基于RAP的深海水聲網連通性分析
2017-04-12 11:04:11馬旭卓方爾正
傳感器與微系統 2017年4期
關鍵詞:深度
馬旭卓, 方爾正, 許 惠
(哈爾濱工程大學 水聲工程學院,黑龍江 哈爾濱 150001)
基于RAP的深海水聲網連通性分析
馬旭卓, 方爾正, 許 惠
(哈爾濱工程大學 水聲工程學院,黑龍江 哈爾濱 150001)
可靠聲路徑(RAP)是深海水聲傳播中的一種特殊的物理現象。分析了RAP的物理機理,利用RAP模型計算聲場分布,以深海水聲網絡通信節點為基礎,結合圖論理論,在復雜海底地形地貌的條件下,仿真分析深海水聲網的連通性能。結果表明:該方法可以有效判斷出深海水聲聲吶網絡是否連通,并在網絡連通的前提下找到一條聲源到接收機的最優路徑。
深海水聲網; 可靠聲路徑; 傳播損失; 連通性; 圖論理論; Dijkstra算法
0 引 言
水下聲通信網絡的概念一經提出,就被廣泛接受并在海洋開發、海軍建設等方面引起了研究熱潮[1]。目前的水聲通信網絡多是建立在淺海區域,對深海條件下聲傳播的特性以及海底復雜的地形地貌對聲傳播的影響沒有充分的考慮,因而,在深海環境下建立可靠的水聲網絡需要解決更多的技術難題,也需要更完善的深海聲傳播理論。
對于一個水聲網,要求具有可靠通信性能。為了解決海山、海溝和山脊等對聲信息的有效傳輸產生的不利影響,需要找到一條即可靠又合理的高效能的路徑。而且在某些海域,深度往往會達到幾千米,因而,研究深海海域復雜地形地貌環境下水聲通信網絡的連通特性具有重要的意義。本文在分析可靠聲路徑的物理基礎上,將其與圖論理論相結合,完成深海環境下的水聲通信網絡連通性能的分析。由于可靠聲路徑本身特點所致,本文只考慮大深度下(> 3 000 m)水聲網的連通性能。
1 基于RAP的聲傳播損失計算
1.1 RAP理論分析
聲在海中可通過多種路徑傳播,具體的路徑與海水中的聲速結構以及聲源—接收機的位置有關。聲速分布圖(sound speed profile)是海洋中聲速隨深度變化的曲線圖,與地理位置、季節、一天中的時間和溫度有關。
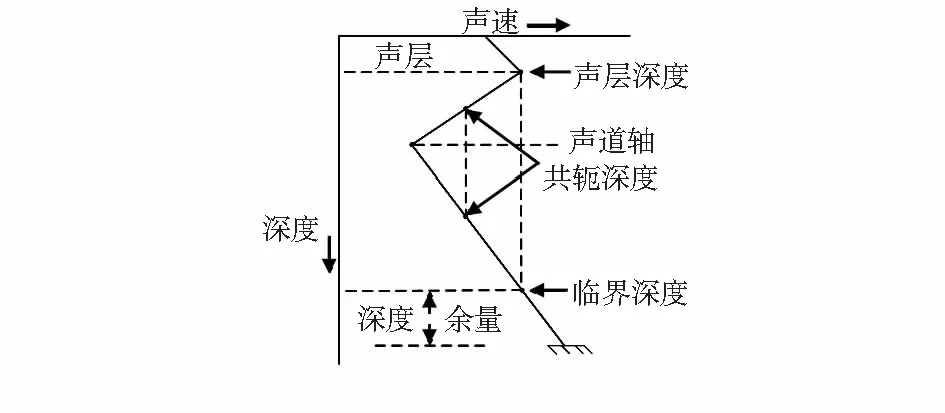
圖1 典型深海聲速剖面圖
RAP是深海水聲傳播中的一種特殊的物理現象。當聲源位置大于臨界深度時,同時,有足夠的深度余量,聲傳播路徑不受近海面效應或海底相互作用的影響,因此,與海面或海底附近的海洋環境特性關系較小,傳播信號穩定[2]。
相較于其他的聲傳播路徑,聲波通過RAP傳播時的傳播損失最小[3,4]。通過RAP海底聲吶設備可以探測到直徑約為水深10倍的海表區域。由于可靠聲道范圍外的噪聲經過反射、吸收和折射嚴重衰減,使主要的信號都在檢測范圍內,可以大大提高檢測精度。另外,海底附近的環境噪聲較低,因而海底裝備可以通過RAP在較高信噪比下檢測目標或接收數據。RAP所具有的優點,使得它在深海區域擁有廣泛的應用前景[5~7]。
1.2 RAP的計算和仿真分析
射線聲學的兩個基本方程:程函方程和強度方程[8,9,10],即
(1)
(2)
式中c0為參考點的聲速,聲速c=c(x,y,z),n(x,y,z)為折射率,A為聲壓幅值,是空間位置的函數,φ(x,y,z)的相位函數。根據程函方程(1),可得到
(3)
方程組(3)被用來確定聲線的方向。強度方程(2)確定了聲線的強度。射線聲學聲強計算公式為
(4)
式中 r為水平距離,W為單位立體角內的輻射聲功率,α0為聲線的初始掠射角,αz為接收點處的聲線掠射角。
求得聲強后,可由它得到聲壓振幅表示式,即
(5)
再結合從程函方程中求得的射線聲場的程函

(6)
式中 C為常數。便可得到射線聲場的表達式
p(r,z)=A(r,z)e-jk0φ(r,z)
(7)
定義聲傳播損失
(8)
根據式(7)和式(8)便可得到傳播損失。
深海環境下,由于水紋條件的不同,聲速地分布也不盡相同。
為了便于理論仿真分析,本文采用圖2所示的Munk聲速剖面。Munk聲速剖面是一個具有典型深海環境特性的理想聲速剖面,它將深海聲道傳播的基本特性很明顯地體現出來。Munk 剖面的聲速表達式為
c=c0[1+ε(zx-1+e-zx)]
(9)
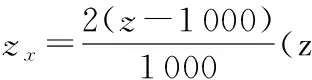

圖2 5 km Munk聲速剖面
以深海深度5 km為例,聲速剖面如圖2所示,對基于RAP模型的聲傳播路徑以及傳播損失進行仿真分析。
圖3中直線表示的是沒有經過海面和海底反射的聲線,即為RAP。虛線則表示聲波在傳播過程中受到海面或海底的影響的聲線,不是RAP。
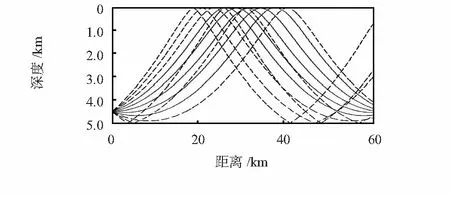
圖3 RAP
由圖4可見,在中等范圍內,聲場中沒有影區出現,且若在3維空間內看低傳播損失區域,聲場形似碗狀。而這些碗狀的區域就是RAP的主要工作區域。
圖4 聲源4.9 km,頻率1 kHz時的聲傳播損失
環境噪聲和設備自噪聲均可能影響接收換能器對信號的檢測能力,根據被動聲吶方程
DT=SL-NL+DI-TL
(10)
假設發射聲源級SL=180 dB,指向性指數DI=0 dB,噪聲級NL=100 dB,則有DT=180-100-TL,即DT=80-TL。認為只有當檢測閾值DT>0 dB時,接收換能器才能檢測到信號;否則,認為沒有信號。因此,只有當TL<80 dB時才能檢測到信號。
圖5中位于直線上方的曲線表示實際傳播損失小于傳播損失門限值,因此,從圖5可知,對于一個給定門限值的接收換能器,其可接收信號的水平范圍會受到聲傳播損失的影響。只有當接收換能器所處的位置在實際傳播損失小于門限值的水平區域內時,才能接收到目標信號。
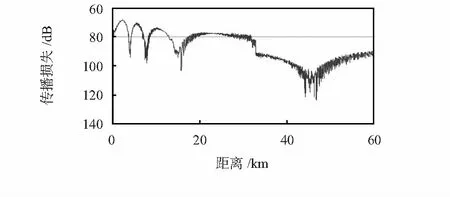
圖5 聲傳播損失
2 深海海底復雜地形對聲傳播的影響分析
深海海底復雜的地形地貌環境對聲傳播有重要的影響[10],了解并掌握深海海底復雜的地形地貌環境下的聲傳播規律,對我國走向深水、突破島鏈的限制起著關鍵性的作用。本文就深海海底山對聲傳播的影響進行仿真分析。
圖6給出了中心頻率為500 Hz,聲源深度4.95 km,存在海底山情況下的2維聲傳播損失圖。圖7給出了接收深度1 km時,有、無海山時的傳播損失對比圖。
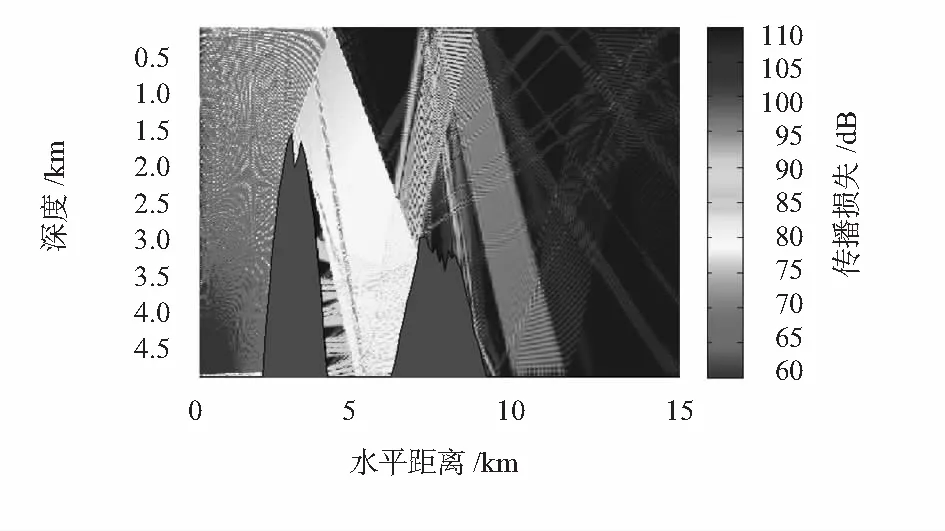
圖6 2維聲傳播損失
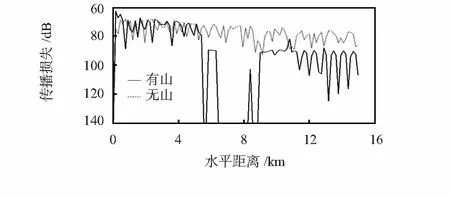
圖7 有、無海山條件下的傳播損失比較
由圖6和圖7可見:在靠近海山時(3 km附近),有海山時的傳播損失總體相對于無海山時的傳播損失要小;在經過海山后,有海山時的傳播損失明顯遠大于無海山時的情況。因此。由于深海海底山對聲傳播的影響,使得深海海底的水聲通信問題更為復雜化。
若接收點恰好位于由于海底山的阻礙造成的影區內,此時接收點接收到信息的概率幾乎為零。在地形地貌復雜的海底,單個通信節點是很難完成信息通信任務的,由多個通信節點組成的水聲網就顯得尤為重要[10~12]。
水聲網是否能實現信息的完整通信,首先就要確定這個水聲網是否是可連通的,因此對水聲網連通性的判斷估計是不可少的。
3 基于RAP與圖論理論的網絡連通性仿真與估計
本文采用的是深度優先遍歷(depth first search,DFS)算法[5]。如圖8所示,為了便于理解,圖中實線箭頭表示訪問方向,虛線箭頭表示回溯方向,帶括弧的數字代表搜索順序。由此可以得到頂點的訪問序列,即該圖的深度優先遍歷順序為V1→V2→V4→V5→V3→V6→V7。
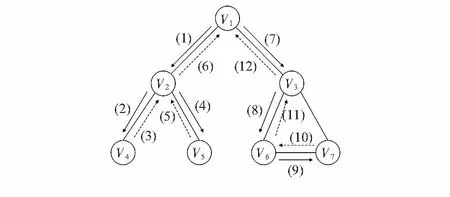
圖8 深度優先搜索遍歷示意圖
上述算法對連通圖而言,可以遍歷所有頂點,但對非連通圖卻不行。因此,當對一個圖進行一遍深度優先遍歷算法后,若仍存在未被訪問的頂點,則說明該圖是非連通圖;否則,則說明該圖是連通圖。
基于RAP和圖論理論對聲吶網絡連通性的判斷估計主要步驟如下:
1)將聲吶裝置布設在靠近海底的位置。聲源發出的聲波,由于深海RAP的存在,聲源至接收聲吶的聲傳播不受海底海洋環境的影響,因此聲傳播損失最小,仿真計算兩兩聲吶間的傳播損失。
2)將每一個聲吶裝置作為一個網絡節點,將兩兩聲吶裝置之間的最小的聲傳播損失作為連通系數,則該網絡系統可以看成是有向網圖,采用圖的深度優先遍歷方法對該圖進行搜索,判斷是否是連通圖。
3)若為連通圖,則通過Dijkstra算法找到聲源到接收點間的最優路徑。
假設某深海海底地形如圖9所示,并布設有7個編號分別為A,B,C,D,E,F,G的通信節點,利用RAP模型和圖論理論對其進行仿真估計。
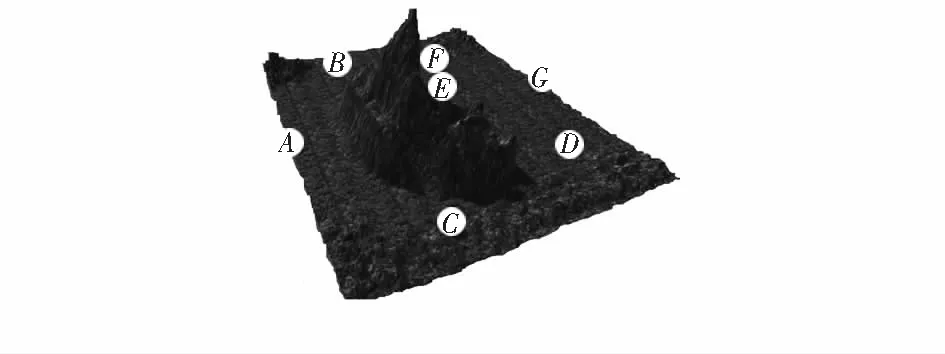
圖9 海底地形與通信節點分布
首先,通過RAP模型找到各點到其余各點的連通系數并與判決系數比較,以此判斷相互之間是否可以實現相通,若相通以箭頭表示。仿真結果如圖10所示,圖中單箭頭方向代表由一端可以通向另一端,雙箭頭方向代表兩端可互相相通。
然后,以通信節點A為起點,通過對該網圖進行深度優先遍歷,得到節點的訪問序列A→B→F→E→G→D→C。由此可知該網圖是連通的。
最后,現已知圖10中給定的網圖是連通的,利用Dijkstra算法求從源點A到終點G的最優路徑,可得到最優路徑為[6]A→C→D→G,即,經由節點C和節點D的這條路徑是所有路徑中效率最高的一條。通過此路徑既可以保證信息傳遞的連通性,又可以保證整個通信過程中能量的損失最小。
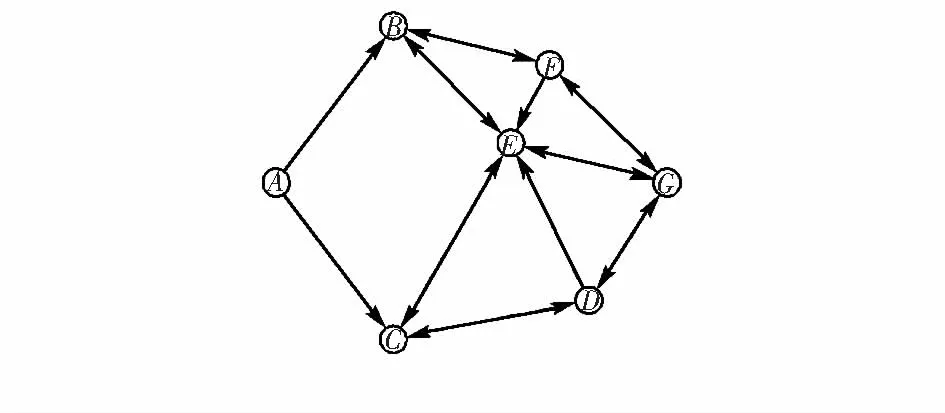
圖10 各通信節點間的相互關系圖
4 結 論
從理論與仿真角度分析證明了深海水聲網的連通性與可靠性。結果表明:該方法可以快速有效地判斷出深海水聲網絡的連通性能。并在網絡連通的前提下,利用Dijkstra算法尋找到一條聲源到接收點之間的最優路徑,這樣就能大大提高深海水聲網絡的可靠性和利用率。
[1] 張宏滔,王忠康.水下通信網絡的發展與應用綜述[C]∥2011船舶電氣及通訊導航技術發展論壇,2011:115-122.
[2] Duan Rui,Yang Kunde,Ma Yuanling,et al.A reliable acoustic path:Physical properties and a source localization method[J].Chinese Physics B,2012,21(12):124-301.
[3] Duan Rui,Yang Kunde,Ma Yuanliang,et al.Moving source localization with a single hydrophone using multipath time delays in the deep ocean[J].J Acoust Soc Am,2014,136(2):159-165.
[4] Baggeroer A B,Scheer E K,Heaney K,et al.Reliable acoustic path and convergence zone bottom interaction in the Philippine Sea 09 Experiment[J].J Acoust Soc Am,2010,128(4):2385-2396.
[5] Lisa M Zurk.Passive detection in the deep water using the reliable acoustic path[J].J Acoust Soc Am,2009,125:2576-2584.
[6] Vincent J Varamo,Bruce Howe.Reliable acoustic path tomography at Aloha cable observatory[J].J Acoust Soc Am,2016,140:3184.
[7] 段樂崢.基于BELLHOP的水聲信道時變模型[J].電子世界,2014(9):105-112.
[8] Jensen F B,Kuperman W A,Porter M B,et al.Computation ocean acoustics[M].[S.l]:Am Inst Physics Press,1994:329-386.
[9] 李 文,李整林,南明星.深海海底山對聲傳播的影響[J].聲學技術,2014,33(S2):100-102.
[10] 吳 躍.數據結構與算法[M].北京:機械工業出版社,2012:137-166.
[11] 胡 暖,魏宗壽.采用DFS策略的進路搜索算法研究[J].鐵路計算機應用,2007,16(9):4-6.
[12] Xu Junfeng,Li Keqiu,Min Geyong.Multi-path division transmission for improving reliability and energy efficiency in underwater acoustic networks[J].Procedia Computer Science,2011,4:8.
Analysis on connectivity of deep-ocean underwater acoustic network based on RAP
MA Xu-zhuo, FANG Er-zheng, XU Hui
(College of Underwater Acoustic Engineering,Harbin Engineering University,Harbin 150001,China)
Reliable acoustic path(RAP)is one of the special physical phenomenon in deep ocean sound propagation.Physical mechanism of RAP is analyzed and RAP is used to calculate distribution of acoustic field.On the basis of deep ocean underwater acoustic network communication nodes,combined with graph theory,simulate connectivity of deep ocean underwater acoustic network in the condition of complex seabed topography.The results show that this method can effectively estimate if deep ocean underwater acoustic network is connected,and can find a optimal path from source to receiver when the network is connected.
deep ocean acoustic network; reliable acoustic path(RAP); transmission loss; connectivity; graph theory; Dijkstra algorithm
10.13873/J.1000—9787(2017)04—0023—04
2016—04—28
TN 915
A
1000—9787(2017)04—0023—04
馬旭卓(1983-),男,博士,講師,從事水聲工程技術研究工作。
猜你喜歡
中學生數理化·七年級數學人教版(2022年6期)2022-06-05 06:50:50
快樂學習報·教育周刊(2022年16期)2022-05-01 21:25:05
中學生數理化·七年級數學人教版(2020年11期)2020-12-14 06:59:52
藝術品鑒證.中國藝術金融(2018年8期)2019-01-14 01:14:28
藝術品鑒證.中國藝術金融(2018年10期)2019-01-08 02:44:26
藝術品鑒證.中國藝術金融(2018年6期)2019-01-08 02:43:04
藝術品鑒證.中國藝術金融(2018年12期)2018-08-26 06:03:48
新聞傳播(2016年10期)2016-09-26 12:14:59
新聞傳播(2015年10期)2015-07-18 11:05:40
交通建設與管理(2015年15期)2015-03-20 15:18:57
