一種新型船模水動(dòng)力性能測(cè)試裝置研究
2017-04-17 08:36:15涂海文謝文雄孫江龍
艦船科學(xué)技術(shù) 2017年2期
關(guān)鍵詞:船舶
陽(yáng) 航,涂海文,謝文雄,孫江龍,
(1. 華中科技大學(xué) 船舶與海洋工程學(xué)院,湖北 武漢 430074;2. 船舶和海洋工程水動(dòng)力湖北省重點(diǎn)實(shí)驗(yàn)室,湖北 武漢 430074;3. 高新船舶與深海開(kāi)發(fā)裝備協(xié)同創(chuàng)新中心,上海 200240)
一種新型船模水動(dòng)力性能測(cè)試裝置研究
陽(yáng) 航1,涂海文1,謝文雄1,孫江龍1,2,3
(1. 華中科技大學(xué) 船舶與海洋工程學(xué)院,湖北 武漢 430074;2. 船舶和海洋工程水動(dòng)力湖北省重點(diǎn)實(shí)驗(yàn)室,湖北 武漢 430074;3. 高新船舶與深海開(kāi)發(fā)裝備協(xié)同創(chuàng)新中心,上海 200240)
目前,國(guó)內(nèi)外的船模水動(dòng)力性能測(cè)試裝置均為平面運(yùn)動(dòng)機(jī)構(gòu),使得船舶水動(dòng)力導(dǎo)數(shù)的測(cè)量范圍有限,而一種新型船模水動(dòng)力性能測(cè)試裝置,即六自由度船模水動(dòng)力性能測(cè)試裝置可以擴(kuò)大這一測(cè)量范圍。從六自由度平臺(tái)的工作原理,六分力天平量程的確定和測(cè)試裝置總體設(shè)計(jì) 3 個(gè)方面來(lái)具體研究和設(shè)計(jì)六自由度船模水動(dòng)力性能測(cè)試裝置。首先具體介紹六自由度平臺(tái)的工作原理,即平臺(tái) 6 根運(yùn)動(dòng)桿的運(yùn)動(dòng)與船舶六自由度運(yùn)動(dòng)的對(duì)應(yīng)關(guān)系;然后建立船舶六自由度運(yùn)動(dòng)所受力和力矩的初步計(jì)算公式,以國(guó)內(nèi)外平面運(yùn)動(dòng)機(jī)構(gòu)的具體技術(shù)性能指標(biāo)為依據(jù),確定試驗(yàn)裝置中的六分力天平的量程;最后確定測(cè)驗(yàn)裝置的整體設(shè)計(jì),設(shè)計(jì)出現(xiàn)有船池拖車(chē)平臺(tái)的具體形狀與尺寸。以此為依據(jù),綜合考慮拖車(chē)平臺(tái)的受力情況及拖車(chē)架和六自由度平臺(tái)的安裝方式,確定拖車(chē)架的具體結(jié)構(gòu)形式與尺寸大小,得到三維示意圖、二維安裝圖與尺寸圖,進(jìn)行結(jié)構(gòu)強(qiáng)度分析。
六自由度;測(cè)試裝置;六分力天平
0 引 言
六自由度運(yùn)動(dòng)機(jī)構(gòu)的結(jié)構(gòu)形式由 Stewart.D[1]于1965 年提出,洪鳴等[2]對(duì)六自由度運(yùn)動(dòng)平臺(tái)的控制系統(tǒng)進(jìn)行了詳細(xì)分析,蘇玉鑫等[3]對(duì)六自由度 Stewart 平臺(tái)的運(yùn)動(dòng)精度進(jìn)行了分析,王勇亮等[4]對(duì)位移傳感器在六自由度運(yùn)動(dòng)平臺(tái)中的應(yīng)用進(jìn)行了介紹,何景峰等[5]分析了六自由度平臺(tái)的沖擊響應(yīng),榮輝等[6]對(duì)六自由度平臺(tái)的靈敏度進(jìn)行了分析,楊達(dá)毅和陳麗敏[7]利用SolidWorks 軟件對(duì)六自由度液壓平臺(tái)進(jìn)行運(yùn)動(dòng)仿真。經(jīng)過(guò)半個(gè)世紀(jì)的發(fā)展,六自由度運(yùn)動(dòng)機(jī)構(gòu)本身的技術(shù)已經(jīng)較為成熟,但其運(yùn)用范圍卻有限。僅有飛行模擬器和六自由度機(jī)器人的實(shí)用度較大。而在船舶水池試驗(yàn)裝置領(lǐng)域,國(guó)內(nèi)外的研究主要集中在平面運(yùn)動(dòng)機(jī)構(gòu)上,對(duì)六自由度運(yùn)動(dòng)機(jī)構(gòu)卻鮮有研究,從而限制了船舶水池試驗(yàn)的范圍。將六自由度運(yùn)動(dòng)機(jī)構(gòu)和船舶的六自由度約束運(yùn)動(dòng)相結(jié)合,可以得到一種六自由度船舶水池試驗(yàn)裝置,對(duì)船舶領(lǐng)域科研的發(fā)展具有重要意義。
1 六自由度平臺(tái)的工作原理
六自由度平臺(tái)的功能具體體現(xiàn)在平臺(tái)運(yùn)動(dòng)平臺(tái) 6個(gè)自由度的運(yùn)動(dòng)上,該運(yùn)動(dòng)由 6 根運(yùn)動(dòng)桿的線性運(yùn)動(dòng)復(fù)合而成,包括 3 個(gè)位移和 3 個(gè)運(yùn)動(dòng)。這 6 個(gè)自由度的運(yùn)動(dòng)與船舶 6 個(gè)自由度的運(yùn)動(dòng),即橫搖、縱搖、首搖、橫蕩、縱蕩和垂蕩、從本質(zhì)上來(lái)說(shuō)是一樣的。總的來(lái)說(shuō),要想讓試驗(yàn)裝置帶動(dòng)船模按照預(yù)定的橫搖角、縱搖角、首搖角、橫蕩位移、縱蕩位移和垂蕩位移值來(lái)運(yùn)動(dòng),就必須給六自由度平臺(tái)所有運(yùn)動(dòng)桿以運(yùn)動(dòng)指令,即輸入 6 個(gè)線性位移量,經(jīng)過(guò)轉(zhuǎn)換后輸出為船舶的橫搖、縱搖、首搖、橫蕩、縱蕩和垂蕩。本小節(jié)所論述的六自由度平臺(tái)的工作原理正是 6 個(gè)線性位移量和橫搖、縱搖、首搖、橫蕩、縱蕩及垂蕩的轉(zhuǎn)換關(guān)系。為方便起見(jiàn),將船舶及六自由度平臺(tái)的 6 個(gè)運(yùn)動(dòng)量設(shè)為縱向位移 x,橫向位移 y,垂向位移 z,橫搖角 φ,縱搖角 θ 和首搖角 ψ。
考慮到六自由度平臺(tái)結(jié)構(gòu)的空間性,應(yīng)該建立空間直角坐標(biāo)系。又由于六自由度平臺(tái)同時(shí)擁有固定平面和運(yùn)動(dòng)平面,所以應(yīng)該建立 2 個(gè)空間直角坐標(biāo)系,即固定坐標(biāo)系和運(yùn)動(dòng)坐標(biāo)系,分別設(shè)為 XBYBZB和XPYPZP。設(shè)固定平臺(tái)的 6 個(gè)連接點(diǎn)為 Bi(i = 1,2,3,4,5,6),運(yùn)動(dòng)平臺(tái)的連接點(diǎn)為 Pi(i = 1,2,3,4,5,6)。所建立的六自由度平臺(tái)數(shù)學(xué)模型如圖 1 所示。
2 個(gè)空間直角坐標(biāo)系的坐標(biāo)原點(diǎn)分別取為六自由度平臺(tái)固定平面和運(yùn)動(dòng)平面的形心。這樣,在知道六自由度平臺(tái)具體結(jié)構(gòu)尺寸的情況下,各連接點(diǎn)在各自坐標(biāo)系下的坐標(biāo)已知。將固定平面連接點(diǎn) Bi在固定坐標(biāo)系下的坐標(biāo)表示為(Bix,Biy,0);將運(yùn)動(dòng)平面連接點(diǎn) Pi在運(yùn)動(dòng)坐標(biāo)系下的坐標(biāo)表示為(Pix,Piy,0)(i = 1,2,3,4,5,6)。顯然,運(yùn)動(dòng)坐標(biāo)系的原點(diǎn) OP相對(duì)于固定坐標(biāo)系的坐標(biāo)即為(x,y,z)。令向量
運(yùn)動(dòng)坐標(biāo)系到固定坐標(biāo)系的坐標(biāo)轉(zhuǎn)換矩陣[8]:
則運(yùn)動(dòng)平面的連接點(diǎn) Pi相對(duì)于固定坐標(biāo)系的坐標(biāo)可表示為:
將方程(2)和方程(4)代入方程(1)中,可得:那么六自由度平臺(tái)第 i 根運(yùn)動(dòng)桿的長(zhǎng)度:
上述的數(shù)學(xué)推導(dǎo)實(shí)際上是對(duì)六自由度平臺(tái)的運(yùn)動(dòng)學(xué)反解,即已知六自由度平臺(tái)運(yùn)動(dòng)平面的 6 個(gè)運(yùn)動(dòng)量,求解六自由度平臺(tái) 6 根運(yùn)動(dòng)桿桿長(zhǎng)的變化。方程(6)建立了六自由度平臺(tái) 6 根運(yùn)動(dòng)桿的運(yùn)動(dòng)與船舶 6 個(gè)自由度運(yùn)動(dòng)的對(duì)應(yīng)關(guān)系。而在試驗(yàn)裝置中則具體表現(xiàn)為,為了模擬試驗(yàn)船模的一個(gè)定量的六自由度運(yùn)動(dòng),將已知的船模縱向位移 x,橫向位移 y,垂向位移 z,橫搖角 φ,縱搖角 θ 和首搖角 ψ 代入方程(6)即可求出六自由度平臺(tái)各運(yùn)動(dòng)桿的桿長(zhǎng)變化,將桿長(zhǎng)的變化值作為指令傳輸給六自由度平臺(tái),六自由度平臺(tái)便能帶動(dòng)試驗(yàn)船模做相應(yīng)的六自由度運(yùn)動(dòng),具體的指令傳輸程序?qū)⒃谝院笞錾钊胙芯俊6紤]到六自由度平臺(tái)本身的運(yùn)動(dòng)精度有限,可以在六自由度平臺(tái)上加裝位移和轉(zhuǎn)動(dòng)傳感器,將實(shí)際的 6 個(gè)運(yùn)動(dòng)量反饋給控制系統(tǒng)。
2 六分力天平量程的確定
六分力天平又叫做六分力傳感器,美國(guó)的 P.CWatsno 于 1975 年設(shè)計(jì)了一種擁有 3 個(gè)垂直筋結(jié)構(gòu)的六分力傳感器[9]。六分力天平在試驗(yàn)裝置中所起到的作用實(shí)際上是測(cè)量試驗(yàn)船模在水池作六自由度運(yùn)動(dòng)的過(guò)程中所受的 3 個(gè)力和 3 個(gè)力矩,將測(cè)量值作為已知量代入相關(guān)公式求解水動(dòng)力導(dǎo)數(shù)。要想確定六分力天平的量程,必須估算出試驗(yàn)船模在作六自由度運(yùn)動(dòng)過(guò)程中所受到的力和力矩的最大值。船模在作六自由度運(yùn)動(dòng)時(shí),影響其所受力和力矩大小的因素有很多,如船模自身的結(jié)構(gòu)形狀、船模的運(yùn)動(dòng)參數(shù)、船模的附加質(zhì)量和附加慣性矩、波浪的影響及耦合影響等等。按照MMG 分離建模的基本思想,列出船模作六自由度運(yùn)動(dòng)過(guò)程中的運(yùn)動(dòng)方程[10]:
式中:上標(biāo) X,Y,Z,K,M,N 分別為船模所受縱向力、橫向力、垂向力、橫搖力矩、縱搖力矩和首搖力矩;下標(biāo) H,P,R,W 分別表示裸船體、螺旋槳、舵和波浪;m 為試驗(yàn)船模的質(zhì)量;xG為船模重心的坐標(biāo)值;mx,my,mz為船模在 3 個(gè)位移方向上的附加質(zhì)量;u,v,w 為船模在 3 個(gè)位移方向上的速度;,,為船模在 3 個(gè)位移方向上的加速度;p,q,r 為船模在 3 個(gè)旋轉(zhuǎn)方向上的角速度;,,為船模在 3 個(gè)旋轉(zhuǎn)方向上的角加速度;Ix、Iy、Iz為船模對(duì) 3個(gè)坐標(biāo)軸的面積慣性矩,Jx,Jy,Jz為相應(yīng)的附加慣性矩。
由式(1)~式(6)可知,在已知試驗(yàn)船模具體尺寸、質(zhì)量、重心坐標(biāo)和各運(yùn)動(dòng)參數(shù)的條件下,可以估算出其作 6 自由度運(yùn)動(dòng)所受力和力矩。而為了估算這些力和力矩的最大值,方程右邊所有已知參數(shù)都應(yīng)該選取最大值。以 36 m 快艇為例,其寬度為 7.3 m,吃水為 1.28 m,型深為 3.65 m,重心橫向坐標(biāo)值為1.2 m,排水量為 90 t。則快艇對(duì)試驗(yàn)船模的尺度比為9,試驗(yàn)船模的質(zhì)量 m = 123 kg,重心坐標(biāo) xG= 0.2 m。為了計(jì)算方便,將快艇的艇體近似作為長(zhǎng)方體來(lái)看待,利用相關(guān)公式估算出試驗(yàn)船模慣性矩 Ix= 0.71 m4,Iy= 17.3 m4,Iz= 0.18 m4。據(jù)經(jīng)驗(yàn)公式, mx= 18.45 kg,my= 147.6 kg,mz= 147.6 kg,Jx= 0.35 Ix,Jy= 2 Iy,Jz= Iz。
接下來(lái)確定試驗(yàn)船模的最大運(yùn)動(dòng)參數(shù),即列出六自由度平臺(tái)的具體運(yùn)動(dòng)性能指標(biāo)。由于國(guó)內(nèi)外大型船舶水池所采用的運(yùn)動(dòng)裝置大都為平面運(yùn)動(dòng)機(jī)構(gòu),考慮到采用這 2 種不同運(yùn)動(dòng)機(jī)構(gòu)的試驗(yàn)裝置所做的船模約束實(shí)驗(yàn)有很多是一樣的,所以對(duì)六自由度平臺(tái)運(yùn)動(dòng)性能指標(biāo)的確定可以參考國(guó)內(nèi)外平面運(yùn)動(dòng)機(jī)構(gòu)。表 1 列出美國(guó) DTMB 等 4 種平面運(yùn)動(dòng)機(jī)構(gòu)的技術(shù)性能指標(biāo)。
以表 1 為參考依據(jù),同時(shí)考慮到試驗(yàn)裝置應(yīng)該同時(shí)滿足教學(xué)和科研試驗(yàn)的要求,列出六自由度平臺(tái)的具體運(yùn)動(dòng)性能指標(biāo)。其中 6 個(gè)位移量除參考國(guó)內(nèi)外平面運(yùn)動(dòng)機(jī)構(gòu)外,還考慮到為滿足教學(xué)與科研要求而將運(yùn)動(dòng)形式擴(kuò)大到非線性運(yùn)動(dòng),振蕩圓頻率取經(jīng)驗(yàn)值,(角)速度和(角)加速度由位移量和振蕩圓頻率求得(位移 e = Acosht(角)速度 f = -Ahsinht(角)加速度 g = -Ah2cosht)。如表 2 所示(為了表示方便表格里的 e 和 f 值顯示的是峰值變化)。
將所有已知參數(shù)的最大值代入到方程(7)到方程(12)中,得到計(jì)算結(jié)果 X = 10.1 N,Y = 198.6 N,Z= 149.8 N,K = 2.3 N·m,M = 12.8 N·m,N = 36.2 N·m。即可基本確定六分力天平的量程。

表 1 國(guó)內(nèi)外平面運(yùn)動(dòng)機(jī)構(gòu)技術(shù)性能指標(biāo)Tab. 1 The technical performance of two-DOF platform at home and abroad
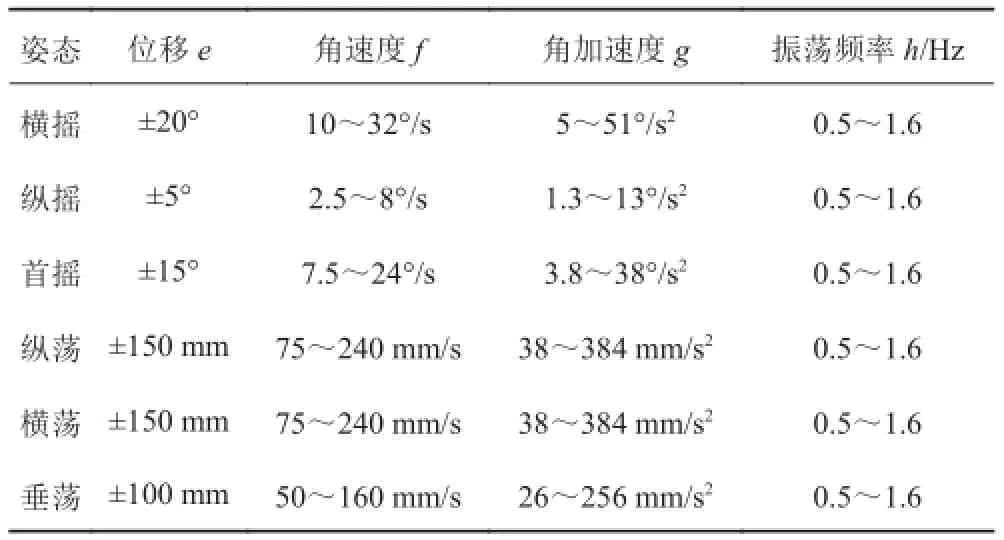
表 2 六自由度平臺(tái)運(yùn)動(dòng)性能指標(biāo)Tab. 2 The sports performance of six-DOF platform
3 測(cè)試裝置的總體設(shè)計(jì)
華中科技大學(xué)船舶與海洋工程學(xué)院船模。船模試驗(yàn)水池長(zhǎng) 175 m,寬 6 m,水深 4 m。以其為參考依據(jù),設(shè)計(jì)出現(xiàn)有拖車(chē)平臺(tái)的實(shí)際形狀與尺寸,如圖 2所示。由于 2 根橫梁的形狀較為細(xì)長(zhǎng),給尺寸的標(biāo)注帶來(lái)不便,所以畫(huà)出橫梁的局部視圖,如圖 3 所示。由于設(shè)計(jì)的拖車(chē)架是直接與 2 根橫梁相連的,所以這對(duì)拖車(chē)架具體尺寸的確定具有重要意義。每根橫梁的側(cè)面都有 7 組定位孔,用于固定拖車(chē)架。
拖車(chē)平臺(tái)本身比較狹長(zhǎng),且離水面的高度有限,即安裝空間比較小。這就決定了六自由度平臺(tái)應(yīng)該從拖車(chē)架下面與拖車(chē)架連接,船模再與六自由度平臺(tái)連接。而為了使拖車(chē)架和拖車(chē)架平臺(tái)緊密連接,結(jié)合現(xiàn)有拖車(chē)平臺(tái)的使用經(jīng)驗(yàn),應(yīng)該讓拖車(chē)架從平臺(tái)上部扣住 2 根橫梁。由此,新設(shè)計(jì)的拖車(chē)架要有 2 個(gè)接觸面,同時(shí)與橫梁的上面和下面固定。
從安裝的可行性出發(fā),將拖車(chē)架分為上下 2 個(gè)部分。上半部分的設(shè)計(jì)較為簡(jiǎn)單,參考現(xiàn)有拖車(chē)架的設(shè)計(jì),上部分的形狀應(yīng)該為半工字型鋼板。由于拖車(chē)架上半部分要與橫梁一起承受來(lái)自拖車(chē)架下半部分與六自由度平臺(tái)及試驗(yàn)船模的力和力矩,所以鋼板應(yīng)該具有一定的厚度和相當(dāng)?shù)拈L(zhǎng)度,其接觸面通過(guò)螺栓與橫梁固定,兩側(cè)面通過(guò)螺釘固定,如圖 4 所示。而拖車(chē)架的下半部分則要同時(shí)與橫梁,拖車(chē)架上半部分和六自由度平臺(tái)連接。
首先,為了讓拖車(chē)架下半部分與橫梁緊密連接,下半部分也應(yīng)該包含一個(gè)半工字型鋼板。為了方便與六自由度平臺(tái)的連接,鋼板也應(yīng)該具有一定的厚度,而長(zhǎng)度必須與上半部分一致。受到空間限制,拖車(chē)架上下 2 部分只能在 2 根橫梁中間進(jìn)行連接,為了保證連接精度與連接強(qiáng)度,宜采用面接觸,同時(shí)為了限制拖車(chē)架的總重量,保證橫梁的結(jié)構(gòu)強(qiáng)度,可以將接觸面分為 2 段。
而為了讓接觸面與拖車(chē)架下半部分通過(guò)螺栓連接成為一個(gè)整體,可以采用箱型結(jié)構(gòu),將其焊接在下半部分的半工字型鋼板上。為更好地承受來(lái)自各個(gè)方向的力和力矩,箱型結(jié)構(gòu)的橫截面采用倒梯形;為了便于安裝,箱型結(jié)構(gòu)在橫梁長(zhǎng)度方向上要有大開(kāi)口;為了保證箱型結(jié)構(gòu)的穩(wěn)定性,可以在其內(nèi)部加裝固定肋板。拖車(chē)架下半部分兩側(cè)面通過(guò)螺釘與橫梁連接。
最后,受到空間限制,六自由度平臺(tái)只能通過(guò)吊裝從拖車(chē)架平臺(tái)靠近水池的一側(cè)與拖車(chē)架下半部分連接,為了便于安裝,在下半部分的底部鋼板上橫向開(kāi)出一個(gè)較深的倒梯形鍵槽,考慮到安裝時(shí)的定位精度,鍵槽的長(zhǎng)度小于鋼板的寬度,同時(shí)通過(guò)螺栓固定,如圖 5 所示。六自由度平臺(tái)與試驗(yàn)船舶的裝配方式則可以參照現(xiàn)有拖車(chē)架平臺(tái)的連接方案,具體情況由船模的種類(lèi)和大小決定,兩者之間的連接部分用于安裝六分力天平和相關(guān)傳感器。整個(gè)測(cè)試裝置的二維示意圖如圖 6 所示,三維示意圖如圖 7 所示。
整個(gè)測(cè)試裝置中拖車(chē)架上半部分和 2 根橫梁是主要受力部分,為了計(jì)算方便,認(rèn)為兩部分在長(zhǎng)度方向上的受力是均勻的。均布載荷包括拖車(chē)架自身重量和附加載荷,鋼材的密度為 7.85 g/cm3,附加載荷定為 500 kg。容易算出拖車(chē)架上半部分的均布載荷為 6.08 kN·m,下半部分的均布載荷為 3.04 kN·m。用 Ansys 軟件對(duì)拖車(chē)架上半部分和橫梁進(jìn)行建模分析。圖 8 和圖 9 分別為拖車(chē)架上半部分和橫梁的受力云圖。
從圖中可以看出拖車(chē)架上半部分與橫梁所受最大應(yīng)力分別為 2.07 MPa 和 74.8 MPa,分別小于 195 MPa和 290 MPa 的屈服極限。通過(guò) Ansys 軟件分析,可以得出結(jié)論:設(shè)計(jì)的測(cè)試裝置在結(jié)構(gòu)強(qiáng)度方面是滿足要求的。由此制造出六自由度船模水動(dòng)力性能測(cè)試裝置的實(shí)物。圖 10 為整個(gè)測(cè)試裝置的實(shí)物圖。
4 結(jié) 語(yǔ)
本文對(duì)一種新型船模水動(dòng)力性能測(cè)試裝置進(jìn)行了系統(tǒng)研究,構(gòu)建了測(cè)試裝置的基本框架,對(duì)其中的 3個(gè)重要組成部分,即六自由度平臺(tái),六分力天平與拖車(chē)架進(jìn)行了一定深度設(shè)計(jì)、分析與探討。這種新型船模水動(dòng)力性能測(cè)試裝置將有效地提高船舶水動(dòng)力導(dǎo)數(shù)的測(cè)量范圍,對(duì)船舶水動(dòng)力導(dǎo)數(shù)相關(guān)領(lǐng)域的科學(xué)研究將起到積極的推動(dòng)作用。
[ 1 ]STEWART D. A platform with six degrees of freedom[J]. Proceedings of the Institution of Mechanical Engineers, 1965, 180(1): 371-386.
[ 2 ]洪鳴, 劉相波, 于魁龍. 六自由度運(yùn)動(dòng)平臺(tái)控制系統(tǒng)[J]. 兵工學(xué)報(bào)(坦克裝甲車(chē)與發(fā)動(dòng)機(jī)分冊(cè)), 1996(1): 13-18. HONG Ming, LIU Xiang-bo, YU Kui-long. The control system of six -DOF motion platform[J]. Industry and Technology (Tanks, Armored Vehicles with Engine Volumes), 1996(1): 13-18.
[ 3 ]蘇玉鑫, 段寶巖. 六自由度 Stewart 平臺(tái)運(yùn)動(dòng)精度分析[J]. 西安電子科技大學(xué)學(xué)報(bào)(自然科學(xué)版), 2000, 27(4): 401-403, 413. SU Yu-xin, DUAN Bao-yan. The kinematics accuracy analysis of six-DOF Stewart[J]. Journal of Xidian University, 2000, 27(4): 401-403, 413.
[ 4 ]王勇亮, 齊麗君, 梁建民. 位移傳感器在六自由度運(yùn)動(dòng)平臺(tái)中的應(yīng)用[J]. 傳感器技術(shù), 2003, 22(4): 49-50. WANG Yong-liang, QI Li-jun, LIANG Jian-min. Application of displacement sensor in 6 DOF motion platform[J]. Journal of Transducer Technology, 2003, 22(4): 49-50.
[ 5 ]何景峰, 韓俊偉. 六自由度運(yùn)動(dòng)平臺(tái)沖擊響應(yīng)分析[J]. 哈爾濱工業(yè)大學(xué)學(xué)報(bào), 2005, 37(10): 1391-1393. HE Jing-feng, HAN Jun-wei. Shock response analysis of 6-DOF parallel motion platform[J]. Journal of Harbin Institute of Technology, 2005, 37(10): 1391-1393.
[ 6 ]榮輝, 范培卿, 丁洪生. 六自由度并聯(lián)平臺(tái)的靈敏度分析與參數(shù)優(yōu)化[J]. 機(jī)械設(shè)計(jì)與研究, 2007, 23(1): 34-36. RONG Hui, FAN Pei-qing, DING Hong-sheng. Sensitivity analysis and parameters optimization for six degree-of-freedom parallel platform[J]. Machine design and research, 2007, 23(1): 34-36.
[ 7 ]楊達(dá)毅, 陳麗敏. 基于 SolidWorks 的六自由度液壓平臺(tái)運(yùn)動(dòng)仿真[J]. 機(jī)床與液壓, 2008, 36(9): 127-129, 150. YANG Da-yi, CHEN Li-min. Motion simulation of 6-DOF hydraulic servo platform based on SolidWorks[J]. Machine Tool & Hydraulics, 2008, 36(9): 127-129, 150.
[ 8 ]楊鵬. 船舶六自由度運(yùn)動(dòng)模擬臺(tái)及其控制方法研究[D]. 哈爾濱: 哈爾濱工程大學(xué), 2008. YANG Peng. Research of ship six degrees of freedom motion simulation platform and its control method[D]. Harbin: Harbin Engineering University, 2008.
[ 9 ]高飛. 一種六分力傳感器的數(shù)值計(jì)算與分析[D]. 武漢: 武漢理工大學(xué), 2006. GAO Fei. The numerical calculation and analysis on six-force sensors[D]. Wuhan: Wuhan University of Technology, 2006.
[10]張秀鳳, 尹勇, 金一丞. 規(guī)則波中船舶運(yùn)動(dòng)六自由度數(shù)學(xué)模型[J]. 交通運(yùn)輸工程學(xué)報(bào), 2007, 7(3): 40-43. ZHANG Xiu-feng, YIN Yong, JIN Yi-cheng. Ship motion mathematical model with six degrees of freedom in regular wave[J]. Journal of Traffic and Transportation Engineering, 2007, 7(3): 40-43.
A new hydrodynamic testing device of model ship
YANG Hang1, TU Hai-wen1, XIE Wen-xiong1, SUN Jiang-long1,2,3
(1. School of Naval Architecture and Ocean Engineering (HUST), Wuhan 430074, China; 2. Hubei Key Laboratory of Naval Architecture and Ocean Engineering Hydrodynamics (HUST), Wuhan 430074, China; 3. Collaboration Innovation Center for Advanced Ship and Deep-Sea Exploration (CISSE), Shanghai 200240, China)
Nowadays, all hydrodynamic testing devices of model ship are planar motion mechanism, thus limiting the measuring range of ship hydrodynamics, while a new hydrodynamic testing device of model ship, the six-DOF hydrodynamic testing device can expand it. It is introduced in three ways: the works of six-DOF platform, the method for determining the range of six-component balance, the total design. Firstly, the works of six degrees of freedom platform is introduced in detail,. that the correspondence between the movement of the six sports bars on the platform and the six freedom movement of a ship. Then establishing preliminary equations to calculate the forces and moments of the six freedom movement, and determining the range of six-component balance in the experiment device on the basis of specific technical performance of the planar motion mechanism at home and abroad. Finally, the overall structure of the experiment device is determined and the shape and size of the existing ship pool trailer platform are designed. On this basis, the specific structure and size of the trailer frame, the three-dimensional schematic diagram, two-dimensional installation diagram and size diagram can be determined, considering forces of the trailer platform and installation of the trailer platform and six degrees of freedom platform, and do structural strength analysis.
six DOF;testing device;six-component balance
U661.1
A
1672 - 7619(2017)02 - 0031 - 06
10.3404/j.issn.1672 - 7619.2017.002.006
2016 - 02 - 29;
2016 - 04 - 20
國(guó)家自然科學(xué)基金資助項(xiàng)目(51474109)
陽(yáng)航(1994 - ),男,碩士研究生,研究方向?yàn)榇八畡?dòng)力性能。
猜你喜歡
艦船科學(xué)技術(shù)(2022年14期)2022-09-22 03:08:26
艦船科學(xué)技術(shù)(2022年14期)2022-09-22 03:07:40
機(jī)械工業(yè)標(biāo)準(zhǔn)化與質(zhì)量(2022年6期)2022-08-12 02:07:42
艦船科學(xué)技術(shù)(2022年2期)2022-03-29 01:12:44
船舶(2021年4期)2021-09-07 17:32:22
小哥白尼(趣味科學(xué))(2019年10期)2020-01-18 09:16:22
船舶標(biāo)準(zhǔn)化工程師(2019年4期)2019-07-24 07:21:12
軍工文化(2017年12期)2017-07-17 06:08:06
中國(guó)船檢(2017年3期)2017-05-18 11:33:09
船海工程(2015年4期)2016-01-05 15:53:30