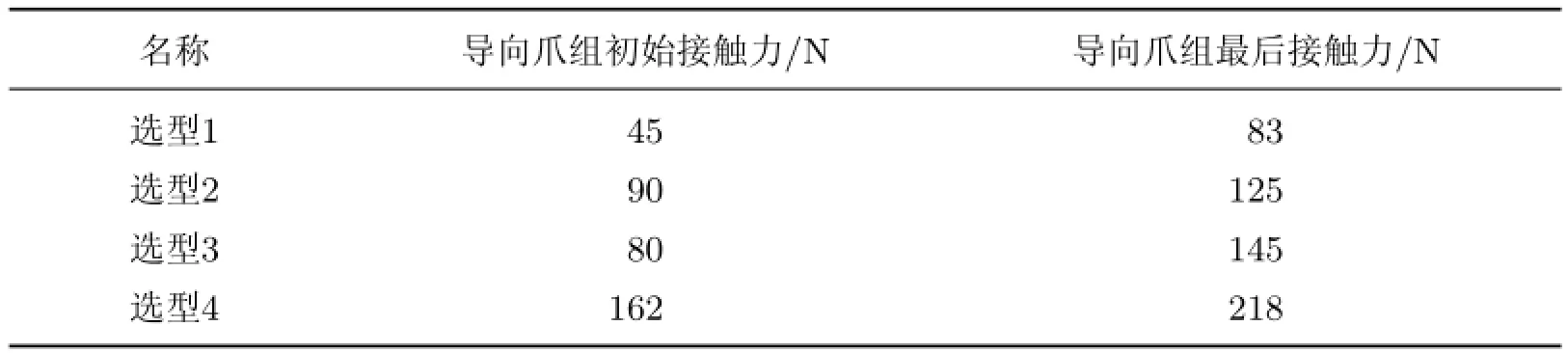
表3 不同導(dǎo)向爪壓簧選型對應(yīng)的接觸力Table 3 Contact force of diferent guide claw compression springs
由仿真圖6還可以看出,對于每一個導(dǎo)向爪壓簧選型來說,有兩個對稱導(dǎo)向爪與對接底座接觸,其中一個接觸后會迅速脫開,對對接機的中心線起調(diào)整作用;而對稱的另一個導(dǎo)向爪接觸后接觸力顯著增大.另2個導(dǎo)向爪與底座正常接觸,接觸力呈線性增加,說明沒有起調(diào)整作用,符合導(dǎo)向爪隨對接座上升導(dǎo)向爪夾角增大彈簧壓縮力也增大的要求.
另外,由于導(dǎo)向爪壓簧選型不同,故對接裝置的效果不一樣.導(dǎo)向爪壓簧的彈簧力越大,對接效果就越好,但隨著導(dǎo)向爪的接觸力增大,對導(dǎo)向爪的強度及剛度提出了更高要求,為此推薦選用更粗的彈簧及更大的壓縮力,同時增大導(dǎo)向爪尺寸.
3.2 對接機構(gòu)導(dǎo)向爪有限元分析
為驗證本裝置的合理性,采用SolidWorks Simulation對影響最大的關(guān)鍵部件導(dǎo)向爪2進(jìn)行有限元分析.導(dǎo)向爪材質(zhì)為316L,抗拉強度極限[σb]≥480 MPa.屈服極限為172 MPa,設(shè)置邊界條件:導(dǎo)向爪與錐鋼套接觸部分力在選型4中為218 N,導(dǎo)向爪上孔與軸采用絞接,中間圓形部分為彈簧著力點,按接觸平面代替.仿真分析結(jié)果如圖9所示.
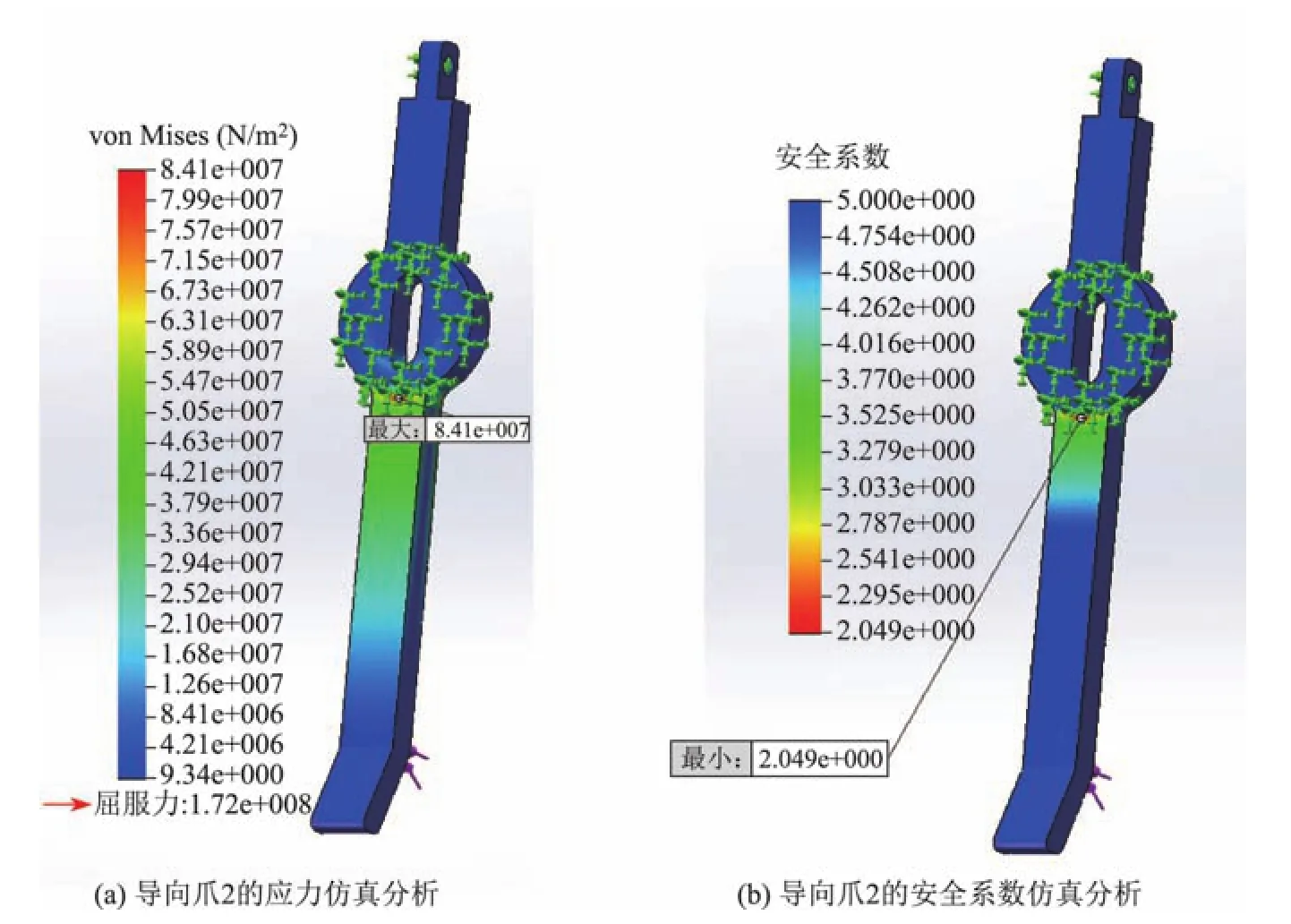
圖9 仿真分析Fig.9 Simulation analysis
通過如圖9(a),(b)仿真計算可知,本裝置基本滿足設(shè)計要求,導(dǎo)向爪2與鋼錐套接觸部分的接觸應(yīng)力為84.1 MPa,而屈服應(yīng)力極限為172 MPa,其最小安全系數(shù)為2.049,強度最弱點位于中間偏上位置,后期可對此加強處理.
4 結(jié)論
(1)設(shè)計了一套海水采樣對接裝置,實現(xiàn)了海水分層采樣到分配儲存系統(tǒng)的傳輸,解決了海水從采水器到分配儲存系統(tǒng)的對接傳輸中出現(xiàn)的問題;
(2)使用SolidWorks Motion仿真了采水對接傳輸裝置的運動過程,分析消除了影響對接精度的因素;
(3)使用SolidWorks Simulation解決了最重要關(guān)鍵件導(dǎo)向爪2的強度設(shè)計問題;
(4)通過對彈簧力的仿真計算,優(yōu)選了彈簧在本裝置的設(shè)計參數(shù).
綜上所述,本工作設(shè)計了一套海水采樣對接裝置.通過二次桿錐定心,完成O形密封圈的裝配工作.借助彈簧的阻尼減震作用及波紋管的補償軸向位移及徑向偏心的功能,使對接過程中的各種偏差得到消除,并且零部件直接接觸部分全部采用316L材質(zhì),較好地解決了壽命問題,取得了有同類腐蝕液體傳輸要求的新突破.
參考文獻(xiàn):
[1]RIJKENBERG M J A,DEBAAR H,BAKKER K,et al.“PRISTINE”,a new high volume sampler for ultraclean sampling of trace metals and isotopes[J].Marine Chemistry,2015,177:501-509.
[2]于文鵬,王巍,宗光華,等.抓持式對接機構(gòu)的設(shè)計及分析[J].機器人,2010,32(2):233-240.
[3]WEI H,HuANG Y Y,CHEN X Q,et al.Flexible cone impact dynamics based on space probe-cone docking mechanism[J].Science China Physics,Mechanics&Astronomy,2014,49(1):1053-1061.
[4]ROMANO M,FRIEDMAN D A,SHAY T J.Laboratory experimentation of autonomous spacecraft approach and docking to a collaborative target[J].Journal of Spacecraft and Rockets,2007, 44(6):164-173.
[5]UI K,MATuNAGA S,SATORI S,et al.Microgravity experiments of nano-satellite docking mechanism for fnal rendezvous approach and docking phase[J].Microgravity Science and Technology, 2005,17(3):56-63.
[6]XIA J,DuRFEE W K.Experimentally validated models of O-ring seals for tiny hydraulic cylinders[C]//Asme/Bath Symposium on Fluid Power and Motion Control.2014,DOI: 10.1115/FPMC2014-7825.
[7]SIEBEN C,REINHART G.Development of a force-path prediction model for the assembly process of O-ring type seals[J].Procedia Cirp,2014,23:223-228.
[8]崔青玲,李建平,張曉明.優(yōu)化設(shè)計前后波紋管位移補償能力的有限元分析[J].機械設(shè)計與制造, 2013(7):197-198.
[9]BAKsYˇs B,BAsKuTIEN˙E J,POVILONIs A B.Experimental investigation of parts vibratory alignment exciting immovably based part[J].Mechanics,2016,59(3):42-48.
[10]DELROBAEI M,MCIsAAC K A.Docking joint for autonomous self-assembly[C]//Conference on Electrical&Computer Engineering.2008:1025-1030.
[11]王立權(quán),王才東,王文明.水下液壓油路對接裝置的結(jié)構(gòu)及精度研究[J].哈爾濱工程大學(xué)學(xué)報(英文版),2010,31(9):1253-1258.
[12]ALLEN B,AusTIN T,FORREsTER N,et al.Autonomous docking demonstrations with enhanced REMUS technology[C]//Oceans.2006:1-6.
Design of a seawater sampling and docking transmission device
YANG Chao1,GUO Weiqi2,JIN Zuowen3,YANG Yi4,LI Xiaomao4, LIU Mingque4,PENG Yan4
To solve the docking problem of seawater sampling from lifting multi-bottle sampling arrays to storage and distribution,a set of design schemes for seawater transfer docking device according to seawater sampling requirements is proposed.The docking transmission device is composed of an upper fxed joint and a lower docking seat,where 4 compressed guide claws surrounding the upper joint contact the lower cone,making a rough claws-cone docking mechanism and compensating rod and cone docking of the second fne docking of the positioning error to lessen the positioning accuracy requirements.The mechanical structure ensures to meet the requirements of O-ring assembly in the seawatereccentric fow channel from the samplers to the distribution system.To eliminate the infuence of variations in the docking process,the axial displacement and radial eccentricity are compensated by the fexible connection of the corrugated pipe.The purpose is to prolong the service life of the device.Based on the SolidWorks Motion simulation,the centering process of the whole docking system is simulated to reveal infuence of various kinds of variations on the docking mechanism.The stress state of the guide claw in the docking process is simulated with SolidWorks Simulation,showing rationality of the structure design.
seawater sampling;auto-connect release;O-ring seal;spring damping shock absorption;corrugated pipe compensation
TH 122
A
1007-2861(2017)01-0037-10
10.3969/j.issn.1007-2861.2016.07.008
2016-12-07
國家自然科學(xué)基金資助項目(51675318,51305271,61525305);上海市優(yōu)秀學(xué)術(shù)帶頭人計劃項目(15XD1501800)
郭偉其(1965—),男,教授,研究方向為海洋工程勘察.E-mail:guo-weiqi@163.com
(1.Systems Engineering Research Institute,China State Shipbuilding Corporation,Beijing 100036,China; 2.State Oceanic Administration,East China Sea Marine Environment Survey and Investigation Center, Shanghai 200137,China; 3.East China Sea Branch,State Oceanic Administration,Shanghai 200137,China; 4.School of Mechatronic Engineering and Automation,Shanghai University,Shanghai 200072,China)