基于雙目橫向會聚模式的機(jī)器人在智能生產(chǎn)中的應(yīng)用
2017-04-15 09:18:58張衡
河南科技 2017年3期
張衡
(廣東理工學(xué)院信息工程系,廣東肇慶 526100)
基于雙目橫向會聚模式的機(jī)器人在智能生產(chǎn)中的應(yīng)用
張衡
(廣東理工學(xué)院信息工程系,廣東肇慶 526100)
工廠現(xiàn)場使用的產(chǎn)用機(jī)器人以醫(yī)療、農(nóng)業(yè)、護(hù)理、生活輔助和辦公室輔助等領(lǐng)域?yàn)閷?shí)現(xiàn)目標(biāo)。基于雙目橫向會聚模式的機(jī)器人在智能生產(chǎn)中的應(yīng)用,不僅體現(xiàn)在傳統(tǒng)機(jī)器人、機(jī)器人汽車制造商、電機(jī)制造商等領(lǐng)域,而且在機(jī)器人的研究、開發(fā)等領(lǐng)域也實(shí)現(xiàn)了新技術(shù)革命。本文在討論雙目橫向會聚模式的基礎(chǔ)上,以采摘機(jī)器人為例具體介紹該算法的實(shí)際應(yīng)用。
機(jī)器人;智能生產(chǎn);雙目橫向會聚
隨著社會的發(fā)展,各行各業(yè)對機(jī)器人各種功能的需求不斷擴(kuò)大,機(jī)器人已經(jīng)滲透到社會生活的各個領(lǐng)域。比如安全方面,SECOM公司最近生產(chǎn)的小型防盜飛行機(jī)器人,未經(jīng)許可的人員、車輛等進(jìn)入公司或商場的車間、倉庫等設(shè)施時機(jī)器人就會在上空盤旋,對可疑人員進(jìn)行抓拍形成圖片,甚至場所內(nèi)的死角、無攝像頭的地方也能進(jìn)行拍攝,并且能夠做到在可疑的車輛或人員臨近時,給出相關(guān)的警告[1,2]。可見機(jī)器人技術(shù)已經(jīng)發(fā)展到了高度智能化階段。其中,雙目橫向會聚模式在機(jī)器人技術(shù)的發(fā)展中起到了很重要的作用。
雙目成像技術(shù)是通過獲取不同圖像的同一場景不同視點(diǎn)來完成識別工作的[3,4]。智能機(jī)器人可以通過該技術(shù)截取視差、角度掃描成像及測距離精度[5,6]。三菱電機(jī)在福山制造所使用基于該技術(shù)的機(jī)器人處理自動組裝生產(chǎn)線,使機(jī)器可以按照固定指向的圖像模型采集相關(guān)信息[7]。這使得公司更好地解決了自動化問題,特別是組裝過程中的難題[8]。同時,也有利于實(shí)施與工程相關(guān)的設(shè)計(jì)。
1 雙目橫向匯聚模式
所謂雙目橫向匯聚模式,是指2個攝像機(jī)的光軸在識別過程中可以會聚的匯聚模式[9]。成像原理如圖1所示。圖1是2個圍繞各自中心旋轉(zhuǎn)的單目系統(tǒng)坐標(biāo)變換而形成的。圖1所給出的是攝像頭俯視的平面,B是鏡頭間的距離,XZ平面的焦點(diǎn)(0,0,Z)是兩光軸的交點(diǎn),顯然交角為θ+θ=2θ。
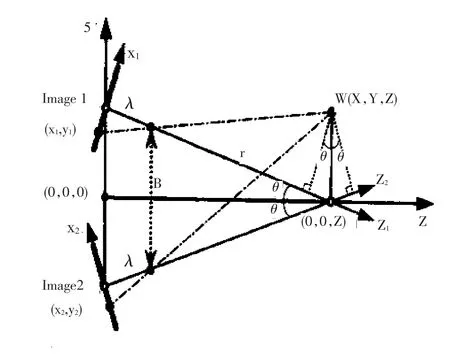
圖1 匯聚雙目成像中視差
現(xiàn)在來看,在已知坐標(biāo)(X1,Y1)和(X2,Y2)的情況下如何求點(diǎn)W(X,Y,Z)。
首先,在2個坐標(biāo)軸、攝像機(jī)的會聚點(diǎn)和攝像機(jī)(其中一個)中心線所共同圍成的三角模型知:

由點(diǎn)W引2條垂線到2攝像機(jī)坐標(biāo),顯然,X軸與這兩條直線的夾角都為θ。由三角形相似規(guī)律得:

式(2)中,r是從其中一個鏡頭中心到其他兩個系統(tǒng)的會聚點(diǎn)的距離。聯(lián)立得:

同時,可以解得sinθ、cosθ及Z=Bcosθ/2sinθ+2X1X2sinθ/d。
這樣,也把物體與像平面之間的距離Z及d聯(lián)系在一起。但是,在求解過程當(dāng)中除了要知道X1、X2的差以外,還要知道X1、X2本身。將r=B/2sinθ代入(2)可得:

綜上所述,在使用雙目橫向會聚模式時,必須根據(jù)三角形算法模型進(jìn)行相應(yīng)的計(jì)算。同時,基線不能極小,以免影響精確度。其次,如果凹陷的表面存在于物體,同樣能造成由于遮擋而出現(xiàn)的點(diǎn),這些點(diǎn)不能同時被拍到。
2 雙目橫向匯聚系統(tǒng)
以上討論了雙目橫向會聚模式,現(xiàn)以栽培系統(tǒng)為例,研究草莓采摘機(jī)器人是如何實(shí)現(xiàn)該功能的。傳統(tǒng)的草莓采摘機(jī)器人不但費(fèi)力,而且效率低。如何使機(jī)器人省時、省力是研究的重點(diǎn)。采摘時可使用雙目橫向匯聚方法進(jìn)行數(shù)據(jù)的收集、整理及栽培技巧的積累。圖2所示是采摘系統(tǒng)的原理圖。
圖2給出了圖像處理時測定草莓大小且只采摘一定大小的草莓。原理可以這樣來描述:首先,通過草莓的成熟度來判斷草莓是否適宜采摘;其次,要判斷可采摘草莓的位置;最后,切斷草莓的果柄。在整個過程中,將采果機(jī)器人手向目標(biāo)位置移動等關(guān)鍵技術(shù)是必不可少的。

圖2 采摘系統(tǒng)的原理圖
基于雙目橫向匯聚模式的機(jī)器人除了在以上草莓采摘過程中得到廣泛應(yīng)用外,還在其他技術(shù)領(lǐng)域起到關(guān)鍵作用,比如日本新型機(jī)器人“ASIMO”。圖3是日本本田開發(fā)出的模擬人形機(jī)器人“ASIMO”,其身長1 300mm,體質(zhì)量48kg。與舊型號“ASIMO”相比,輕了6kg。多個該機(jī)器人可以進(jìn)行協(xié)同工作。“ASIMO”分工接待不同客人,將客人引導(dǎo)到接待室。本田公司開發(fā)出此類機(jī)器人可以適應(yīng)不同的狀況。這些機(jī)器人利用雙目橫向會聚模式綜合多個傳感器可以推斷出周圍狀況和人的動作,然后盡心決策,決定機(jī)器人自身的動作行為。這樣不但機(jī)器人自身的能力得到進(jìn)化,對事物的決策能力也大大提高。

圖3 機(jī)器人“ASIMO”
3 雙目橫向匯聚算法在選擇采摘目標(biāo)過程中的應(yīng)用
在采摘過程中,適宜的時間以及在不破壞植物的前提下從頭到根采摘、收到托盤一整個過程,是機(jī)器人目標(biāo)的確定、辨別采摘的重點(diǎn)內(nèi)容。首先,確定采摘機(jī)器人的裝置,如圖4所示是機(jī)器的中心部分,由5個LED照明燈、3個CCD攝像頭、1個機(jī)器人手、1個驅(qū)動機(jī)器控制器組成。比如,在采摘葡萄的過程中,在判斷葡萄是否適宜采摘時先使用雙目會聚算法判斷其是否成熟,然后再判斷葡萄的位置,最后執(zhí)行切斷操作,并用機(jī)器人手拿住葡萄。其中,將機(jī)器人的手臂向目標(biāo)位置移動是關(guān)鍵技術(shù)。

圖4 采摘機(jī)器人中心裝置
機(jī)器在工作時還要考慮信息的正向傳遞問題。
①隱含層中第i個神經(jīng)元的輸出為:

②輸出層第k個神經(jīng)元的輸出為:

③定義誤差函數(shù)為:

以上算法可以保證權(quán)值收斂到一個解,但很可能還有一個局部極小解,并不能保證所求的解就是誤差超平面的全局最小解。算法本身采用的是梯度下降法,訓(xùn)練逐漸達(dá)到誤差的最小值,是從某一起始點(diǎn)沿誤差函數(shù)的斜面。
4 結(jié)論
本文對“雙目橫向會聚模式”的算法在機(jī)器人智能生產(chǎn)中的應(yīng)用進(jìn)行了詳實(shí)的闡述。并以采摘機(jī)器人為例,介紹了其如何完成采摘工作。未來的機(jī)器人產(chǎn)業(yè)將在以下幾個方面得到更深入的發(fā)展:①提高數(shù)倍甚至數(shù)十倍的生產(chǎn)效率;②在后期工程中得到推廣和擴(kuò)大使用;③隨著圖像識別與顯示設(shè)備技術(shù)的進(jìn)步,訪問信息在機(jī)器人技術(shù)方面的改進(jìn)。
而且,今后在圖片的獲取方面,該算法的應(yīng)用更為廣泛。如AR技術(shù)就是利用該算法將現(xiàn)場實(shí)物及擴(kuò)張現(xiàn)實(shí)感表達(dá)出來。比如圖像假設(shè)不是三維的,就無法表達(dá)出完整信息,那么作業(yè)人員要花費(fèi)很多時間學(xué)習(xí)顯示器的使用方法。即使沒有圖片的信息,雙目橫向會聚模式也可以被采用,所獲取的是聲音系統(tǒng)的聲音信息,原理基本相同。再比如工廠配管過程中,需要統(tǒng)計(jì)出在船上被組裝的管材的龐大數(shù)量,并在現(xiàn)場進(jìn)行裝配。這一過程也可以用該算法輔助實(shí)現(xiàn)。由此可見,雙目橫向會聚模式算法已經(jīng)是機(jī)器人領(lǐng)域應(yīng)用極廣的技術(shù),并有很廣闊的發(fā)展前景。
[1]薩師煊,王珊.數(shù)據(jù)庫系統(tǒng)概論[M].北京:高等教育出版社,1991.
[2]王珊.數(shù)據(jù)庫和數(shù)據(jù)庫管理系統(tǒng)[M].北京:電子工業(yè)出版社,1995.
[3]邵長勉.動態(tài)環(huán)境下移動機(jī)器人定位及地圖創(chuàng)建[D].南京:南京郵電大學(xué),2014.
[4]陳建科.海洋平臺鉆機(jī)自動抓管吊機(jī)的動力學(xué)分析[D].西安:西安石油大學(xué),2014.
[5]逄淑偉.沈陽機(jī)器人產(chǎn)業(yè)發(fā)展模式研究[D].沈陽:沈陽大學(xué),2015.
[6]王元.數(shù)學(xué)大辭典[M].北京:科學(xué)出版社,2010.
[7]中國大百科全書總編輯委員會《經(jīng)濟(jì)學(xué)》編輯委員會,中國大百科全書出版社編輯部編.中國大百科全書[M].北京:中國大百科全書出版社,1988.
[8]高陽.微網(wǎng)短期負(fù)荷預(yù)測“機(jī)理+辨識”策略中的白噪聲分離[D].天津:天津大學(xué),2009.
[9]張程.5-DOF上肢康復(fù)機(jī)器人AHP-模糊綜合康復(fù)評價(jià)方法研究[D].沈陽:東北大學(xué),2012.
Application of Robot Based on Binocular Horizontal Convergence Mode in Intelligent Production
Zhang Heng
(Department of Information Engineering,Guangdong Polytechnic College,Zhaoqing Guangdong 526100)
The use of robots in the field of the factory to achieve the goal of medical,agricultural,nursing,life sup?port,office assistance and other fields.The application of robot based on binocular lateral convergence mode in intel?ligent production,not only reflect in the traditional robot,the robot car manufacturers,motor manufacturers and other fields,but also realize a new technological revolution in the field of robot research and development.In this paper, based on the discussion of binocular convergence pattern,the practical application of the algorithm was introduced.
robot;intelligent production;binocular horizontal convergence
TP242
A
1003-5168(2017)02-0032-03
2017-01-13
張衡(1987-),男,碩士,助教,研究方向:計(jì)算機(jī)科學(xué)與技術(shù)方面教學(xué)。