基于LabVIEW控制的小型太陽跟蹤發(fā)電系統(tǒng)
2017-04-24 08:15:56孔麗晶曹藝嚴(yán)石鴻基鄭晅麗陳曉航吳志明
物理實(shí)驗(yàn) 2017年4期
孔麗晶,曹藝嚴(yán),石鴻基,鄭晅麗,陳曉航,吳志明
(廈門大學(xué) 物理系,福建 廈門 361005)


基于LabVIEW控制的小型太陽跟蹤發(fā)電系統(tǒng)
孔麗晶,曹藝嚴(yán),石鴻基,鄭晅麗,陳曉航,吳志明
(廈門大學(xué) 物理系,福建 廈門 361005)
根據(jù)視日運(yùn)動(dòng)軌跡跟蹤算法,以步進(jìn)電機(jī)為執(zhí)行機(jī)構(gòu),設(shè)計(jì)了基于LabVIEW和串口控制的太陽跟蹤發(fā)電系統(tǒng). 該系統(tǒng)通過計(jì)算機(jī)串口控制步進(jìn)電機(jī),帶動(dòng)太陽電池板實(shí)時(shí)、自動(dòng)地跟蹤太陽. 該設(shè)計(jì)提高了光伏發(fā)電系統(tǒng)的轉(zhuǎn)換效率.
太陽能發(fā)電;跟蹤系統(tǒng);LabVIEW
太陽能作為一種綠色、可再生能源,其開發(fā)利用對緩解日益嚴(yán)峻的能源危機(jī)有著十分重要的意義. 然而,由于成本較高,光伏發(fā)電技術(shù)目前還未進(jìn)入主流的電力市場. 為了提高地面光伏發(fā)電競爭力,可以通過聚光發(fā)電的形式,使光伏系統(tǒng)具有更優(yōu)的性價(jià)比,而如何以較低的成本,便捷、準(zhǔn)確地實(shí)現(xiàn)太陽跟蹤是這項(xiàng)技術(shù)的關(guān)鍵. 太陽跟蹤方式主要分光電式和機(jī)械式. 前者為被動(dòng)跟蹤,受環(huán)境影響較大(尤其在多云或陰雨天時(shí));后者為主動(dòng)式,指的是控制信號來自于控制器中預(yù)先存儲的與當(dāng)?shù)亟?jīng)緯度相關(guān)的太陽運(yùn)行軌跡函數(shù),即視日運(yùn)動(dòng)軌跡跟蹤法. 本文采用機(jī)械式跟蹤方式,以步進(jìn)電機(jī)作為執(zhí)行機(jī)構(gòu),基于LabVIEW和串口控制,設(shè)計(jì)了小型太陽跟蹤發(fā)電系統(tǒng). 研究結(jié)果表明:該系統(tǒng)操作方便、運(yùn)行良好、功能豐富.
1 系統(tǒng)機(jī)械結(jié)構(gòu)
太陽能跟蹤系統(tǒng)根據(jù)系統(tǒng)轉(zhuǎn)動(dòng)部件中所含轉(zhuǎn)動(dòng)軸的個(gè)數(shù),可以將跟蹤方式分為單軸跟蹤和雙軸跟蹤. 由于太陽高度角每天變化不大,因此單軸跟蹤一般都是在東西方向上跟蹤太陽方位角變化,而高度角只作季節(jié)性調(diào)整. 雙軸跟蹤則是同時(shí)控制系統(tǒng)方位角和高度角,既跟蹤太陽東升西落,又跟蹤太陽在一年四季的仰角變化. 由于雙軸跟蹤精度較高,故其發(fā)電量一般會比單軸高10%,但其系統(tǒng)構(gòu)成相對復(fù)雜,成本和能耗也高[1]. 考慮到系統(tǒng)造價(jià)、維護(hù)成本,以及實(shí)際的使用環(huán)境,本項(xiàng)目采用性價(jià)比相對較高的單軸跟蹤方式,因此只需1臺步進(jìn)電機(jī),且步進(jìn)電機(jī)的選型及其安裝位置考慮了系統(tǒng)的可行性及其能量消耗. 圖1為發(fā)電系統(tǒng)的機(jī)械結(jié)構(gòu),全框架所用材料具有良好的散熱性能[2].

圖1 發(fā)電系統(tǒng)機(jī)械構(gòu)架
2 硬件電路設(shè)計(jì)
用計(jì)算機(jī)控制步進(jìn)電機(jī)一般的做法是在其擴(kuò)展槽上安裝步進(jìn)控制卡,這種方法不僅成本較高,而且不便于操作. 近年來,出現(xiàn)了將計(jì)算機(jī)串口進(jìn)行二次開發(fā),用于電機(jī)控制的技術(shù),具有成本低、操作簡單、兼容性好等優(yōu)點(diǎn)[3-9].
2.1 RS232串口控制步進(jìn)電機(jī)工作原理
該系統(tǒng)用到的串口見圖2(a),其發(fā)送數(shù)據(jù)的過程如圖2(b)所示,大致為:先發(fā)送起始位(邏輯“0”)進(jìn)行同步,接著按規(guī)定的波特率從低位到高位依次發(fā)送通訊數(shù)據(jù)的各二進(jìn)制位,最后發(fā)送停止位(邏輯“1”). 可見,通過改變發(fā)送的字節(jié)數(shù)及所發(fā)送的字節(jié)內(nèi)容,可在TXD(發(fā)送數(shù)據(jù))端產(chǎn)生任意數(shù)量的脈沖,而改變波特率可動(dòng)態(tài)調(diào)整發(fā)送脈沖的頻率.
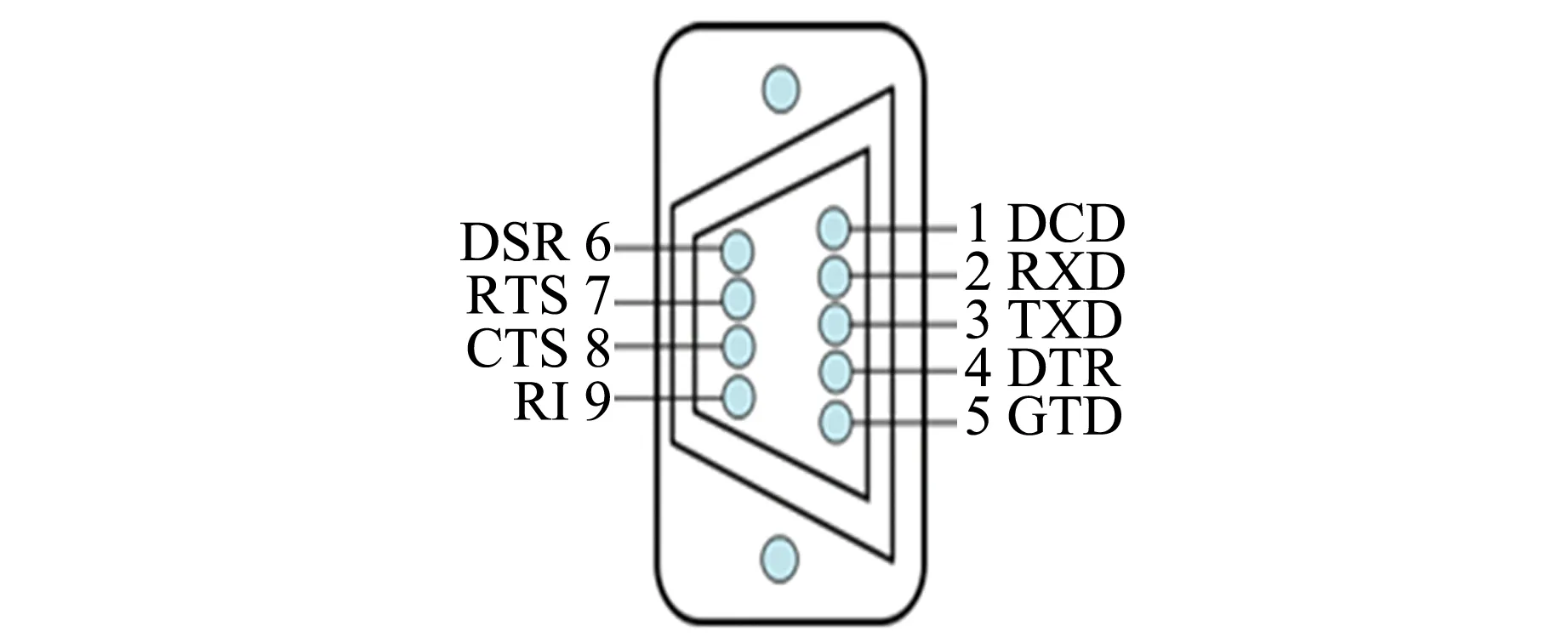
(a) RS232串口
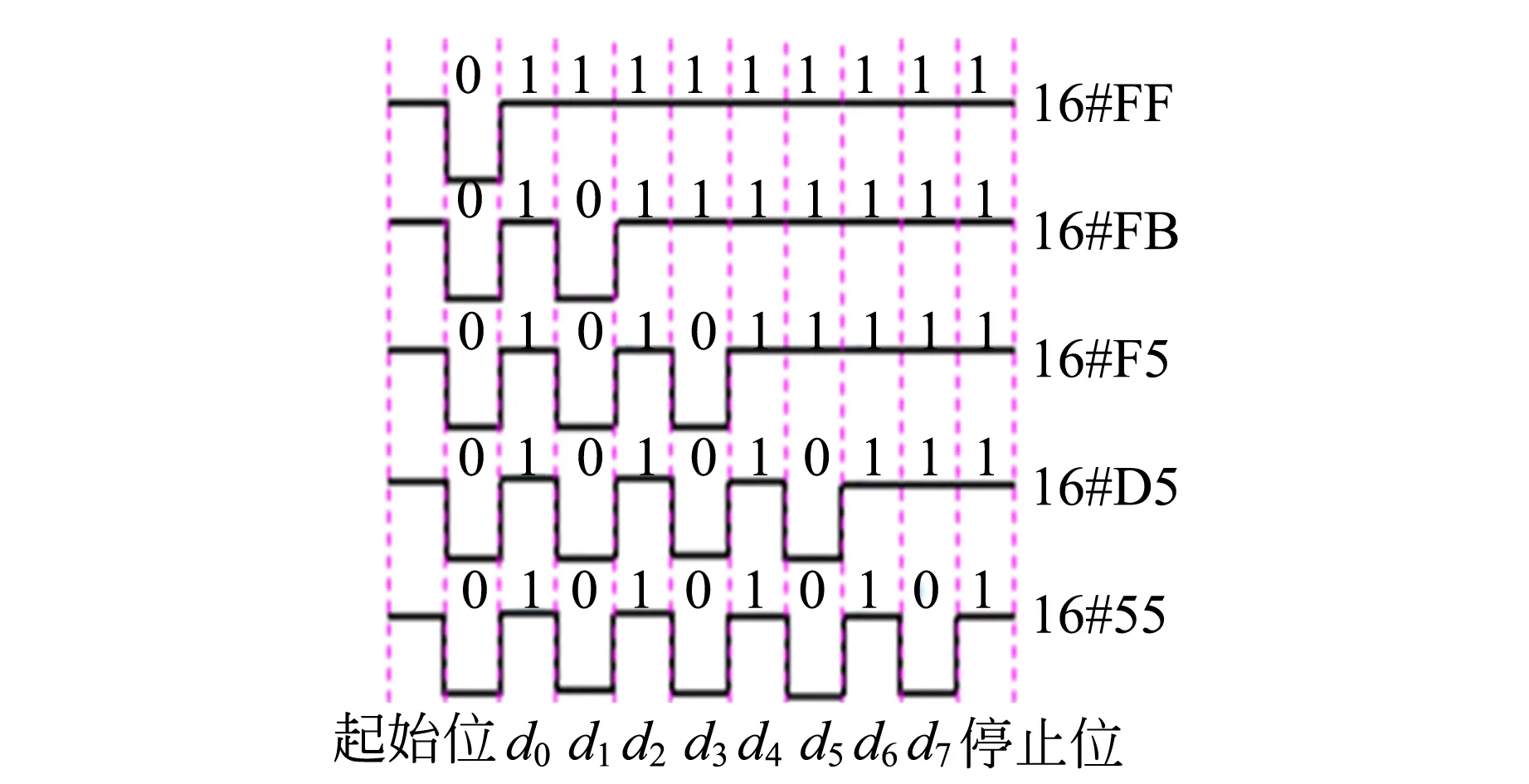
(b) 串口發(fā)送數(shù)據(jù)過程
因此,若由計(jì)算機(jī)通過RS232接口向步進(jìn)電機(jī)驅(qū)動(dòng)器發(fā)出2路控制信號:一路以TXD信號作脈沖方波信號,控制步進(jìn)電機(jī)的運(yùn)轉(zhuǎn)步數(shù);另一路以RTS信號作方向電平信號,控制電機(jī)轉(zhuǎn)動(dòng)方向,則僅用1個(gè)串口就能夠控制步進(jìn)電機(jī)的運(yùn)轉(zhuǎn)[10].
2.2 接口電路設(shè)計(jì)
由于步進(jìn)電機(jī)驅(qū)動(dòng)器的接口并不是按照串口的標(biāo)準(zhǔn)來設(shè)計(jì)和連接的,因此,為了將串口引腳與電機(jī)驅(qū)動(dòng)器的線路進(jìn)行匹配,必須設(shè)計(jì)電平轉(zhuǎn)換電路,從而實(shí)現(xiàn)RS232電平至TTL電平之間的轉(zhuǎn)換,讓計(jì)算機(jī)發(fā)出的信號能穩(wěn)定、高效地傳送到電機(jī)驅(qū)動(dòng)器上. 圖3為步進(jìn)電機(jī)及其驅(qū)動(dòng)電路的實(shí)物連接圖,圖4為串口電平轉(zhuǎn)換電路.
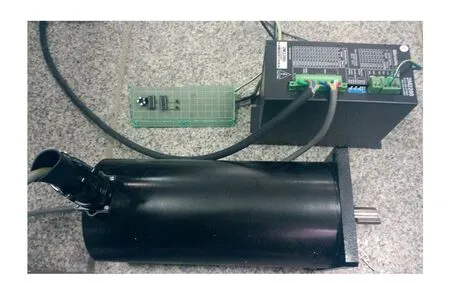
圖3 步進(jìn)電機(jī)及其驅(qū)動(dòng)電路實(shí)物圖
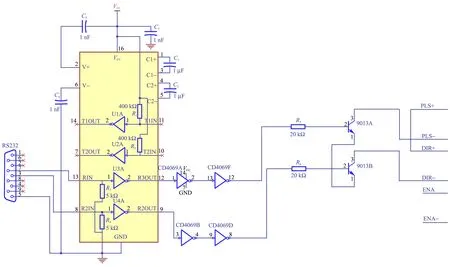
圖4 串口電平轉(zhuǎn)換電路
3 系統(tǒng)軟件設(shè)計(jì)
3.1 軟件設(shè)計(jì)平臺LabVIEW簡介
LabVIEW是由美國國家儀器公司推出的虛擬儀器開發(fā)平臺. 與傳統(tǒng)的C和BASIC等基于文本語言產(chǎn)生代碼的開發(fā)環(huán)境相比,LabVIEW使用的是流程化圖形縮程語言,具有直觀簡單、易于操作的特點(diǎn),可使沒有豐富編程經(jīng)驗(yàn)的工程人員從繁重的程序代碼編寫工作中解脫出來,將更多的精力放在測試上[11-14].
3.2 軟件總體結(jié)構(gòu)
太陽跟蹤系統(tǒng)軟件是在LabVIEW 8.20 環(huán)境中開發(fā)完成的,其主界面如圖5所示,主要包括參量初始化、手動(dòng)調(diào)整、自動(dòng)跟蹤及復(fù)位等.
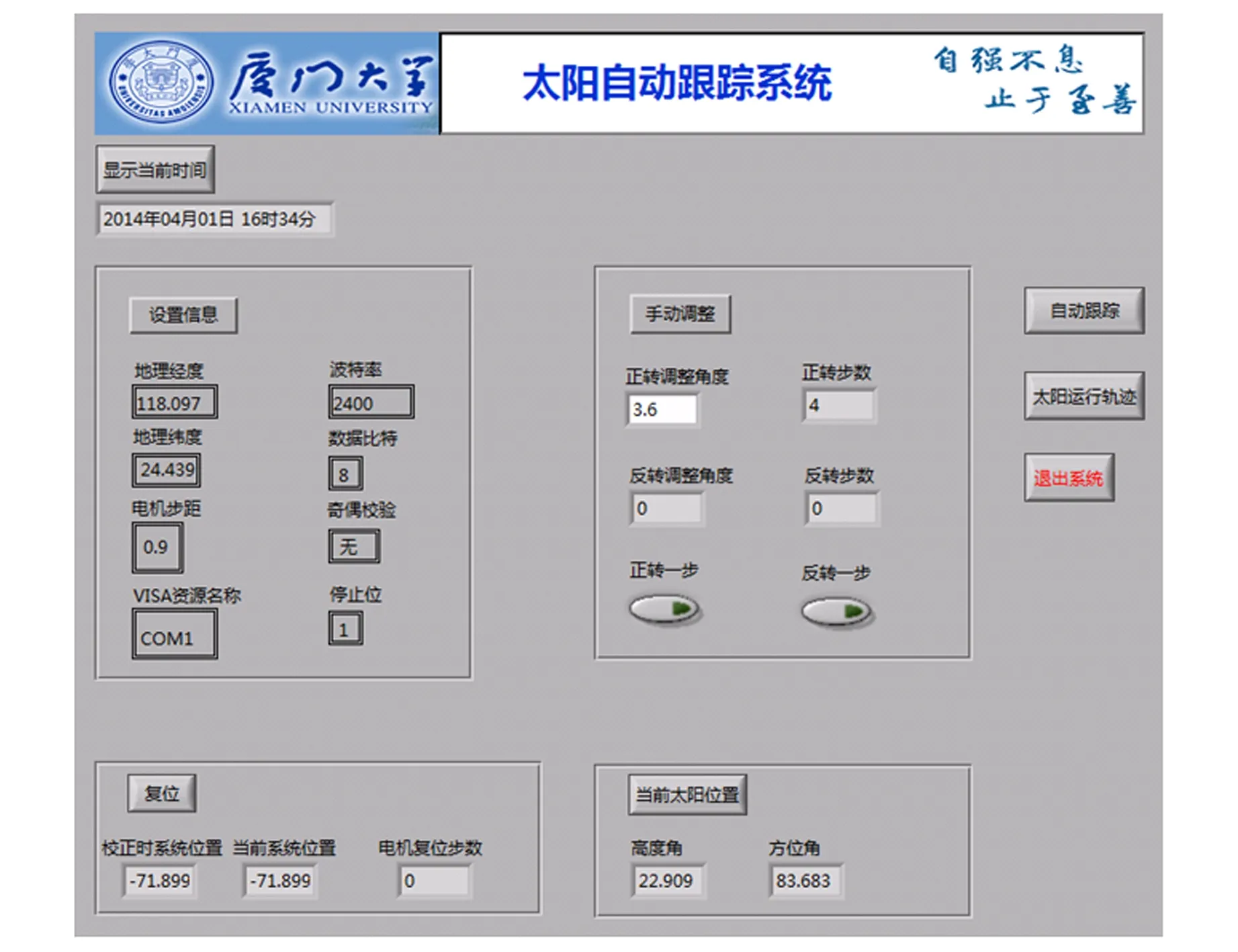
圖5 軟件主界面
程序設(shè)計(jì)思路是:跟蹤開始前,先對系統(tǒng)參量進(jìn)行初始化,包括當(dāng)?shù)氐牡乩斫?jīng)度、緯度、步進(jìn)電機(jī)的步距角、串口資源配置等. 初始化模塊還用來判斷跟蹤系統(tǒng)是否位于機(jī)械原點(diǎn),若不在機(jī)械原點(diǎn)則進(jìn)行復(fù)位操作. 首次使用該系統(tǒng)時(shí),需先校正機(jī)械系統(tǒng)原點(diǎn),手動(dòng)調(diào)整太陽電池板,使之正對太陽,并記錄校正時(shí)間. 初始化工作完成后,啟動(dòng)自動(dòng)跟蹤,系統(tǒng)將自動(dòng)獲取計(jì)算機(jī)當(dāng)前時(shí)間,判斷其是否在預(yù)設(shè)的跟蹤起止時(shí)間內(nèi). 如果當(dāng)前時(shí)間不在預(yù)設(shè)的時(shí)間范圍內(nèi),則系統(tǒng)進(jìn)入等待狀態(tài),一段時(shí)間后重新判斷當(dāng)前時(shí)間是否滿足跟蹤條件;如果滿足,則系統(tǒng)進(jìn)入視日運(yùn)動(dòng)軌跡跟蹤模式,計(jì)算出當(dāng)前太陽位置與系統(tǒng)位置的差角,調(diào)整跟蹤系統(tǒng)位置. 根據(jù)設(shè)計(jì),系統(tǒng)每隔1 min計(jì)算1次目標(biāo)位置與當(dāng)前系統(tǒng)位置的差值,由軟件通過串口控制電機(jī),帶動(dòng)太陽電池板轉(zhuǎn)向目標(biāo)位置. 如此循環(huán),直至?xí)r間到達(dá)預(yù)設(shè)的跟蹤結(jié)束時(shí)間為止,然后系統(tǒng)自動(dòng)復(fù)位,等待新的一天開始. 系統(tǒng)主程序流程圖見圖6.

圖6 跟蹤系統(tǒng)主程序流程圖
3.3 太陽位置計(jì)算
天文學(xué)上,太陽的觀測位置可根據(jù)當(dāng)?shù)氐牡乩砦恢煤蜁r(shí)間來確定. 視日運(yùn)動(dòng)軌跡跟蹤的原理正是根據(jù)太陽運(yùn)行軌跡,由天文學(xué)公式計(jì)算出每一時(shí)刻的太陽高度角與方位角參量,再利用計(jì)算機(jī)帶動(dòng)跟蹤裝置,實(shí)現(xiàn)跟蹤太陽的目的[15-20].
太陽位置計(jì)算程序嚴(yán)格按照相關(guān)天文學(xué)公式編制而成. 圖7為廈門大學(xué)夏季某日08:57至17:00太陽方位角變化的軟件計(jì)算結(jié)果.
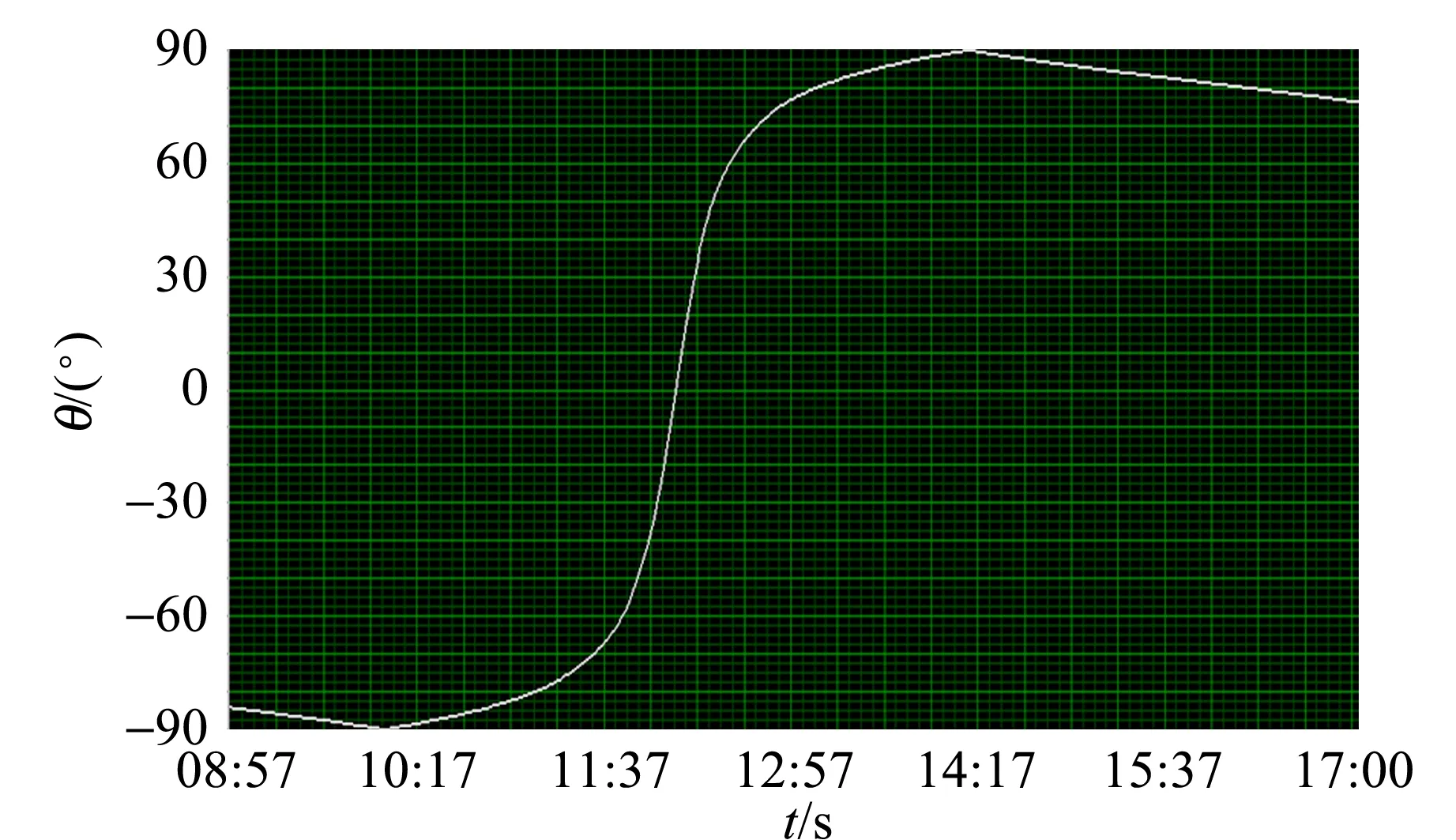
圖7 太陽方位角變化軌跡
3.4 步進(jìn)電機(jī)控制程序
程序通過屬性節(jié)點(diǎn)設(shè)置串口RTS引腳的狀態(tài)并發(fā)送至RTS信號線上,作為控制電機(jī)轉(zhuǎn)動(dòng)的方向信號;同時(shí)將十六進(jìn)制“FF”通過VISA寫入函數(shù)發(fā)送到TXD引腳上,作為步進(jìn)脈沖信號,脈沖數(shù)由程序循環(huán)次數(shù)決定. 因方向信號需先行于脈沖信號,故程序采用順序結(jié)構(gòu)加上一定的延時(shí)來實(shí)現(xiàn). 圖8為示波器實(shí)測的TXD(CH1通道)和RTS(CH2通道)引腳信號.
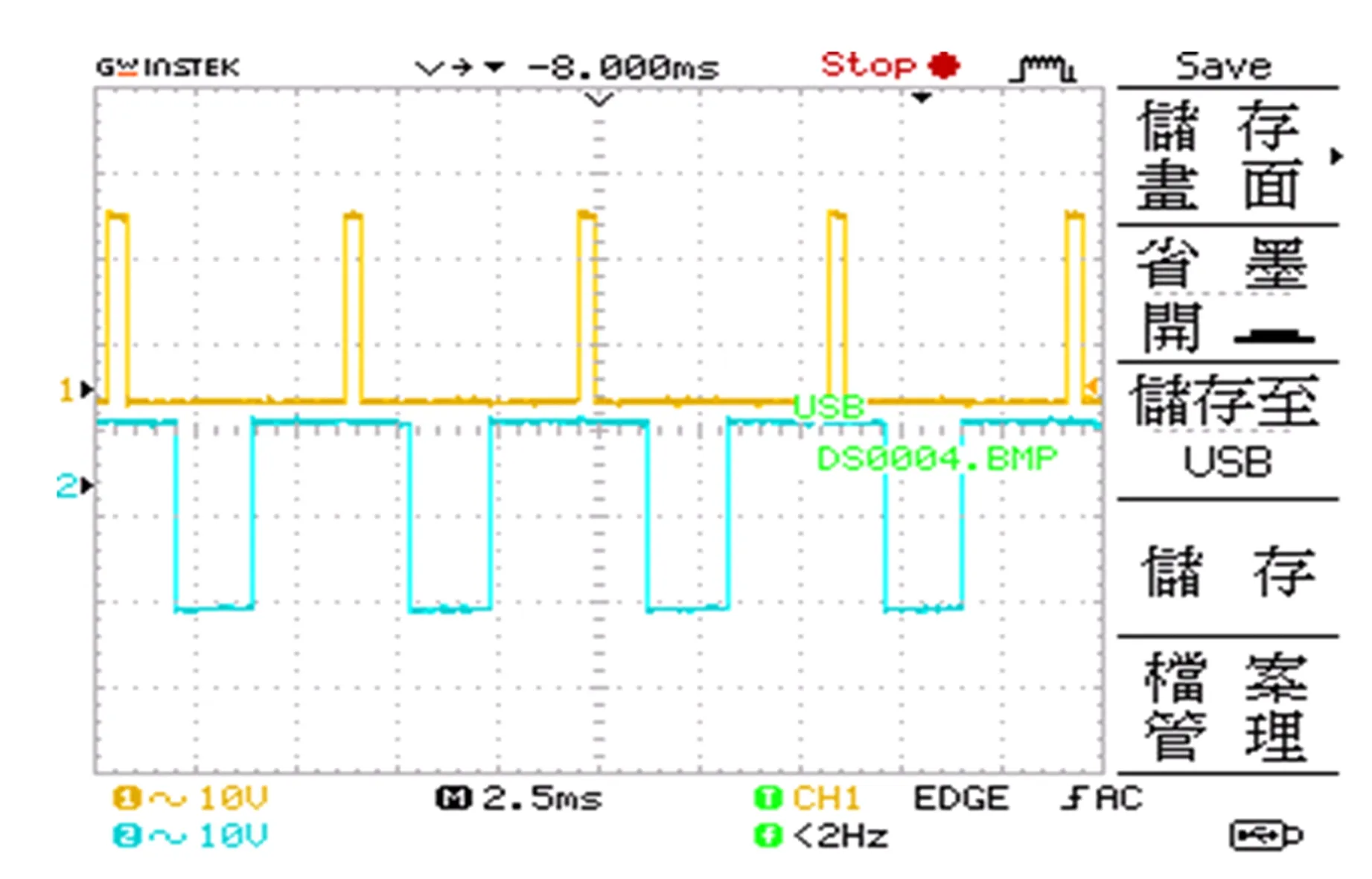
圖8 示波器實(shí)測步進(jìn)脈沖和方向信號
3.5 復(fù)位程序
輸入校正時(shí)間后,程序自動(dòng)計(jì)算該時(shí)刻的太陽方位角并存入文本jfr.txt,作為系統(tǒng)原點(diǎn)位置. 進(jìn)行復(fù)位操作時(shí),利用讀取文本文件函數(shù)將文本jfr.txt和jr.txt中保存的角度值取出作差. 由于運(yùn)行自動(dòng)跟蹤模塊時(shí),程序是以即時(shí)更新的形式將系統(tǒng)位置對應(yīng)的角度存入文本jr.txt中,因此,當(dāng)跟蹤結(jié)束后,保留在該文本中的角度值就代表了當(dāng)前系統(tǒng)的位置. 通過比較校正時(shí)系統(tǒng)位置與當(dāng)前系統(tǒng)位置的角度差,就可以得到電機(jī)所需轉(zhuǎn)動(dòng)的步數(shù),然后通過調(diào)用相應(yīng)的電機(jī)控制程序,帶動(dòng)機(jī)械系統(tǒng)回零. 復(fù)位程序框圖見圖9.
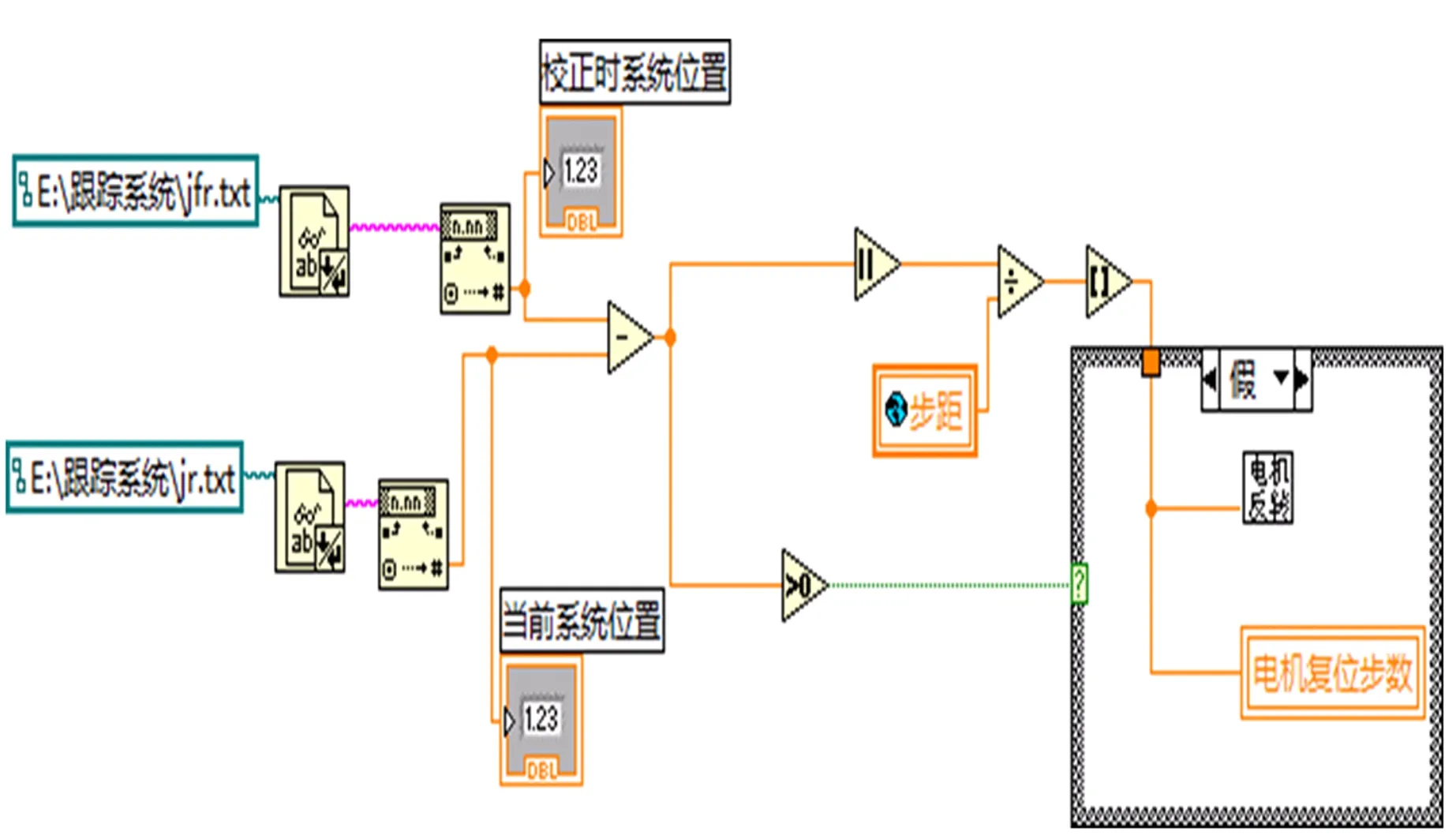
圖9 復(fù)位程序框圖
4 結(jié)束語
本文從軟、硬件兩方面入手,根據(jù)視日運(yùn)動(dòng)軌跡跟蹤算法,通過計(jì)算機(jī)串口控制步進(jìn)電機(jī),帶動(dòng)太陽電池板實(shí)時(shí)、自動(dòng)跟蹤太陽,從而提高了太陽電池對太陽光的轉(zhuǎn)換效率,降低了發(fā)電系統(tǒng)成本. 實(shí)驗(yàn)表明:該系統(tǒng)不論是軟件程序的運(yùn)算執(zhí)行,還是硬件設(shè)備的驅(qū)動(dòng)運(yùn)行,都基本實(shí)現(xiàn)了預(yù)期目標(biāo).
[1] 許啟明,馮俊偉,宮明. 太陽能利用跟蹤技術(shù)的研究進(jìn)展[J]. 安徽農(nóng)業(yè)科學(xué),2011,39(10):6294-6297.
[2] 盧鑫. 基于聚光型光伏模組的太陽跟蹤系統(tǒng)結(jié)構(gòu)設(shè)計(jì)及性能分析[D]. 長春:長春理工大學(xué),2010.
[3] 楊林,王曉光. Labview控制步進(jìn)電機(jī)[J]. 微計(jì)算機(jī)信息,2004,34(2):7-8.
[4] 莊瑞榮,吳先球. 基于LabVIEW的步進(jìn)電機(jī)控制[J]. 現(xiàn)代電子技術(shù),2012,35(4):202-204.
[5] 王繼業(yè). 用串行口控制步進(jìn)電機(jī)兩維運(yùn)動(dòng)系統(tǒng)[J]. 微計(jì)算機(jī)信息,2007,23(7):130.
[6] 謝其德,張?jiān)圃? 利用串口實(shí)現(xiàn)步進(jìn)電機(jī)的控制[J]. 現(xiàn)代電子技術(shù),2004,27(3):9-11.
[7] 陳晉瑋,盧道華. 用VC實(shí)現(xiàn)PC機(jī)串口對步進(jìn)電機(jī)的控制[J]. 微機(jī)發(fā)展,2003,13(5):55-56.
[8] 蔣敬,吳本科,高健,等. 虛擬儀器通過串行接口控制步進(jìn)電機(jī)的設(shè)計(jì)[J]. 電子科技,2012,25(8):46-48.
[9] 呂紅英,顧明華,李凌燕,等. 基于LabVIEW的亥姆霍茲線圈磁場自動(dòng)測量系統(tǒng)[J]. 物理實(shí)驗(yàn),2014,34(5):20-23.
[10] 隋振,李明哲,蔡中義,等. 一種直接采用計(jì)算機(jī)串行口控制步進(jìn)電機(jī)的新方法[J]. 電子技術(shù)應(yīng)用,2002,28(8):26-28.
[11] 張重雄. 虛擬儀器技術(shù)分析與設(shè)計(jì)[M]. 北京:電子工業(yè)出版社,2007.
[12] 陳錫輝,張銀鴻. LabVIEW 8.20 程序設(shè)計(jì)從入門到精通[M]. 北京:清華大學(xué)出版社,2007.
[13] 王力,施蕓城,楊忠杰,等. 基于LabVIEW的鎖相放大器的設(shè)計(jì)與測量[J]. 物理實(shí)驗(yàn),2015,35(9):33-36.
[14] 戴皓珽,倪晨,方愷,等. 基于LabVIEW研究硅光電池特性[J]. 物理實(shí)驗(yàn),2014,34(10):18-25.
[15] Cooper P. The absorption of radiation in solar stills [J]. Solar Energy, 1969,12 (3):333-346.
[16] 中國科學(xué)院紫金山天文臺. 中國天文年歷仁[M]. 北京:科學(xué)出版社,1986.
[17] 馬健,向平,趙衛(wèi)鳳,等. 基于步進(jìn)電機(jī)的太陽跟蹤系統(tǒng)設(shè)計(jì)[J]. 電力電子技術(shù),2008,42(9):34-36.
[18] 張文青. 基于虛擬儀器的太陽能自動(dòng)跟蹤系統(tǒng)的研究與設(shè)計(jì)[D]. 南京:南京理工大學(xué),2011.
[19] 路博. 光伏系統(tǒng)中的高精度太陽跟蹤方法研究[D]. 新鄉(xiāng):河南師范大學(xué),2012.
[20] 曾利霞. 基于視日運(yùn)動(dòng)軌跡的雙軸太陽跟蹤系統(tǒng)的研究[D]. 武漢:湖北工業(yè)大學(xué),2012.
[責(zé)任編輯:尹冬梅]
Sun-tracking solar power system based on LabVIEW
KONG Li-jing, CAO Yi-yan, SHI Hong-ji,ZHENG Xuan-li, CHEN Xiao-hang, WU Zhi-ming
(Department of Physics, Xiamen University, Xiamen 361005, China)
Based on high-precision sun-tracking algorithm and LabVIEW platform, a sun-tracking solar power system was designed with a stepper motor as the executing agency. To automatically drive the solar panel to track the sun in real-time, the system used a computer to control the stepper motor through a serial port. The improved deign had a good human-computer interface, increased the conversion efficiency of the system.
solar power; tracking system; LabVIEW
2016-05-31
孔麗晶(1982-),女,福建莆田人,廈門大學(xué)物理系工程師,碩士,主要從事基礎(chǔ)物理實(shí)驗(yàn)教學(xué)和太陽能電池研究工作.
TK513.4
A
1005-4642(2017)04-0011-05
“第9屆全國高等學(xué)校物理實(shí)驗(yàn)教學(xué)研討會”論文
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
考試與評價(jià)·高一版(2020年6期)2020-11-02 02:45:24
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
鑿巖機(jī)械氣動(dòng)工具(2016年3期)2016-03-01 04:00:25
