電力巡線無人機機載電磁場檢測系統設計
2017-04-14 05:13:06楊蔚,劉瑋,趙強,杜毅
成都大學學報(自然科學版) 2017年1期
楊 蔚, 劉 瑋, 趙 強, 杜 毅
(四川省電力公司 檢修公司, 四川 成都 610031)
電力巡線無人機機載電磁場檢測系統設計
楊 蔚, 劉 瑋, 趙 強, 杜 毅
(四川省電力公司 檢修公司, 四川 成都 610031)
針對高壓輸電線的電磁場輻射對電力巡線無人機帶來的安全隱患問題,設計了一種機載電磁場檢測系統,能夠檢測出無人機與高壓輸電線在不同距離時的電場和磁場強度.測試結果表明,系統所測得的電磁場強度與無人機和高壓輸電線的距離成線性關系.檢測數據通過無線傳輸到地面控制中心或直接提供給無人機飛控處理單元,便于實現對無人機的安全飛行控制,對無人機在巡線作業時保持安全距離起到了非常重要的作用.
電磁輻射;電力巡線;電磁場檢測
0 引 言
為了保障高壓輸電線路長期穩定運行,作業人員需要定期對高壓輸電設備進行巡檢作業.由于架空輸電線路覆蓋范圍區域廣,穿越區域地形復雜以及自然環境惡劣,作業人員巡檢時,需要親臨高壓鐵塔塔底進行觀測,這將嚴重危及到作業人員的安全[1].近年來,無人機巡檢以其無需作業人員親臨塔底、效率高、無巡檢“盲區”等優勢得到了廣泛應用[2].但是,采用無人機沿高壓輸電線巡檢作業時,高壓電源產生的電場和磁場易對無人機的機載電子設備造成干擾,而不能正常工作,導致無人機發生姿態失衡、定點懸停偏離與漂移、飛行脫離控制以及嚴重時撞擊輸電線路及墜機等事故.針對這一問題,本研究設計了電力巡線無人機機載電磁場檢測系統,通過設計電磁場感測單元檢測電路的電場和磁場強度,測量數據經處理后通過無線傳輸到地面飛控中心或無人機飛控系統,從而引導無人機進行安全巡線作業.
1 系統工作原理
本機載電磁場檢測系統由機載模塊、無線收發模塊和PC機管理軟件3部分組成.機載模塊負責采集高壓輸電線路電場和磁場強度、方向信息,并對數據進行處理,處理的結果傳給無人機飛控.同時,結果還通過無線收發模塊傳給地面端,經過地面端管理軟件處理后,無人機所處電場和磁場強度、方向信息以及離高壓輸電線路的距離提供給無人機操控人員或無人機飛控單元,與此同時這些數據也會顯示在PC機屏幕上.
2 系統硬件設計
機載模塊位于無人機上,包含電磁場感測單元、信號調理單元、控制處理單元和無線發送單元.電磁場感測單元主要通過設計專用的電磁場感測裝置完成對電場和磁場強度的感測.信號調理單元主要完成對傳感器單元感測的信號進行濾波、A/D變換.控制處理單元是機載模塊控制和數據處理的核心.經過采集和處理后的數據通過無線發送單元發送到地面無線接收模塊,機載無線發送單元采用與地面無線收發單元相同的模塊.機載模塊的組成框圖如圖1所示.

圖1 機載模塊的組成框圖
2.1 電場感測單元設計
處于交變電場中的電容器,在其表面會產生感應電荷,從而在電容器的兩極板上形成電壓差,該電壓差能夠反映電場的強度大小[3-4].
本系統的電場傳感器采用平行板電容傳感器作為電場感測元件.由于要采集的高壓線路電場是空間交變電場,因此,除了需要測量電場大小外,還需要測量電場的方向.
系統中,1個立方體裝置上的6個表面上放置電容極板,從而形成3個相互正交放置的電容器來測量3個正交方向上的電場強度,并據此計算出電場的方向.電場感測單元器結構圖如圖2所示.

圖2 電場感測單元結構圖
2.2 磁場感測單元設計
對交變磁場測量方法通常有霍爾效應法、電磁感應法、磁光效應法和磁阻效應法[5].
本系統采用霍爾效應法.置于磁場中的靜止載流導體,當它的電流方向與磁場方向不一致時,在載流導體上垂直于電流和磁場的方向上將產生霍爾電動勢.霍爾電勢的大小與磁場強度成正比.
本研究采用線性霍爾元件作為磁場感測元件.由于高壓線路周圍的磁場為交變磁場,本系統中1個立方體裝置的6個表面上放置霍爾元件,6片霍爾元件采用差動輸出方式,每相對2片靈敏度相同的霍爾元件為1組,一正一反分別貼于正六面體相對的面上,即在探頭的X、Y、Z軸線上對稱分布,與O點等距,輸出信號為單一放大器的2倍,這樣輸出的信號零漂小,同時減少了因測試環境溫度變化所帶來的溫度誤差.此種結構可以得到3個正交方向上的磁場強度,并據此計算出磁場的方向.磁場感測單元結構如圖3所示.

圖3 磁場感測單元結構圖
2.3 控制處理單元設計
控制處理單元主要完成的功能包括:接收傳感器的測量數據,對數據進行處理運算;通過串口將數據運算處理后的數據發送到無線收發單元,并且接收地面PC機的控制指令;具有定期的自檢能力.
本研究選擇意法半導體公司的STM32F103作為控制處理器.STM32F103是基于高性能的ARM Cortex-M4 32-bit RISC內核,工作頻率為68 MHz.
處理器STM32F103具有XX個12-bit A/D轉換器,因此,在本方案中,電磁場檢測裝置采集到的電磁場強度模擬信號直接輸入到STM32F103,由其內部的A/D轉換器進行數字化處理.
處理器STM32F103通過UART異步串行通信接口與無線收發單元進行數據交互.波特率為19.2 K,包含1個起始位和1個停止位,無奇偶校驗.
2.4 無線收發模塊設計
本系統中,機載無線收發單元和地面無線收發模塊均采用AS62-T30無線傳輸模塊,它是一款433 MHz、1 W功率、高穩定性、工業級的無線數傳模塊.模塊采用SX1278主芯片,LORA擴頻傳輸,TTL電平輸出,兼容3.3 V與5 V的I/O口電壓.該模塊采用高效的循環交織糾錯編碼算法,其編碼效率高,糾錯能力強,在突發干擾的情況下,能主動糾正被干擾的數據包,最大連續糾錯64 bit,大大提高了模塊的抗干擾性和傳輸距離,而在沒有采用糾錯算法的情況下,這種出錯的數據包只能被丟棄.LORA擴頻使模塊具有更遠的通信距離.
3 系統軟件設計
系統的電磁場測量工作流程如下:延時開機后系統進行初始化,完成各個模塊電路的自檢,然后處理器開始對測得的表征電磁場強度的電壓信號進行A/D轉換.軟件檢測A/D采樣是否完成,若完成,則由處理器讀取數據,啟動與無線收發單元的串行通信,將數據發送到無線模塊.與此同時,對數據進行分析,根據設定的報警限值判斷是否過限并發出警示信號.處理器采用定時器方式實現A/D轉換、場強過限判斷,程序通過不斷的循環來實現不間斷測量.主程序流程圖如圖4所示.
4 測 試
4.1 模擬測試
在現場測試之前,為滿足實際工程需要,減小系統的測量誤差,保證外部工頻電場與電場傳感器的輸出具有良好的線性度,需要對電場傳感器的線性度進行校正.模擬校正示意圖與實際搭建圖如圖5所示.
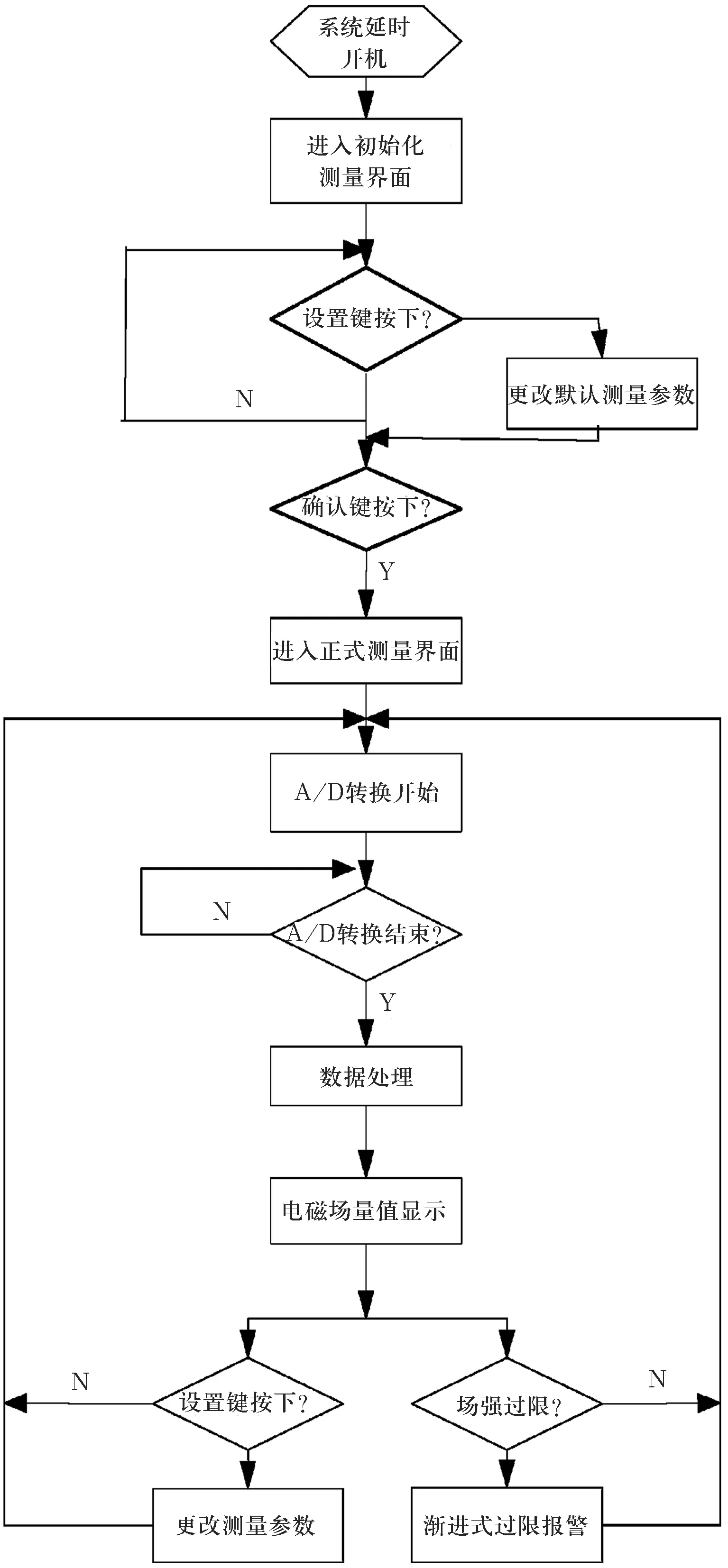
圖4 電磁場測量主程序流程圖

圖5 模擬校正示意圖及實際搭建圖
本校驗系統采用平行板電極的有效邊長為400 mm,極板有效間距離為100 mm,符合國標GB/T 12720-91的要求.由均勻場強公式E=U/d計算出電極間工頻電場的有效值,調節電壓大小使兩平行板電極之間的電場從2.5 kV/m增大到20 kV/m,工頻電場校正系統測試曲線如圖6所示.圖6中,直線是計算的理論值直線,點是實際測試的數據值.

圖6 工頻電場校驗系統測試曲線
從圖6可知,本系統所設計的電場感測裝置的線性度好,可以用于實際環境的測量.
4.2 現場測試
本系統在某500 kV高壓輸電線路進行了現場測試.該段輸電線路的基本參數是:導線為四分裂導線,三角形排列;中相距離地面高度為27 m,邊相距離地面高度為23 m;邊相與中相的水平間距為3 m.測量當天天氣陰云,氣溫為21 ℃,相對濕度為45%.此次測試,在電網公司配合下,綜合利用激光測距技術和衛星定位技術,在高壓線水平面垂直高度5 m到50 m不同水平距離位置,測量無人機的電磁場強度,并觀察無人機是否準確預警.測試的數據如圖7所示.

圖7 測試數據曲線圖
對數據進行處理,并和實際距離對比,如圖8所示.圖8中,曲線a是電場強度映射的距離和實際距離對比,曲線b是磁場強度映射的距離和實際距離對比.

圖8 不同距離測試點電場和磁場強度距離對比
5 結 論
測試結果顯示,電力巡線無人機機載電磁場檢測系統能夠對高壓輸電線路的電磁場輻射強度進行測量,測量數據的變化趨勢能夠反映出無人機與高壓輸電線距離的遠近.當檢測數據超過了所設定的預警閾值時,能夠給出報警.
本電磁場檢測系統應用于無人機高壓電纜巡線作業中,對無人機在巡線作業時保持與高壓輸電線的安全距離起到非常重要的作用.
[1]彭向陽,劉正軍,麥曉明,等.無人機電力線路安全巡檢系統及關鍵技術[J].遙感信息,2015,30(1):51-57.
[2]徐華東.無人機電力巡線智能避障方法研究[D].南京:南京航空航天大學,2014.
[3]汪金剛,林偉,李健,等.電容式交變電場傳感器與工頻電場檢測試驗研究[J].傳感器與微系統,2010,29(9):21-24.
[4]何友,王宏國,路大鑫,等.多傳感器信息融合與應用[M].北京:電子工業出版社,2001.
[5]雪原.智能三維磁場測量儀的研究[D].南京:南京理工大學,2012.
Detecting System Design of UAV Airborne Electromagnetic Field of Power Line Patrol
YANGWei,LIUWei,ZHAOQiang,DUYi
(Overhaul Company, State Grid Sichuan Electric Power Company, Chengdu 610031, China)
Aiming at the safety problems caused by the influence of the electromagnetic field radiation of the high voltage transmission line on power line patrol UAV,the airborne electromagnetic field detecting system is designed.It can detect the intensity of both the electric field and the magnetic field when UAV and the high voltage transmission line are at different distances.The test results show that the intensity of the electric field and the magnetic field measured by the system is in linear relation with the distance between the UAV and the high voltage transmission line.The detecting results are sent to the control center or directly to the UAV flight control unit through wireless transmission,which is conducive to the control of the safe flight of the UAV.This system will play a very important role in helping UAV keep a safe distance during power line patrol.
electromagnetic radiation;power line patrol;detection of electromagnetic field
1004-5422(2017)01-0076-04
2016-12-07.
楊 蔚(1978 — ), 男, 工程師, 從事輸電線路檢修與無人機巡檢技術研究.
TP274+.2
A
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
空間科學學報(2021年6期)2021-03-09 06:20:00
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
石油地球物理勘探(2017年4期)2017-12-18 07:15:09
家庭影院技術(2017年9期)2017-09-26 03:41:45
湖南城市學院學報(自然科學版)(2016年2期)2016-12-01 04:07:07
物探化探計算技術(2015年2期)2015-02-28 17:42:42
