無人水面艇仿真系統設計與實現
2017-04-10 02:54:16胡辛明張鑫鐘雨軒彭艷青楊毅姚駿峰
上海大學學報(自然科學版) 2017年1期
關鍵詞:規劃
胡辛明,張鑫,鐘雨軒,彭艷青,楊毅,姚駿峰
(1.上海大學機電工程與自動化學院,上海 200072;2.中國人民解放軍理工大學理學院,南京 210007)
無人水面艇仿真系統設計與實現
胡辛明1,張鑫1,鐘雨軒1,彭艷青2,楊毅1,姚駿峰1
(1.上海大學機電工程與自動化學院,上海 200072;2.中國人民解放軍理工大學理學院,南京 210007)
無人水面艇(unmanned surface vehicle,USV)的海上調試成本高、難度大、效率低.為了減少海上調試工作量,設計了仿真系統,規劃了仿真流程,為無人水面艇控制系統的測試和分析提供了平臺.該仿真系統包括5個模塊:顯控模塊用于全局路徑規劃和綜合信息監控;數據仿真模塊模擬障礙檢測傳感器與位置和姿態傳感器數據;障礙處理模塊對檢測數據進行預處理、柵格化、聚類和擬合,并對擬合后的動態障礙進行跟蹤;導航和避障模塊嵌入視線制導(line of sight,LOS)導航和橢圓聚類-碰撞錐推演的動態避障算法;運動控制模塊采用廣義預測控制-比例積分(generalized predictive control-proportion-integral-derivative, GPC-PID)串級控制方法.各個仿真模塊具有獨立性,可根據不同需求替換.仿真實驗結果表明了該系統設計的正確性和合理性.
無人水面艇;仿真系統;全局路徑規劃;導航和避障;運動控制
無人水面艇(unmanned surface vehicle,USV)平臺具有體積小、速度快、機動靈活等特點,根據不同的搭載平臺,無人水面艇具有不同的功能,如海事管理、海上搜救和水文環境監測等.然而,無人水面艇控制系統比較復雜,海上調試存在成本高、難度大和效率低等問題.為了減少海上調試時間,需要設計仿真系統,對無人水面艇控制系統進行測試,為海上調試做好充分的準備工作.
目前,國內外學者已經對無人水面艇進行了比較深入的仿真研究.挪威科技大學的Fossen和Breivik等研究了無人水面艇的航跡跟隨[1-3]、動態定位[4-5]、目標跟蹤[6]等問題,闡述了基于視線制導(line of sight,LOS)導航方法;并利用CS2(cybership 2)船模型搭建了半實物仿真平臺[7],對航線和艏向的數據進行分析,證明了導航算法的有效性.Larrazabal等[8]利用Nomoto模型建立了艇體的辨識模型,設計了基于遺傳算法的增益比例積分控制最優化(gain scheduling proportional-integral-derivate control optimized by genetic algorithms,GS-PIDGAs)控制器,結合模糊邏輯控制器來解決動力學的不確定問題,仿真實驗結果表明,航線和航向角偏差較小,滿足要求.吉林大學的楊樹仁[9]基于電子海圖設計了單機非實時船舶運動控制仿真系統,該仿真系統由5個部分組成:航跡控制器、舵機執行機構、舵機反饋機構、船舶運動模擬器和電子海圖,并對A,B,C類船進行了3級海浪干擾仿真實驗,結果可以看出航線和航向偏差都滿足航跡控制要求.哈爾濱工程大學的盧艷爽[10]設計的仿真系統包括全局路徑規劃、航跡跟蹤和動態避障等,并規劃了仿真流程.本工作基于A*啟發式搜索算法(A*算法)實現全局路徑規劃,采用“跟隨目標”的方法實現無人水面艇的航線無障礙跟蹤,提出“遠域協商”動態避障方法,并進行了動、靜態障礙物避障仿真實驗.
已有的無人水面艇仿真主要針對單一特定功能,系統較為簡單,而本工作從全局路徑規劃、傳感器數據模擬、障礙檢測和跟蹤、運動控制、導航和避障等方面系統性地提出了相對完備的仿真方案,為無人水面艇控制系統提供測試和分析平臺,可減少30%~40%的海上調試工作量,對縮短無人水面艇研發周期,提高海上調試效率有重要意義.本工作主要貢獻如下:
(1)提出了無人水面艇仿真系統設計方案;
(2)基于生物激勵神經網絡的完全遍歷路徑規劃方法,結合電子海圖提供的障礙信息,實現了全局路徑規劃;
(3)仿真羅經和GPS數據,根據Nomoto模型和廣義預測控制-比例積分(generalized predictive control-proportion-integral-derivative,GPC-PID)串級航跡控制方法,提出了無人水面艇的位置和姿態更新方法;
(4)仿真激光數據,根據連通域標記法、K-means算法思想實現障礙的檢測,基于Kalman濾波算法實現動態障礙跟蹤;
(5)在無人水面艇仿真系統中加入了海浪干擾并進行了仿真實驗,實驗結果證明了本系統設計的合理性.
1 無人水面艇仿真系統設計方案
通常,無人水面艇系統包括無人艇艇體、顯控臺、GPS、羅經、激光、4G雷達、前視聲納、運動控制計算機等[11],其中顯控臺與無人水面艇之間通過無線進行信號傳遞,顯控臺根據任務類型進行路徑規劃,并監控無人水面艇的綜合狀態信息;GPS和羅經采集位置和姿態信息;激光和4G雷達用于海面障礙檢測;前視聲納用于海下障礙檢測;運動控制計算機內部包含障礙處理算法、導航和避障算法、運動控制算法,結合航線、位置和姿態、障礙信息,計算并控制噴泵的輸出和舵機的轉動,從而控制無人水面艇的運動.
由以上無人水面艇系統信息傳遞過程規劃出仿真系統的流程(見圖1).設置全局任務路徑、障礙物和無人水面艇的初始位置和姿態,當激光檢測到障礙物,經過障礙處理,將障礙信息傳遞給導航和避障模塊;隨后導航和避障模塊根據路徑、障礙信息以及位置和姿態信息計算處理,得到無人水面艇的航向和速度,而將航向和速度變化作為運動控制的輸入,輸出舵角和油門,舵角和油門用于位置和姿態的更新;位置更新后,判斷無人水面艇是否到達路徑終點,若沒有,則在新的位置繼續進行障礙檢測,并將新的位置和姿態信息、障礙信息作為導航和避障的輸入,更新數據,直到無人水面艇到達路徑終點.
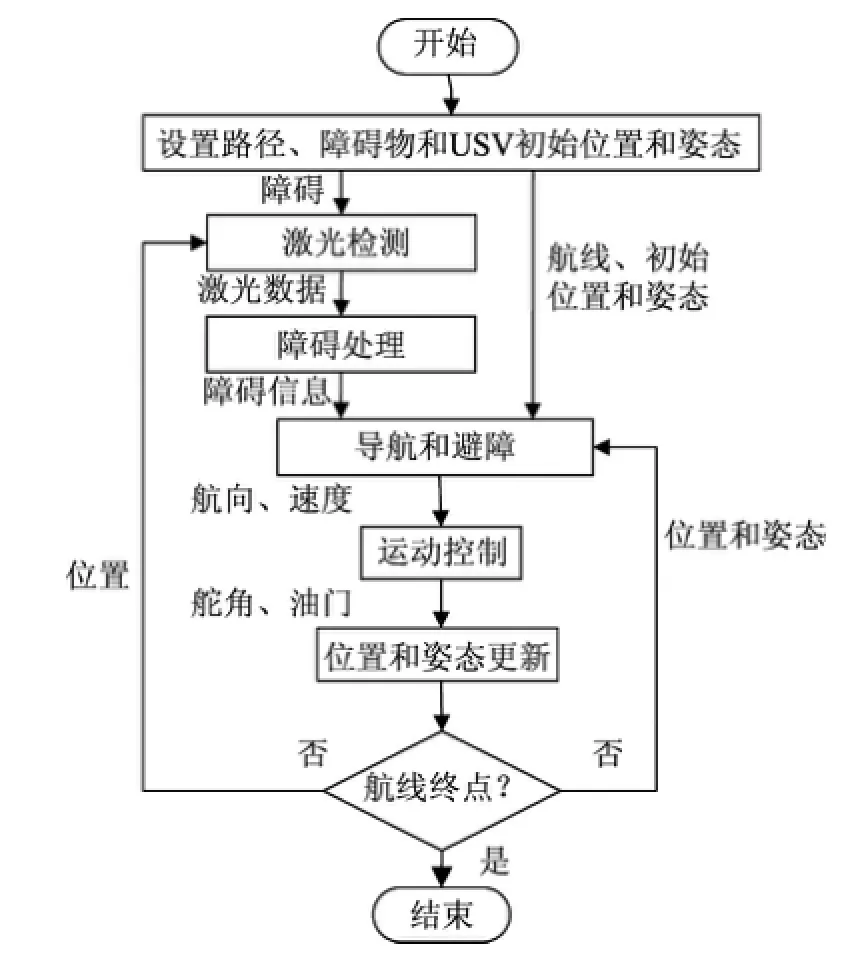
圖1 仿真系統流程圖Fig.1 Flow chart of simulation system
由無人水面艇仿真流程可確定仿真系統設計方案.仿真系統軟件分為5個模塊:顯控模塊、數據仿真模塊、障礙處理模塊、導航和避障模塊、運動控制模塊,其中顯控模塊實現全局路徑規劃和監控,數據仿真模塊仿真激光、羅經和GPS數據,導航和避障模塊用于控制無人水面艇航向和速度,而運動控制模塊則是根據航向和速度變化控制舵角和油門.
2 無人水面艇仿真系統構成
2.1 顯控模塊
顯控模塊是基于電子海圖實現的.電子海圖具有地理信息獲取和顯示、船舶速度航向監控、報警等功能.顯控模塊主要進行全局路徑規劃和無人水面艇的綜合信息顯示.全局路徑規劃分為任務區域覆蓋掃測和多點規劃,其中任務區域覆蓋掃測是在給定任務掃測區域規劃出繞開障礙物的最優掃測路徑;多點規劃是用于無人水面艇布放和回收時,在海圖上人工選取路徑點,自動生成繞開障礙物的最短航行路線.
電子海圖提供的靜止障礙物包括海岸線、碼頭、浮標和島嶼等.任務區域的覆蓋掃測是基于生物激勵神經網絡的完全遍歷路徑規劃方法實現[12],其中生物激勵神經網絡用于移動機器人工作環境建模,而完全遍歷路徑規劃包括模板模型法和A*算法,能夠實現復雜島礁區域周圍環境的遍歷.圖2(a)為在電子海圖上實現的存在島礁的任務區域覆蓋掃測,只要給定掃測范圍、起點、方向和距離就可以自動規劃出最優掃測路徑;圖2(b)為在海圖上實現的多點規劃(多點規劃是基于A*算法實現的,能夠實現代價最小的路徑規劃),只要給定路徑點就可以規劃出一條繞開障礙物的最短航行路徑.
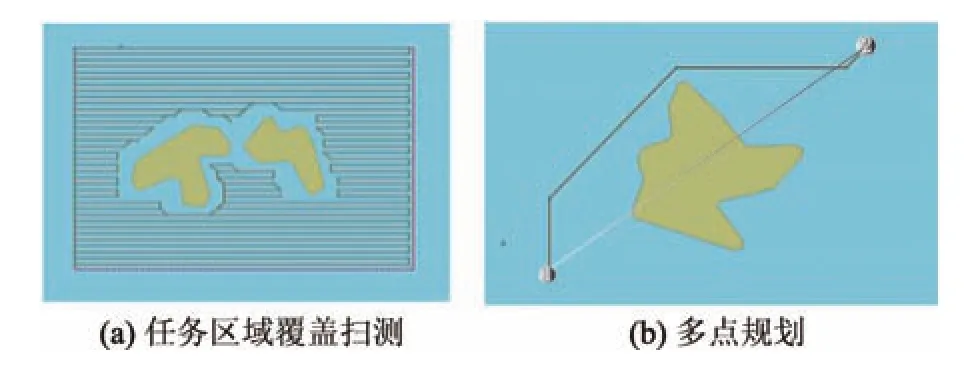
圖2 全局路徑規劃Fig.2 Global path planning
2.2 數據仿真模塊
數據仿真模塊包括仿真障礙檢測、位置和姿態數據,其中障礙檢測數據指的是激光掃到物體后得到的距離和角度,位置和姿態數據是由GPS和羅經采集得到的位置和姿態信息.
2.2.1 激光數據仿真
激光測距[13]的方法有多種,但目的都是為了獲取目標的角度和距離.常用的方法是脈沖法,即在工作時向目標射出3維很細的激光(由光電元件接收目標反射的激光束),計時器測定激光束從發射到接收的時間差,從而得到距離.

式中:D為激光傳感器與被測障礙物之間的距離;c為光在真空中的傳播速度(3×108m/s);?T為激光兩路脈沖信號之間的時間間隔;?是激光傳輸介質的平均反射率,在空氣中取1.
通常,激光的掃描距離D、掃描范圍?、角度分辨率?θ都為已知參數.將激光安裝在無人水面艇上時,激光中垂面與艇的中垂面重合.在電子海圖里以激光位置為原點,艏向為x軸,建立平面直角坐標系.設置圓形的障礙物位置和大小,Pn(x,y)為激光束打在障礙物上的點(見圖3),則可以得到每一個激光束與x軸夾角θn,即獲得了激光角度信息.聯立激光束直線方程和圓的方程,可以得到激光束與圓的交點Pn(x,y)的坐標值,求得距離D,取其中較小值;若無交點,則距離D=0,即可得到激光的距離信息.依此類推,可以得到所有激光束數據,激光數據仿真即可完成.
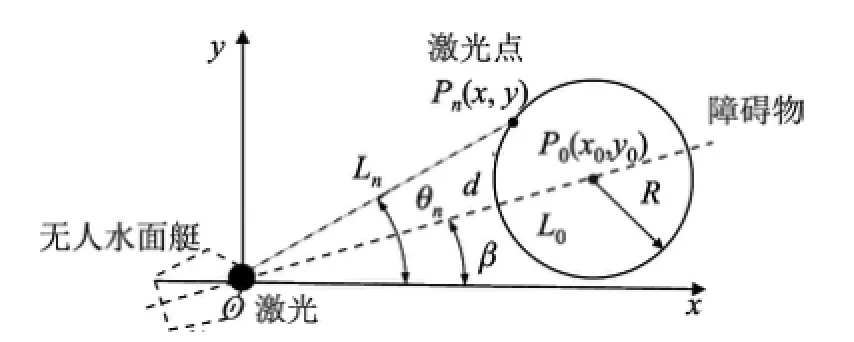
圖3 激光數據仿真Fig.3 Simulation of laser data
2.2.2 位置和姿態數據仿真
無人水面艇的位置坐標和速度由GPS采集,姿態信息由羅經采集.姿態信息包括航向角、艏向角、俯仰角、橫滾角、航向角速度、艏向角速度、俯仰角速度和橫滾角速度等.由于與導航和避障相關的數據主要包括位置坐標、航向角、航向角速度和速度,故仿真系統針對這4個參數進行仿真.
航向角速度由舵機運動決定,并受到艇體本身結構、慣性和風浪的影響.常用的舵角與航向角速度的辨識模型為經典的Nomoto模型[14],本工作采用簡化的一階Nomoto模型,即舵角變化δ和航向角速度r的關系為

式中,S為傳遞函數,K為靜態航向角速度增益,T為時間常數.航向角變化量?ψ由航向角速度r積分得到,由此可以得到航向角ψt:

式中,f為更新頻率,ψt?1為上一幀航向值.無人水面艇的速度大小由油門控制,油門與速度可以用簡單的線性關系表示,即

式中,k為油門系數.無人水面艇的位置變化量?P由速度V和航向ψ決定,由此可以得到位置坐標:
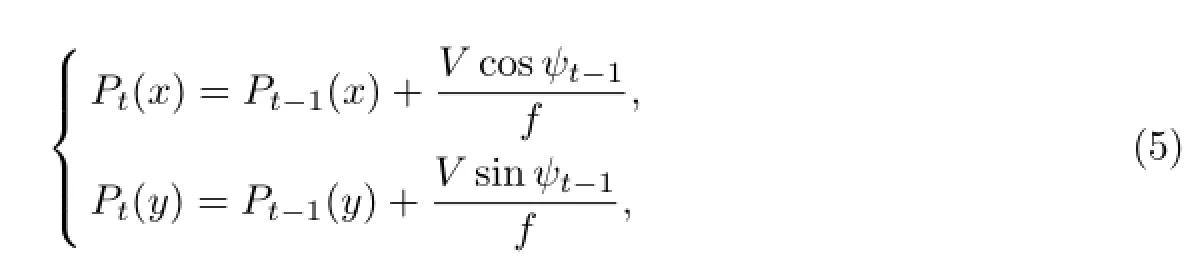
式中,ψt?1為上一幀航向值.
2.3 障礙處理模塊
激光數據處理模塊包括障礙檢測和跟蹤.障礙檢測是將激光采集的數據處理成橢圓障礙,其過程包括預處理、柵格化、聚類和擬合等.預處理是去除激光里面的特殊點,對于多線激光,還需將激光點投影到同一個平面;柵格化的方法比較多,本工作采用最大最小高度圖法[15-16]對激光數據進行柵格化;采用通常用在二值圖像處理的連通域標記算法[17-18]對柵格進行聚類,得到障礙物塊;海上障礙多為船只,船只長和寬的比例較大,可以近似看成橢圓,基于K-means算法思想[19],對聚類的障礙物塊的形狀進行近似擬合,形成橢圓的障礙信息.激光數據處理過程如圖4所示.

圖4 激光數據處理Fig.4 Laser data processing
圖5為對實際場景中采集的激光數據進行處理的結果,其中(a)為多線激光檢測實際場景,(b)為多線激光檢測障礙物得到的立體點云,(c)為經多線激光數據處理形成的橢圓障礙信息.
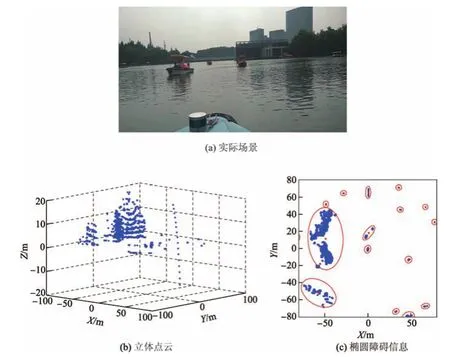
圖5 實際場景激光檢測處理結果Fig.5 Laser detection results of real scene
現實中的障礙物多為動態,對障礙物位置和速度進行預測必不可少.障礙目標跟蹤有兩個作用:一是減少或消除傳感器的檢測誤差,二是為動態避障提供預測位置和速度信息.Kalman濾波器是一種線性遞歸濾波器[20],是用于狀態最優估計的常用算法,通過動態的狀態和觀測方程描述系統,并采用遞歸濾波方法預測下一個狀態的最優估計.由于仿真激光數據采樣時間間隔短,處理得到的橢圓目標運動狀態變化小,故將目標運動定為勻速直線運動.將運動橢圓的中心軌跡作為輸入,利用最近鄰域法將測量值與預測值進行關聯,并采用Kalman濾波進行最優狀態估計,從而得到下一時刻的橢圓障礙物位置和速度信息.圖6為基于Kalman濾波算法的障礙目標跟蹤過程.
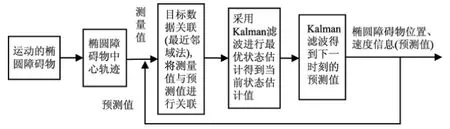
圖6 障礙目標跟蹤Fig.6 Tracking of obstacle target
2.4 導航與避障模塊
在電子海圖上利用全局路徑規劃方法生成任務路徑,其中導航算法是控制無人水面艇在復雜的海洋環境干擾下,按照既定路徑進行航行,故導航算法是無人水面艇執行任務的前提,導航算法的優劣直接影響到任務的執行結果.LOS是一種直線循跡的方法,該算法首先在航行路段上虛擬出一個追蹤目標,然后引導船舶沿著船舶到追蹤目標的視線方向航行.目前,常用的虛擬追蹤目標確定方法主要包括封閉圈法和超前置位法.本仿真系統采用封閉圈法,即以船舶為圓心建立一個半徑固定不變的封閉的圓圈,將封閉圈與計劃航線的交點設為虛擬目標點.隨著船舶不斷接近計劃航線,船舶航向偏差也隨之減小,這樣就達到同時減小位置和航向偏差的目的.

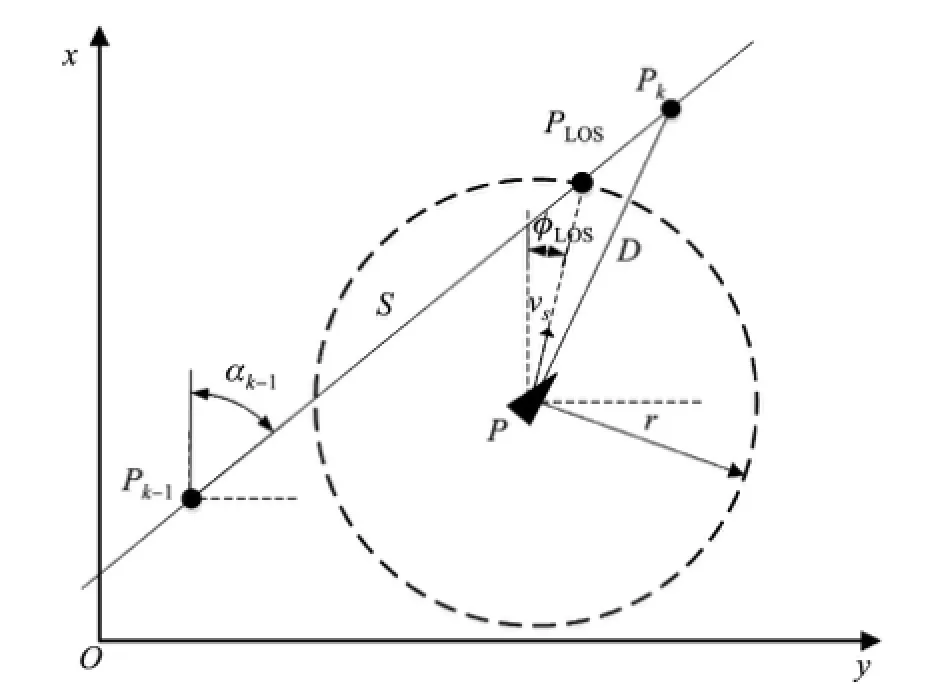
圖7 LOS封閉圓導航Fig.7 Navigation of LOS closed circular
無人水面艇在海上執行任務時會遇到其他船舶、島礁、燈塔等障礙物,因此避障功能是其安全航行的重要保障.海上航行的船舶需要遵循《國際海上避碰規則》,已有很多基于《國際海上避碰規則》的導航避障算法,如神經網絡算法、進化算法、模糊邏輯算法、2D柵格地圖等.本工作中的避障算法遵循《國際海上避碰規則》,基于橢圓聚類-碰撞錐推演的無人水面艇海洋動態避障控制方法實現無人水面艇避障.該方法是基于Chakravarthy等[21]和Fiorini[22]的點與點、點與圓的碰撞錐方法,其本質是在未知軌跡的移動目標之間進行碰撞檢測,根據已計算出的碰撞錐區間采取相應的避碰措施.無人水面艇采取避障措施后會偏離原先設定的路徑,因此利用LOS導航算法可實現其航跡回歸.
2.5 運動控制模塊
導航和和避障算法的輸出是期望速度和航向(速度和航向的變化是由油門和舵機決定的),運動控制模塊主要是接收航跡跟蹤和避障算法輸出的期望速度和航向,計算處理后產生油門和舵角值.油門值可由式(4)反推得到,即

而舵角值的確定則需利用GPC-PID串級控制方法[23],將廣義預測理論與PID控制器相結合,來克服無人水面艇系統中存在的時滯,故該系統具有較強的魯棒性和抗干擾能力.GPC-PID運動控制原理如圖8所示.
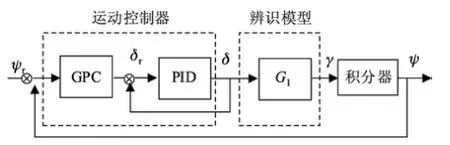
圖8 GPC-PID串級運動控制Fig.8 GPC-PID cascade motion control
圖8中,ψr為航跡跟蹤和自主避障模塊輸出的期望航向角,ψ為實際航向角,ψr和ψ作為GPC的輸入量輸出控制量δr,而δr作為PID輸入量輸出舵角δ,G1為2.2.2節提到的一階Nomoto模型,其輸出為航向角速度γ.
2.6 航向干擾
無人水面艇在航行過程中會受到風、浪、流的干擾,其中風浪會對無人水面艇的艏搖、橫搖和縱搖產生影響,故本工作加入2階風浪模型對艏搖產生干擾[24]:

式中,ω(s)為高斯白噪聲,h(s)為2階海浪傳遞函數,

其中λ為阻尼系數,ω0為海浪頻率,σ為海浪強度.
3 仿真實驗
在完成仿真系統中的流程和方案設計后,為了驗證仿真系統設計的正確性和合理性,以航線跟蹤精度和避障效果為指標對仿真系統進行實驗.本仿真實驗為半實物仿真,硬件平臺有顯控、仿真和控制計算機等.
3.1 算法步驟
利用顯控計算機進行全局路徑規劃,由仿真計算機更新位置、仿真障礙信息等,由控制計算機根據任務航線、障礙信息、輸出期望油門和舵角給仿真計算機,以便進行位置和姿態更新.仿真實驗算法步驟如下:
(1)設定全局路徑L、障礙物Φ,初始化無人水面艇位置和姿態,如位置P(x,y)、航向ψ、速度V等;
(2)激光檢測Φ,輸出激光數據,經過障礙處理后得到障礙物Φ′;
(3)導航和避障根據L,Φ′,P(x,y),ψ,計算輸出期望航向ψr和速度Vr.
(4)將ψr,Vr作為運動控制的輸入量,輸出舵角δ和油門E;
(5)將δ,E作為位置和姿態更新的輸入,輸出更新后的位置和姿態信息P(x,y),ψ,V,航向角速度γ;
(6)循環執行步驟(2)~(5),直到到達路徑結束點.
3.2 仿真對象
本仿真實驗以上海大學“精海3號”無人水面艇的控制系統為仿真對象,艇體和激光參數如表1和2所示.

表1 上海大學“精海3號”無人水面艇參數Table 1 Parameters of“Jinghai No.3”USV of Shanghai University

表2 激光傳感器參數Table 2 Parameters of laser sensors
經測試,“精海3號”無人水面艇靜態航向角速度增益K=0.3176,時間常數T=0.2417,舵角與航向角速度關系為

根據Fossen的理論[25],通常情況下海浪干擾參數Kω=4693.9,λ=0.12,ω0=0.8,則

3.3 仿真實驗結果和分析
仿真實驗基于電子海圖來實現,圖9(a)~(c)依次為無人水面艇任務區域覆蓋掃測、動態避障和多障礙避障實驗結果.圖中黑色同心圓為無人水面艇,紅色圓為障礙物,藍色半圓點云為激光打在障礙物上的點,褐色圓為障礙處理后得到的障礙信息,紅色軌跡線為障礙信息的運動軌跡,紅色虛線圓為激光檢測范圍.可以看出,無人水面艇在遇到障礙物后能夠按照正確的方向進行避障并回歸航線.
如圖10所示,在導航循跡實驗中,取50 s,500幀數據進行分析,其中(b)和(c)為航跡、航向偏差情況.實驗得出最大航跡偏差為13.1 m,最大航向偏差為10.7°.結果滿足IEC 6206標準[26]航向偏差不超過15°,航跡偏差不超過35 m的航跡控制要求.取“精海3號”在東海2級海況下測繪數據進行分析,得到最大航跡偏差為9.7 m,最大航向偏差7.8°.經分析可知,仿真結果和實際實驗結果相近,仿真結果偏差較大的原因是受海浪干擾模型影響較大.
4 結束語
本工作為提高海上調試效率,為無人水面艇的控制系統提供了測試和分析平臺,搭建了仿真系統;提出了無人水面艇仿真系統設計方案,即將仿真系統分為5個模塊,利用電子海圖信息和生物激勵神經網絡的完全遍歷路徑規劃方法實現全局路徑規劃,并根據無人水面艇在海上航行實際情況,實現了無人水面艇的位置和姿態更新;仿真了激光數據,進行障礙檢測處理,并對動態障礙進行運動預測.在進行導航和避障實驗中加入了2階風浪干擾,實驗結果和數據分析表明本仿真系統能對無人水面艇控制系統性能進行測試,驗證了所設計系統的合理性和正確性.
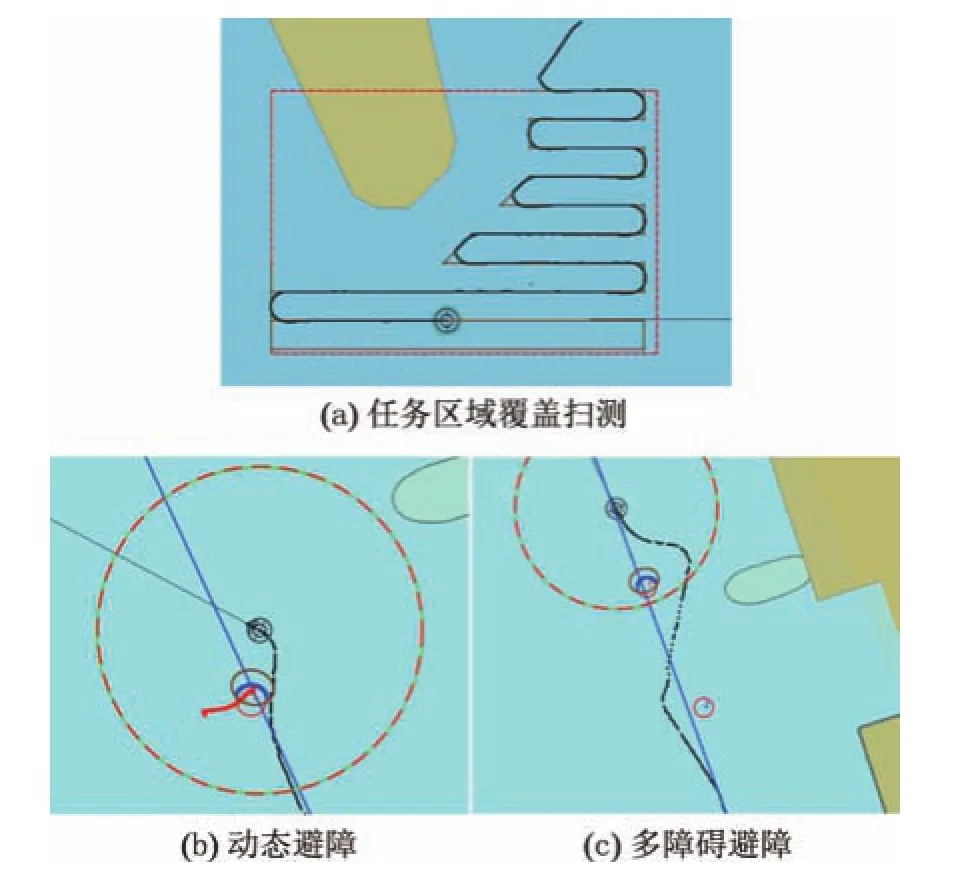
圖9 導航與避障仿真實驗Fig.9 Simulation experiments of navigation and obstacle avoidance
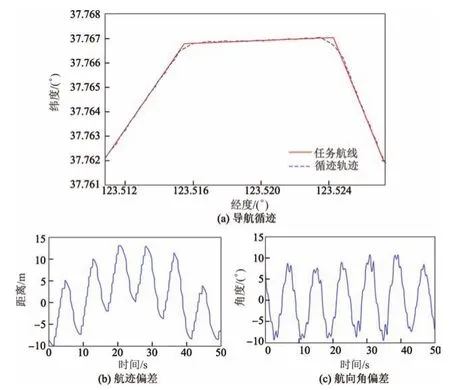
圖10 仿真實驗結果Fig.10 Results of simulation experiments
[1]FOssEN T I,BREIVIK M,SKJETNE R.Line-of-sight path following of underactuated marine craft[C]//Proceedings of the 6th IFAC MCMC.2003:244-249.
[2]PAVLOV A,NORDAHL H,BREIVIK M.MPC-based optimal path following for underactuated vessels[J].IFAC International Conference on Manoeuvring and Control of Marine Craft,2009, 42(18):340-345.
[3]BREIVIK M,HOVsTEIN V E,FOssEN T I.Straight-line target tracking for unmanned surface vehicles[J].Modeling,Identifcation and Control,2008,29(4):131-149.
[4]KJERsTAD K,BREIVIK M.Weather optimal positioning control for marine surface vessels[J]. IFAC Conference on Control Applications in Marine Systems,2010,43(20):114-119.
[5]BREIVIK M,STRAND J P,FOssEN T I.Guided dynamic positioning for fully actuated marine surface vessels[C]//Proceedings of the 7th IFAC MCMC.2006:1-6.
[6]BREIVIK M,FOssEN T I.Guidance laws for planar motion control[J].IEEE Conference on Decision and Control,2008,16(5):570-577.
[7]BREIVIK M.Nonlinear maneuvering control of underactuated ships[D].Trondheim:Norwegian University of Science and Technolgy,2003:75-79.
[8]LARRAZABAL J M,PE?NAs M S.Intelligent rudder control of an unmanned surface vessel[J]. Expert Systems with Applications,2016,55:106-117.
[9]楊樹仁.船舶航跡控制算法的研究與仿真[D].長春:吉林大學,2014.
[10]盧艷爽.水面無人艇路徑規劃算法研究[D].哈爾濱:哈爾濱工程大學,2010.
[11]楊學斌.無人艇體系結構研究[D].大連:大連海事大學,2011.
[12]朱博,鄧三鵬,王英飛,等.基于生物激勵神經網絡的移動機器人遍歷路徑規劃[J].裝備制造技術, 2014(12):30-32.
[13]YOON C.Human following of a mobile service robot with single laser range fnder[J].Journal of Measurement Science and Instrumentation,2012,3(1):94-98.
[14]Xu F,XIAO T,XING X W.Identifcation of Nomoto models with integral sample structure for identifcation[C]//Chinese Control Conference.2014:6721-6725.
[15]諶彤童.三維激光雷達在自主車環境感知中的應用研究[D].長沙:國防科學技術大學,2011.
[16]HIMMELsBACH M,M¨uLLER A,L¨uTTEL T,et al.LIDAR-based 3D object perception[C]// Proceedings of 1st International Workshop on Cognition for Technical Systems.2008.
[17]APPIAH K,HuNTER A,DICKINsON P,et al.A run-length based connected component algorithm for FPGA implementation[C]//International conference on Field-Programmable Technology. 2008:177-184.
[18]JOHNsTON C T,BAILEY D G.FPGA implementation of a single pass connected components algorithm[C]//4th IEEE International Symposium on Electronic Design,Test and Applications. 2008:228-231.
[19]LINGRAs P,WEsT C.Interval set clustering of web users with rough K-means[J].Journal of Intelligent Information Systems,2004,23(1):5-16.
[20]JABBARIAN M,BIZAKI H K.Target tracking in pulse-doppler MIMO radar by extended Kalman flter using velocity vector[J].20th Iranian Conference on Electrical Engineering.2012:1373-1378.
[21]CHAKRAVARTHY A,GHOsE D.Collision cones for quadric surfaces[J].IEEE Transactions on Robotics,2011,27(6):1159-1166.
[22]FIORINI P.Motion planning in dynamic environments using velocity obstacles[J].International Journal of Robotics Research,1998,17(7):760-772.
[23]彭艷,吳偉清,劉梅,等.無人艇航跡跟蹤GPC-PID串級控制[J].控制工程,2014,21(2):245-248.
[24]THOMAs S.Guidance system for autonomous surface vehicles[D].Trondheim:Norwegian University of Science and Technology,2015.
[25]FOssEN T I.Handbook of marine craft hydrodynamics and motion control[J].IEEE Control Systems,2016,36(1):78-79.
[26]劉廷偉.船舶航跡控制及氣象導航方法的研究[D].長春:吉林大學,2015.
Design and implementation of USV simulation system
HU Xinming1,ZHANG Xin1,ZHONG Yuxuan1PENG Yanqing2,
YANG Yi1,YAO Junfeng1
(1.School of Mechatronic Engineering and Automation,Shanghai University,Shanghai 200072,China; 2.College of Sciences,PLA University of Science and Technology,Nanjing 210007,China)
Ofshore commissioning for unmanned surface vehicle(USV)is costly,difcult and inefcient.To reduce the workload of sea tests,a simulation system is designed for test and analysis of USV control systems,and a simulation process is programed.The simulation system includes fve modules.The display and control module is used for global path planning and comprehensive information monitoring.The data simulation module simulates data of sensors for obstacle detection and positioning.The obstacle process module preprocesses,rasterizes,clusters and fts the detected data,and tracks moving obstacles.The navigation and obstacle avoidance module is made of line of sight(LOS) and an elliptical clustering-cone deduction algorithm.The cascaded generalized predictive control-proportion-integral-derivative(GPC-PID)method is used in the motion control module.Every simulation module is independent,and can be switched according to diferent requirements.The simulation results show that the described design of the simulation system for USV is accurate and reasonable.
unmanned surface vehicle(USV);simulation system;global path planning; navigation and obstacle avoidance;motion control
TP 242.3
A
1007-2861(2017)01-0056-12
10.3969/j.issn.1007-2861.2016.07.019
2016-12-15
國家自然科學基金資助項目(61673254,51675318);上海市自然科學基金資助項目(13ZR1454300);上海市科委能力建設資助項目(14500500400)
楊毅(1982—),男,副研究員,研究方向為機器人學.E-mail:yiyangshu@shu.edu.cn
猜你喜歡
房地產導刊(2021年6期)2021-07-22 09:12:46
中國石油石化(2021年9期)2021-07-17 09:24:00
中國農民合作社(2020年12期)2020-12-18 09:09:58
公民與法治(2020年11期)2020-07-25 02:02:06
河南水利年鑒(2020年0期)2020-06-09 05:43:30
領導決策信息(2018年50期)2018-02-22 06:17:16
商周刊(2017年5期)2017-08-22 03:35:26
制造技術與機床(2017年3期)2017-06-23 08:11:34
中國衛生(2016年2期)2016-11-12 13:22:16
華東科技(2016年10期)2016-11-11 06:17:41