混合動力汽車E-H模式切換中扭矩協調控制策略研究
2017-04-20 01:08:20孔慧芳
合肥工業大學學報(自然科學版) 2017年3期
孔慧芳, 王 瑞, 鮑 偉
(合肥工業大學 電氣與自動化工程學院,安徽 合肥 230009)
混合動力汽車E-H模式切換中扭矩協調控制策略研究
孔慧芳, 王 瑞, 鮑 偉
(合肥工業大學 電氣與自動化工程學院,安徽 合肥 230009)
在混合動力汽車進行E(electric drive mode,純電動模式)-H(hybrid drive mode,混合驅動模式)切換時,針對2個動力源響應特性差異、離合器接合等原因造成動力傳遞不平穩及整車沖擊的問題,文章制定了扭矩協調控制策略。整個扭矩協調控制策略按發動機的起動、調速和動力接入等3個不同階段制定,采用Matlab/Simulink搭建混合動力汽車模式切換控制策略模型和整車模型,對該策略的有效性進行驗證。仿真結果表明,該策略能夠減小扭矩波動和整車沖擊度,有效提高模式切換過程的平順性。
混合動力汽車;扭矩協調控制;模式切換;沖擊度
0 引 言
隨著節能和環保的要求進一步加大,兼顧了電動汽車和傳統汽車優點的混合動力汽車備受關注。混合動力汽車含有發動機和電機2種動力裝置,兩者的組合可形成多種工作模式。在不同工作模式之間切換時,由于發動機和電機在動態特性上的差異,離合器的接合或分離將會導致動力傳遞的不平穩,影響整車動力性能[1-3]。
針對這些問題,文獻[4-5]采用在線實時發動機瞬時轉速來估計發動機輸出扭矩,提出了“發動機扭矩開環+發動機動態扭矩估計+電機扭矩補償”的控制策略;文獻[6]提出了基于電機轉速閉環控制的混合動力汽車模式切換動態協調控制策略,以電機轉速作為反饋控制量在一定程度上解決了發動機扭矩不能實時精確估計的問題;文獻[7]將不同的工作模式對應混雜系統的不同子域,采用混雜系統切換控制理論來研究減小模式切換過程沖擊的方法;文獻[8-9]通過分析系統在不同驅動模式切換過程中發動機、電機以及離合器等參數變化,制定針對不同模式切換過程的扭矩協調控制策略。
本文以單軸并聯式混合動力汽車為研究對象,針對純電動模式(electric drive mode,E)到混合驅動模式(hybrid drive mode,H)的切換過程,制定此過程中的扭矩協調控制策略,解決切換過程中的整車沖擊問題。
1 結構介紹和驅動模式分析
單軸并聯式混合動力汽車主要由發動機、分離離合器、啟動/發電一體化(integrated starter and generator,ISG)電機、電源轉換設備、電池組、雙離合自動變速器(dual clutch transmission,DCT)以及動力傳動系統組成,結構如圖1所示。

圖1 單軸并聯式混合動力汽車結構
發動機與ISG電機之間通過分離離合器相連。分離離合器為濕式多片離合器,可通過控制其油壓來控制傳遞扭矩。ISG電機兼具發電機和電動機的雙重作用,同時在發動機起動時還要作為起動機使用。系統動力通過DCT變速箱和差速器最終傳遞到車輪。
為簡化分析過程,將圖1簡化為如圖2所示的動力學模型。其中,JE、JM、JT、Jd、JCE和JCM分別為發動機、電機、DCT、差速器、離合器主動片以及從動片的轉動慣量;Jω+mr2為車輪及車身等效轉動慣量;iDCT、id分別為DCT和差速器的速比。

圖2 動力學簡化模型
該混合動力系統結構為重度混合動力結構,通過控制動力裝置和離合器的工作狀態可實現多種工作模式。當車輛起步或低速行駛時,需求驅動功率較小,車輛運行在純電動模式;當需求驅動功率增大或電池電量不足時,則需要切換至發動機驅動模式;當整車加速或爬坡時,整車需求扭矩大于發動機高效區最大扭矩時,車輛進入混合驅動模式;當車輛電池SOC值較低,整車需求扭矩小于發動機高效區下限值時,車輛進入行車充電模式。主要部件各驅動模式下的工作狀態見表1所列。
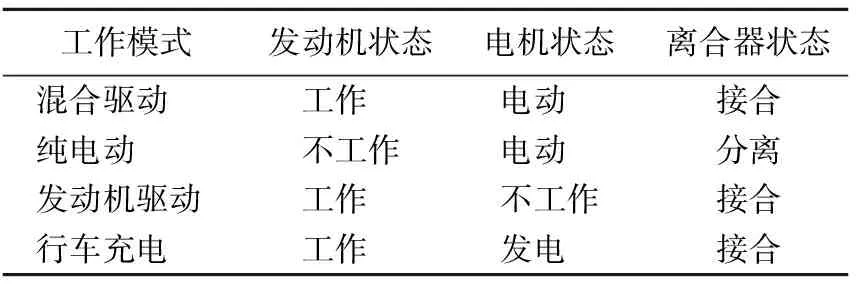
表1 混合動力系統驅動模式
由純電動模式到混合驅動模式的切換涉及發動機的起動及調速過程、離合器的多次接合過程等多種中間狀態,與其他驅動模式切換相比較為復雜,如果不進行協調控制,將產生縱向沖擊,嚴重影響整車的平順性,因此下文對該過程進行協調策略的制定。
2 扭矩協調控制策略
混合動力系統由純電動模式切換至混合驅動模式時,主要可分為3個過程,即發動機起動過程、調速過程以及動力接入過程,扭矩協調控制策略按照這3個過程的不同特點分別制定,流程如圖3所示。

圖3 模式切換流程圖
發動機起動過程、調速過程以及動力接入過程的時序如圖4所示。

圖4 純電動至混合驅動切換過程示意圖
0~t1階段,純電動模式;t1時刻發出模式切換信號;t1~t2階段,離合器預充油,迅速達到Kisspoint點,預備起動發動機;t2~t3階段,發動機起動,電機扭矩協調;t3~t5階段,發動機調速,電機扭矩協調;t5~t7階段,發動機動力接入,電機扭矩協調。
2.1 發動機起動階段扭矩協調控制策略
t2~t3階段,離合器油壓已經達到Kisspoint點,電機通過離合器傳遞扭矩帶動發動機起動。為保證整車的動力性,應進行電機扭矩協調控制,此時電機的扭矩分為2個部分,一部分提供整車動力,另一部分提供發動機起動所需的扭矩。此階段動力學方程為:
(1)
(2)
其中,TM為電機輸出扭矩;Ttf為等效到變速器輸入端的阻力矩;TStart為起動發動機所需的電機補償扭矩;Jh為離合器后端等效轉動慣量;ωM為電機轉動角速度。
通過控制分離離合器執行機構的油壓來控制傳遞扭矩的大小,使其扭矩跟隨電機補償扭矩,具體如下:
(3)
其中,TC為離合器傳遞扭矩。CO離合器期望油壓的表達式為:
(4)
其中,Pn為離合器的活塞單位面積上的作用壓力;Δωcr為離合器主動盤和從動盤的轉速差;sign(Δωcr)為符號函數;μd為離合器摩擦片的動摩擦系數;S為離合器活塞作用面積;Z為離合器的摩擦副數;R0為離合器的摩擦片外徑;R1為離合器的摩擦片外徑。
此階段發動機未點火,發動機轉速ωE與離合器傳遞扭矩TC關系為:
(5)
(6)
其中,Jq為離合器前端等效轉動慣量;TEf為發動機阻力矩,與發動機轉速成一定的函數關系,可通過查表得到。
通過上述動力學分析可得:設定發動機的期望角速度ωE,取發動機期望轉速和當前轉速的差值作為誤差,采用常規PID控制調節(kP、kI和kD分別取值為12.5、49.5和0),使得發動機轉速按照期望轉速由0加速到800 r/min的點火點轉速。
2.2 發動機調速階段扭矩協調控制策略
當達到點火轉速時,發動機收到點火命令起動發動機,進入電子控制單元(electronic control unint,ECU)控制的自調速階段。因為突然噴油點火造成的發動機轉矩波動會通過分離離合器傳遞給電機及傳動系統,造成動力系統沖擊,所以影響車輛的行駛,給駕駛員帶來不適感[10]。同時,因為發動機轉矩變化的時間常數明顯大于電動機轉矩變化的時間常數,所以影響當發動機起動后,進入下一階段會增大電機的扭矩協調范圍,直至模式切換的總體扭矩波動達到一定的指定范圍內。將起動時刻的電機轉速作為發動機怠速控制目標轉速發送給發動機控制器,保證發動機在噴油點火后的怠速控制目標轉速與當前傳動系統轉速相同。
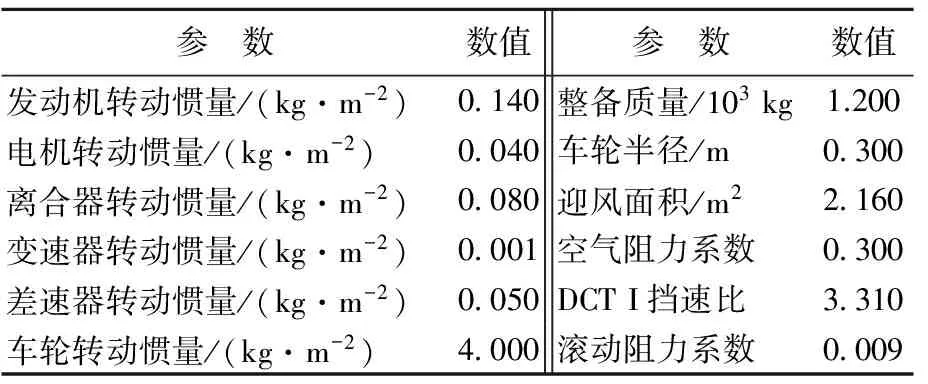
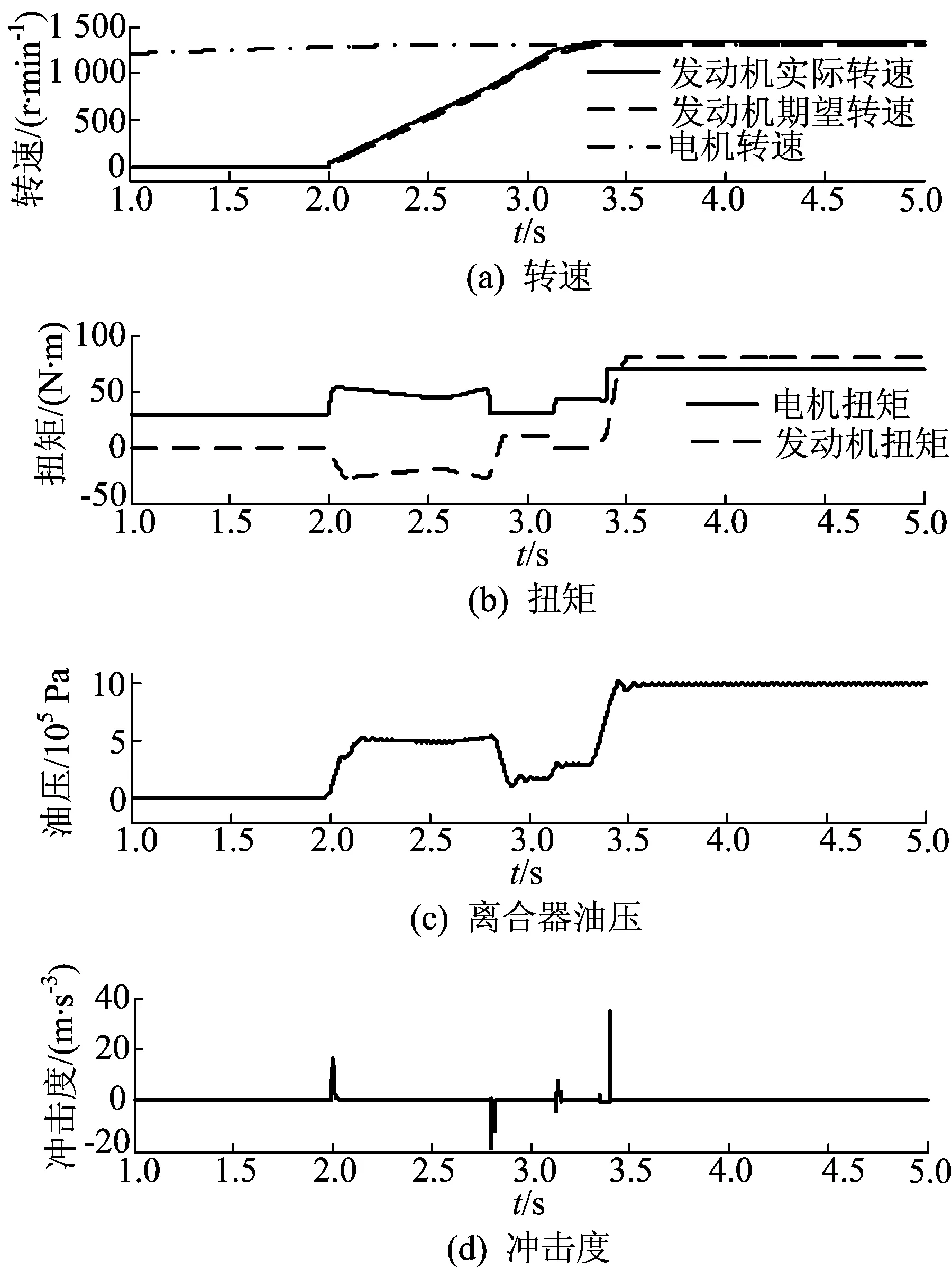
t3~t4階段,發動機剛起動時,與電機轉速相差較大,為了減小分離離合器主、從動盤接合帶來的沖擊,應控制離合器油壓迅速分離退油至Kisspoint點,發動機獨立起動,使發動機轉速迅速接近電機轉速,為下一階段做準備。此階段仍由電機提供驅動扭矩。當離合器主、從動盤轉速差達到指定范圍內,即|Δωcr| t4~t6階段,離合器進行快速接合,為減小離合器接合所帶來的沖擊度,應調節發動機輸出扭矩為0,此時發動機實際扭矩克服自身轉動阻力矩,發動機轉速由電機帶動上升直至與電機轉速同步,即 (7) 其中,TE為發動機扭矩。 此階段的動力學方程為: (8) (9) (10) 發動機轉速達到電機轉速后,離合器迅速充油至完全接合,此階段完成。 2.3 發動機動力接入階段扭矩協調控制策略 t6~t7階段是最終完成純電動模式向混合驅動模式切換的階段,其動力學方程為: (11) 因為無法準確實時預測發動機輸出扭矩,所以通過控制發動機扭矩變化的斜率來達到此階段減小整車沖擊度的效果。 控制發動機扭矩以特定斜率逐漸上升,電機扭矩斜率對應發動機斜率逐漸協調變化,考慮通過控制發動機、電機的負荷信號的變化率來控制其扭矩變化率以改善模式切換過程扭矩波動,即 (12) 切換過程中,需求驅動扭矩為: TE+∫kEdt+TM+∫kMdt= (13) 同時 (14) 因此可得: (15) 其中,TM-exp、TE-exp、TDrv-exp分別為電機、發動機以及駕駛員期望扭矩;kM、kE、kDrv分別為發動機、電機以及駕駛員需求驅動扭矩的變化率。 發動機不能直接響應轉矩命令,其控制較為復雜,當發動機ECU接收到目標轉矩后,對目標轉矩解析,將目標轉矩信號轉化為節氣門開度信號,通過發動機節氣門開度的變化調節發動機轉矩變化率。 當電機和發動機的扭矩各自達到預定需求扭矩后,模式切換就此完成。 (16) 其中,ig為變速器速比;i0為主減速器傳動比;δ為汽車旋轉質量換算系數;m為汽車質量;r為車輪半徑;Ts為總輸出扭矩。 各國沖擊度量化指標各不相同,德國推薦值為|J|≤10 m/s3,我國推薦值[12]為|J|≤17.64 m/s3。 在Matlab/Simulink環境下,建立模式切換控制策略模型邏輯圖如圖5所示,將圖5模型嵌入到搭建好的整車模型中,構成的整車模型邏輯圖如圖6所示。 圖5 模式切換控制策略模型邏輯圖 圖6 混合動力汽車整車模型邏輯圖 車輛部分主要參數見表2所列。 表2 整車主要參數 現進行由純電動模式(電機提供扭矩30 N·m到混合驅動模式(發動機提供扭矩80 N·m、電機提供扭矩70 N·m)的切換仿真過程。2.0 s之前車輛運行在純電動模式;在第2.0 s 時切換開始,按照期望的發動機轉速變化調節,在2.8 s時使得發動機從靜止加速到點火轉速800 r/min,完成第1階段發動機起動過程;3.1 s時發動機轉速自調節到1 200 r/min,3.1~3.4 s由離合器滑摩將發動機轉速帶到同步轉速1 300 r/min,離合器鎖止,完成第2階段發動機調速過程;3.4 s之后發動機和電機的扭矩重新分配,到3.7 s扭矩分配結束,完成第3階段發動機動力接入階段。至此完成了整個模式切換過程。 無扭矩協調控制和有扭矩協調控制的仿真結果分別如圖7、圖8所示,電機的響應時間與發動機相比相當短,因此在無扭矩協調時可等效為瞬變輸出[4]。在該切換過程中,圖7a和圖8a為轉速跟蹤控制效果,整個過程控制效果較好,實際轉速符合期望;通過分析對比圖7b和圖8b可知,無扭矩協調控制時,電機和發動機扭矩波動較大,而有扭矩協調時,電機和發動機扭矩波動較小;通過對比圖7c和圖8c可知,有扭矩協調與無扭矩協調離合器油壓相比,油壓的變化較為平緩,利于離合器的控制;對比圖7d和圖8d可知,無扭矩協調時沖擊度較大,最大值達到34.8 m/s3,對車輛產生了較大的沖擊,影響了整車平順性,而有扭矩協調時,沖擊度得到了明顯的改善,最大值僅為8.09 m/s3,完全符合我國的沖擊度指標要求,有效改善了整車的平順性。 圖7 無扭矩協調控制的仿真結果 圖8 扭矩協調控制的仿真結果 (1) 本文針對并聯混合動力系統驅動模式切換過程,設計了扭矩協調控制策略,采用電動機扭矩響應迅速的優點,較好地彌補了發動機扭矩響應滯后的缺點,以減小混合動力汽車模式切換過程中的沖擊,從而較好地保證并聯混合動力系統對扭矩傳遞穩定性和整車平順性的要求。 (2) 對本文策略進行仿真驗證分析,仿真結果表明,本文所設計的策略能有效減小扭矩波動和整車沖擊度,提高了模式切換過程中的車輛平順性。 [1] 趙韓,徐承付,尹安東,等.ISG型中度HEV控制策略優化算法研究[J].合肥工業大學學報(自然科學版),2013,36(9):1025-1028. [2] 倪成群,張幽彤,趙強,等.混合動力離合器接合過程的動態扭矩控制策略[J].機械工程學報,2013,49(4):114-121. [3] PARK J.Development of engine clutch control for parallel hybrid vehicles[C]//Electric Vehicle Symposium and Exhibition.[S.l.]:IEEE, 2013:1-5. [4] 童毅.并聯式混合動力系統動態協調控制問題的研究[D].北京:清華大學,2004. [5] 嚴運兵,顏伏伍,杜常清.并聯混合動力電動汽車動態協調控制策略及仿真研究[J].中國機械工程,2010,21(2):234-239. [6] 張娜,趙峰,羅禹貢,等.基于電機轉速閉環控制的混合動力汽車模式切換動態協調控制策略[J].汽車工程,2014,36(2):134-138 [7] KOPRUBASI K.Modeling and control of a hybrid-electric vehicle for drivability and fuel economy improvements[D].Columbus:Ohio State University,2008. [8] 楊陽,黃劍鋒,秦大同,等.雙離合器式混合動力汽車模式切換控制策略[J].汽車工程,2013,35(8):723-730. [9] 杜波,秦大同,段志輝,等.新型并聯式混合動力汽車工作模式切換扭矩協調控制策略研究[J].中國機械工程,2013,23(6):739-744. [10] 戴一凡,羅禹貢,李克強,等.單電機強混合動力電動車輛的動態協調控制[J].汽車工程,2011,33(12):1007-1012. [11] 張俊智,李波,薛俊亮,等.混合動力電動汽車沖擊度的試驗[J].機械工程學報,2008,44(4):87-91. [12] 陳海軍,趙治國,王琪,等.干式DCT雙離合器聯合起步最優協調控制[J].機械工程學報,2014,50(22):150-164. (責任編輯 胡亞敏) Research on torque coordinated control strategy for hybrid electric vehicle in E-H mode switch KONG Huifang, WANG Rui, BAO Wei (School of Electric Engineering and Automation, Hefei University of Technology, Hefei 230009, China) In the hybrid electric vehicle(HEV) mode switch from the electric drive mode(E) to the hybrid drive mode(H), the difference of the response characteristics of the two power sources and clutch engagement will cause the problems of the unstable power transmission and the impact of the vehicle. To solve this problem, the torque coordinated control strategy is formulated. The entire torque coordinated control strategy is formulated according to three different stages of engine starting, speed governing and power access. HEV physical model and mode-switching dynamics model are built by Matlab/Simulink simulation to verify the effectiveness of the strategy. The simulation results show that the strategy can reduce the torque fluctuation and the jerk, effectively improving the smoothness in the process of mode switch. hybrid electric vehicle(HEV); torque coordinated control; mode switch; jerk 2016-01-06; 2016-02-28 國家“十二五”科技支撐計劃資助項目(2014BAG06B02);中央高校基本科研業務費專項資金資助項目(2014HGCH0003) 孔慧芳(1964-),女,安徽蚌埠人,博士,合肥工業大學教授,博士生導師. 10.3969/j.issn.1003-5060.2017.03.001 TP271.4 A 1003-5060(2017)03-0289-063 評價指標

4 仿真實驗



5 結 論
猜你喜歡
汽車維修與保養(2021年8期)2021-02-16 00:28:30
汽車維修與保養(2021年8期)2021-02-16 00:28:18
能源工程(2020年6期)2021-01-26 00:55:22
山東冶金(2019年3期)2019-07-10 00:54:04
消費導刊(2018年10期)2018-08-20 02:57:02
通信電源技術(2016年1期)2016-04-16 04:57:26
電測與儀表(2016年20期)2016-04-11 11:38:24
汽車與新動力(2015年1期)2015-02-27 12:11:01
電測與儀表(2014年17期)2014-04-04 11:56:50
汽車與新動力(2014年2期)2014-02-27 12:10:15
