基于STM32的緊急醫療救援無人機系統
2017-04-25 09:41:53嚴梓揚蘇成悅陳金棟廣東工業大學
數碼世界 2017年4期
嚴梓揚 蘇成悅 陳金棟 廣東工業大學
基于STM32的緊急醫療救援無人機系統
嚴梓揚 蘇成悅 陳金棟 廣東工業大學
本文介紹了一種針對當前醫療市場需求設計的一種用于醫療急救、應急運輸的智能空中搭載系統,以解決在短時間內克服交通、地形等障礙將應急藥物送到急救現場的問題。利用了互補濾波+卡爾曼濾波算法實現無人機的姿態控制,并基于此設計了一種無人機的自動任務模式。
無人機 應急醫療 姿態控制
1 設計方案
本系統主要工作原理如下圖1:
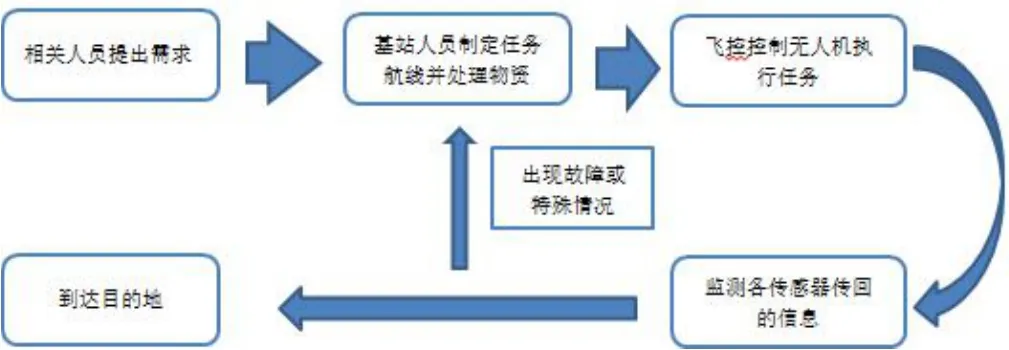
圖1 整體方案設計流程圖
由上圖1可知,當傷病員或者救護人員提出需求后,基站的處理人員只需要馬上規劃好航線并且裝載好物資,然后無人機將全程自動完成設定的任務,基站人員只需要關注地面站上傳回的無人機信息,在出現故障或者特殊情況時馬上采取相關措施即可,直至無人機到達目標地點。
2 控制方案的設計與論證
本飛控使用四元數互補濾波+卡爾曼濾波實現對姿態的控制,具體設計過程如下圖2:
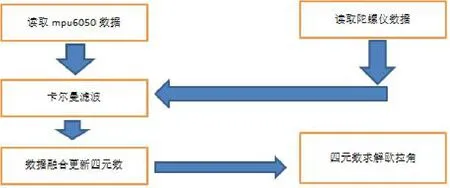
圖2 姿態算法流程圖
由于加速度計是一種線性傳感器,伴隨的噪聲會產生很大影響,因此先使用卡爾曼濾波對其進行降噪處理。通過對先驗估計X(k-1)和加權變量Z(k)及其預測HX(k)之差的線性組合構成后驗狀態估計X(k),其基本模型方程為:

經過卡爾曼濾波的ACC數據雖然已經比較穩定,但是加速度計自身的零漂會隨著時間而累積,因此我們通過將加速度計數據和陀螺儀的旋轉角數據進行加權融合:

一般陀螺儀權重占比控制在0.05以內,以達到控制陀螺儀長時間工作后產生溫漂對最終解算結果的影響。解算出的三個角度將會被用于更新四元數,然后通過利用四元數解算公式:q(n)=q(n-1)*△q求解矩陣,運算解出相對于機體坐標系的歐拉角。
最后,根據三個傾角的大小輸出對應的PWM至4個電機,完成對飛機的姿態控制。
3 自動任務模式設計
將上述控制方案應用于本系統并通過PC端以及手機端地面站實時觀看飛控回傳的姿態數據和設置航點,即可執行自動飛行任務,若地面站人員觀測到無人機數據有異常可立即中止任務。其實現思路如下圖3:
4 結論
本系統可以一定程度上促進無人機在應急醫療領域的發展,優化當前特殊地形環境對緊急醫療的約束問題。
[1]閻石.數字電子技術基礎,上[M].人民教育出版社,1981
[2]童詩白,華成英.模擬電子技術基礎(第三版)[J].200
[3]憲三野波.自主飛行機器人[M].國防工業出版社,2014
嚴梓揚(1996—),男,本科,主要研究方向為:控制科學與工程。
蘇成悅(1961—),男,通訊作者,博士,教授,主要研究方向為應用物理與控制技術。
廣東大學生科技創新培育專項資金項目(400160017)。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
測控技術(2018年12期)2018-11-25 09:37:34
北京航空航天大學學報(2017年9期)2017-12-18 07:12:25
家庭影院技術(2017年9期)2017-09-26 03:41:45
電源技術(2016年9期)2016-02-27 09:05:39
電源技術(2015年1期)2015-08-22 11:16:28