基于內(nèi)三角形質(zhì)心算法的超寬帶室內(nèi)定位
2017-04-17 05:13:30賀晶晶張會(huì)猛
計(jì)算機(jī)應(yīng)用 2017年1期
魏 培,姜 平,賀晶晶,張會(huì)猛
(1.南通大學(xué) 電氣工程學(xué)院,江蘇 南通 226019; 2.南通大學(xué) 電子信息學(xué)院,江蘇 南通 226019)
(*通信作者電子郵箱jiang.p@ntu.edu.cn)
基于內(nèi)三角形質(zhì)心算法的超寬帶室內(nèi)定位
魏 培1,姜 平1*,賀晶晶1,張會(huì)猛2
(1.南通大學(xué) 電氣工程學(xué)院,江蘇 南通 226019; 2.南通大學(xué) 電子信息學(xué)院,江蘇 南通 226019)
(*通信作者電子郵箱jiang.p@ntu.edu.cn)
針對(duì)工業(yè)現(xiàn)場(chǎng)自動(dòng)導(dǎo)引運(yùn)輸車(chē)(AGV)定位方式靈活性差的問(wèn)題,應(yīng)用DW1000射頻(RF)芯片,設(shè)計(jì)實(shí)現(xiàn)了一種超寬帶(UWB)室內(nèi)定位系統(tǒng)。首先,提出了高效的多基站測(cè)距和多標(biāo)簽調(diào)度機(jī)制,解決標(biāo)簽沖突和組網(wǎng)問(wèn)題。其次,針對(duì)三角形質(zhì)心算法實(shí)際應(yīng)用中測(cè)距極大誤差引起的定位精度低、穩(wěn)定差的問(wèn)題,引入可信度概念,提出了內(nèi)三角形質(zhì)心算法,通過(guò)可信度算子削弱測(cè)距極大誤差的影響,提高算法性能。最后,將該系統(tǒng)應(yīng)用于工業(yè)車(chē)間,當(dāng)系統(tǒng)容納20個(gè)標(biāo)簽時(shí),單個(gè)標(biāo)簽的坐標(biāo)平均更新頻率達(dá)到24 Hz,標(biāo)準(zhǔn)差為3 Hz;靜態(tài)平均定位誤差為11.7 cm,標(biāo)準(zhǔn)差為2.5 cm;動(dòng)態(tài)最大誤差小于30 cm。實(shí)驗(yàn)結(jié)果表明,該系統(tǒng)具有高實(shí)時(shí)性、高精度和高穩(wěn)定性的特點(diǎn)。
自動(dòng)導(dǎo)引運(yùn)輸車(chē);超寬帶;室內(nèi)定位系統(tǒng);三角形質(zhì)心算法;定位性能
0 引言
隨著智能制造技術(shù)的進(jìn)一步發(fā)展,自動(dòng)導(dǎo)引運(yùn)輸車(chē)(Automated Guided Vehicle, AGV)作為一種車(chē)間運(yùn)輸設(shè)備,其室內(nèi)自主定位技術(shù)的研究也進(jìn)入到嶄新的發(fā)展階段[1]。實(shí)際工業(yè)應(yīng)用中,AGV定位主要有預(yù)設(shè)路徑法和非預(yù)設(shè)路徑法兩種方式。預(yù)設(shè)路徑法利用電磁、光電等技術(shù),通過(guò)在預(yù)設(shè)路徑上鋪設(shè)電線、噴涂導(dǎo)引線實(shí)現(xiàn)定位功能,這種定位方式使工業(yè)車(chē)間不美觀、小車(chē)控制靈活性不夠,且難以實(shí)現(xiàn)多移動(dòng)機(jī)器人復(fù)雜路徑的控制。非預(yù)設(shè)路徑法主要采用激光、視覺(jué)技術(shù),實(shí)現(xiàn)成本較高,同時(shí)易受環(huán)境因素的制約,因而不能廣泛應(yīng)用于實(shí)際工業(yè)現(xiàn)場(chǎng)[2]。超寬帶(Ultra WideBand, UWB)技術(shù)是一種利用亞納秒級(jí)超窄脈沖的無(wú)載波通信技術(shù),具有高分辨率、抗多徑效應(yīng)、穿透力強(qiáng)、硬件結(jié)構(gòu)簡(jiǎn)單、頻譜利用率高等優(yōu)點(diǎn),成為目前室內(nèi)高精度定位應(yīng)用最佳物理層技術(shù),能夠?qū)崿F(xiàn)對(duì)移動(dòng)物體的精確定位[3-4]。
三角形質(zhì)心算法是一種基于三邊測(cè)量[5]的定位算法,在室內(nèi)定位系統(tǒng)中被廣泛使用。文獻(xiàn)[6]將三角形質(zhì)心算法應(yīng)用到無(wú)線傳感器網(wǎng)絡(luò)中,但由于普通三角形質(zhì)心算法未能體現(xiàn)信標(biāo)節(jié)點(diǎn)對(duì)節(jié)點(diǎn)位置影響力的問(wèn)題,算法穩(wěn)定性差。文獻(xiàn)[7]針對(duì)具體實(shí)驗(yàn)環(huán)境,提出一種新型的加權(quán)方法,使用測(cè)試距離倒數(shù)之和作為權(quán)重因子,同時(shí)使用修正系數(shù),避免信息淹沒(méi)現(xiàn)象,提高算法定位精度,但該方法過(guò)于依賴實(shí)際環(huán)境,適應(yīng)能力較差。文獻(xiàn)[8]在此基礎(chǔ)上,考慮環(huán)境因素對(duì)算法精度的影響,尋找能夠更精確地估算未知節(jié)點(diǎn)最終位置的坐標(biāo)集合,有效地減小了多次估算質(zhì)心產(chǎn)生的累積誤差,提高了算法的性能,但算法流程較多,實(shí)現(xiàn)比較復(fù)雜。
本文基于UWB技術(shù),采用Decawave公司的DW1000射頻芯片,應(yīng)用基于非對(duì)稱雙邊雙向測(cè)距(Asymmetric Double Sided Two-Way Ranging, ADS-TWR)技術(shù)的定位機(jī)制,針對(duì)三角形質(zhì)心算法在實(shí)際應(yīng)用中出現(xiàn)的定位精度低、穩(wěn)定性差問(wèn)題,引入可信度概念,提出內(nèi)三角形質(zhì)心算法,設(shè)計(jì)并實(shí)現(xiàn)一種高實(shí)時(shí)性、高精度和高穩(wěn)定性的室內(nèi)AGV定位系統(tǒng)。
1 室內(nèi)無(wú)線定位系統(tǒng)
圖1為UWB室內(nèi)定位系統(tǒng)示意圖,模擬在具有4個(gè)生產(chǎn)工位的工業(yè)車(chē)間,AGV實(shí)現(xiàn)工位間自動(dòng)搬運(yùn)原料進(jìn)行加工的場(chǎng)景。為了實(shí)現(xiàn)對(duì)AGV的位置等狀態(tài)信息進(jìn)行有效監(jiān)控,系統(tǒng)設(shè)為三級(jí)分布式控制結(jié)構(gòu)(設(shè)備層-數(shù)據(jù)層-應(yīng)用層),各層之間通過(guò)WiFi或Internet網(wǎng)絡(luò)連接。
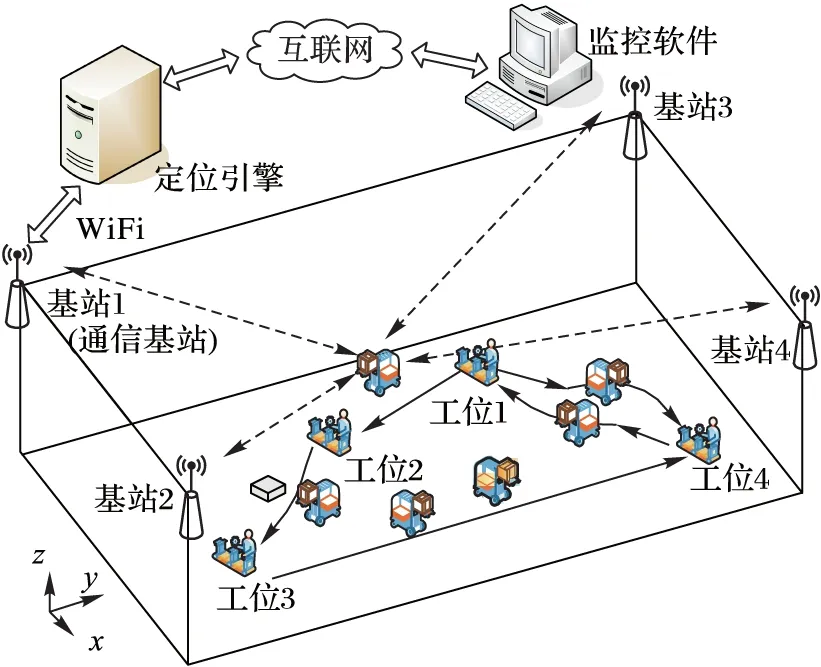
圖1 室內(nèi)無(wú)線定位系統(tǒng)示意圖
設(shè)備層包括AGV、安裝在車(chē)間頂部的基站和安裝在AGV上的標(biāo)簽。基站分為通信基站(基站1)和普通基站(基站2、基站3和基站4),與普通基站相比,通信基站安裝有WiFi模塊,用于連接設(shè)備層和數(shù)據(jù)層。硬件設(shè)計(jì)上,基站和標(biāo)簽均由單片機(jī)和DW1000芯片組成的通信模塊構(gòu)成,且由軟件設(shè)置模塊工作模式實(shí)現(xiàn)基站或標(biāo)簽功能。通過(guò)參數(shù)配置,DW1000可以精確地測(cè)量到UWB信號(hào)接收和發(fā)送的時(shí)間,在系統(tǒng)定位機(jī)制下,標(biāo)簽與基站間應(yīng)用ADS-TWR測(cè)距技術(shù)計(jì)算距離,并利用UWB信號(hào)具有的通信功能,將距離值等數(shù)據(jù)經(jīng)通信基站上傳至數(shù)據(jù)層。標(biāo)簽(普通基站,通信基站另外設(shè)有WiFi功能模塊)、AGV控制原理如圖2所示,其中標(biāo)簽與AGV之間使用串口進(jìn)行通信。
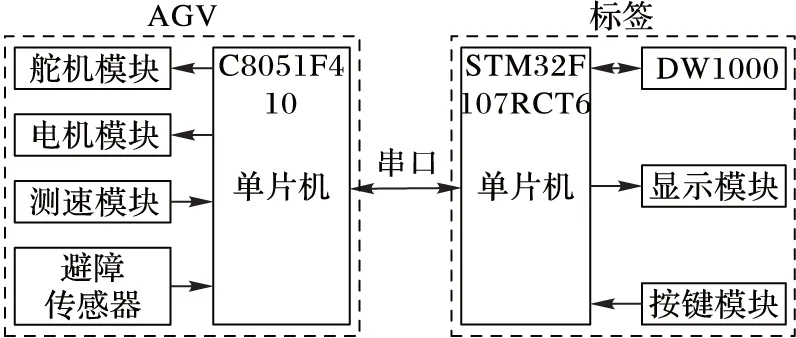
圖2 標(biāo)簽(基站)和AGV控制原理
數(shù)據(jù)層由定位引擎構(gòu)成,利用定位算法計(jì)算標(biāo)簽坐標(biāo)。應(yīng)用層使用C#技術(shù)開(kāi)發(fā)基于Windows平臺(tái)的監(jiān)控軟件,供用戶查詢AGV位置等狀態(tài)信息和設(shè)置各種系統(tǒng)參數(shù)。
2 基于測(cè)距技術(shù)的UWB定位機(jī)制
2.1 ADS-TWR技術(shù)
實(shí)時(shí)定位系統(tǒng)中,為了計(jì)算標(biāo)簽的位置坐標(biāo),必須準(zhǔn)確地測(cè)量標(biāo)簽與基站間的距離。ADS-TWR技術(shù)是一種異步測(cè)距技術(shù),通過(guò)在兩個(gè)不同節(jié)點(diǎn)間依次完成雙向測(cè)距減小節(jié)點(diǎn)兩側(cè)時(shí)鐘偏置引起的測(cè)量誤差,計(jì)算信號(hào)在節(jié)點(diǎn)間的無(wú)線傳播時(shí)延(Time Of Flight, TOF),從而估算節(jié)點(diǎn)之間的距離[9-11]。ADS-TWR測(cè)距過(guò)程如圖3所示,ttof表示UWB信號(hào)在標(biāo)簽與基站間的無(wú)線傳播時(shí)延,tsp、trr、tsf、trp、tsr、trf代表UWB信號(hào)離開(kāi)或到達(dá)基站(標(biāo)簽)天線的時(shí)間,測(cè)距過(guò)程如下:首先標(biāo)簽主動(dòng)向基站發(fā)送請(qǐng)求幀觸發(fā)測(cè)距時(shí)序,基站接收到請(qǐng)求幀后啟動(dòng)計(jì)時(shí),在應(yīng)答時(shí)間treplyB后向標(biāo)簽發(fā)送應(yīng)答幀,標(biāo)簽接收到應(yīng)答幀后啟動(dòng)計(jì)時(shí),同時(shí)將treplyA和troundA值寫(xiě)入終止幀,并在應(yīng)答時(shí)間treplyA后將終止幀發(fā)送給基站,基站接收到終止幀表示測(cè)距時(shí)序結(jié)束。基站計(jì)算距離如式(1)~(2)所示:
(1)
d=ttof×c
(2)
其中:c表示UWB信號(hào)傳播速率;d表示標(biāo)簽與基站間距離。
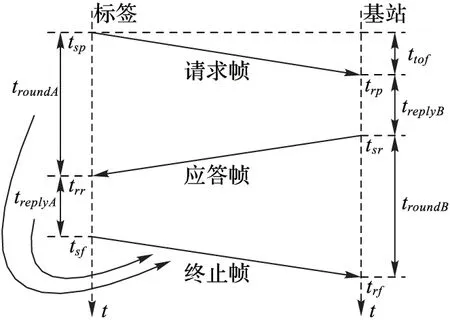
圖3 ADS-TWR測(cè)距原理
測(cè)距誤差如式(3)所示:
error=ttof×(1-(ka+kb)/2)
(3)
其中:ka、kb為節(jié)點(diǎn)側(cè)的時(shí)鐘偏置系數(shù)(接近1)。可以看出,ADS-TWR技術(shù)在保證測(cè)量精度的同時(shí),對(duì)兩側(cè)節(jié)點(diǎn)應(yīng)答時(shí)間的對(duì)稱性無(wú)要求,因而具有很強(qiáng)的實(shí)用性。本文設(shè)計(jì)基于DW1000的基站和標(biāo)簽,在室內(nèi)視距(LineofSight,LoS)環(huán)境下可實(shí)現(xiàn)10cm測(cè)距精度。
2.2 多基站測(cè)距機(jī)制
基于ADS-TWR技術(shù)的室內(nèi)定位要求標(biāo)簽至少與3個(gè)基站完成測(cè)距,為了減少標(biāo)簽測(cè)距的時(shí)間,保證定位系統(tǒng)的實(shí)時(shí)性要求,本文采用如圖4所示優(yōu)化的多基站測(cè)距機(jī)制。
請(qǐng)求幀包含4個(gè)基站的應(yīng)答時(shí)間,標(biāo)簽以廣播方式向所有基站發(fā)送請(qǐng)求幀觸發(fā)多基站測(cè)距時(shí)序,各基站解析請(qǐng)求幀信息,并按設(shè)置的應(yīng)答時(shí)間依序向標(biāo)簽發(fā)送應(yīng)答幀,標(biāo)簽在接收到基站應(yīng)答幀后,將用于計(jì)算TOF的參數(shù)寫(xiě)入終止幀,以廣播方式發(fā)送給所有基站,基站接收終止幀,表示一輪多基站測(cè)距時(shí)序結(jié)束。根據(jù)式(1)~(2),各基站計(jì)算與標(biāo)簽的距離值。
應(yīng)用多基站測(cè)距機(jī)制,標(biāo)簽與4個(gè)基站間僅需發(fā)送6組幀包即可完成測(cè)距工作。通過(guò)調(diào)整DW1000工作參數(shù),優(yōu)化UWB幀包結(jié)構(gòu),實(shí)際應(yīng)用中可控制單個(gè)幀包傳輸時(shí)間小于250μs,最終實(shí)現(xiàn)單次多基站測(cè)距時(shí)序時(shí)間小于2ms,從而滿足定位系統(tǒng)對(duì)實(shí)時(shí)性的要求。
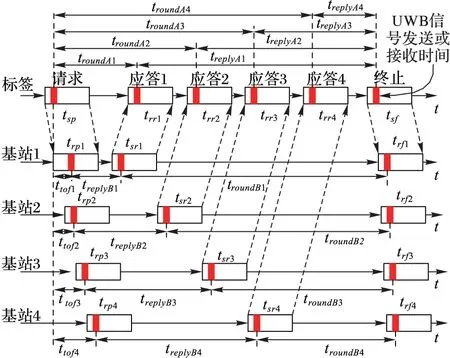
圖4 多基站測(cè)距時(shí)序示意圖
2.3 多標(biāo)簽調(diào)度機(jī)制
定位系統(tǒng)實(shí)際應(yīng)用需要解決標(biāo)簽組網(wǎng)和多標(biāo)簽防沖突算法設(shè)計(jì)問(wèn)題[12],通過(guò)引入計(jì)算機(jī)領(lǐng)域“注冊(cè)注銷(xiāo)”和“按時(shí)間片輪轉(zhuǎn)”思想,設(shè)計(jì)一種多標(biāo)簽調(diào)度機(jī)制,有效保證定位系統(tǒng)高效運(yùn)行。
系統(tǒng)調(diào)度機(jī)制如圖5所示,當(dāng)標(biāo)簽通電后,首先向通信基站(基站1)發(fā)送注冊(cè)幀,請(qǐng)求一個(gè)合法身份,在接收并解析通信基站注冊(cè)應(yīng)答幀后,標(biāo)簽獲得基站坐標(biāo)等信息,并得到一個(gè)時(shí)間片序號(hào),該時(shí)間片序號(hào)決定標(biāo)簽何時(shí)可以觸發(fā)測(cè)距時(shí)序。為了優(yōu)化性能,通信基站會(huì)定期掃描所有標(biāo)簽,注銷(xiāo)一段時(shí)間內(nèi)沒(méi)有消息的標(biāo)簽,更新標(biāo)簽時(shí)間片序號(hào)。
3 定位算法
基于ADS-TWR測(cè)距技術(shù)的定位方法總結(jié)為:在系統(tǒng)調(diào)度機(jī)制下,標(biāo)簽依序與基站完成ADS-TWR測(cè)距過(guò)程,對(duì)距離值進(jìn)行濾波去噪[13-15]后,運(yùn)用定位算法計(jì)算標(biāo)簽的位置坐標(biāo)。如何改進(jìn)定位算法,對(duì)提高系統(tǒng)定位精度和穩(wěn)定性有著重要的作用。
3.1 三角形質(zhì)心算法模型
三角形質(zhì)心算法模型如圖6所示,標(biāo)簽T與基站Ai(i=1,2,3)的距離為di,以基站位置為圓心,相應(yīng)的測(cè)距值為半徑畫(huà)圓,得到標(biāo)簽的3個(gè)近似位置特征點(diǎn)B、C、D,則△BCD質(zhì)心即為標(biāo)簽坐標(biāo),如式(4)所示:
(4)
三角形質(zhì)心算法通過(guò)將標(biāo)簽坐標(biāo)確定在△BCD內(nèi),并利用三角形質(zhì)心估算標(biāo)簽坐標(biāo),實(shí)現(xiàn)對(duì)標(biāo)簽的定位。當(dāng)標(biāo)簽與各基站測(cè)距誤差均勻分布時(shí),該算法可以獲得較高的定位精度。但實(shí)際應(yīng)用中UWB信號(hào)傳播易受多徑和非視距(NonLineofSight,NLoS)現(xiàn)象影響,同時(shí),又由于室內(nèi)環(huán)境復(fù)雜多變,難以通過(guò)建立一個(gè)具有普遍適用性的UWB信道模型來(lái)估計(jì)測(cè)距誤差范圍,這使得算法穩(wěn)定性得不到保證[16]。針對(duì)三角形質(zhì)心算法存在的不足,下面提出一種基于“可信度算子”的內(nèi)三角形質(zhì)心算法,即通過(guò)引入可信度算子,削弱測(cè)距極大誤差的影響,從而提高算法的定位精度和穩(wěn)定性。
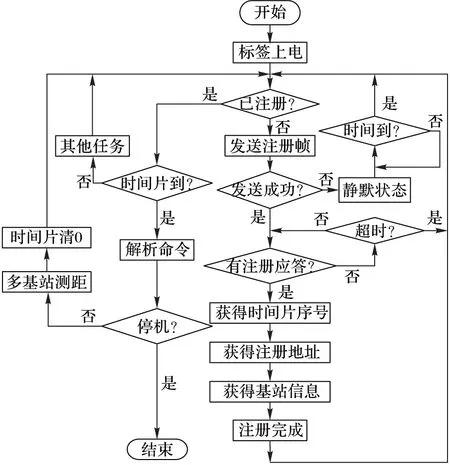
圖5 多標(biāo)簽系統(tǒng)調(diào)度流程
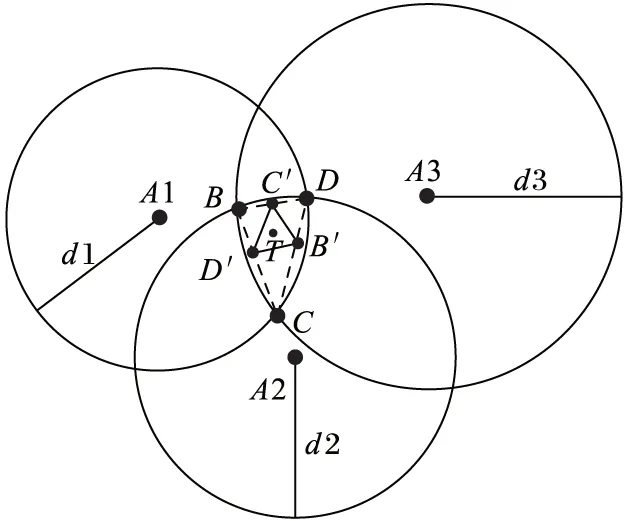
圖6 三角形質(zhì)心算法模型
3.2 內(nèi)三角形質(zhì)心算法
3.2.1 可信度算子
由圖6可知,當(dāng)標(biāo)簽與某一個(gè)基站測(cè)距誤差較大時(shí),相應(yīng)的特征點(diǎn)明顯遠(yuǎn)離其他點(diǎn),使得三角形質(zhì)心嚴(yán)重偏離標(biāo)簽實(shí)際位置,定位精度下降。本文提出可信度概念用于體現(xiàn)特征點(diǎn)與標(biāo)簽實(shí)際位置的接近程度,即特征點(diǎn)越接近標(biāo)簽實(shí)際位置,可信度越高,對(duì)標(biāo)簽坐標(biāo)計(jì)算的影響力越大;反之,可信度越低,影響力越小。可信度通過(guò)可信度算子K表示,如式(5)所示:
K=1/LN
(5)
其中:L表示特征點(diǎn)與標(biāo)簽實(shí)際位置間的距離;N為可信度修正系數(shù),用于分配特征點(diǎn)間權(quán)重主次關(guān)系,可根據(jù)實(shí)際環(huán)境選取合適的值。
3.2.2 算法模型
算法思想如下:對(duì)于具有3個(gè)基站的定位算法模型,假設(shè)某一特征點(diǎn)為標(biāo)簽實(shí)際位置,計(jì)算其余特征點(diǎn)的可信度算子K,運(yùn)用加權(quán)平均公式求取這些特征點(diǎn)的等效位置;依次對(duì)3個(gè)特征點(diǎn)作上述處理,可以求得3個(gè)等效特征點(diǎn),以等效特征點(diǎn)為頂點(diǎn)的內(nèi)三角形質(zhì)心即為標(biāo)簽坐標(biāo)。如圖6所示,以特征點(diǎn)B為例,LBC和LBD分別代表特征點(diǎn)C、D與參考點(diǎn)B間距離,設(shè)N=1,則KC=1/LBC、KD=1/LBD,根據(jù)式(6)可以得到加權(quán)特征點(diǎn)B′,同理以C、D為參考點(diǎn)可得C′、D′,則△B′C′D′質(zhì)心為標(biāo)簽坐標(biāo)。
(6)

4 實(shí)驗(yàn)及結(jié)果分析
4.1 實(shí)驗(yàn)環(huán)境
實(shí)驗(yàn)地點(diǎn)為室內(nèi)18m×16m×6m的工業(yè)車(chē)間,該環(huán)境下多徑和NLoS干擾現(xiàn)象較為嚴(yán)重。在車(chē)間四角布置4個(gè)基站,高度4m,基站硬件結(jié)構(gòu)如圖7所示,其中最左邊為通信基站,安裝有WiFi功能模塊。同時(shí),為了對(duì)系統(tǒng)中的數(shù)據(jù)進(jìn)行有效監(jiān)控,使用如圖8所示的監(jiān)控軟件界面。

圖7 基站(標(biāo)簽)實(shí)物圖
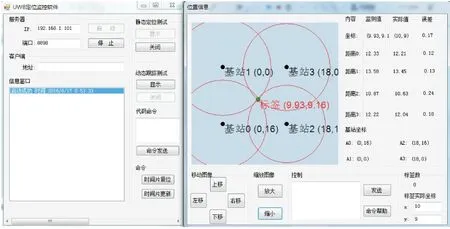
圖8 應(yīng)用層監(jiān)控軟件
4.2 定位算法性能比較
為了驗(yàn)證三角形質(zhì)心算法在多徑和NLoS環(huán)境下的定位精度和穩(wěn)定性,在車(chē)間中選取10個(gè)具有代表性的位置(標(biāo)簽與1~2個(gè)基站之間有遮擋物,遮擋物為厚度1cm的鋼板),將同一個(gè)標(biāo)簽依次靜止放置在上述位置,分別使用三角形質(zhì)心算法和內(nèi)三角形質(zhì)心算法進(jìn)行對(duì)比實(shí)驗(yàn)。實(shí)驗(yàn)1使用三角形質(zhì)心算法,實(shí)驗(yàn)2、3、4使用內(nèi)三角形質(zhì)心算法,分別設(shè)置可信度修正系數(shù)N=1、N=2和N=3。通過(guò)19次測(cè)量取中位值的方法減小誤差,并利用監(jiān)控軟件記錄實(shí)驗(yàn)數(shù)據(jù),如表1所示。
可以看出,在室內(nèi)多徑和NLoS環(huán)境下,三角形質(zhì)心算法定位精度較低,且對(duì)于標(biāo)簽位于定位區(qū)域邊緣時(shí),定位誤差明顯增大,算法穩(wěn)定性較差。而內(nèi)三角形質(zhì)心算法通過(guò)引入可信度算子,明顯提高了定位精度和穩(wěn)定性,相比實(shí)驗(yàn)1,實(shí)驗(yàn)2、實(shí)驗(yàn)3、實(shí)驗(yàn)4使用內(nèi)三角質(zhì)心算法定位誤差平均減小9.2cm、16.4cm和12.9cm,標(biāo)準(zhǔn)差減小2.4cm、5.1cm和3.8cm。同時(shí)發(fā)現(xiàn),根據(jù)實(shí)際環(huán)境調(diào)整可信度修正系數(shù)N,可有效減小標(biāo)簽位于定位區(qū)域邊緣時(shí)的定位誤差,進(jìn)一步提高定位算法的性能。由表1數(shù)據(jù)可知,針對(duì)當(dāng)前實(shí)驗(yàn)環(huán)境,選取N=2,定位誤差穩(wěn)定在20cm以內(nèi)。
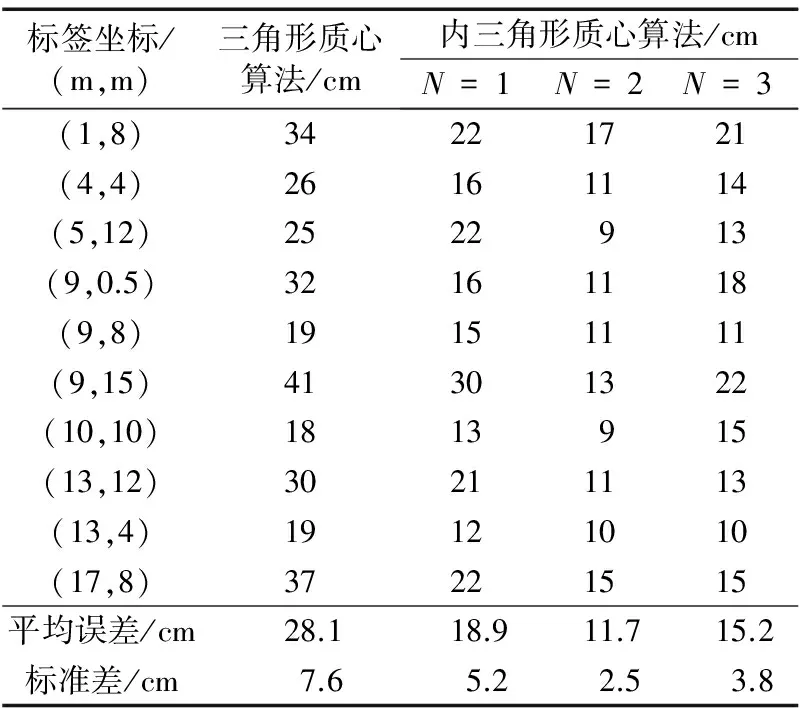
表1 定位誤差
4.3 系統(tǒng)性能驗(yàn)證
進(jìn)一步,根據(jù)車(chē)間中AGV實(shí)際使用情況,將標(biāo)簽數(shù)量擴(kuò)大到20個(gè),檢驗(yàn)系統(tǒng)的實(shí)時(shí)性和定位精度。實(shí)驗(yàn)過(guò)程如下:從系統(tǒng)中隨機(jī)選取一個(gè)標(biāo)簽,保持高度不變,以0.5m/s的速度沿著設(shè)定的路線移動(dòng),監(jiān)控軟件記錄該標(biāo)簽移動(dòng)過(guò)程中所有的定位數(shù)據(jù);同時(shí)選擇30個(gè)時(shí)間點(diǎn)(各時(shí)間點(diǎn)間隔大約為3min),記錄該時(shí)間點(diǎn)起1s中標(biāo)簽坐標(biāo)更新的次數(shù)。實(shí)驗(yàn)結(jié)果如圖9~10所示。
圖9反映了標(biāo)簽在30個(gè)采樣時(shí)間點(diǎn)上的坐標(biāo)更新頻率。當(dāng)系統(tǒng)容納20個(gè)標(biāo)簽時(shí),單個(gè)標(biāo)簽的坐標(biāo)平均更新頻率f=24Hz,標(biāo)準(zhǔn)差σ=3Hz,滿足了實(shí)際車(chē)間環(huán)境下對(duì)AGV快速定位的要求。
圖10描述了標(biāo)簽沿目標(biāo)軌跡移動(dòng)時(shí),系統(tǒng)所記錄的標(biāo)簽位置信息。可以看出,標(biāo)簽偏離目標(biāo)軌跡的最大距離為28cm,相比標(biāo)簽靜止時(shí)所計(jì)算的定位誤差,由于標(biāo)簽移動(dòng)過(guò)程中存在的各種干擾因素,實(shí)際動(dòng)態(tài)誤差偏大,但仍能保證一定的定位精度和穩(wěn)定性。
5 結(jié)語(yǔ)
本文針對(duì)工業(yè)現(xiàn)場(chǎng)AGV定位方式靈活性差的問(wèn)題,使用UWB技術(shù),設(shè)計(jì)實(shí)現(xiàn)一種室內(nèi)定位系統(tǒng)。一方面,優(yōu)化系統(tǒng)定位機(jī)制,提高定位頻率;另一方面,針對(duì)傳統(tǒng)三角形質(zhì)心算法定位精度低和穩(wěn)定性差的問(wèn)題,提出了基于可信度算子內(nèi)三角形質(zhì)心算法。實(shí)驗(yàn)結(jié)果表明,系統(tǒng)具有高實(shí)時(shí)性、高精度和高穩(wěn)定性的特點(diǎn)。
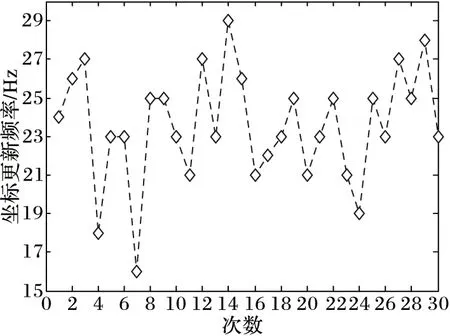
圖9 標(biāo)簽坐標(biāo)更新頻率
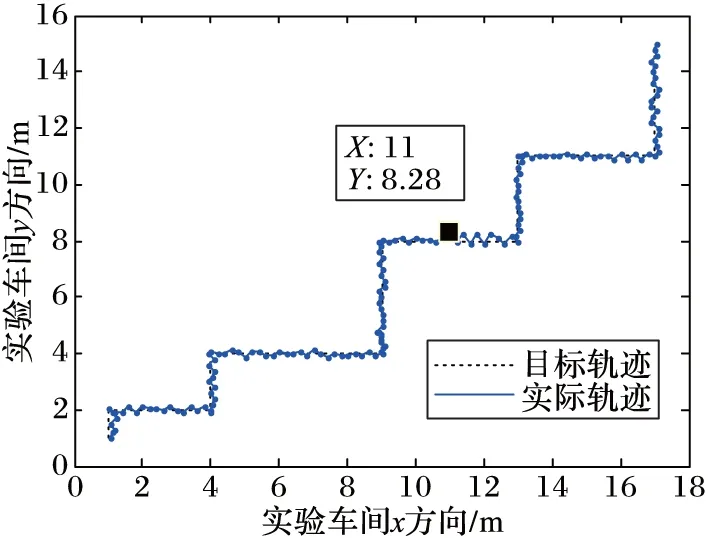
圖10 標(biāo)簽動(dòng)態(tài)軌跡
本文系統(tǒng)未來(lái)可應(yīng)用在社會(huì)生產(chǎn)的各個(gè)方面,但作為商用定位系統(tǒng)還存在以下問(wèn)題:1)系統(tǒng)定位功能實(shí)現(xiàn)需要標(biāo)簽與基站之間使用UWB脈沖信號(hào)進(jìn)行多輪通信,功耗較大,而實(shí)際應(yīng)用中,標(biāo)簽一般使用電池供電,標(biāo)簽低功耗設(shè)計(jì)問(wèn)題有待解決;2)標(biāo)簽使用系統(tǒng)分配的時(shí)間片序號(hào)進(jìn)行定位,隨著標(biāo)簽數(shù)量的增多,標(biāo)簽的定位頻率會(huì)明顯下降,系統(tǒng)標(biāo)簽容量受到制約;3)實(shí)際工業(yè)環(huán)境復(fù)雜多變,需要進(jìn)一步優(yōu)化定位算法,使系統(tǒng)達(dá)到更高的定位精度和穩(wěn)定性。
)
[1] 王健.AGV的研制與運(yùn)動(dòng)控制實(shí)驗(yàn)研究[D].哈爾濱:哈爾濱工業(yè)大學(xué),2012:1-5.(WANGJ.Researchondesignandmotioncontrolexperimentforautomatedguidedvehicle[D].Harbin:HarbinInstituteofTechnology, 2012: 1-5.)
[2] 胡克維.自動(dòng)導(dǎo)引小車(chē)AGV的導(dǎo)航和避障技術(shù)研究[D].杭州:浙江大學(xué),2012:2-5.(HUKW.Researchonnavigationandobstacleavoidancetechnologyforautomatedguidedvehicle[D].Hangzhou:ZhejiangUniversity, 2012: 2-5.)
[3] 郭建廣,鄭紫微,楊任爾.基于改進(jìn)變尺度法的超寬帶定位新算法[J].計(jì)算機(jī)應(yīng)用,2014,34(12):3395-3399.(GUOJG,ZHENGZW,YANGRE.NewUWBlocalizationalgorithmbasedonmodifiedDFPalgorithm[J].JournalofComputerApplications, 2014, 34(12): 3395-3399.)
[4]MONICAS,FERRARIG.Aswarm-basedapproachtoreal-time3Dindoorlocalization:experimentalperformanceanalysis[J].AppliedSoftComputing, 2016, 43: 489-497.
[5] 彭宇,王丹.無(wú)線傳感器網(wǎng)絡(luò)定位技術(shù)綜述[J].電子測(cè)量與儀器學(xué)報(bào),2011,25(5):389-399.(PENGY,WANGD.Areview:wirelesssensornetworkslocalization[J].JournalofElectronicMeasurementandInstrument, 2011, 25(5): 389-399.)
[6] 林瑋,陳傳峰.基于RSSI的無(wú)線傳感器網(wǎng)絡(luò)三角形質(zhì)心定位算法[J].現(xiàn)代電子技術(shù),2009,32(2):180-182.(LINW,CHENCF.RSSI-basedtriangleandcentroidlocationinwirelesssensornetwork[J].ModernElectronicsTechnique, 2009, 32(2): 180-182.)
[7]LIJ,LIUHP.AnewweightedcentroidlocalizationalgorithmincoalMinewirelesssensornetworks[C]//Proceedingsofthe2011 3rdInternationalConferenceonComputerResearchandDevelopment.Piscataway,NJ:IEEE, 2011: 106-109.
[8] 李虎俊,郭藍(lán)天,盧軍,等.基于二次質(zhì)心的無(wú)線傳感器網(wǎng)絡(luò)定位算法[J].現(xiàn)代電子技術(shù),2014,37(23):5-8, 12.(LIHJ,GUOLT,LUJ,etal.Twicecentroidbasedlocalizationalgorithmforwirelesssensornetwork[J].ModernElectronicsTechnique, 2014, 37(23): 5-8, 12.)
[9]JIANGY,LEUNGVCM.Anasymmetricdoublesidedtwo-way-rangingforcrystaloffset[C]//ISSSE’07:Proceedingsofthe2007InternationalSymposiumonSignals,SystemsandElectronics.Piscataway,NJ:IEEE, 2007: 525-528.
[10] 段翠翠,王瑞榮,王建中,等.基于無(wú)線傳感器網(wǎng)絡(luò)的高危生產(chǎn)區(qū)人員定位系統(tǒng)[J].傳感技術(shù)學(xué)報(bào),2012,25(11):1599-1602.(DUANCC,WANGRR,WANGJZ,etal.Locationsystemforstaffinhigh-riskproductionareabasedonwirelesssensornetworks[J].ChineseJournalofSensorsandActuators, 2012, 25(11): 1599-1602.)
[11] 常華偉,王福豹,嚴(yán)國(guó)強(qiáng),等.無(wú)線傳感器網(wǎng)絡(luò)的TOF測(cè)距方法研究[J].現(xiàn)代電子技術(shù),2011,34(1):35-38.(CHANGHW,WANGFB,YANGQ,etal.TOFrangingmethodforwirelesssensornetworks[J].ModernElectronicsTechnique, 2011, 34(1): 35-38.)
[12] 韋子輝,馮正和,王志峰,等.脈沖超寬帶定位單元設(shè)計(jì)及應(yīng)用測(cè)試[J].電視技術(shù),2014,38(23):60-63.(WEIZH,FENGZH,WANGZF,etal.DesignandapplicationtestofIR-UWBpositioningunit[J].VideoEngineering, 2014, 38(23): 60-63.)
[13] 肖如良,李奕諾,江少華,等.基于卡爾曼濾波與中位加權(quán)的定位算法[J].計(jì)算機(jī)應(yīng)用,2014,34(12):3387-3390,3394.(XIAORL,LIYN,JIANGSH,etal.IndoorpositioningbasedonKalmanfilterandweightedmedian[J].JournalofComputerApplications, 2014, 34(12): 3387-3390, 3394.)
[14] 李奕諾,肖如良,倪友聰,等.基于動(dòng)態(tài)環(huán)境衰減的粒子濾波室內(nèi)定位算法[J].計(jì)算機(jī)應(yīng)用,2015,35(9):2465-2469.(LIYN,XIAORL,NIYC,etal.Indoorpositioningalgorithmwithdynamicenvironmentattenuationbasedonparticlefiltering[J].JournalofComputerApplications, 2015, 35(9): 2465-2469.)
[15] 劉洞波,楊高波,肖鵬,等.移動(dòng)機(jī)器人自適應(yīng)抗差無(wú)跡粒子濾波定位算法[J].儀器儀表學(xué)報(bào),2015,36(5):1131-1137.(LIUDB,YANGGB,XIAOP,etal.Mobilerobotadaptiverobustunscentedparticlefilterlocalizationalgorithm[J].ChineseJournalofScientificInstrument, 2015, 36(5): 1131-1137.)[16] 樊甫華,阮懷林.低信噪比下非凸化壓縮感知超寬帶信道估計(jì)方法[J].電子學(xué)報(bào),2014,42(2):353-359.(FAN F H, RUAN H L.Non-convex compressive sensing Ultra-Wide Band channel estimation method in low SNR conditions [J].Acta Electronica Sinica, 2014, 42(2): 353-359.)
This work is supported by the National Natural Science Foundation of China (61371111).
WEI Pei, born in 1992, M.S.candidate.His research interests include wireless sensor network localization, embedded system.
JIANG Ping, born in 1962, M.S., professor.His research interests include detection technology, intelligent control.
HE Jingjing, born in 1992, M.S.candidate.Her research interests include mobile communication system.
ZHANG Huimeng, born in 1992, M.S.candidate.His research interests include remote control of Internet of things.
Ultra wideband indoor localization based on inner triangle centroid algorithm
WEI Pei1, JIANG Ping1*, HE Jingjing1, ZHANG Huimeng2
(1.SchoolofElectricalEngineering,NantongUniversity,NantongJiangsu226019,China;2.SchoolofElectronicInformation,NantongUniversity,NantongJiangsu226019,China)
Aiming at the poor flexibility of Automated Guided Vehicle (AGV) localization method in industrial working field, an Ultra WideBand (UWB) indoor localization system by using DW1000 Radio Frequency (RF) chip was designed and implemented.Firstly, to solve the problem of conflicts and networking of tags, the efficient mechanisms for multi-station ranging and multi-tag scheduling were proposed.Secondly, concerning the low accuracy and poor stability of the triangle centroid localization algorithm caused by maximal ranging errors, a concept of credibility was introduced and the inner triangle centroid algorithm was proposed, which could weaken the influence of maximal ranging errors through credibility coefficient to improve the algorithm performance.Finally, the proposed system was applied to the industrial workshop with 20 tags.For a single tag, the average frequency of coordinate updating reached 24 Hz and its standard deviation was 3 Hz; the static average localization error was 11.7 cm and its standard deviation was 2.5 cm; the dynamic maximum error was within 30 cm.The experimental results show that the proposed localization system has the characteristics of high real-time performance, high precision and high stability.
Automated Guided Vehicle (AGV); Ultra WideBand (UWB); indoor localization system; triangle centroid algorithm; localization performance
2016-06-24;
2016-08-30。 基金項(xiàng)目:國(guó)家自然科學(xué)基金資助項(xiàng)目(61371111)。
魏培(1992—),男,安徽池州人,碩士研究生,主要研究方向:無(wú)線傳感器網(wǎng)絡(luò)定位、嵌入式系統(tǒng); 姜平(1962—),男,江蘇南通人,教授,碩士,主要研究方向:檢測(cè)技術(shù)、智能控制; 賀晶晶(1992—),女,河南鄭州人,碩士研究生,主要研究方向:移動(dòng)通信系統(tǒng); 張會(huì)猛(1992—),男,山東濟(jì)寧人,碩士研究生,主要研究方向:物聯(lián)網(wǎng)遠(yuǎn)程控制。
1001-9081(2017)01-0289-05
10.11772/j.issn.1001-9081.2017.01.0289
TP212.6
A